基于農業(yè)采摘的機械臂結構設計研究
2018-08-10 11:00:32蒲筠果王志剛
農機化研究 2018年9期
蒲筠果,王志剛 ,朱 良
(邢臺職業(yè)技術學院,河北 邢臺 054035)
0 引言
農業(yè)采摘的機械臂是一個各構件聯(lián)系緊密的運動執(zhí)行部件,其采摘性能的高低決定農業(yè)采摘的效率,因其可替代人工采摘,促進采摘智能化發(fā)展。隨著機械采摘作業(yè)向精準、高效發(fā)展,農業(yè)采摘機械手中不斷地滲入先進的控制技術,對農業(yè)采摘機械臂的動作水平要求也日益嚴格。為此,在先進電機伺服控制、準確反饋調節(jié)運動軌跡的前提下,為達到較為滿意的自動避障及快速采摘目標,筆者從改善機械臂的本身結構參數(shù)、結構組合角度入手,對機械臂結構的模塊化設計、增減自由度情況下的運動進行分析,并采用可適應性的試驗環(huán)境進行驗證性仿真模擬,以期望達到機械手臂良好的自動作業(yè)效果。
1 理論模型
農業(yè)采摘的機械手理論模型建立在機械構件自由度選取及構成理論基礎上,可從機械動力學機構設計的角度進行結構優(yōu)化。其機械臂運動簡圖如圖1所示。其中,一套完整的機械臂組成應當包括腰部、肩部、大小臂、肘部、腕部等關節(jié);末端抓手配置反映靈敏的識別、傳輸、轉換、動作及輸出等控制裝置。機械臂在進行采摘作業(yè)運動的過程中,著重考慮保證位姿的準確定位及位置補償?shù)淖钚』`差,并對各關節(jié)進行零點設置。從機械動力學原理出發(fā),其理論模型可建立為

(1)
式中M(q)—機械臂運動慣性矩陣;


G(q)—機械臂的重力向量;
T—機械臂承受驅動扭矩。

圖1 農業(yè)采摘機械臂簡圖
建立位姿空間坐標并得出機械臂運動方位相對于運動角度的矩陣方程,即
進一步針對運動矩陣R建立機械臂的末端執(zhí)行矩陣,即
機械臂節(jié)點運動前后示意圖如圖2所示;其控制系統(tǒng)結構如圖3所示。
機械臂在空間、位姿等運動模型控制之下,形成其硬件與軟件控制系統(tǒng)結構(見圖3),機械臂硬件結構及軟件系統(tǒng)需相互配合。其中,裝置的優(yōu)化包括信號處理與反饋環(huán)節(jié),精確及時地感應與機械臂各個關節(jié)的動作指令可實現(xiàn)預定采摘作業(yè)。

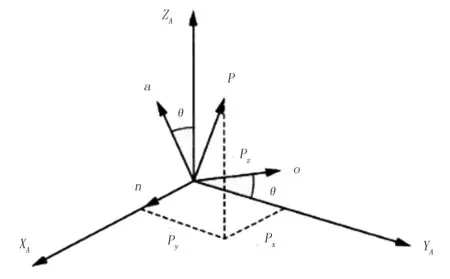
圖2 機械臂節(jié)點運動前后示意圖

圖3 農業(yè)采摘機械臂控制結構系統(tǒng)圖
2 結構設計
2.1 關鍵參數(shù)設定
進行機械臂的結構參數(shù)設定,主要是建立各個關節(jié)間的自由度聯(lián)系,確定旋轉角度和變化范圍,根據(jù)圖4所示的角度算法流程,進行運動跟蹤及軌跡監(jiān)測,自由度的多少可以適當增減進行參數(shù)化設計,可選取在自由度5~7之間。
首先確定機械臂的類型及自由度,給出各個關節(jié)的形狀與尺寸,并通過對機械臂各項性能指標參數(shù)進行對比選取、關鍵數(shù)據(jù)信息采集與處理和關鍵構件成分組成分析,確立是否進行參數(shù)修改,最終得出最佳機械臂各關節(jié)滿足采摘性能的關鍵參數(shù),進行結構優(yōu)化設計。
設定機械臂的運動條件數(shù)x1,機械臂各關節(jié)進行采摘動作的運動可操作性評價值x2,方向可操作性評價值x3,各關節(jié)協(xié)調性動作評價值x4,其它影響度小的綜合評價參數(shù)量x5,將此5個參數(shù)通過標準化轉換、因子載荷測試,進而綜合評定,得出最佳化參數(shù)組合F,即

圖4 機械臂各關節(jié)運動角度流程簡圖
2.2 誤差補償選取
農業(yè)采摘機械手的機械臂在自動采摘作業(yè)時的采摘精度需要一定的誤差補償,主要是為了補償機械臂構造組裝過程中的固有誤差和工作過程中速度傳遞、執(zhí)行定位誤差。因此,針對各關節(jié)在參數(shù)設定的基礎上建立相適應的結構參數(shù)誤差補償模型,主要體現(xiàn)在機械臂的末端抓手上,并使硬件補償與軟件補償相互配合。
降低機械臂的采摘作業(yè)誤差包括各關節(jié)的位姿轉換矩陣、變換及微分計算等,為保證運動的穩(wěn)定與快速,參照實施一種機械臂各關節(jié)綜合誤差模型補償原則,將實際位姿與旋轉運動矩陣合并為綜合末端抓手的誤差,通過系數(shù)修正來達到機械臂末端誤差補償,從而提高運動采摘精度和可靠性。因篇幅有限,只給出補償前后的對比算法,即

2.3 差動轉向技術加入
在機械臂采摘作物或完成后進行返回路徑過程中,加入機械臂關節(jié)的差動轉向技術,可更好地對機械臂運動軌跡實時監(jiān)視和反饋精確化控制。這其中需注重各關節(jié)驅動轉矩的分配設置比例和相關回轉、轉向定位慣性等因素的影響。機械臂的差動轉向控制簡圖如圖5所示。針對各關節(jié),可以采用多冗余的自由度關節(jié)控制,使機械臂采摘動作具有更高的柔韌度與可控可調節(jié)度。轉向的靈活性表現(xiàn)在軟件技術上,如內部構件差動連接進行運動控制,更依賴于關節(jié)本身的結構選取。
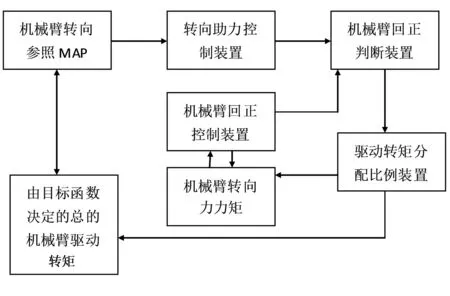
圖5 農業(yè)采摘機械臂差動轉向控制
3 建模仿真分析
進行三維機械臂建模,如圖6所示。同時,對仿真試驗預先設定:①一定的農作物環(huán)境;②農作物采摘對象;③確定一定的機械臂工作空間;④試驗約束條件設置等。
此次機械臂設計優(yōu)化可最大限度減小機械臂的自重,同時進行模擬受力分析,對于機械臂結構材質的選取進行綜合考慮,對于材料的疲勞強度—彎曲極限強度等參數(shù)進行不同程度的施加載荷試驗,針對構件1~10,有側重點進行應力分析,如圖6所示。

1.基座 2、4、6、8、10.安裝電機部位 3、5、7、9.機構連接部位
從圖6中可看出:對機械臂整體的采摘作業(yè)效率快慢影響的主要有構件5與構件7。基于通用的模擬人體手臂采摘的運動機理及各關節(jié)部位出現(xiàn)的相對極值位置點,通過專業(yè)ANSYS分析軟件對設計優(yōu)化后的機械臂進行整體模型的有限元化分析,并對試驗仿真過程中機械臂各關節(jié)進行參數(shù)調整及優(yōu)化,得出機械臂采摘時的最佳運動軌跡和相應的模態(tài)狀況,截取部分構件的分析圖,如圖7所示。
通過對機械臂各個結構參數(shù)進行合理匹配、精細優(yōu)化,具體節(jié)點運動角度及運動參數(shù)如表1所示。選取試驗時間均為6s,記錄機械臂的初始位置與終止位置,其間的運動速度與加速度有效值。由表1可知:在預定的結構優(yōu)化參數(shù)下,整體機械臂進行仿真,各個關節(jié)的協(xié)調性可達90%以上,能夠較好地執(zhí)行采摘動作,上下動作銜接良好,保證了機械臂構造緊湊、動作靈活。
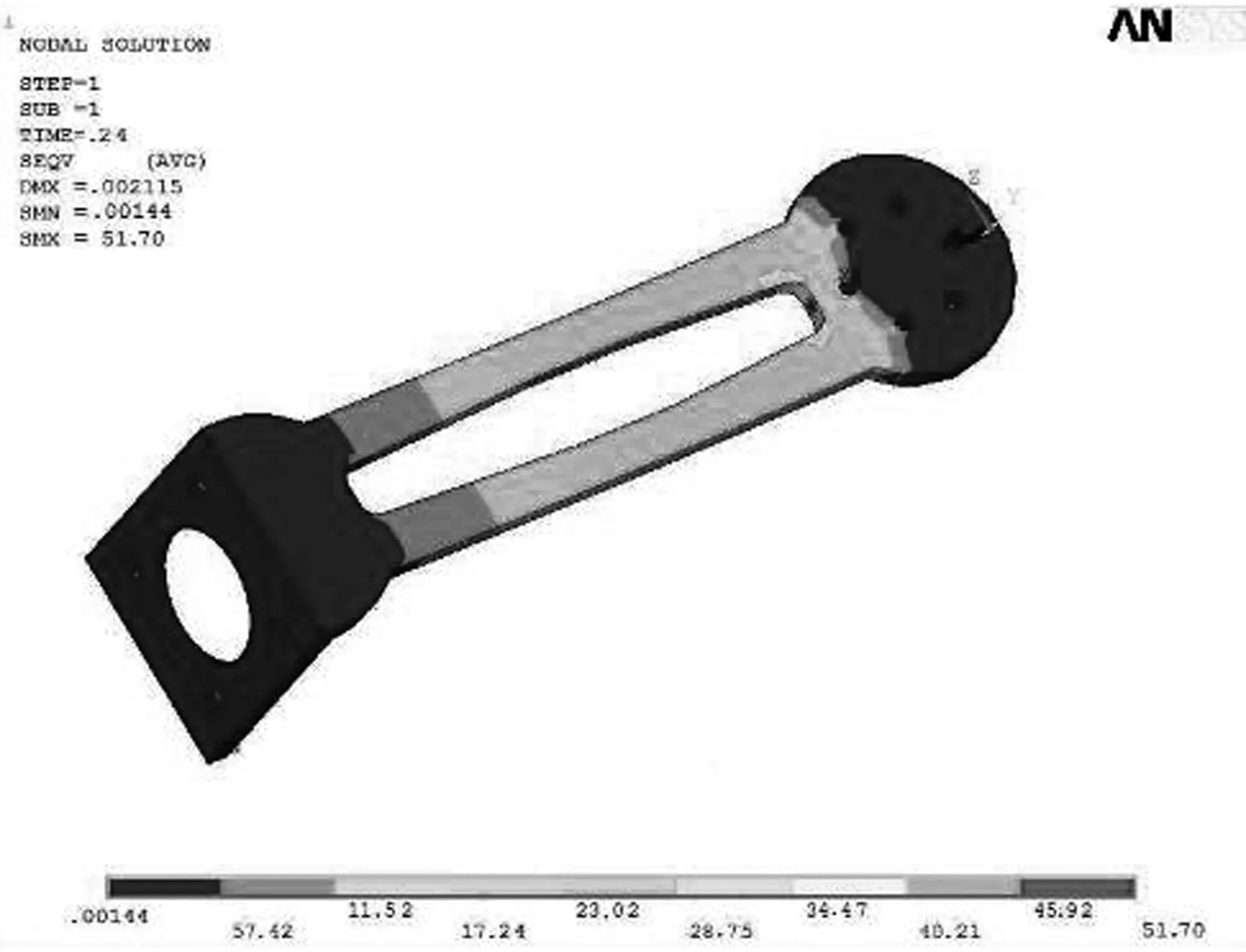

圖7 農業(yè)采摘機械臂關鍵構件應力分布云圖
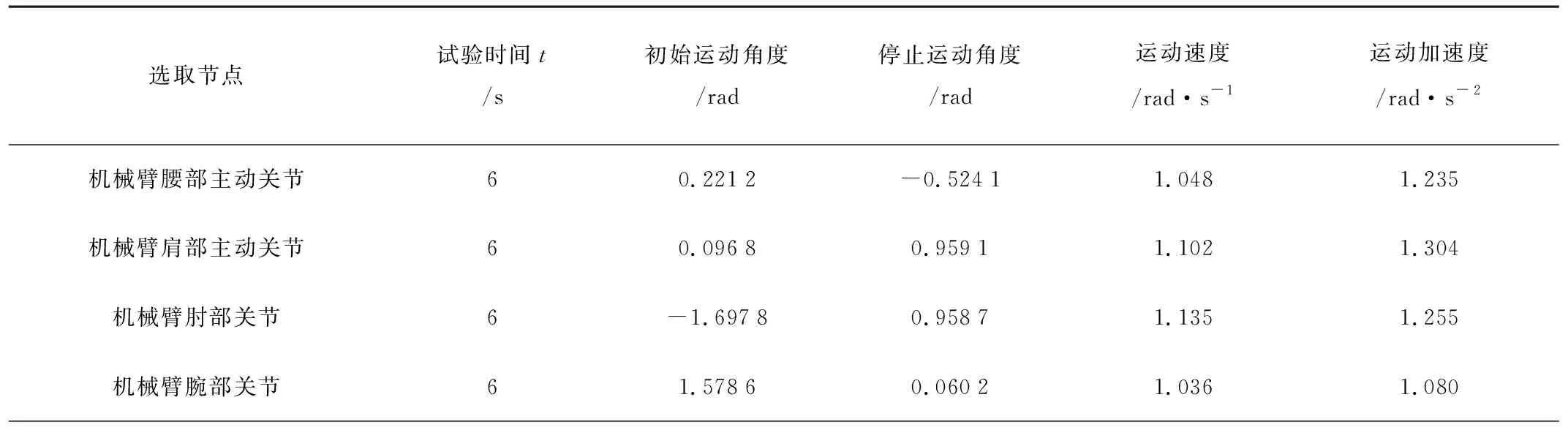
選取節(jié)點試驗時間t/s初始運動角度/rad停止運動角度/rad運動速度/rad·s-1運動加速度/rad·s-2機械臂腰部主動關節(jié)60.2212-0.52411.0481.235機械臂肩部主動關節(jié)60.09680.95911.1021.304機械臂肘部關節(jié)6-1.69780.95871.1351.255機械臂腕部關節(jié)61.57860.06021.0361.080
4 結論
對農業(yè)采摘機械臂的結構進行優(yōu)化設計,從分析其關節(jié)組成出發(fā),在深入了解機械臂采摘動作控制系統(tǒng)的前提下,通過對各關節(jié)進行參數(shù)對比、選擇,形成綜合性評定函數(shù);之后進行動作的誤差補償,以減小機械臂的誤差指數(shù);同時,加入差動轉向控制技術,從而達到更為精準快速控制機械臂回轉、改變路徑的目的。在理論的模型指導下,模擬建立了農業(yè)采摘機械臂三維實體運動模型,獲取了結構參數(shù)優(yōu)化后的應力分布,并得出各關節(jié)相互協(xié)調動作的一致性率。實驗證明了其結構設計的可操作性。同時,此研究思路可為其他農業(yè)采摘機具的改進提供相對的方向維度,并對于農業(yè)采摘的各類機械臂結構優(yōu)化有一定的參考價值,可更好地促進機械臂采摘作業(yè)技術的提高。
猜你喜歡
今日農業(yè)(2022年1期)2022-11-16 21:20:05
今日農業(yè)(2022年3期)2022-11-16 13:13:50
今日農業(yè)(2022年2期)2022-11-16 12:29:47
今日農業(yè)(2021年14期)2021-11-25 23:57:29
當代工人(2020年8期)2020-05-25 09:07:38
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
科技知識動漫(2016年8期)2016-07-29 20:40:09
