智能制造技術在汽車領域的應用
2018-08-03 03:07:52
汽車文摘 2018年8期
隨著科學技術的進步,汽車制造業在新型工業背景下不斷進行改造和升級,智能制造技術在汽車領域得到了越來越廣泛的發展,智能技術產品的應用也將大大推動未來汽車發展的進程。
1 工業4.0背景下的智能制造技術[1]
工業4.0承諾提高制造靈活性,以及實現大規模定制,更好的質量和更高的生產率。智能制造在工業4.0中發揮著重要作用,將傳統資源轉換為智能對象,使其在智能環境中感知并工作。工業4.0旨在創建智能工廠,其中制造技術通過網絡物理系統(CPS)、物聯網(IoT)和云計算進行升級和轉換。在工業4.0時代,制造系統能夠監控物理過程,創建物理世界的所謂“數字雙胞胎”(或“網絡雙胞胎”),并通過與人類的實時通信和合作做出明智的決策。將嵌入式生產系統技術與智能生產流程相結合,為從根本上改變行業價值鏈、生產價值鏈和商業模式的新技術時代鋪平道路。
全面實施智能制造,客戶越來越多的定制需求將增加制造成本,需應用諸如網絡和物聯網、虛擬化和服務技術以及智能對象/資產技術的平臺技術,通過智能設計、生產、物流和供應鏈管理充分利用靈活和可重新配置的制造系統,從而降低成本。多路平臺技術需要一個更開放的創新框架,因此,面向服務的智能制造概念將成為工業4.0的關鍵組成部分。圖1顯示了工業4.0 IMS(Industry Manufacturing System)框架,其中研究主題分為智能設計、智能機器、智能監控、智能控制和智能調度。
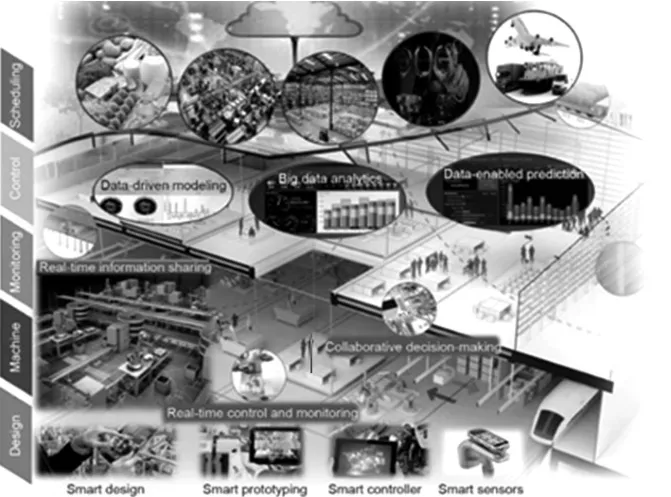
圖1 工業4.0 IMS框架
智能制造在現代工業和經濟發展中變得越來越重要,也將影響傳統汽車制造業的工業轉型,將尖端技術應用于制造和服務中的傳統產品,為各種產品和系統提供附加價值。
2 從傳統的自動化制造系統到整子(Holonic)智能系統[2]
在過去的50年中,自動化制造系統基于計算機集成制造(CIM)技術得到快速發展。CIM模型是為一步開發而設計的功能模型,但由于制造系統的環境極不穩定,商業市場的需求轉變需要過程控制系統的全面轉換,現有CIM系統的轉換和擴展很困難,并且在異常情況下性能會顯著下降,強烈分層和集中的系統通常具有剛性互連,導致通信渠道不靈活。因此,具有更快反應和適應技術,更靈活的操作和分布式結構的系統才能滿足現有需求。
2.1 整子智能系統(Holonic Intelligent System)
整子智能系統(HIS)又稱分布式智能系統。系統是完全分散的,所有單元都具有某種形式的智能,不需要中央處理單元。如圖2和圖3所示,系統單元(SE)使用定義良好的協議相互通信,這些單元可以直接相互尋址而無需中央處理單元的干預,中央處理單元將傳輸信息并包含用于系統操作的算法。這些算法根據任務(分布式智能)分布在各個單元中。SE具有自治性、協作性,用于轉換、傳輸、存儲和處理信息,系統的自主性確保所有智能單元能夠運行,直到其本身或相鄰單元決定它無法操作。該算法運用系統組決策而不是類似點的決策,故系統傳感形式是區域的,而不是點狀的。
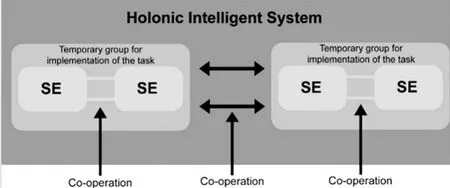
圖2 執行任務的臨時組示意圖

圖3 內部功能分類
2.2 結論
考慮到本文中提到的相關研究成果,整子智能系統是替代傳統集中型自動化制造系統的最合適的技術。該系統運用到汽車制造中,實現人機一體化科學管理,不會由于系統的復雜性而影響生產效率,對制造業的發展起著重要推動作用。
3 車聯網的智能技術運用[3]
社會車聯網(SIoV)是車載領域應用物聯網(SIoT)的概念,通過增強現有的VANET(Vehicular Ad-hoc Networks,車載自組網絡)技術的發展,徹底改變了現有的智能交通系統(ITS)。文中介紹了一種基于Restful Web技術的可擴展的SIoV架構,強調Web技術的重要性,以滿足所需的互操作性并支持眾多組合式服務。
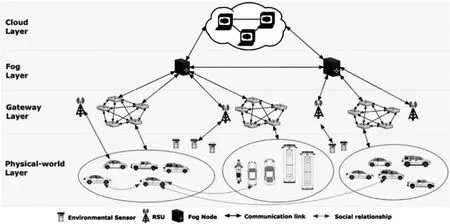
圖4 SIoV的整體架構示意圖
如圖4所示,SIoV有物理世界層、網關層、霧層、云層四個部分,其中包括應用程序、用戶、安全隱私、信任管理以及關系管理系統。
物理世界層處理車輛、環境傳感器、駕駛員、乘客和行人等物理對象。核心功能是通過安裝在車輛中的傳感器以及駕駛員和乘客攜帶的設備來感測數據。網關層負責為物理世界層提供面向基于云的基礎架構的門戶。該層收集物理世界數據并將其傳遞給霧層。所有數據都通過車載網絡使用藍牙、BLE或Wi-Fi傳送到智能車輛模塊。智能車輛的特殊模塊具有必要的通信協議棧,允許它們直接與霧層通信。另一方面,沒有直接向霧層發送數據的傳統車輛和環境傳感器使用RSU或附近的智能車輛模塊來完成。其中,云層利用云技術提供集中式后端服務,由高性能服務器和存儲器來執行復雜的計算、存儲大量數據并制定系統范圍決策的位置,動態地調度和管理其資源以響應所設計的策略和系統的當前趨勢。霧層由許多霧節點組成,可以是邊緣路由器、智能手機和各種其他計算系統。通過在SIoV中提供基于霧的分散式架構,該層在確保所需的可擴展性方面發揮著至關重要的作用。
此外,所提出的SIoV架構可擴展集成并與名稱數據網絡(NDN)、信息中心網絡(ICN)、軟件定義網絡(SDN)和網絡功能虛擬化(NFV)協同使用。
4 新興車輛通信技術的智能應用[4]
新興通信技術在智能交通系統(ITS)領域開辟了新的管理可能性,特別是車輛到基礎設施(V2I)和車輛到車輛(V2V)通信的技術應用。
在主動交通管理領域,配備車載通信系統的車輛能夠與基礎設施和其他車輛交換信息。本文提出了一種利用智能車輛通信能力且名為“合作合并助手”(CoopMA)的新型合并輔助策略,其控制需要在主要行車道上配備有裝備的車輛,以便為交通信號燈釋放的入口匝道車輛創造合并空隙,減少合并車輛對交通流量的干擾,實現V2I通信的智能車輛的合并輔助功能。
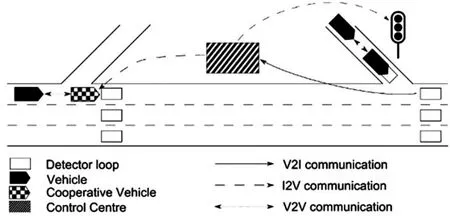
Fig.3.Representation of the communication request by the Cooperative MA system.The control centre estimates the traffic conditions on the on-ramp and main carriageway,releases the on-ramp vehicles using the traffic signal and slows down the cooperative vehicle on the main carriageway.
文中Fig.3中,CoopMA系統需要V2I和I2V信息交換,分別實現入口匝道和主要行車道車輛向控制中心提供交通狀況信息、控制中心釋放入站匝道車輛并使合作車輛周期性地減速。控制中心估計入口匝道和主要行車道的交通狀況,使用交通信號釋放入站匝道車輛,并減慢主要行車道上的合作車輛的速度。
由于以間接的方式實現,車輛到車輛(V2V)通信不是必需的。除了合作車輛和交通燈釋放的第一輛車(均由CoopMA算法直接控制),其他車輛的運動受到正常車輛遵守規則的限制。因此,雖然任何類型的V2V通信都可以改善系統,但不需要V2V通信。從必要通信的描述中可以清楚地看出,CoopMA需要適度的先進技術,每個交通燈周期只需要一個智能車輛,由CoopMA計算的可以在間隙中合并的最大車輛數量可以由傳統的RM控制策略用作確定目標入口匝道流量的進一步約束。
在不久的將來,交通將由裝備和未裝備的車輛組成,并且應該開發在這個過渡時期可用的管理系統。智能通信技術的創造和應用在汽車領域將得到更廣泛的發展。
5 智能運輸系統(ITS)中車載傳感器的應用[5]
近年來,車載自組網絡(VANETs)吸引了業界和學術研究界的興趣,是未來加強運輸安全和保障的最有效途徑。智能傳感器則將在系統中發揮至關重要的作用。本文設計、開發并實施了一種具有自主恢復程序的車載傳感器診斷分析解決方案。基于人工智能技術用于監測、報告和自動恢復的車輛傳感器,其算法不僅確定傳感器的操作狀態,還執行自主恢復的程序。
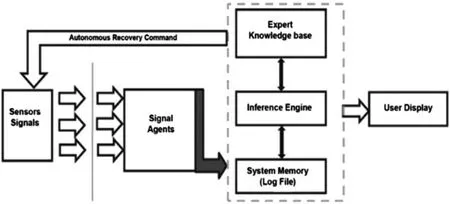
Fig.2.Proposed architecture of diagnosis expert system
Fig.2中系統包括以下六個部分:
1)用戶顯示:指示特定傳感器的狀態以獲取駕駛員信息。在出現故障的情況下,系統執行傳感器數據的分析,向駕駛員顯示狀態,恢復命令自動給予傳感器。
2)專家知識庫:從人類技術專家、專業書籍、技術手冊和各種其他來源收集的信息以規則的形式保存的領域。
3)推理引擎:當任何傳感器發生任何類型的故障時,推理引擎使用知識庫分析存儲在系統存儲器中的數據,并根據知識推斷規則是否滿足。
4)系統內存:存儲從信號代理應用程序接收的數據或存儲日志文件。
5)信號代理:讀取傳感器信號的軟件應用程序。日志文件中的傳感器數據直接傳送到主軟件應用程序以進行決策。
6)傳感器:為了安全起見,使用全球定位系統(GPS)、發動機和防撞雷達設計系統。
傳感器的智能制造技術的發展豐富了智能車輛領域所需的控制策略,同時,通過具有車載自組織網絡的路邊單元連接的車輛可以提供更好的安全系統。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32