基于模型修正的特殊行車狀態下橋梁動態響應研究
2018-07-25 03:26:48龍關旭高貴杰黃平明
山東農業大學學報(自然科學版) 2018年4期
龍關旭,高貴杰,馮 宇,黃平明
長安大學公路學院,陜西 西安 710064
現行的荷載試驗規程中規定,橋梁動載試驗宜首選無障礙行車,而有障礙行車和制動試驗并不是必須項[1],但在橋梁實際運營過程中,由于橋面不平整度、橋面雜物等原因產生的車輛跳車現象時有發生,而且隨著交通量的增大,橋上駕駛環境的愈加復雜,車輛緊急制動問題也逐漸被學者們所關注。
對于車輛過橋產生的動力響應研究,最初多集中在車輛勻速行駛方面[2-4],而針對特殊行車狀態下的研究相對較少,例如跳車、剎車、加速行駛等,且存在計算模型簡單、參數分析不足等問題[5]。鄧露[6]基于三維車橋振動模型研究了汽車制動對橋梁的沖擊作用,結果發現車輛制動下產生的沖擊系數明顯大于勻速行駛狀態。蒲軍平[7]考慮了車輪處的摩擦力與剎車制動力共同作用,對車橋耦合振動現象進行了數值模擬。陳斌[8]針對懸索橋采用7自由度平面分析模型,研究了行車速度,橋面不平順,剎車制動三種因素影響下的動力響應。
基于目前研究狀況,綜合考慮橋梁模型的準確性與實橋驗證,本文以許塘橋為依托,對橋梁初始模型進行模型修正,得到反映橋梁真實狀態的有限元模型,并對跳車試驗和剎車試驗進行模擬與實測,進而對特殊行車狀態下的橋梁動態響應展開研究。
1 有限元模型修正方法及流程
在橋梁結構的分析過程中,按照設計圖紙來建立橋梁有限元模型,但這樣建立的有限元模型往往不能反映實際結構的真實狀態,這就需要對建立的有限元模型進行修正。本文采用基于敏感度的參數型修正方法,首先根據設計參數建立初始有限元模型,其次基于敏感分析確定需要修正的參數,并根據現場實測值和理論值的誤差來構建目標函數,最后利用ANSYS進行零階優化迭代直至收斂而得到最優解[9],具體流程圖如圖1所示。
2 有限元模型修正
2.1 橋梁概況及初始有限元模型建立
以浙江省長興縣許塘橋為工程實例,該橋采用單跨下承式混凝土系桿拱結構,單跨71.96 m,計算跨徑70 m,橋面寬度為9.3 m,橋面凈寬為7.0 m,雙向兩車道。該橋設計荷載為公路-Ⅱ級,計算矢跨比為1/6,橋梁立面圖如圖2所示。
根據橋梁原設計圖紙、結構特點及橋梁結構現狀,并考慮荷載加載位置和有限元模型修正的實現及目的,采用有限元模型ANSYS對該橋建立初始有限元模型,如圖3所示。其中拱圈、系梁、吊桿,橫梁及虛擬縱梁均采用beam44梁單元進行模擬,全橋共劃分557個節點,850個單元。材料的初始質量密度為2420 kg/m3,彈性模量取3.45×1010Pa。

圖2 許塘橋立面圖Fig.2 Elevation of Xutang bridge
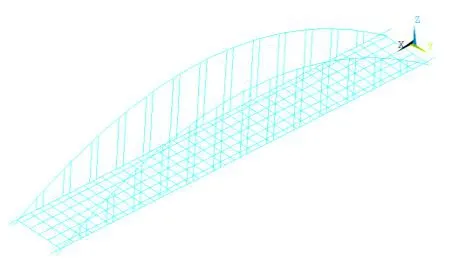
圖3 許塘橋初始有限元模型Fig.3 Initial finite element model of Xutang bridge
2.2 現場試驗
對許塘橋的固有振動特性進行了現場測試,試驗通過加速度傳感器拾取大橋各測點的環境振動響應,測試結構的固有頻率和振動模態。模態測試縱向布置在八分點截面處,對稱布置14個測點,測試三向(豎向、橫向、扭轉)振動特性。
2.3 有限元模型修正
首先進行設計參數選擇,頻率靈敏度分析結果見圖4,給出了豎向前三階(V1、V2、V3)、橫向前三階(H1、H2、H3)和扭轉前兩階(T1、T2)頻率靈敏度變化,各參數對結構動力特性均有不同程度的影響,故選定系梁彈性模量Et、拱肋彈性模量Er、吊桿彈性模量Es、橫梁彈性模量Ec、系梁質量密度Dt、拱肋質量密度Dr、吊桿質量密度Ds、橫梁質量密度Dc作為模型修正參數。
根據設計的有關資料和各個參數靈敏度的分析,設定修正參數的范圍,修正范圍主要以初始值的±10%~±20%控制,在本算例中,基于動力測試數據進行有限元模型修正,采用關于聯合頻率和模態相關性系數MAC構造目標函數,見式(1)。

式中fd是基于頻率的目標函數,fMAC為基于MAC的目標函數,αj和βj是權重系數,反映了特征值和MAC相關函數之間的不同的比重,本橋系數均定義為1。nd為模態階數,faj和ftj是第j階理論和試驗的頻率,MACj表示第j階的模態保證準則值,表示第j階試驗和理論振型的相關程度。
圖5給出了采用零階優化算法的優化迭代過程,從圖中可以看出優化迭代初始階段目標函數值浮動跳躍較大,第19次后目標函數值基本趨于平穩,可視為函數已收斂,獲得了最優解。
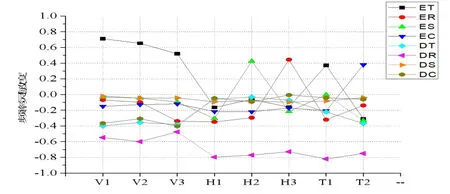
圖4 參數靈敏度分析Fig.4 Parameter sensitivity analysis
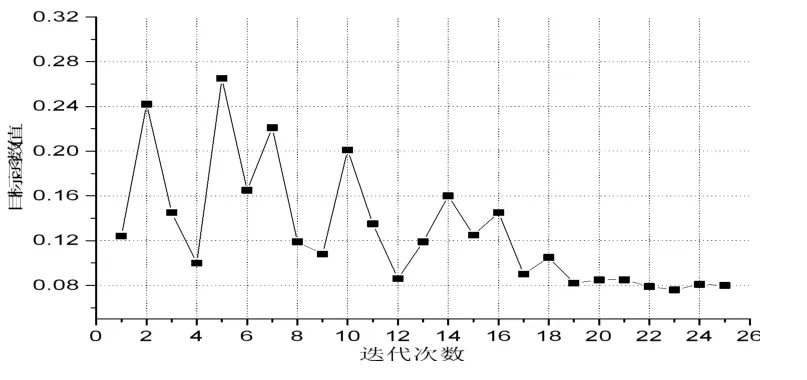
圖5 優化迭代過程Fig.5 Optimizing iterative process
模型修正前后,許塘橋動力特性對比詳見表1,可以看出修正后的橋梁頻率與實際測得的頻率更為接近,MAC也得到了有效的提升。
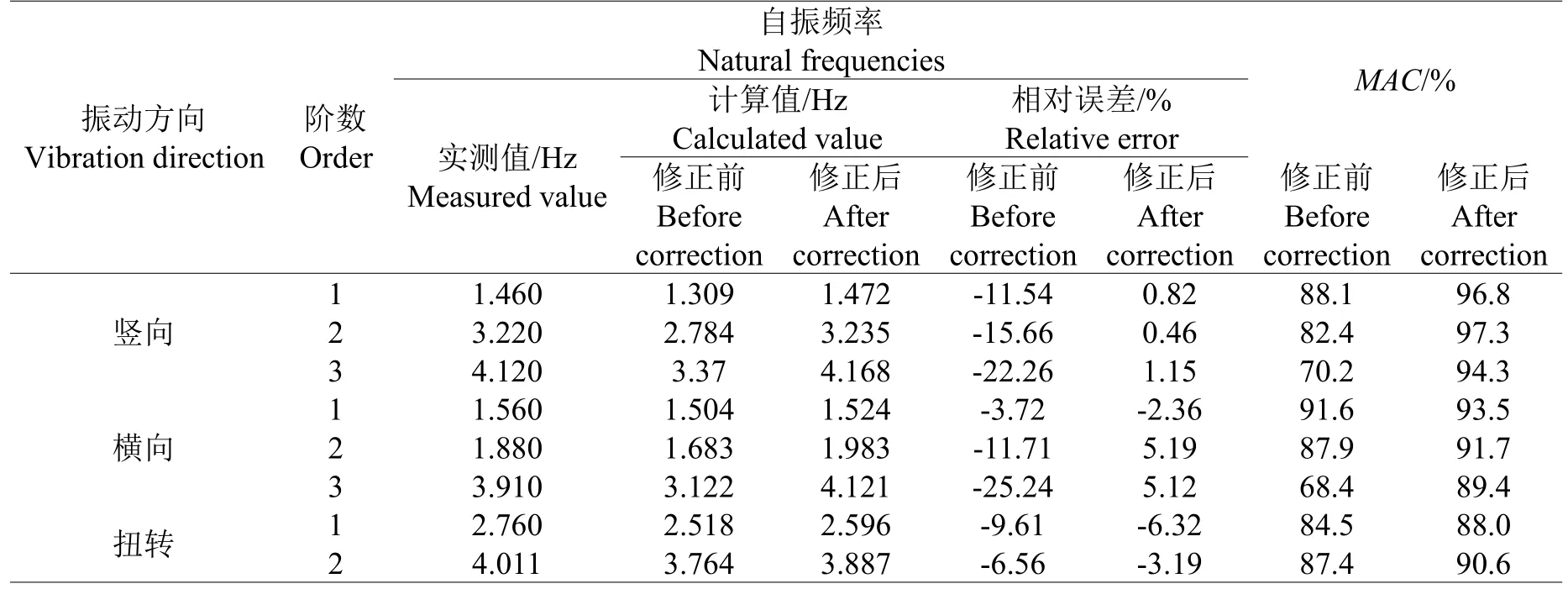
表1 有限元模型修正前后自振特性對比Table1 Comparison of natural vibration characteristics before and after finite element model modification
3 特殊行車狀態下橋梁動態響應
3.1 現場動載試驗
通過前文的有限元模型修正,獲得了能夠反映結構真實狀態的基準有限元模型。基于修正后的模型,對許塘橋進行了動載試驗,包括無障礙跑車、跳車和剎車試驗,測試結構的動力響應并進行驗證。選擇跨中截面作為動應變測試截面,測點布置在系梁上,同時在跨中橋面布置DH610三向加速度傳感器,用以拾取特殊行車狀態下加速度信號。
3.2 跳車試驗
跳車試驗在橋面跨中位置放置半弓形障礙物,高度分別選用5 cm、7 cm和10 cm,采用30 t三軸(雙后軸)汽車作為試驗車輛,以0 km/h(原地跳車)、10 km/h、15 km/h和20 km/h的速度行駛過障礙物,采集跨中位置動力響應。
針對跳車試驗,主要關注橋梁豎向振動特性。以5 cm高的障礙物0 km/h原地跳車為例,豎向加速度隨時間變化如圖6所示,基本能看出試驗車輛三個輪軸過障礙物產生沖擊的現象。圖7給出了不同速度、不同障礙物高度的豎向加速度極值變化趨勢,可以看出除個別點跳躍點外,隨著障礙物高度的增大和車速的增大,豎向加速度極值整體呈現變大的趨勢。
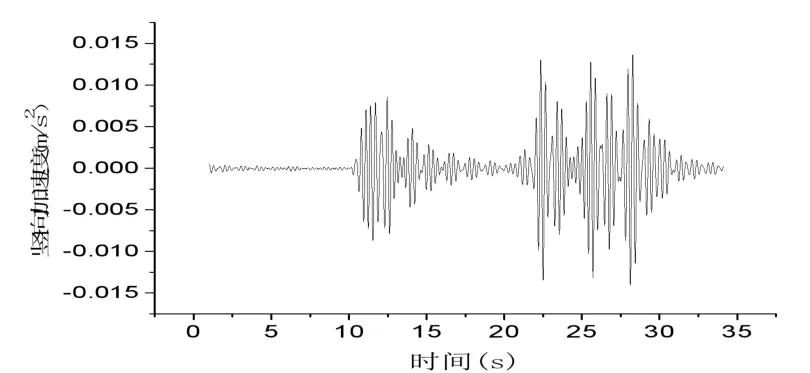
圖6 跳車試驗豎向加速度曲線Fig.6 Vertical acceleration curve of bumping test
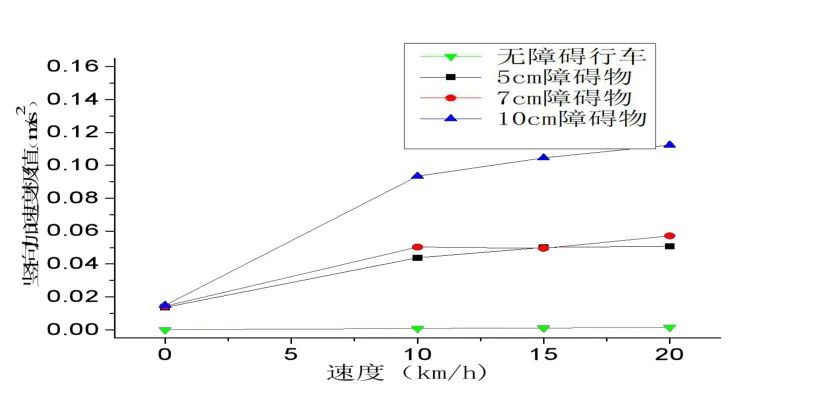
圖7 豎向加速度極值變化Fig.7 Vertical acceleration extrema variation
根據實驗過程中測得的動應變數據,對橋梁沖擊系數進行計算,詳見表2,從表中可以看出相比于無障礙行車,跳車情況下橋梁沖擊系數明顯增大,可以達到1.80以上。
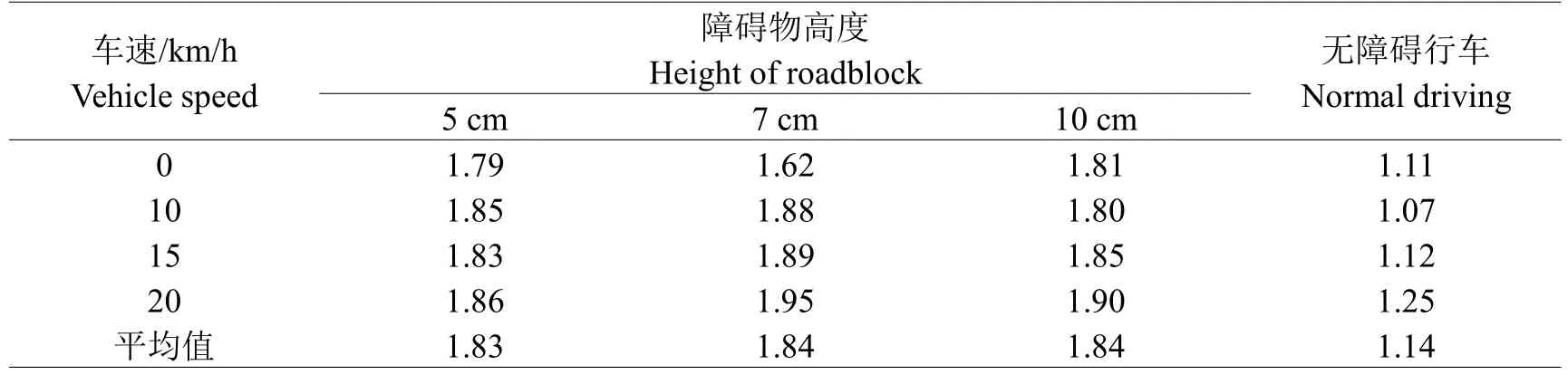
表2 不同工況下沖擊系數Table 2 Impact coefficient under different conditions
3.3 剎車試驗
剎車試驗將模擬前方出現交通事故情況,車輛發生緊急制動。采用與跳車試驗相同的30 t三軸(雙后軸)加載車,控制的主要參數有:(1)剎車初始速度:10 km/h~40 km/h(以10 km/h為一個間隔);(2)剎車位置:L/4、L/2、3L/4。由于現場控制剎車加速度難度較大,因此通過控制剎車距離來控制剎車減速度大約在3.5 m/s2,并使用手持式速度儀核對剎車初始速度。
針對剎車試驗主要研究橋梁縱向振動特性。以30 km/h速度跨中剎車工況舉例,圖8給出了主梁跨中縱向應變的時程變化曲線,可以看出隨著車輛的駛入縱向應變逐漸增大,在16 s左右時達到最大值,相比于正常跑車,縱向應變有一個明顯的突變現象,極大值增加約20%左右,可見剎車對結構縱向響應有明顯影響。圖9為主梁跨中縱向加速度時程曲線,理論值和實測值變化趨勢基本一致,理論值結果偏大。
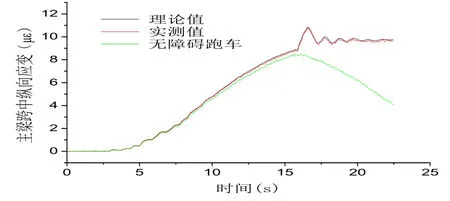
圖8 剎車試驗縱向應變曲線Fig.8 Longitudinal strain curve in braking test
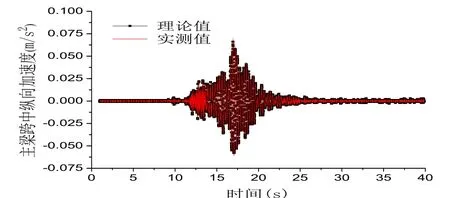
圖9 縱向加速度曲線Fig.9 Longitudinal acceleration curve
圖10和圖11分別對不同速度下,不同剎車位置橋梁響應的進行了對比。由圖10可看出,主梁縱向加速度極值隨車速的增加而變大,且L/2處和3L/4處剎車響應較為接近,L/4處剎車橋梁響應增大趨勢明顯,梁端縱向位移隨車速也呈現出相同的規律。
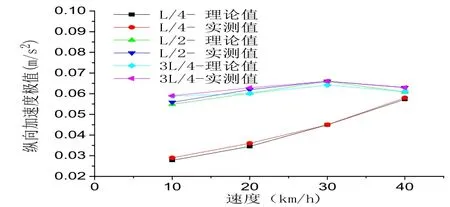
圖10 縱向加速度極值變化Fig.10 Extreme changes of the longitudinal accelerations
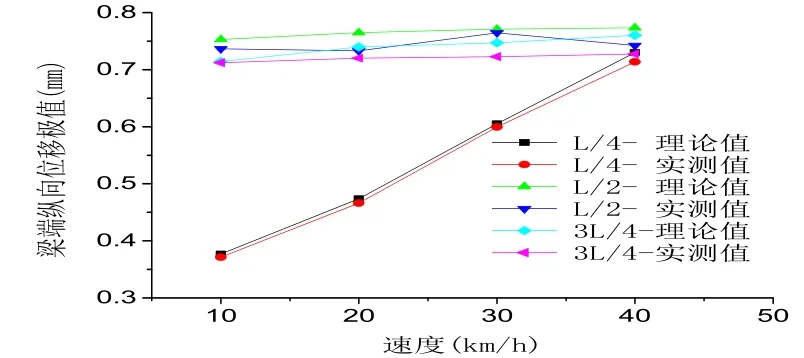
圖11 縱向位移極值變化Fig.11 Extreme changes of the longitudinal displacements
4 結 論
本文利用模型修正獲得了橋梁基準有限元模型,并通過跳車和剎車試驗采集主要動力參數,將實測數據與理論數據對比分析,得出以下主要結論:
(1)經過模型修正后的基準有限元模型與初始模型相比,其動力特性與實測數據吻合度更好;
(2)跳車工況下,跨中加速度峰值隨著障礙物高度和行車速度的增加而變大,且沖擊系數達到1.84左右;
(3)剎車工況下,實測與理論跨中動應變和縱向加速度時程變化趨勢基本一致,隨著車速的增加縱向加速度極值和梁端縱向位移極值也逐漸增大,且L/2和3/4處剎車動力響應明顯大于L/4處,說明車輛在橋梁后半段剎車能引起更大的縱向響應。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
山東工業技術(2016年15期)2016-12-01 05:31:04
光學精密工程(2016年6期)2016-11-07 09:07:19
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18