拖拉機控制系統液壓驅動與電力驅動性能分析
2018-08-10 10:58:18符曉芬
農機化研究 2018年9期
符曉芬
(海南經貿職業技術學院,海口 571127)
0 引言
在我國農機設備先進控制技術及集成電子技術的發展與應用下,隨著大力研發新型低能耗拖拉機設備熱情的高漲,拖拉機的控制驅動性能的提高和改進亟待深入。拖拉機是在田間主要起到牽引、控制及帶動附屬農機設備進行高效作業的驅動裝置,其性能的好壞、部件工作質量與精準程度直接影響后序設備的工作量大小及效率。為此,從應用較為廣泛的液壓驅動與控制較為方便的電力驅動角度對拖拉機的控制系統進行性能對比分析及改進,得出較為理想的拖拉機控制驅動系統,提高拖拉機機體本身的機構緊湊與功能先進合理性,以進一步提高拖拉機的動力性能及綜合經濟性能。
1 驅動控制系統
目前,我國拖拉機的種類繁多,根據其作業環境及作業目標的不同,所選型號及驅動控制系統的部件亦不盡相同。各拖拉機的驅動控制系統關鍵執行裝置結構簡圖如圖1所示。整車驅動控制系統的核心在于電動機,對于虛擬的控制程序及系統,設置相應的模擬輸入與輸出信號傳遞通道,數據的實時處理與功率放大控制電路。為保證拖拉機驅動控制系統的穩定性與持續性,對欠壓過流及過熱保護電路應進行優化設計,以符合控制系統的各項工作要求。
在整個驅動控制系統中,驅動電機裝置與提升裝置在足夠電源供給的條件下按照作業要求進行工作,整車控制器起到核心控制作用,使各部件的液壓驅動與電力驅動實現最優化,完成控制執行動作。
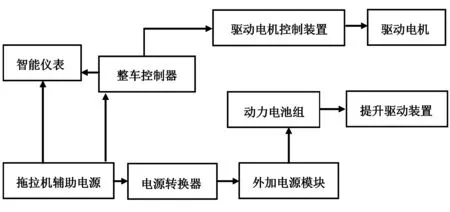
圖1 拖拉機控制系統關鍵裝置簡圖
2 驅動參數對比
2.1 液壓驅動控制
液壓驅動控制的拖拉機,其工作原理主要體現在設計優良的液壓回路,在液壓泵的帶動下進行轉向、行進及耕作等活動。此驅動控制的關鍵點在于需要有能夠提供足夠動力的液壓缸推動傳遞裝置,不足之處在于需要合理考慮流量與所受壓力的不平衡與不穩定性,且能耗較高。
2.2 電力驅動控制
電力驅動裝置的拖拉機可以有效降低能耗,加入驅動傳感元件,通過檢測不同程度信號信息,輸出不同流量及承受壓力的驅動力;但是,該驅動控制在執行過程中存在僵硬現象,應將兩者有效結合,對液壓系統進行合理的元件選型和結構緊湊的設計組裝,通過電力控制,對需要控制的關鍵參數實現精度化調整作業。
2.3 聯合驅動控制
拖拉機控制系統的液壓驅動與電力驅動各有利弊,對拖拉機控制系統的液壓驅動與電力驅動主要技術參數進行對比(見表1),包括牽引裝置、減速系統及電力驅動源等,主要對轉速、功率及容量進行合理匹配。通過掌握其控制驅動原理及關鍵參數在實際田間作業的變化規律,在拖拉機驅動控制系統中加入逆變器進行相關數據采集。在液壓裝備完善的基礎上,利用高靈敏的傳感器裝置,為達到拖拉機控制系統在整個驅動作業的過程中具備實時調整參數的目標,并應用PID算法(見圖2)進行驅動控制的自適應調節,實現電力驅動與液壓驅動的聯合控制目標,充分考慮拖拉機啟動、正常行駛及突發故障下的運行狀態,進一步融入將兩者有效銜接、形成自適應調節的控制閉環,即
(1)

表1 拖拉機控制系統液壓驅動與電力驅動主要技術參數對比

圖2 應用于拖拉機控制的PID算法簡易原理圖
3 性能試驗分析
3.1 性能試驗
拖拉機控制系統性能的高低由多項因素影響并體現,因此提出多參數的優化模型,簡要列出其控制算法為
ηT=ηm·ηf·ηδ
φ=φmax(1-e-δ/δ*)
Fq=φZq
Zq=λGg
u=u0(1-δ)
(2)
同時,設置轉矩、轉速、傳動比等參數約束條件為
拖拉機控制系統在執行牽引驅動作業的過程中,克服各項阻力,包括機體自身與外部土壤條件等,不斷利用電力與液壓之間的有效結合,從比例、積分、微分3個環節實時調控,縮小測定值與所需目標值之間的差距,實現拖拉機調速、牽引及驅動等環節工作裝置效率發揮最大化,耗能最小化,
圖3為此次性能試驗的驅動特性分析流程圖。在此試驗分析環節,重點考慮滑動旋轉率、驅動力的大小、 驅動效率等之間的關系, 將驅動轉矩與驅動轉速同時進行驅動特性分析。
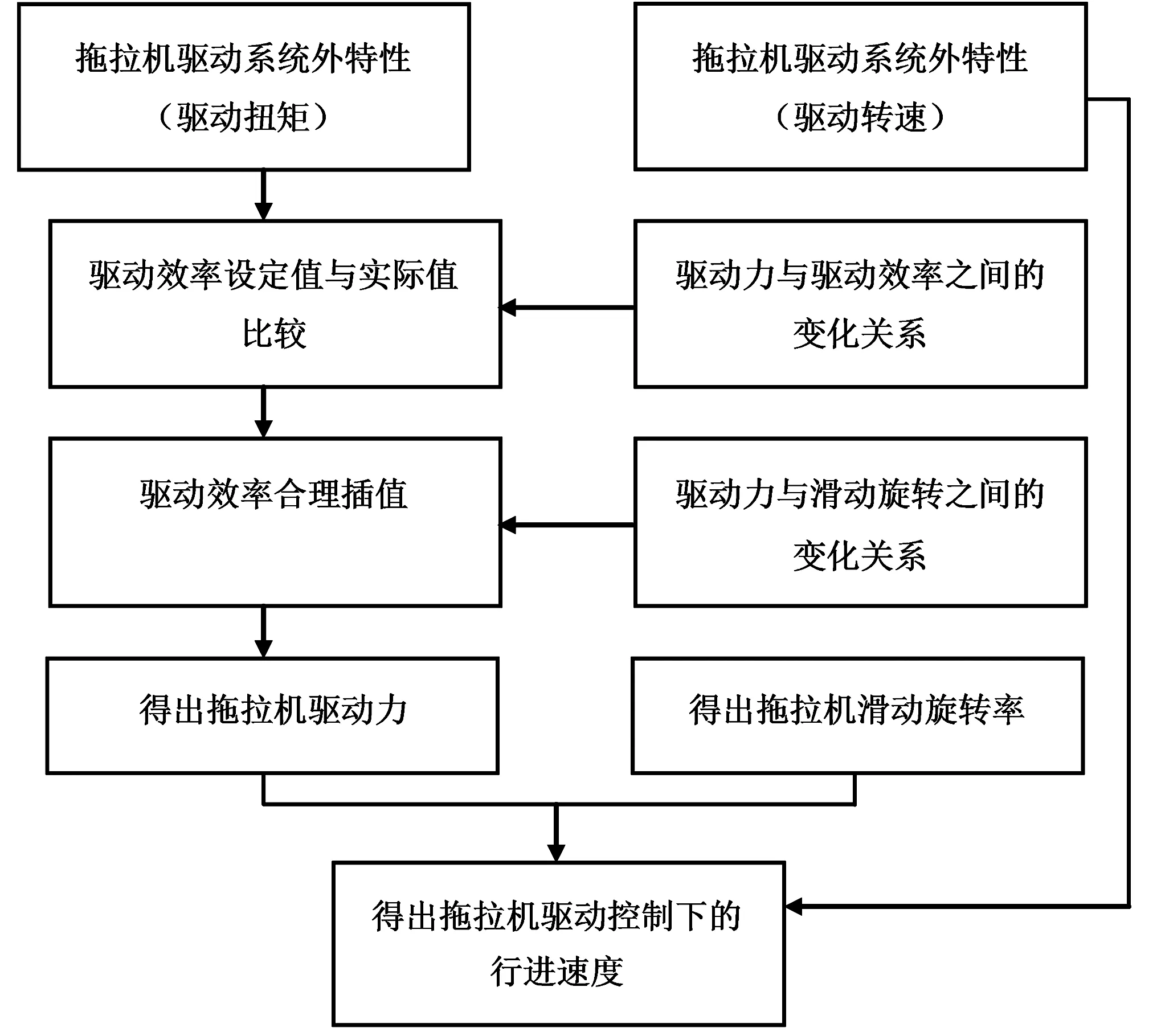
圖3 拖拉機驅動特性分析流程圖
圖4為此次性能試驗融入CVT技術的控制流程。在保留拖拉機驅動系統液壓控制的結構優點條件下,優化傳感電力控制裝置,并進行準確測試記錄。
試驗過程中,要充分考慮實際工況的復雜性與不可預測性,因而加入控制系統克服阻尼及慣性的驅動裝置動態模型,即
τcαr+Kαr=α
(3)
3.2 對比分析
選取將兩種驅動控制系統同時融合在一起的拖拉機進行試驗,主要包括智能儀表、先進傳感監控即電液共同驅動裝置等。性能測試主要實物裝置如圖5所示。
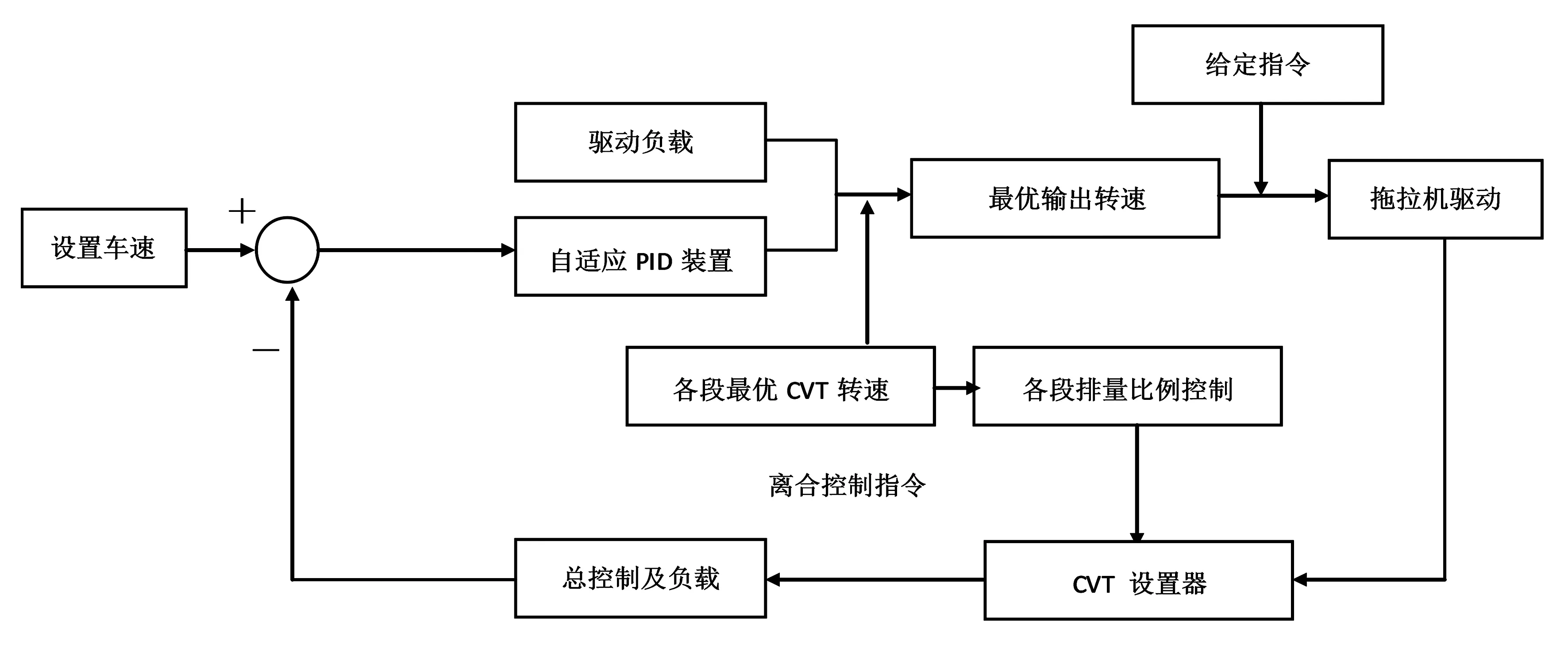
圖4 拖拉機CVT控制流程簡圖

1.試驗拖拉機 2.智能儀表 3.傳感裝置 4.電力驅動裝置
借助于軟件對試驗結果進行統計分析,結果表明:在液壓控制驅動與電力控制驅動之下的拖拉機存在作業性能差異,且電力驅動較前者更為合適,可在底盤構造、檔位變換、控制變速等方面取得良好的效果。通過分析,可以得到拖拉機控制系統的速度、牽引驅動力等多項作業性能指標,表明性能分析方法適應于拖拉機驅動控制。
通過對控制系統影響的關鍵因素提取并做多參數優化處理(主要提取的參數有拖拉機試驗行進速度的調速范圍、拖拉機在各個行進速度之下的牽引驅動力大小),找出在車速、驅動力及控制效能之間存在一定的連續跟隨變化關系,進一步應用CVT技術,并將液壓驅動與電力驅動有效銜接,得到優化前后控制效能可以提高約50%以上,性能試驗可行。
拖拉機驅動優化前、后控制效能,如圖6和圖7所示。
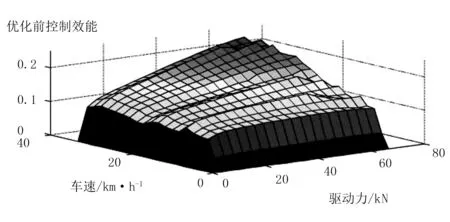
圖6 拖拉機驅動優化前控制效能

圖7 拖拉機驅動優化后控制效能
4 結論
1)在液壓驅動控制與電力驅動控制原理基礎上,對轉速、轉向、轉矩及核心自調節控制算法進行優化組合試驗及仿真,得出最佳綜合性能的拖拉機聯合驅動控制系統。
2)電液驅動裝置之間性能利用與協調配合,可有效保證控制系統的穩定性與時效精準性使拖拉機整體工作性能得到提升,控制效能大大增進。本研究對發揮拖拉機工作的最大效率有重要參考價值,亦可為拖拉機控制系統的軟硬件配置或其他類似農機裝備深入研究與組合優化提供一定的思路和方向。
AbstractID:1003-188X(2018)09-0238-EA
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
現代企業(2015年2期)2015-02-28 18:45:09
