股骨干骨折復位機器人主從控制系統的設計
2018-07-18 09:39:20史剛朱世磊張自啟李釗劉淼祁富貴王鵬飛殷悅李雪陽焦騰
中國醫療設備 2018年7期
史剛,朱世磊,張自啟,李釗,劉淼,祁富貴,王鵬飛,殷悅,李雪陽,焦騰
1.第四軍醫大學 軍事生物醫學工程學系,陜西 西安 710032;2.解放軍第五醫院 醫學工程科,寧夏 銀川 750004
引言
股骨干骨折是臨床上骨科常見骨折之一,據文獻報道,在所有的股骨骨折中股骨干骨折占比達36.27%[1]。股骨是人體最長的骨骼,承擔著下肢最主要的負重,股骨干骨折恢復不良極易引起患者長期功能障礙甚至是殘疾[2]。股骨干骨折的治療一般分為骨折復位和固定兩步,其中復位的準確與否直接影響股骨干骨折的治療效果。傳統的骨折復位治療是由醫生徒手或借助手動牽引裝置牽引骨折遠端,使之與骨折近端發生相對分離,然后在透視結果的指導下調整骨折遠端姿態進行對位對線復位。一方面,醫生在復位過程中對骨折遠端的偏移量和旋轉角度無法進行量化控制,只能手動調整,費時費力,復位精度低,穩定性差,復位狀態維持困難。有文獻統計顯示,采用閉合復位加髓內釘固定手術治療的病例中在圖像的冠狀面和矢狀面上發生對位不良的情況約占2%~18%[3],發生超過10°的旋轉,畸形的發生率更是高達40%[4];另一方面,術中需多次進行透視[5],醫生受輻射的時間普遍在158~316 s[6],有很高的健康風險,對于長期接觸放射線的創傷科醫生來說已經形成了一種心理障礙[7]。
③發揮項目的支撐引領作用,以流域綜合治理項目協調推進和諧的人水關系;以大中型灌區續建配套與節水改造項目重點推進農業節水;以國家級河西走廊高效節水農業示范區項目全面推進農業節水;以以色列貸款高效農業節水項目示范提高農業節水的可持續性;以循環經濟示范區建設推動工業節水;以酒鋼集團、金川公司等大型工業企業的節水節能降耗推動區域工業節水目標實現。
本研究著眼臨床需求,結合手術機器人操作精確、靈活穩定、抗輻射、可實現微創化、數字化和智能化等優勢[8],充分發揮生物醫學工程專業特長,與西京醫院創傷骨科合作,研究設計出一款六自由度、復位力量大、操作精度高、抗輻射、數字化的股骨干骨折復位機器人。旨在降低醫務人員手術強度和輻射風險、提高復位精度和穩定性,為股骨干骨折治療提供精確、穩定、微創、低輻射的數字化治療方式。
1 股骨干骨折復位機器人總體設計
本研究設計的股骨干骨折復位機器人工作流程為:首先由手術人員將患者的骨折近端和遠端通過剛性的外架與復位機器人的左右從機械臂建立剛性連接固定,此時,左右從機械臂會穩定的保持骨折遠端和近端的相對位置;然后,手術人員控制C型臂進行透視,并通過上位機查看分析透視所得圖像,了解骨折兩端的相對位置關系后,操作左右兩個主操作手柄帶動從機械臂進行快速粗略復位動作,粗略復位結束后再次進行透視,根據透析結果進一步通過上位機發送控制指令完成精確復位。與此同時,極限位置檢測反饋模塊在整個過程中實時檢測機械臂的運行狀態,當機械臂移動到極限位置時,核心控制芯片會立刻屏蔽相關的指令,并通過RS-232串口將此狀態發送給上位機,上位機顯示出對應的警告信息,避免給患者和設備造成額外損傷。在整個操作過程中,當主操作手柄無有效指令輸出時,從機械臂會穩定地保持在上一條有效指令執行結束的狀態,避免了復位關系的丟失,可節約手術時間,減少透視次數。
主操作手柄控制從機械臂的具體過程為:手柄指令通過RS422串行通信接口傳輸給嵌入式微控制器,微控制器處理指令后將設置好的脈寬調制(PWM)信號和方向信號分別通過PWM模塊和IO模塊輸出,為了提高信號的抗干擾能力和可靠性,核心控制芯片發出的信號經由差分放大芯片轉化為差分信號后長距離傳輸給從機械臂的伺服驅動系統,實現主操作手柄對從機械臂的主從式精確控制。
血常規是臨床上最基本及廉價易行的檢驗項目,主要檢測白細胞、紅細胞、血小板及血紅蛋白等血液有形成分的質和量及形態變化。血液參與機體的代謝及每一項功能活動,在保證機體的新陳代謝、功能調節及人體內外環境平衡等方面發揮重要作用[3]。血液中的任何成分發生病理變化,都會影響全身的組織器官。反之,組織或器官的病變也可引起血液成分發生變化[4]。因此,血液學分析對了解疾病的嚴重程度有很大的幫助。本研究對膿毒癥患者的血常規指標進行了動態觀察,Logistic回歸分析顯示血小板數量減少是膿毒癥患者死亡的獨立預測因素。
本研究所設計的股骨干骨折復位機器人整體框圖,見圖1,圖中虛線框內所包含的部分為股骨干骨折復位機械人的主從控制系統。本文將從控制電路設計、控制程序設計和軟硬件聯調3個方面重點介紹主從控制系統的設計和實驗工作。
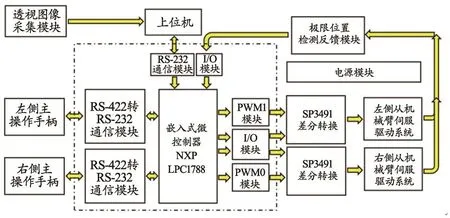
圖1 股骨干骨折復位機器人整體框圖
2 控制電路設計
控制電路是主從控制系統的載體,電路的抗干擾能力、穩定性直接影響控制系統的運行狀態,是整個控制系統的核心。
電路設計平臺:主從控制系統的電路原理圖設計選用Altium Designer開發軟件,該軟件把原理圖設計、電路仿真、PCB繪制編輯、拓撲邏輯自動布線、信號完整性分析和設計輸出等技術完美地融合,操作方便,易于上手。
此程序主要功能是對通過篩選的指令進行解析、控制IO引腳輸出方向信號、并設置相關的標志參數供脈寬調制程序調用。
肅南裕固族傳統體育富有濃郁的民族風情和獨具地方特色的文化現象,它不僅有著高度的技術性,而且又與不同藝術形式相結合,伴以歌,載以舞,既增強體質又益于身心。肅南裕固族傳統體育是裕固族傳統節日的主要活動內容,它已經成為少數民族吉祥、興旺、繁榮、幸福的象征。[8]
主從控制系統的電路連接示意圖,見圖2。選用該芯片的P0_0、P0_1、P0_2、P0_3、P2_8、P2_9這6個引腳對應的UART0/2/3三個串行通信口分別與上位機、左、右主操作手柄進行通信。選用PWM0和PWM1兩組通用脈寬調制輸出端口和P0_24-P0_31這8個IO引腳分別輸出8路PWM控制信號和8路方向信號,經差分轉換后傳輸給伺服驅動系統,實現對復位桿的精確控制。選用P0_8-P0_23這16個IO引腳控制8路伺服系統運動方向指示燈,用于指示伺服電機的轉動方向。選用P1_16-P1_31這16個IO引腳實時監測極限位置光耦電平狀態。其中串口0經SPX3232進行電平轉換后通過RS-232接口與上位機通信,主要完成機械臂狀態信息的反饋和精確控制指令接收功能。串口2和串口3經SP3491進行電平轉換后通過RS-422接口分別與左、右主操作手柄連接,接收手柄發出的特定格式的數據幀指令。此外通過引腳P5_1和P5_2控制左右兩個主操作手柄指令的輸入使能狀態。
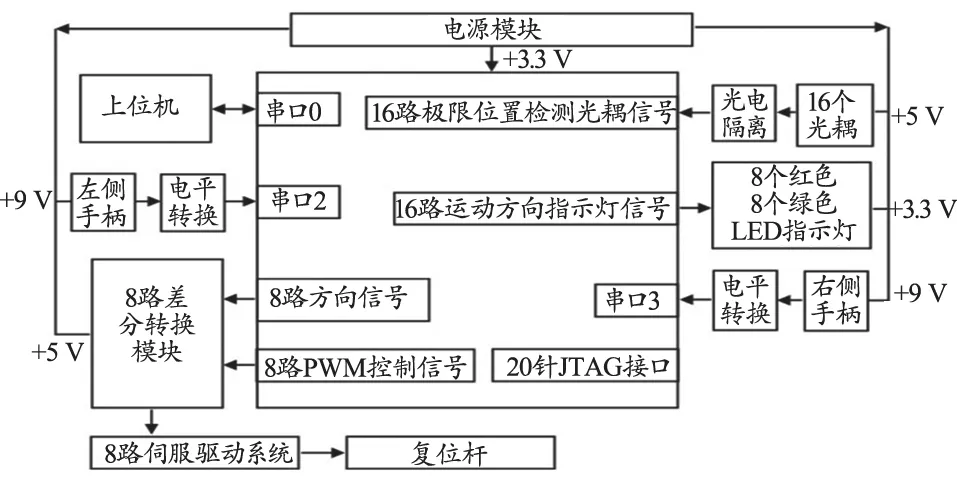
圖2 控制電路連接示意圖
3 控制程序設計
由于手柄是第三方生產的通用產品,所以在指令解析前需要明確手柄各種操作對應的臨床控制意義,清晰全面的約定是指令解析的重要依據。本設計根據臨床上復位步驟及動作特點,對指令的意義做出如下約定:首先建立參考坐標系,見圖4a~b。
3.1 手柄數據幀接收程序
此程序主要功能是對手柄發來的指令數據進行接收和篩選。在接收數據之前必須了解操作手柄的預設置和輸出指令的編碼規則。本設計中使用的GBC-109型雙軸霍爾控制手柄的設置及指令編碼規則如下:
手柄上電后每間隔10 ms將手柄的狀態信息寫入長度為6個字節的數據幀內,并通過RS-422串行口發出,通信波特率為9600 bps,傳輸協議約定為起始位1位,數據位8位,停止位1位,無奇偶校驗。6個字節的數據幀格式約定為前兩個字節為幀頭,最后一個字節為校驗位,中間三個字節分別是按鍵開關狀態字、X軸和Y軸的位置狀態字。其中按鍵開關狀態字是1字節無符號整數,表示手柄開關狀態的具體內容,編碼規則為當某個或幾個按鈕被按下時,該按鈕對應字節中的位會被置1,具體詳見表1。X軸位置狀態字是1字節無符號整數,表示手柄在左右方向的偏移位置,偏向最左側時為0,居中(自動復位)位置時為128,偏向最右側時為255,用十六進制數表示為0X00~0X80~0XFF。Y軸位置狀態字也是1字節無符號整數,表示手柄在上下方向的偏移位置,編碼格式與X軸相同。
在脈寬調制輸出程序中對輸出條件應嚴加判斷,必須避免錯誤的信號輸出,在程序設計中設置多個狀態標識位,其中一位表示當前按鍵狀態字是否有效,第二位表示當前手柄是否發生左右偏移,第三位表示當前各極限位置監測引腳是否有高電平輸入,當且僅當三個狀態標識位都為允許輸出狀態時方可打開PWM輸出功能。
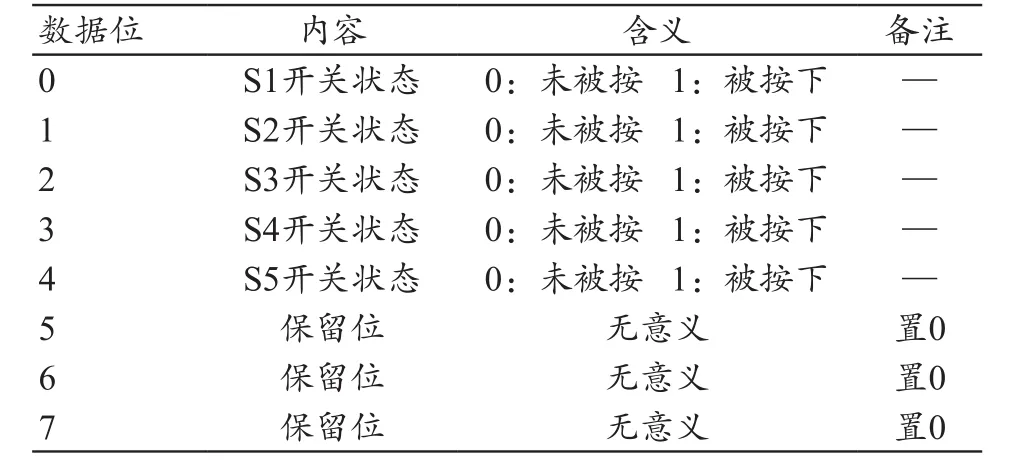
表1 按鍵開關狀態字具體內容定義
程序初始化過程中完成對接收串口的波特率和數據位格式的設置,串口準備就緒后啟動串口收發功能,當串口接收到數據后首先存放在16個字節的串口接收緩沖器中,當緩沖器溢出或者接收超時時,觸發串口接收中斷。此時在中斷響應程序中單個字節地讀取并處理,串口接收緩沖器是一個先進先出隊列(First Input First Output,FIFO),每次讀取的字節為當前狀態最早接收的字節,這樣保證了發收循序的一致性。由于數據在傳輸過程中受各種因素影響可能發生錯誤,為了篩選丟棄錯誤的數據,接收程序在讀取到符合數據幀格式的6字節的數據后,首選進行校驗驗證。如果校驗正確,則將按鍵開關狀態字、X和Y軸位置狀態字存入預先定義的數組,傳給指令解析程序做進一步處理。如果校驗結果錯誤則舍棄該幀數據,清空數組,重新讀取一幀數據進行校驗。具體流程,見圖3。
3.2 指令解析程序
電源設置:由于主操作手柄需要9 V供電,故主從控制系統選用9 V直流輸入,一路直接給兩個主操作手柄供電,另一路經SPX1117進行電壓轉換,輸出5 V和3.3 V兩個電平用于電路中核心控制芯片和其他模塊的電源供應。
此程序主要功能是根據解析程序傳入的通道、速度參數,在相應引腳輸出頻率受控的PWM脈沖。脈沖信號傳輸給機械臂伺服驅動系統,最終表現為復位機械手臂的操作桿做出不同的復位動作。
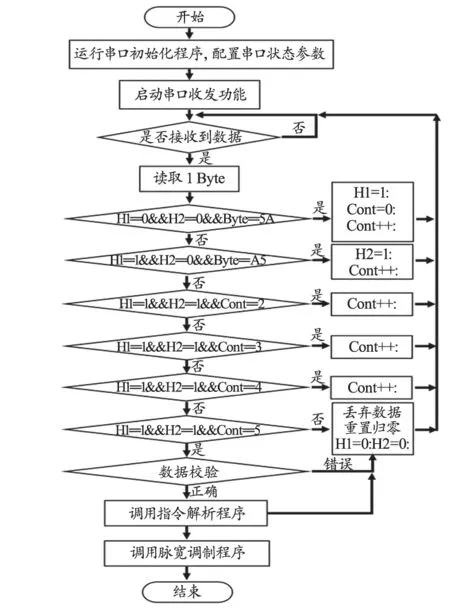
圖3 手柄指令接收程序流程圖
控制程序是主從控制系統的靈魂,科學合理地設計控制程序,能保證系統穩定性、提高系統運行效率、降低系統功耗。下面主要介紹手柄數據幀接收程序、指令解析程序、脈寬調制輸出程序的功能和設計流程。
核心器件選擇:本控制系統電路以嵌入式器件NXP系列的LPC1788微控制器為核心,它是基于ARM Cortex-M3的微控制器,用于處理要求高集成度和低功耗的嵌入式應用。外設組件擁有512 kB的Flash存儲器、96 kB的數據存儲器、4個UART、一個8通道12位ADC、4個通用定時器、兩個6輸出的通用PWM、一個窗口式看門狗定時器等諸多資源,適用于醫療系統的應用場合。
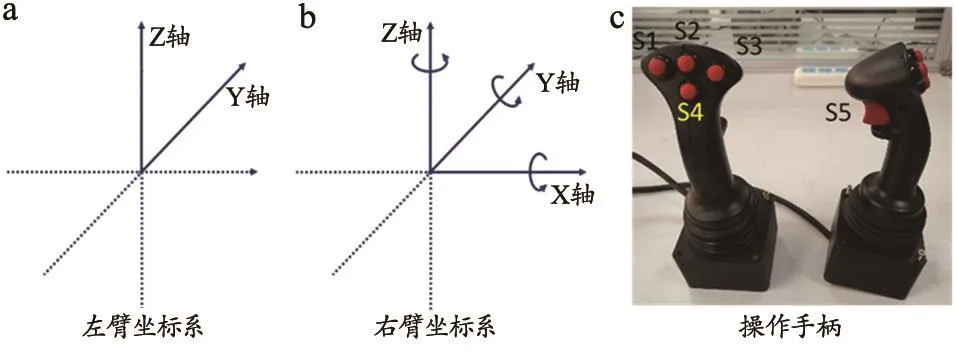
圖4 復位機器人左右機械臂的參考坐標系和主操作手柄
本設計中復位機器人的左臂只設置了Y軸和Z軸,可控制末端操作桿分別沿Y、Z軸前進或者后退,右臂設置了X、Y、Z三個軸,可控制末端操作桿分別沿三個軸前進后退或著正反向旋轉。其中旋轉的正反方向定義參考右手螺旋法則,即用右手握住旋轉的中心軸,大拇指指向該軸的正方向,其余四指自然彎曲,此時其余四指所指方向為正方向。由于右臂運動控制比左臂復雜,此處以右臂為主進行介紹,左臂參考右臂即可。考慮到雙軸手柄在偏移過程中很難控制僅左右偏移或僅上下偏移,為了保證指令的準確性,只定義手柄左右偏移有效,忽略其上下偏移。右側操作手柄的S1、S2、S3三個按鈕分別對應X、Y、Z三個軸,當其中某個按鈕被單獨按下時,該按鈕對應的軸被選中,此時手柄左右偏移即可控制右臂的操作桿在該軸方向上前進或后退;當S5被按下,同時S1、S2、S3三個按鈕中某個按鈕被按下,此時手柄左右偏移即可控制右臂的操作桿圍繞選中的軸進行正向或反向的旋轉。此外,從安全操作的角度出發,為了有效識別手術人員誤碰操作手柄等情況,約定在手術人員在操作前和操作結束后同時按下S4和S5按鍵,第一次按鍵為屏蔽手柄輸入,第二次按鍵為解除屏蔽。具體控制關系,見表2。左臂控制對應參考右臂控制關系中狀態2和狀態3即可。
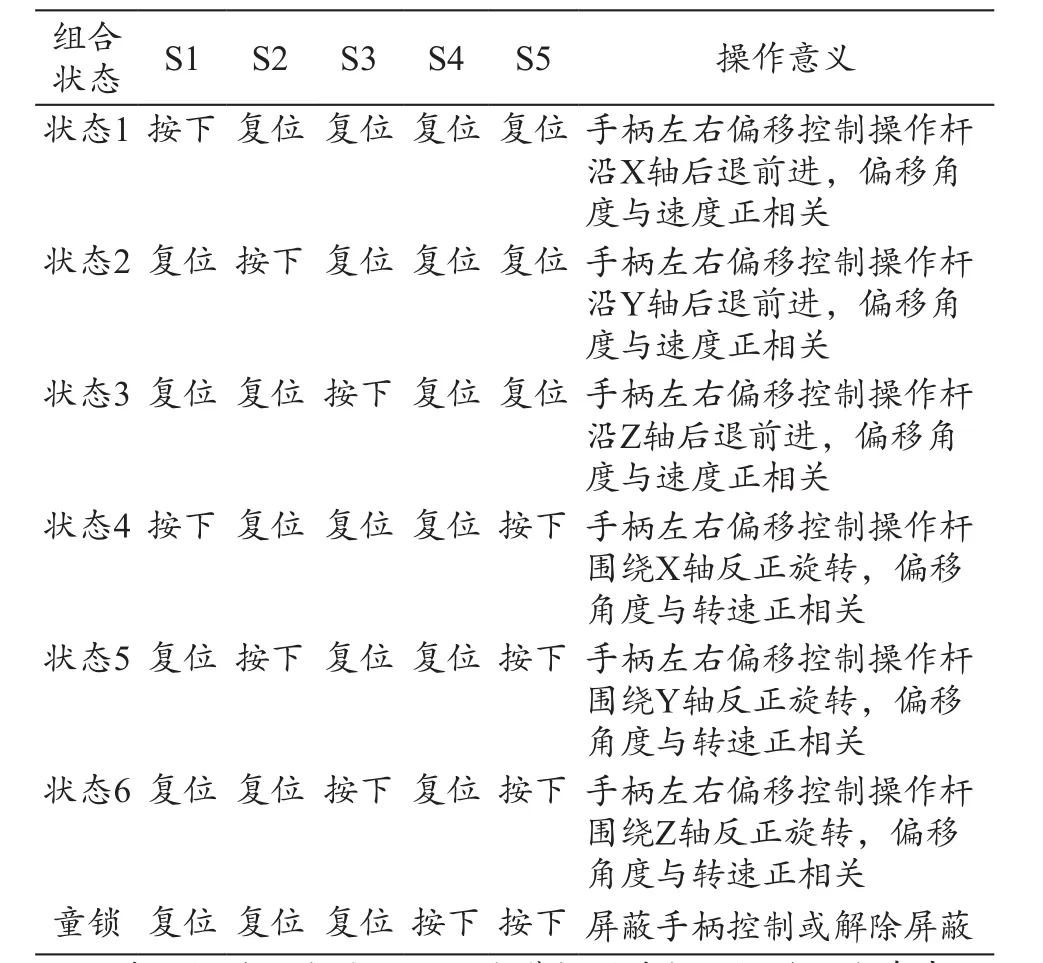
表2 按鍵組合與手柄控制對應表
當有通過篩選的指令數據傳入時,解析程序根據約定的規則解析指令數據,首先判斷按鍵狀態字是否為零,是零或者按鍵狀態字無效則直接結束程序,如按鍵狀態字為0X18,即S4、S5同時被按下時,則查詢手柄屏蔽狀態,如已屏蔽則解除屏蔽標志,如未屏蔽則設置屏蔽標志。只有當按鍵狀態字有效且屏蔽標志未設置時才進入按鍵狀態分類,根據不同的按鍵設置不同的輸出通道。其次,判斷手柄左右偏移位置狀態字,根據手柄左右偏移情況設置方向標志位,根據手柄左右偏移角度大小設置輸出脈沖波形的頻率,設置完成后調用PWM程序控制相關引腳輸出符合指令的電平或者脈沖。如果手柄沒有偏移,則關閉PWM輸出,具體流程圖,見圖5。
3.3 脈寬調制輸出程序
美軍網絡空間司令部在組建之初,并沒有立即組建直屬作戰力量,而是在各軍種成立網絡空間司令部,將各軍種已有的通信、網絡、信息作戰力量納入軍種網絡空間司令部架構下;再根據需要,專門進行論證并組建網絡作戰分隊,由各軍種結合各自特點和作戰任務承建,網絡空間司令部負責統一指揮;已經建成的133支網絡空間任務部隊分屬各軍種,其中,陸軍41支、海軍40支、空軍39支、海軍陸戰隊13支,這些力量構成了美軍網絡空間作戰力量的主體,在網絡空間司令部的統一籌劃和指揮下遂行作戰任務。
一是成為評價和判斷事物水平高低、性質優劣的標準。實踐主體的動作、語言等具備技巧、技能等而被視作水平高、優秀。如《淮南子》:“故以巧斗力者,始于陽,常卒于陰。”[14](P1009)因此,“巧”發展成“靈巧”義。
四、水稻栽插及甲魚投放。水稻種植應用機插秧或人工插秧,秧苗株距和行距比不養甲魚的田塊略大些。插秧時間為6月中旬,插秧15天后即可投放甲魚,選擇連續晴天投放甲魚,當氣溫上升至28~30℃,可與甲魚苗種場聯系,進行甲魚適溫調節,投放甲魚規格在400~500g為宜,這種規格的甲魚適應性強、成活率高、生長迅速。甲魚運輸要選擇空調箱式貨車,每框裝20~30只,雌雄要分開投放,養殖密度為60~100只/畝,下塘前用聚維酮碘溶液浸泡2~3分鐘消毒,消毒后直接投放入水溝中。
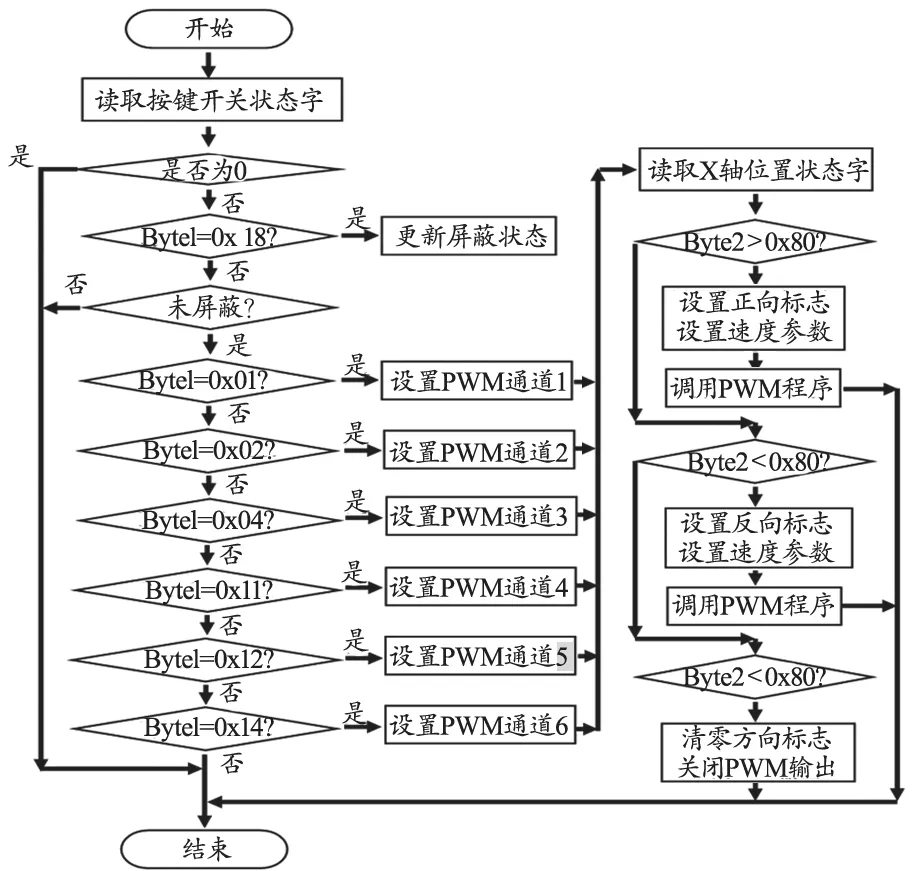
圖5 指令解析程序流程圖
4 實驗結果及分析
硬件平臺搭建準備完成后,使用Keil-μVision 4軟件進行控制程序編寫和調試,運行無誤后,用J-LINK仿真器通過20針JTAG(Joint Test Action Group)接口寫入LPC1788控制芯片,進行仿真。控制程序仿真運行無誤后,連接操作手柄和串行接收口進行軟硬件聯調。同時用泰克科技公司生產的TPS2024型隔離通道數字存儲示波器監測在控制手柄不同輸入狀態時PWM對應的輸出波形。
實驗過程中首先測試正常輸入狀態下,輸入輸出關系,當手柄上S1按下且分別向左右偏移時,通過串口接收到解析程序的反饋,同時通過數組示波器監測輸出的PWM波形。實驗結果,見圖6~7。
在正常指令解析處理測試完成正后,模仿手術過程中各種錯誤操作方法觀察控制信號的輸出,驗證控制系統的識別錯誤能力和穩定性。首先模擬操作人員在手柄未屏蔽狀態下不小心碰觸手柄,分為只有左右偏移無按鍵、有按鍵按下無左右偏移兩種輸出,控制程序準確識別錯誤輸入,輸出信號無變化。其次模擬操作人員在屏蔽狀態下操作手柄,輸出結果表明,在屏蔽狀態下手柄的任何有效無效輸入均不會產生輸出。最后,操作人員通過按下S4、S5解除屏蔽后,輸入操作指令,輸出結果與預期完全一致。
地方性與裁量性的特點在一定程度上消解了社會救助的權利意味,使得社會救助的給予成為行政機關可以自由選擇的事項,是否對社會救助權進行司法保護便成了社會救助權最終能否得以成立的關鍵因素之一。西方國家的經驗提示我們,社會救助權的司法保護往往受到經濟發展的影響,隨著經濟水平的不斷提高,社會救助權的保障限度也不斷升級,以至于在行政訴訟中出現了先予執行、給付訴訟、規范性文件附帶審查、公益訴訟等配套制度[14]28,相較而言,我國行政訴訟中的社會救助權保護依舊在萌芽階段,一些制度已在規范層面呈現,但其作用有待進一步實踐證明。
實驗結果表明:該控制系統中各模塊運行穩定,控制手柄指令接收程序能準確檢測接收數據的正確性,丟棄錯誤數據,避免由于傳輸誤碼導致的錯誤動作,指令解析程序能準確解析指令的意義,通過串行口輸出給上位機,同時將需要的參數傳給脈寬調制輸出程序,脈寬調制輸出程序可以根據傳入的參數,結合極限位置電平狀態,準確地控制PWM輸出的頻率和時機。
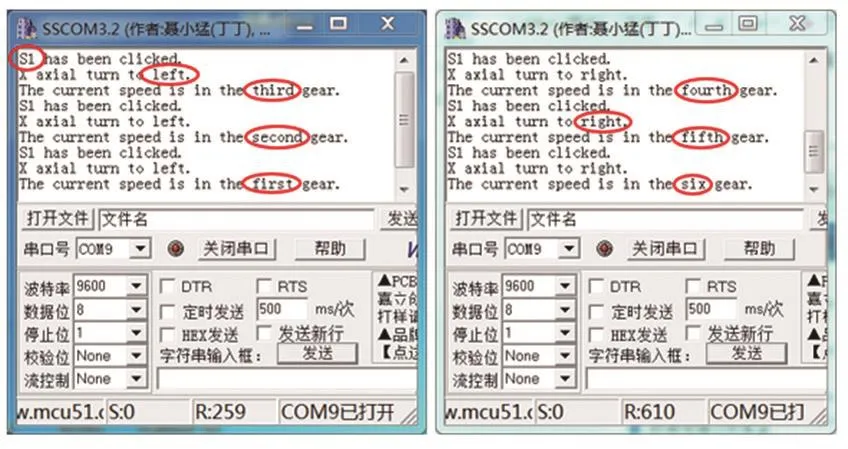
圖6 指令解析程序結果輸出
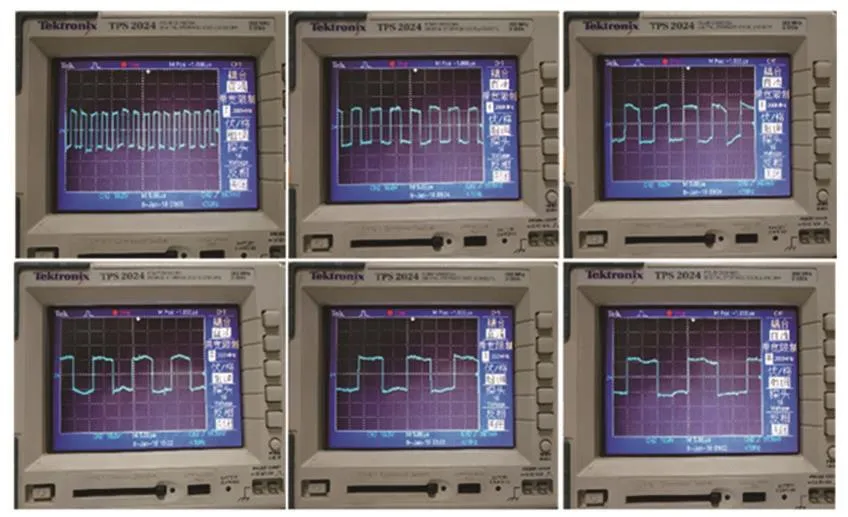
圖7 手柄不同偏轉角度的PWM輸出
5 結語
骨科手術機器人是推動精準、微創骨科手術發展的核心智能化裝備,是骨科手術發展的趨勢,已成為國際研究熱點[9],美國[10]、韓國[11]、加拿大[12]等國家的研究機構都在開展此方面研究,哈爾濱工業大學[13]、北京航空航天大學[14]、東南大學[2]、北京積水潭醫院[15-16]等機構也在不斷進行研究探索。目前骨科機器人仍有很大的發展空間[17],本文設計的股骨干骨折復位機器人控制系統可以根據復位手術的不同需要,提供快速定量粗略復位、精準平穩的精確復位、持久穩定的復位保持和避免誤操作的類童鎖功能,可以準確、安全、可靠的實現主操作手柄對從機械臂的主從控制,借助機械臂的操作可有效減輕手術人員的手術強度,通過數字化指令控制,可實現復位動作的量化,提高復位精確度。此外,通過將控制臺與機械臂分離,可實現操作人員在屏蔽手術室外控制機械臂進行復位,降低手術人員的健康風險。在已經開展的離體牛股骨干骨折復位實驗中,該系統運行平穩,驗證了此系統的可行性,有望為臨床骨科股骨干骨折治療提供新的方法,具有重要的臨床意義。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
人大建設(2019年12期)2019-05-21 02:55:44
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
電信科學(2016年10期)2016-11-23 05:11:56
中國衛生(2015年3期)2015-11-19 02:53:32
西安航空學院學報(2014年5期)2014-07-13 01:27:52