關節(jié)型機械臂伺服傳動系統(tǒng)機電耦合特性研究*
2018-08-14 02:39:08辛大奇王國勛
制造技術與機床 2018年7期
辛大奇 王 軍 孫 軍 王國勛
(①沈陽建筑大學機械工程學院, 遼寧 沈陽110168;②沈陽理工大學機械工程學院,遼寧 沈陽110159)
關節(jié)型機械臂是一類復雜機電系統(tǒng),對于復雜機電系統(tǒng)耦合與解耦問題研究方面,國內外學者對一些典型的耦合問題作過較多研究,如機器人的剛彈耦合、飛行器的流固耦合、葉輪機的葉片與中心軸的耦合,但針對機械臂伺服傳動系統(tǒng)機電耦合及解耦技術的研究相對較少。由于復雜機電系統(tǒng)存在的機電耦合問題,會直接影響機械臂的控制精度、可靠性和運行的平穩(wěn)性,對機械臂進行機電耦合建模及解耦方法的研究具有重要意義。王國彪等[1]對高精度機電設備內部結構設計耦合關系進行了研究,揭示了機電設備結構剛/強度、通風散熱和電磁兼容對設備的影響。呂浪等[2]建立了電主軸系統(tǒng)的機電耦合模型,揭示了系統(tǒng)機電參數(shù)內在的物理作用機制。文獻[3]分析了機電耦合對串聯(lián)機械臂控制器性能的影響,未探究機械結構與機械臂運動性能的關系。林利紅等[4]建立了永磁交流伺服驅動系統(tǒng)的機電耦合振動模型,仿真分析了電流調節(jié)器參數(shù)、諧波擾動等對機電耦合振動動態(tài)過程的影響。Kim H J等[5]主要從控制系統(tǒng)的角度對機械臂的加工精度和運行的穩(wěn)定性進行研究。Piltan F[6]對機械臂的并行控制系統(tǒng)進行研究,通過智能算法,提高了機械臂的加工精度。以上參考文獻對機械臂的機電耦合研究較少,并且,針對機械臂的機電耦合問題進行研究的學者,主要從單方面考慮機械結構、控制系統(tǒng)或電動機電磁參數(shù)對機械臂全局機電耦合系統(tǒng)的影響,未綜合考慮機械臂的機械結構、控制系統(tǒng)和交流電動機三者匹配對機械臂運行穩(wěn)定性和加工精度的影響。
本文通過對用于加工作業(yè)的關節(jié)型機械臂伺服傳動系統(tǒng)的機電耦合特性進行研究,旨在解決由于其機電耦合產生的問題,提高機械臂綜合性能,通過分析仿真結果,進一步探究機械臂機電耦合機理及解耦方法。為機械臂生產及伺服系統(tǒng)優(yōu)化設計、參數(shù)匹配提供理論指導。
1 復雜機電系統(tǒng)的機電耦合
關節(jié)型機械臂傳動系統(tǒng)主要包括機械系統(tǒng)、驅動系統(tǒng)和控制系統(tǒng),該復雜系統(tǒng)的機電耦合主要表現(xiàn)為電磁轉矩耦合、諧波轉矩耦合、多變量控制回路耦合和多子模塊相互耦合[1-5],使得各子系統(tǒng)之間相對獨立又相互影響。對于這樣的非線性、多變量和強耦合的復雜機電系統(tǒng),需將全局耦合關系的系統(tǒng)分解成局部耦合的子系統(tǒng),建立各自的數(shù)學模型,尋找相互耦合的各個子系統(tǒng)的耦合變量,從而建立機械臂機電系統(tǒng)的全局耦合關系。
機械臂伺服傳動系統(tǒng)受電動機驅動系統(tǒng)電磁參數(shù)、機械系統(tǒng)參數(shù)和控制系統(tǒng)參數(shù)的影響。機械結構的因素有傳動剛度、傳動誤差、傳動回程差、轉動慣量、諧振頻率和摩擦力矩[7-10]。控制系統(tǒng)參數(shù)包括系統(tǒng)開環(huán)截止頻率、帶寬頻率、時間常數(shù)、開環(huán)增益和永磁同步電動機的轉動慣量。機械結構參數(shù)和控制參數(shù)之間相互耦合,影響著機械臂伺服傳動系統(tǒng)的綜合性能。
2 關節(jié)型機械臂機電耦合建模
2.1 永磁同步電動機的建模
永磁同步電動機(PMSM,無阻尼繞組)由三相交流電流產生旋轉磁動勢建立電樞磁場,一方面切割定子繞組,并在繞組中產生感應電動勢,另一方面,以電磁力拖動轉子以同步轉速旋轉。基于各相繞組軸線構成的三相定子坐標系的PMSM的磁鏈為:
(1)
(2)
其中:L為各相繞組的自感;ψf為轉子磁鏈的等效磁鏈;θ為轉子軸線與定子A相繞組軸線夾角的電氣角度;Pn為電動機的極對數(shù)。電磁轉矩方程為:
Te=Pnφs×is
(3)
從式(1)、(2)和(3)可看出永磁同步電機本身就是一個時變、非線性、強耦合的多變量系統(tǒng),要對磁場和電流進行客觀有效控制十分困難。為了簡化模型、降低耦合度,將交流電動機的物理模型等效成類似直流電動機的模式,通常采用坐標變換。
永磁同步電動機在三相坐標系(a-b-c)下的模型向兩相定子坐標(α-β)的變換(即Park變換)和兩相定子坐標(α-β)向同步旋轉坐標系(d-q)下的變換(即Clark變換)采用功率不變約束條件,可以得到旋轉坐標系下永磁同步電動機的狀態(tài)方程:
(4)
其中:Te為電磁轉矩;TL為負載轉矩;D為粘滯摩擦系數(shù);wm為轉子機械角速度;we為定子旋轉磁場角速度,也是轉子旋轉角速度,即同步角速度,we=Pnwm;J為電動機和負載的轉動慣量之和。
2.2 機械臂伺服傳動系統(tǒng)模型
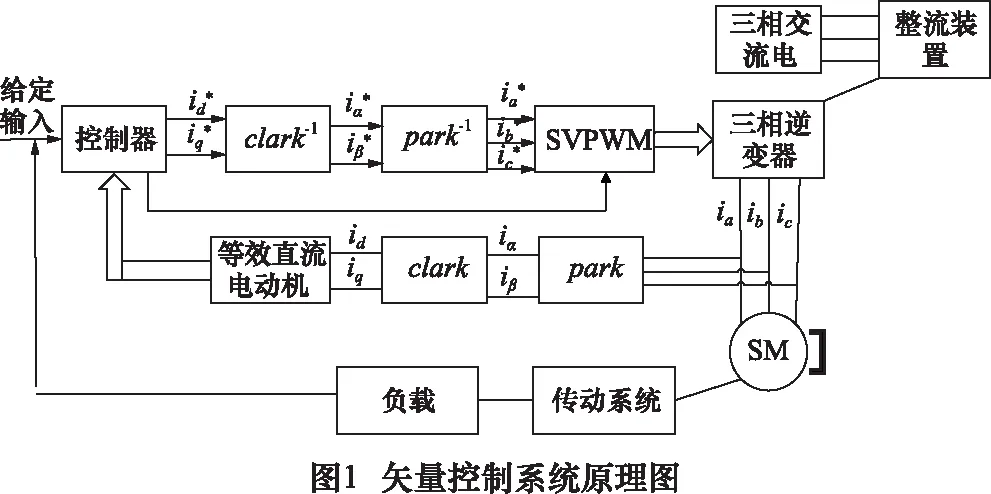
永磁同步電動機是時變、非線性、強耦合的多變量系統(tǒng),本文采用按轉子磁鏈定向的矢量控制系統(tǒng),系統(tǒng)原理如圖1所示。
機械傳動系統(tǒng)采用齒輪傳動系統(tǒng),針對6軸關節(jié)機械臂,1、2、3關節(jié)采用RV減速機,4、5、6關節(jié)采用諧波減速機,齒輪傳動機構的剛度較大并且為計算方便,將傳動系統(tǒng)簡化為質量-阻尼系統(tǒng)建模分析。系統(tǒng)輸入為電動機驅動力矩Ti和驅動軸轉角θi,輸出為機械臂關節(jié)運動角度θL和關節(jié)力矩TL,對輸入軸和輸出軸可得到力的平衡微分方程:
(5)
(6)
其中:Bi為電動機軸系的粘滯阻尼系數(shù);B0為機械臂軸系的粘滯阻尼系數(shù);Ji為驅動軸系的等效慣量;Jo為負載軸系的等效慣量,T是作用在齒輪副上的等效轉矩;Je為折算到負載端的總轉動慣量;Be為等效阻尼系數(shù),i為齒輪速比。
由式(5)和(6)得到輸出角度和輸入的關系為:
(7)
Ti=9.55CeIq
(8)
(9)
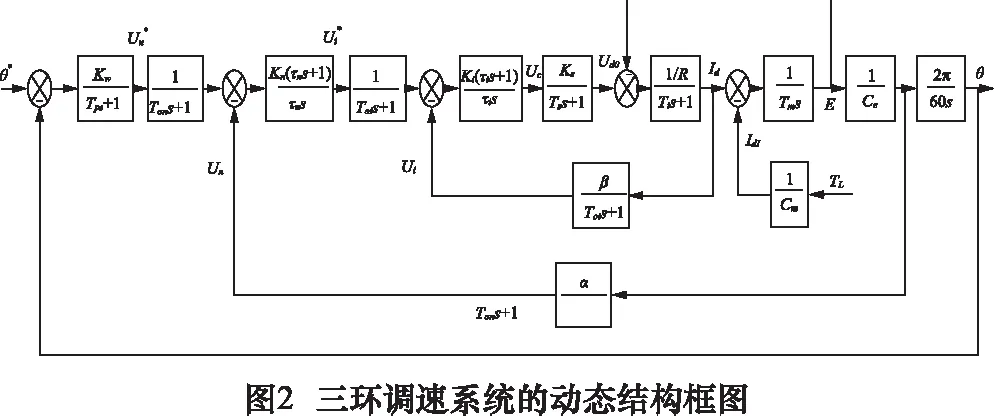
為了使機械臂運行更加穩(wěn)定,精度更高,控制系統(tǒng)采用三環(huán)控制系統(tǒng),由內環(huán)到外環(huán)分別為電流環(huán)、速度環(huán)和位置環(huán)。根據(jù)式(4)、(7)、(8)和(9)構建出機械臂關節(jié)的伺服控制系統(tǒng),其動態(tài)結構框圖如圖2所示。
電流環(huán)傳遞函數(shù)為:
轉速環(huán)傳遞函數(shù)為:
位置環(huán)傳遞函數(shù)為:
位置環(huán)的傳遞函數(shù)即三環(huán)系統(tǒng)的傳遞函數(shù)。其中:Ks和Ts分別為PWM變換器的放大系數(shù)和延遲時間;Toi、Ton分別為電流調節(jié)器和轉速調節(jié)器的濾波時間常數(shù);α、β分別為電流環(huán)和轉速環(huán)反饋系數(shù);Cm為額定勵磁下電動機轉矩系數(shù);Tm為電力拖動系統(tǒng)機電時間常數(shù),Tm=GD2R/375CeCm。
3 關節(jié)型機械臂伺服系統(tǒng)仿真分析
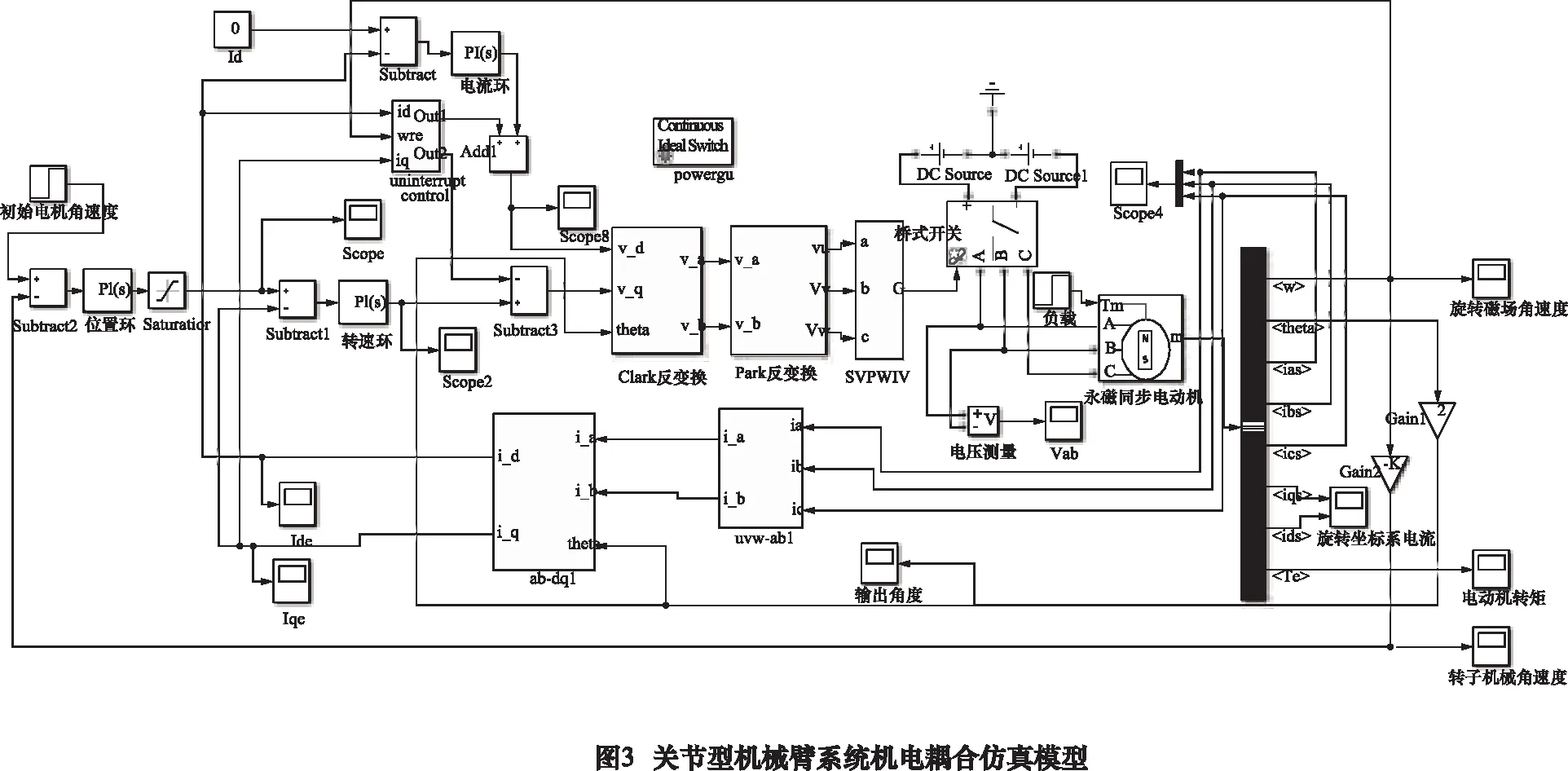
在Matlab的Simulink模塊中建立機械臂的矢量控制的機電耦合仿真模型,通過仿真分析,進一步探究機電耦合參數(shù)對機械臂動態(tài)性能的影響,為電動機與機械結構的匹配提供理論依據(jù)。
3.1 永磁同步電動機轉矩對機械臂性能的影響
為研究電動機轉矩對機械臂的影響,運用圖3建立的機電耦合模型,在0~0.2 s電動機空載運行,0.2~0.5 s電動機負載運行,在不同轉矩下,得到仿真曲線如圖4所示。
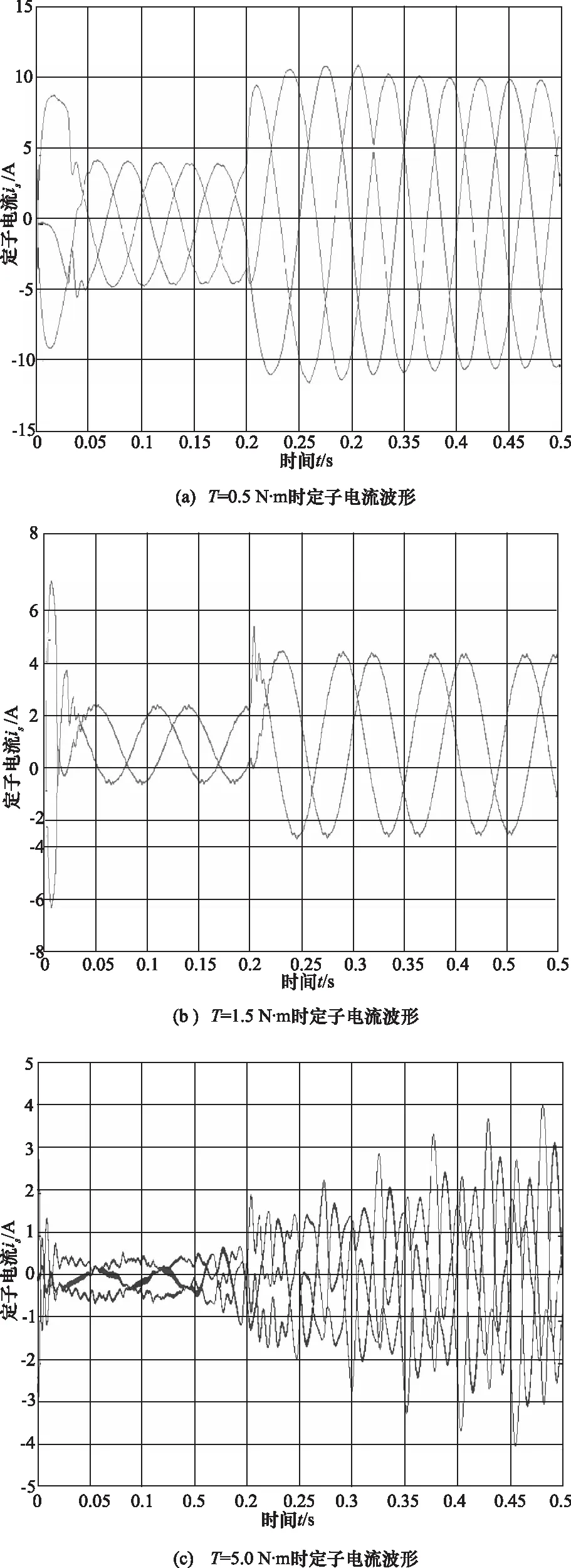
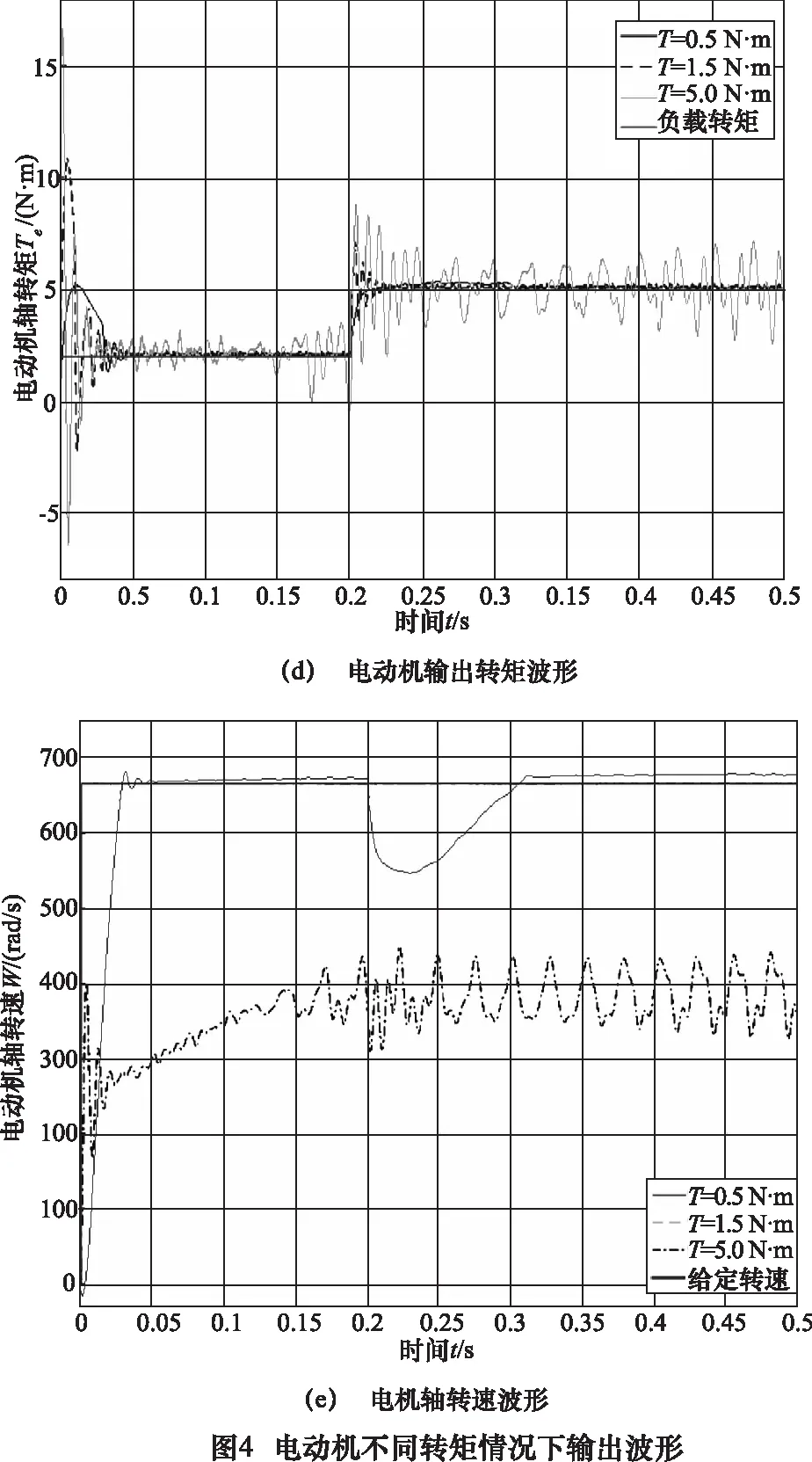
由圖4a~c可知,電機轉矩在T=0.5 N·m情況下,空載和突加負載后的定子電流波形光滑,未出現(xiàn)脈動,電動機正常運行,當轉矩增加至1.5 N·m時,定子電流在突加負載后出現(xiàn)短暫脈動,隨后趨于光滑,當T=5.0 N·m時,定子電流脈動嚴重,并且穩(wěn)定運行時峰值逐漸增大,電動機此時發(fā)熱較多,影響機械臂的長期運行。從圖4d中可以看出,隨著電動機轉矩的增加,電動機從空載運行到負載運行的轉矩脈動程度增加,在T=5.0 N·m時,電動機輸出轉矩持續(xù)脈動,機械耦合振動加劇,加工精度受到嚴重影響。當電動機轉矩不能與負載相匹配時,說明機械臂伺服系統(tǒng)不能正常跟隨給定的輸入,從圖4e中可以得到驗證,T=5.0 N·m時,轉速不僅持續(xù)脈動,還偏離給定,電動機不能穩(wěn)定運行,機械臂不能正常運轉。
3.2 永磁同步電動機轉速對機械臂工作性能的影響
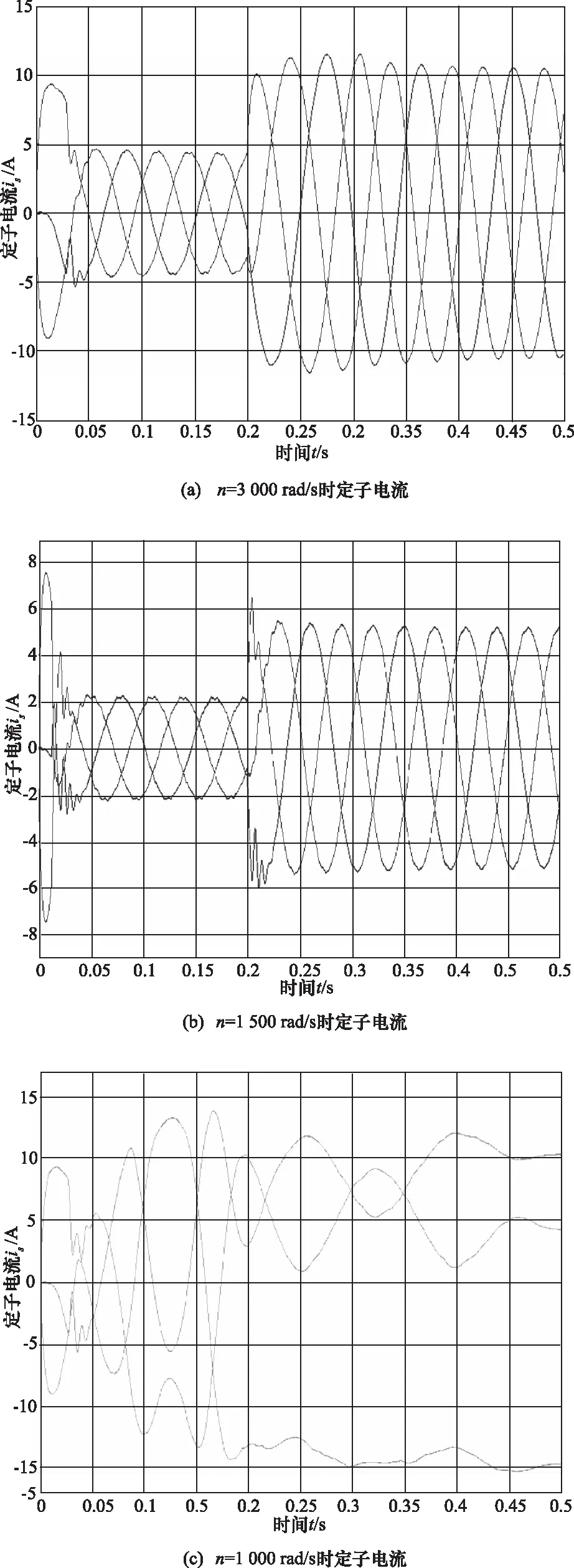
為探究電動機額定轉速與機械臂性能的關系,通過改變額定轉速參數(shù),得到如圖5的仿真曲線。
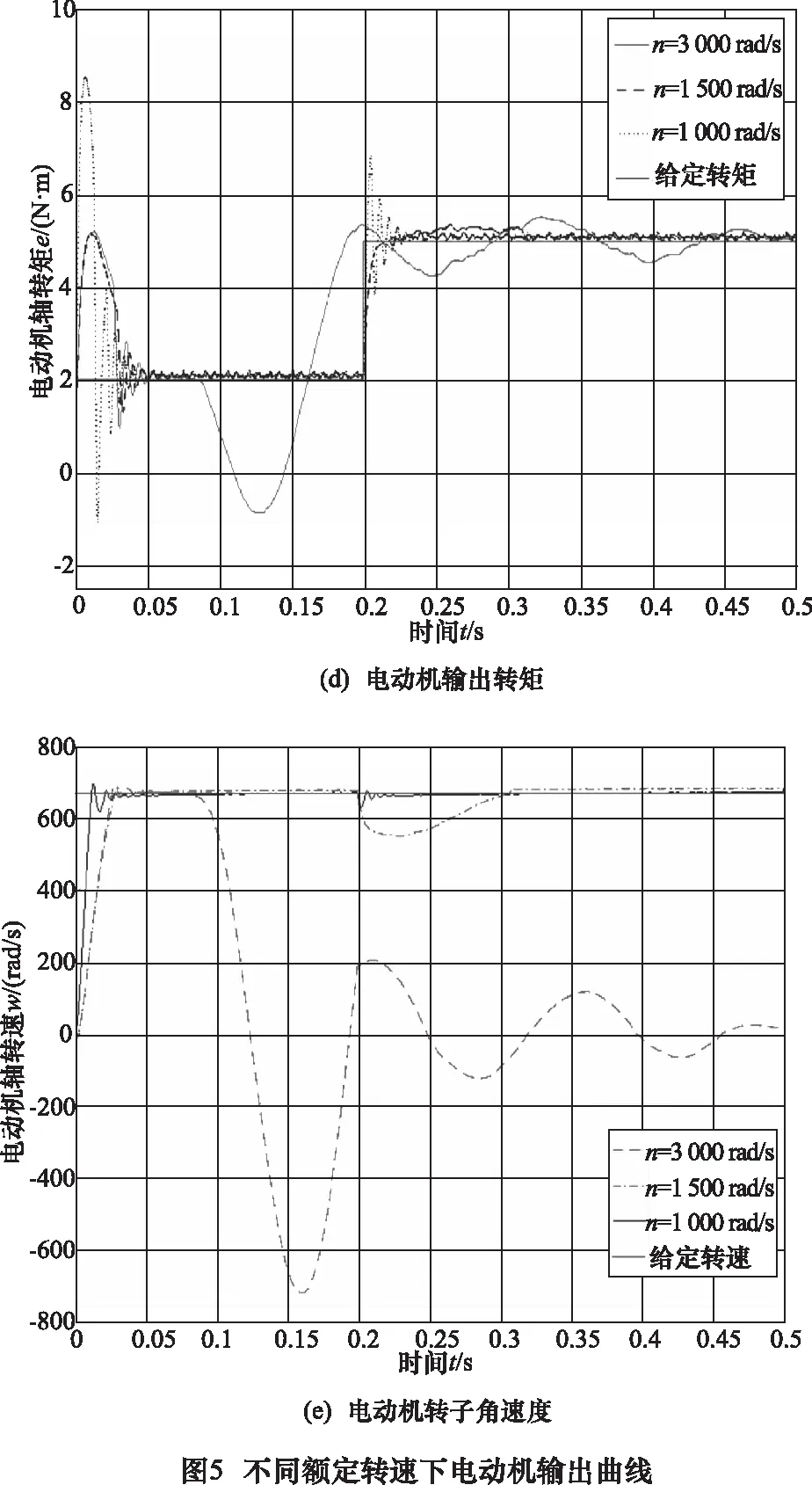
在不同的額定轉速下,負載運行時,定子電流變化情況從圖5a~c可知,轉速增加定子電流頻率減小,電動機發(fā)熱減少,有利于長期穩(wěn)定運行,但是,在n=1 000 rad/s時,三相電流發(fā)生分離,減弱了一相電流,電機會發(fā)生偏振,機械臂振動加劇,導致運行不穩(wěn),加工精度降低。由圖5d可知,隨著轉速的降低,電動機軸輸出轉矩脈動程度逐步降低,穩(wěn)定誤差進一步減小,機械臂振動程度降低,在n=3 000 rad/s時,電動機輸出轉矩一直處于脈動狀態(tài),這也就導致了機械臂的位置精度受到嚴重影響。圖5e中可以看到相應的轉速下,電機的轉速完全與目標轉速偏離,與圖5d相比,在n=1 000 rad/s時,電動機的轉速脈動很小,跟隨性能優(yōu)于1 500 rad/s。
4 結語
針對加工作業(yè)機械臂傳動系統(tǒng)存在機電參數(shù)匹配問題,利用提出的基于機械臂機電耦合模型的機電參數(shù)匹配特性分析方法,在Matlab環(huán)境中進行建模和仿真分析,得出如下結論:
(1)建立了機械臂的機電耦合模型,該模型不僅能反映電動機額定轉矩、轉速對機械臂運行的影響規(guī)律,而且能有效反映機電參數(shù)匹配對加工精度的影響。
(2)揭示了機械臂機電耦合振動隨電動機額定轉矩、轉速的變化規(guī)律。研究表明,通過優(yōu)化轉矩與轉速的匹配,有利于抑制機械臂機電耦合振動和電動機轉子偏振現(xiàn)象。
(3)在電動機轉速與轉矩不同的情況下,分別仿真分析了機械臂的動態(tài)運行特性,驗證了機電耦合仿真模型的正確性,為電動機選型、機械臂機電參數(shù)匹配奠定了理論基礎。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
電腦報(2019年40期)2019-09-10 07:22:44
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45
