直升機尾槳完全失效后自轉著陸軌跡優化
2018-07-17 07:40:58嚴旭飛陳仁良
北京航空航天大學學報 2018年6期
嚴旭飛,陳仁良
(南京航空航天大學 直升機旋翼動力學國家級重點實驗室,南京210016)
尾槳是常規單旋翼帶尾槳直升機的重要部件,其作用主要是提供側向力,從而產生偏航力矩以平衡旋翼反扭矩。駕駛員可以通過改變尾槳距實現直升機的航向操縱。為了提供足夠的偏航力矩,尾梁一般較長,故操縱系統和傳動系統較長,容易發生各種尾槳故障。20世紀初,國內外就發生了多起由于尾槳故障引起的直升機事故[1]。因此,研究直升機在尾槳故障時的安全著陸軌跡和操縱過程,對直升機的飛行安全具有重大意義。
在尾槳故障中,最嚴重也是最危險的故障就是尾槳完全失效[2-3],即由尾槳傳動軸斷裂或者尾槳碰撞而造成的側力突然消失。此時,尾槳完全失去了作用,旋翼反扭矩無法平衡,直升機向旋翼旋轉的相反方向加速偏轉。在這種情況下,駕駛員應立即關閉發動機,從而停止向旋翼輸出扭矩,防止機身進一步加速偏轉。隨后通過自轉下滑方式著陸,期間倘若處理不當將會導致嚴重的事故。因此,本文重點對直升機尾槳完全失效后自轉著陸的最優軌跡和操縱過程進行研究。
國內外關于尾槳故障后的安全飛行問題已有一定研究。主要包括模擬直升機各類尾槳故障的工程試飛和處理方法[1-3],尾槳受損部件的檢測分析[4-6],新的故障監測方法[7-9],以及直升機尾槳完全失效后的飛行仿真[10-11]。在飛行仿真方面,文獻[10]建立了直升機尾槳完全失效后的6自由度剛體模型,并設計控制系統,讓尾槳完全失效后的直升機重新配平,但沒有研究其自轉著陸過程;文獻[11]設計了控制系統,可以讓尾槳完全失效后的小型無人直升機跟蹤預定軌跡進行自轉著陸,但并未研究其最優自轉著陸過程。可以看出,目前對直升機尾槳完全失效后自轉著陸的研究尚未涉及到最優軌跡和操縱過程的求解。
直升機尾槳完全失效后的最優著陸軌跡和操縱過程問題可以被描述為:在尾槳完全失效后,從允許的尾槳失效后自轉著陸的操縱策略中找出一個最優的操縱策略,使直升機在該操縱策略作用下由初始飛行狀態完成自轉下滑著陸到允許的目標狀態(或范圍)的同時,其評價整個自轉著陸過程品質優劣的性能指標為最優。該問題可以采用最優控制方法進行求解。最優控制方法廣泛應用于直升機發動機失效后軌跡優化的研究,不僅可以得到直升機發動機失效后安全飛行的最優飛行軌跡和操縱[12-16],還能為飛行試驗提供理論依據[17-21]。目前尚未有文獻將該方法應用于研究直升機尾槳完全失效后的最優自轉著陸過程。
因此,本文采用最優控制方法研究直升機尾槳完全失效后的最優自轉著陸軌跡和操縱過程。首先,建立直升機6自由度剛體飛行動力學模型,在模型中加入可以描述尾槳完全失效和自轉著陸階段發動機出軸功率以及旋翼轉速變化的相關方程。在該模型的基礎上,以直升機的狀態量和控制量為優化變量,將直升機尾槳完全失效后的自轉著陸問題轉化為非線性最優控制問題,并采用直接轉換法和序列二次規劃算法進行求解。然后,以某型號單旋翼帶尾槳直升機為樣機,計算前飛狀態下空中停車后的自轉著陸過程,并與飛行試驗數據進行對比,以驗證所建模型和最優控制方法的準確性。最后,計算并分析該型號直升機在以巡航速度下前飛時,尾槳完全失效后自轉著陸的最優軌跡和操縱過程。
1 飛行動力學建模
首先給出常規單旋翼帶尾槳直升機的6自由度剛體飛行動力學模型(建模過程見參考文獻[19])。其狀態量為:體軸系下的速度u、v和w;滾轉、俯仰和偏航角速度p、q和r;滾轉角、俯仰角和偏航角φ、θ和ψ;水平位移、側向位移和高度x、y和h。操縱量為:旋翼槳根總距θ0,縱向周期變距θs,橫向周期變距θc和尾槳總距θt。主控方程如下:

式中:xb為狀態向量;ub為操縱向量;t為時間。
本文假設直升機在尾槳完全失效前處于配平狀態,故可根據主控方程式(1)給出當前飛行條件下穩定飛行時的狀態量和操縱量。
當直升機尾槳完全失效時,尾槳提供的側向力突然消失,此時原飛行動力學模型中由尾槳產生的力(FXTR、FYTR、FZTR)、力矩(MXTR、MYTR、MZTR)和尾槳需用功率PTR均為零,即
駕駛員在發現直升機尾槳完全失效后,應立即將油門關至慢車狀態,從而停止向旋翼輸出扭矩,防止機身進一步加速偏轉。此時發動機出軸功率PA以及旋翼轉速Ω自由度方程可以表示為[20]

式中:tp為發動機響應時間常數;PMR為旋翼需用功率;η為直升機傳動效率因子;IMR為旋翼轉動慣量。
在隨后的自轉著陸過程中,由于尾槳完全失效,駕駛員只能通過操縱旋翼槳根總距θ0,縱向周期變距θs和橫向周期變距θc來使直升機安全著陸。考慮到操縱系統特性對這3個操縱量速度的限制,同時為了避免操縱量出現跳躍或者不連續的控制形式[17],使用操縱量關于時間t的導數u0、us和 uc作為新的控制變量,并把 θ0、θs和 θc作為新的狀態變量,即

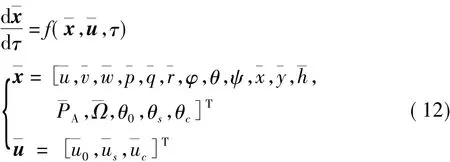
式(1)~式(4)組成了適用于計算直升機尾槳完全失效后軌跡優化的6自由度剛體飛行動力學模型。其狀態空間形式為

式中:狀態量x和控制量u分別為
2 最優控制模型和數值解法
2.1 最優控制模型
直升機尾槳完全失效后的最優安全著陸問題可以歸結為一種含有狀態和控制約束的非線性最優控制問題。最優控制問題一般由優化變量、性能指標、微分方程、邊界條件和路徑約束組成[21]。
1)優化變量
按照最優控制問題描述,優化變量為6自由度剛體飛行動力學模型式(5)中的狀態量x和控制量u,以及自轉著陸初始時刻t0和結束時刻tf。
2)性能指標
尾槳完全失效后自轉著陸的過程中,駕駛員不僅要通過剩余的3個操縱量(θ0、θs和θc)來盡量維持橫航向姿態的穩定,同時還要控制俯仰姿態角、前飛速度和下降率以完成安全著陸。此外,還應該考慮到自轉下滑所需時間、自轉著陸的可操縱性和可實現性等因素,故性能指標J可以定為

式中:
其中:和分別為末端時刻對應的前飛速度和上升速度;u0max、usmax和 ucmax分別為3個控制量的最大值; φmax、θmax和 ψmax分別為允許的最大滾轉角、俯仰角和偏航角;wt、wv和 w1~w6為常數權因子,權重系數越大,對應項越重要。在尾槳完全失效后的自轉著陸過程中,駕駛員主要專注于對總距、縱向周期變距和橫向周期變距的控制,同時盡量保持姿態的穩定[18-20]。因此 u0、us和 uc對應的權重系數w1~w3要大一些。本文算例中采用的權重系數通過大量仿真調試得到,具體數值將在算例中給出。
3)微分方程
采用適用于計算尾槳完全失效后自轉著陸過程的6自由度剛體飛行動力學模型式(5)。
4)邊界條件
①初始邊界條件(t0時刻)
假設直升機在標準大氣條件下尾槳完全失效時處于穩定飛行狀態,根據旋翼飛行器適航條例規定[22],尾槳完全失效后,駕駛員至少延遲1 s開始操縱直升機,因此本文以尾槳完全失效1 s后直升機的飛行狀態作為初始邊界條件(t0=1 s)。為了求得初始邊界條件,需要計算直升機發生尾槳完全失效到駕駛員開始操縱這段時間內的自由響應,即求解操縱量保持不變時,由式(1)和式(2)構成的一階微分方程(此時駕駛員尚未關閉發動機,旋翼保持正常轉速,因此式(3)不發揮作用)。為此,首先對主控方程式(1)進行配平計算得到直升機尾槳完全失效前穩定飛行時的狀態量和操縱量,得到一階微分方程的初值,然后使用向后差分公式算法求解。
②末端邊界條件(tf時刻)
本文根據旋翼飛行器適航條例關于自轉下滑的具體要求確定最優控制模型的末端邊界條件:
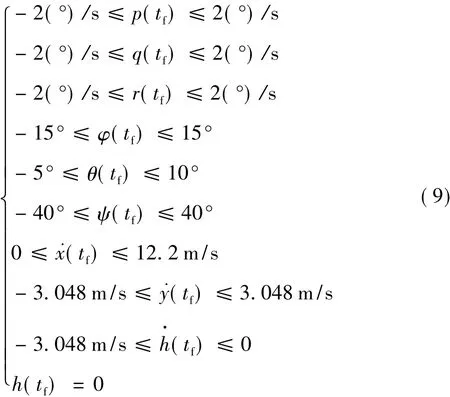
式中:為前飛速度;為上升速度;為側向速度。
5)路徑約束
為了讓直升機尾槳完全失效后自轉下滑的軌跡和操縱時間歷程在可接受的范圍內,本文根據旋翼飛行器適航條例關于自轉下滑的要求,結合當前的飛行狀態、飛行任務和操縱系統特性來確
定最優控制模型的路徑約束:
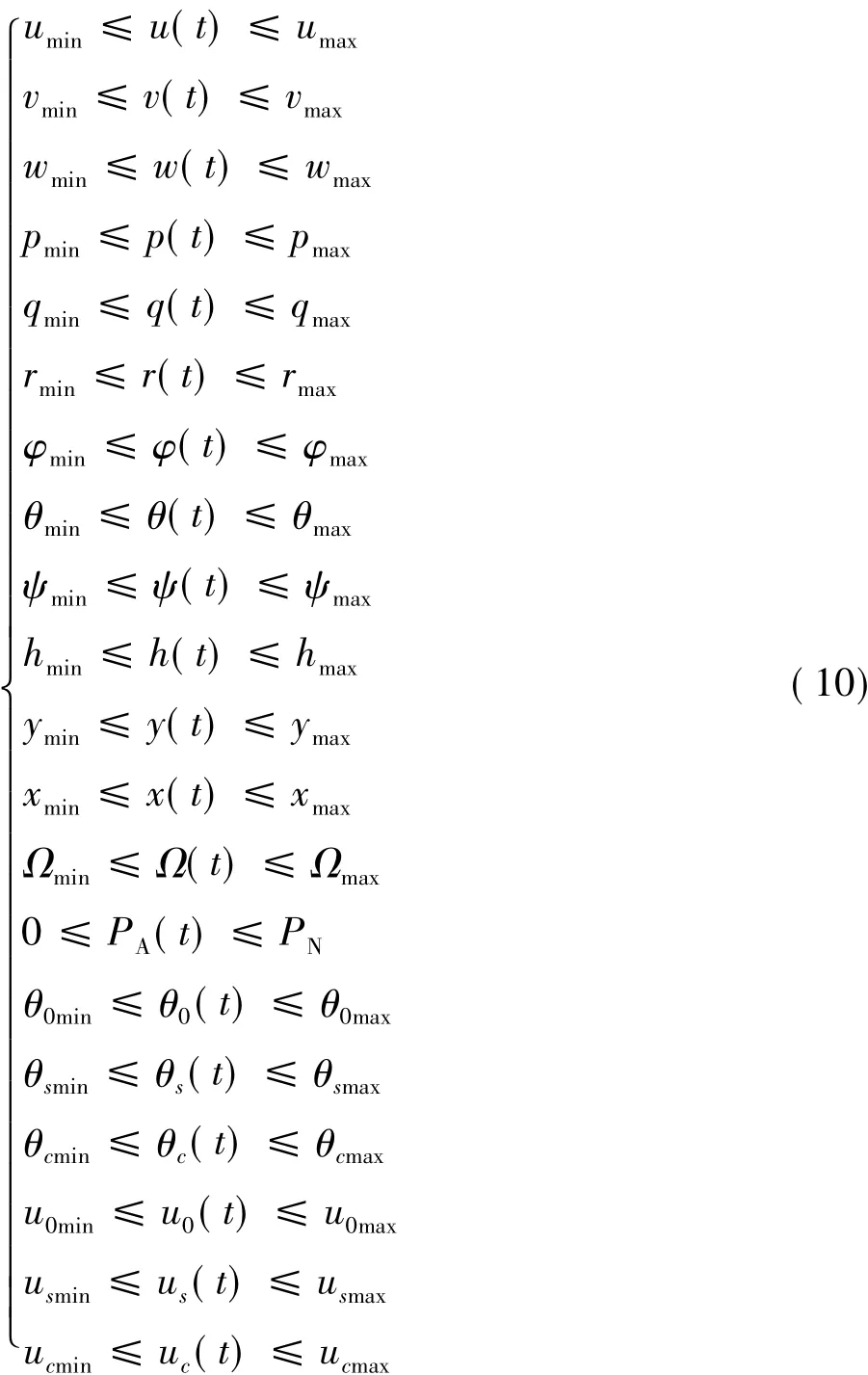
式中:PN為發動機額定功率。路徑約束的具體數值將在算例中給出。
2.2 數值解法
直升機尾槳完全失效后最優控制問題的狀態和控制變量眾多,約束和目標函數非常復雜,故解析求解不可行,需要通過數值求解。本文采用直接轉換法將該非線性動態最優控制問題轉化為非線性規劃問題,并用具有良好魯棒性和計算效率的序列二次規劃算法來求解[19-20]。
2.2.1 無量綱縮放
在求解最優控制問題時,由于優化變量的量綱不同,某些變量之間的數量級相差較大,會引起數值求解困難。所以在數值計算前,首先對飛行動力學模型式(5)中的優化變量進行無量綱縮放。
狀態量、控制量和時間的無量綱縮放如下:
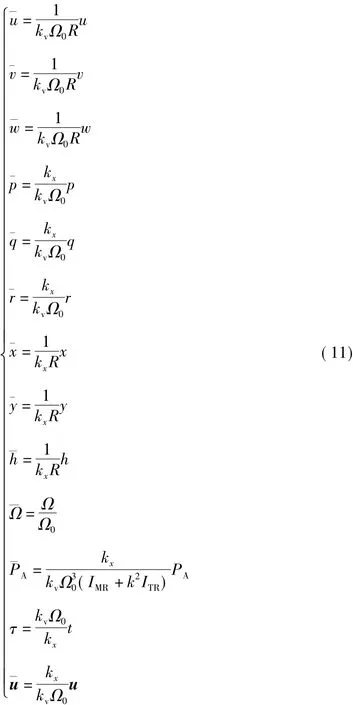
式中:kx和kv為常數;Ω0為直升機標準旋翼轉速;R為旋翼半徑;k為旋翼和尾槳轉速比;ITR為尾槳轉動慣量。為了使無量綱縮放后的狀態變量和控制變量大小接近1,取 kx=10,kv=0.1,則無量綱縮放后飛行動力學模型的主控方程可以表示為
2.2.2 直接轉換法
將時間的無量綱τ等分為N-1個時間段:
根據時間節點把連續空間下的狀態變量和控制變量進行離散可得
對最優控制問題中的微分方程進行離散,得到缺陷等式約束方程為
式中:

對性能指標進行離散得
將路徑約束作用到所有時間節點和中點處,然后將初始邊界條件和末端邊界條件分別作用到初始和末端時間節點處,最終可以將最優控制問題離散成非線性規劃問題。本文應用稀疏序列二次規劃算法[23]進行求解,然后將所有時間節點和中點處的狀態變量和控制變量最優解進行分段3次Hermite插值,即可得到原最優控制問題的最優解,從而得到直升機尾槳完全失效后自轉著陸的最優軌跡和操縱過程。
3 模型和方法驗證
由于目前尚未找到直升機尾槳完全失效后自轉著陸的飛行試驗數據,為了說明所建模型和采用的最優控制方法的可行性和準確性,本文對模型進行了一些修改,使其能夠計算直升機空中停車后的最優自轉著陸過程,從而可以和文獻[24]中的飛行試驗數據進行對比。雖然直升機尾槳完全失效后的自轉著陸與空中停車后的自轉著陸有一些不同之處:前者只能通過側滑來穩定航向的姿態,而后者可以通過尾槳來進行航向控制。但兩者也有一定的相似之處,即均涉及到發動機關閉后的自轉著陸過程。因此,雖然2種自轉下滑對應的飛行狀態和操縱策略并不完全相同,但是通過與直升機空中停車后自轉著陸的飛行試驗數據的對比,可以在一定程度上說明本文建立的旋翼和機體模型的準確性。除此之外,在文獻[24]中,駕駛員可以根據當前飛行任務自行決定自轉著陸過程中的操縱策略和對應的飛行軌跡,而不需要去跟蹤預定的飛行軌跡和操縱方案。因此也可以驗證本文最優控制方法的準確性。
本文所用樣機型號和參數與文獻[24]一致,其基本參數如表1所示。
該型號直升機的初始狀態和飛行任務如下:前飛速度為30 m/s,高度為200 m,航跡角為0°,處于無側滑穩定飛行狀態。隨后駕駛員關閉發動機模擬空中停車,并在2s后操縱直升機進入自轉下滑,最后安全著陸。
在該飛行試驗中尾槳可以正常工作,故需要在飛行動力學模型式(5)中取消式(2)的作用,并加入尾槳總距θt與其關于時間的一階導數ut。
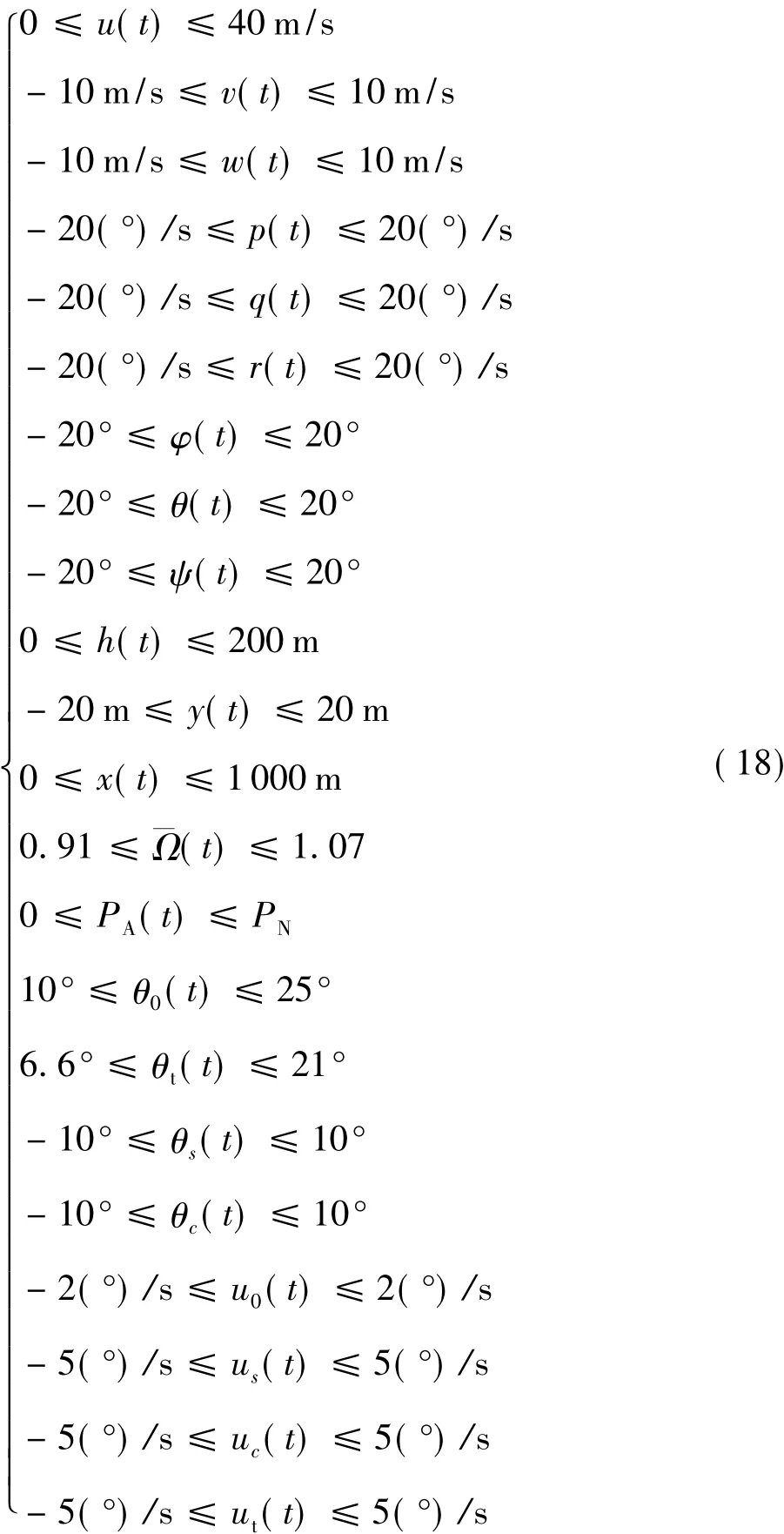
由于發動機首先關閉,在求初始邊界條件時對應的一階微分方程改由式(1)和式(3)構成。末端邊界條件采用式(9)。具體路徑約束如下:
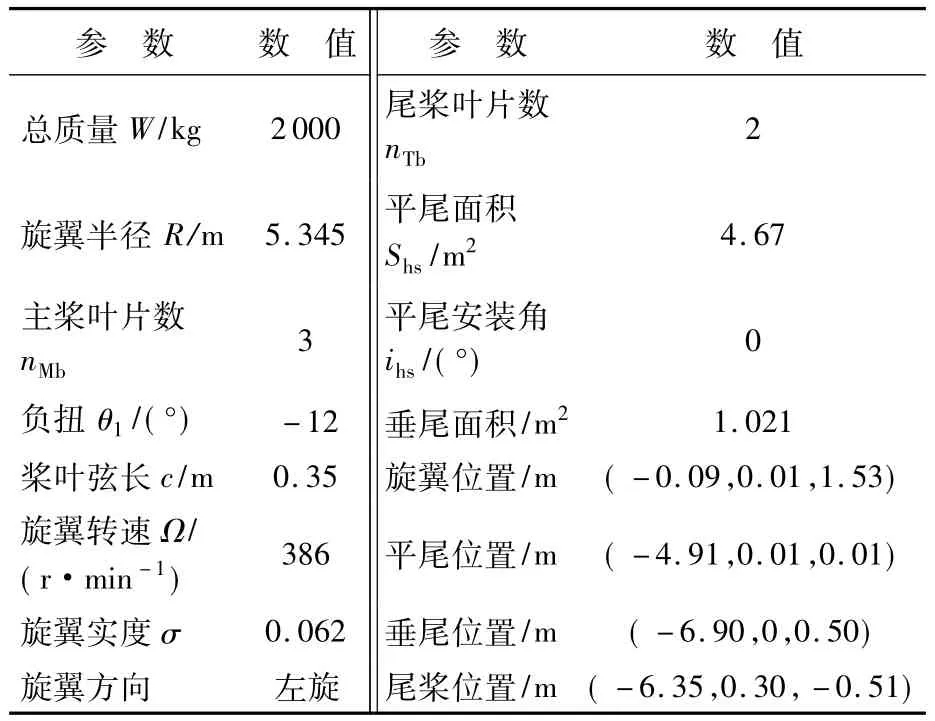
表1 某直升機基本參數Table 1 Basic parameters of a helicopter
性能指標式(7)中的各項權重系數wt=0.01,wv=0.03,w1=w2=w3=0.15,w4=w5=w6=0.12,其中函數L中加入/對應權重系數為 0.15。
圖1為本文計算得到的某型號直升機空中停車后自轉著陸過程與飛行試驗數據的對比,圖中ud為地軸系下前飛速度。從圖1中可以看出,本文計算的最優自轉著陸過程和飛行試驗數據吻合較好。在著陸階段,本文計算得到的總距變化更加柔和,這是因為在飛行試驗時,駕駛員采取的操縱策略并不一定是當前飛行任務下最優的,而本文采用了最優控制方法,對操縱速率進行了控制和約束,因此可以得到更好的操縱策略。通過與飛行試驗數據的對比可以說明本文建立的飛行動力學模型以及采用的最優控制方法的準確性,可以用來研究直升機尾槳完全失效后自轉著陸的最優軌跡和操縱過程。
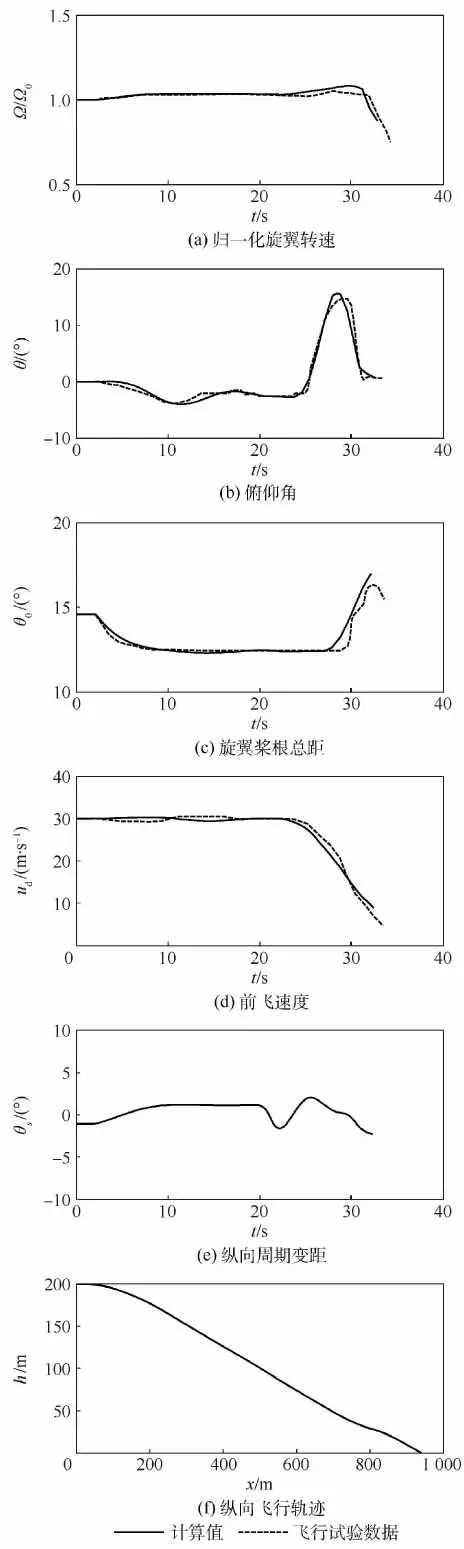
圖1 空中停車最優自轉著陸過程與飛行試驗數據對比Fig.1 Comparison between optimal autorotation landing procedure and flight test data for in-flight shutdown
4 尾槳完全失效后自轉著陸優化
1)計算分析該型號直升,機在以巡航速r度下前飛尾槳完全失效時偏航角速度急劇變化時,尾槳完全失效后自轉著陸的最優軌跡和操縱過程。尾槳完全失效時初始狀態如下:速度為35 m/s,高度為50 m,航跡角為0°,飛行器處于無側滑穩定飛行狀態。隨后尾槳完全失效,尾槳提供側力突然消失,假設駕駛員在反應1s以后關閉發動機并自轉下滑著陸。
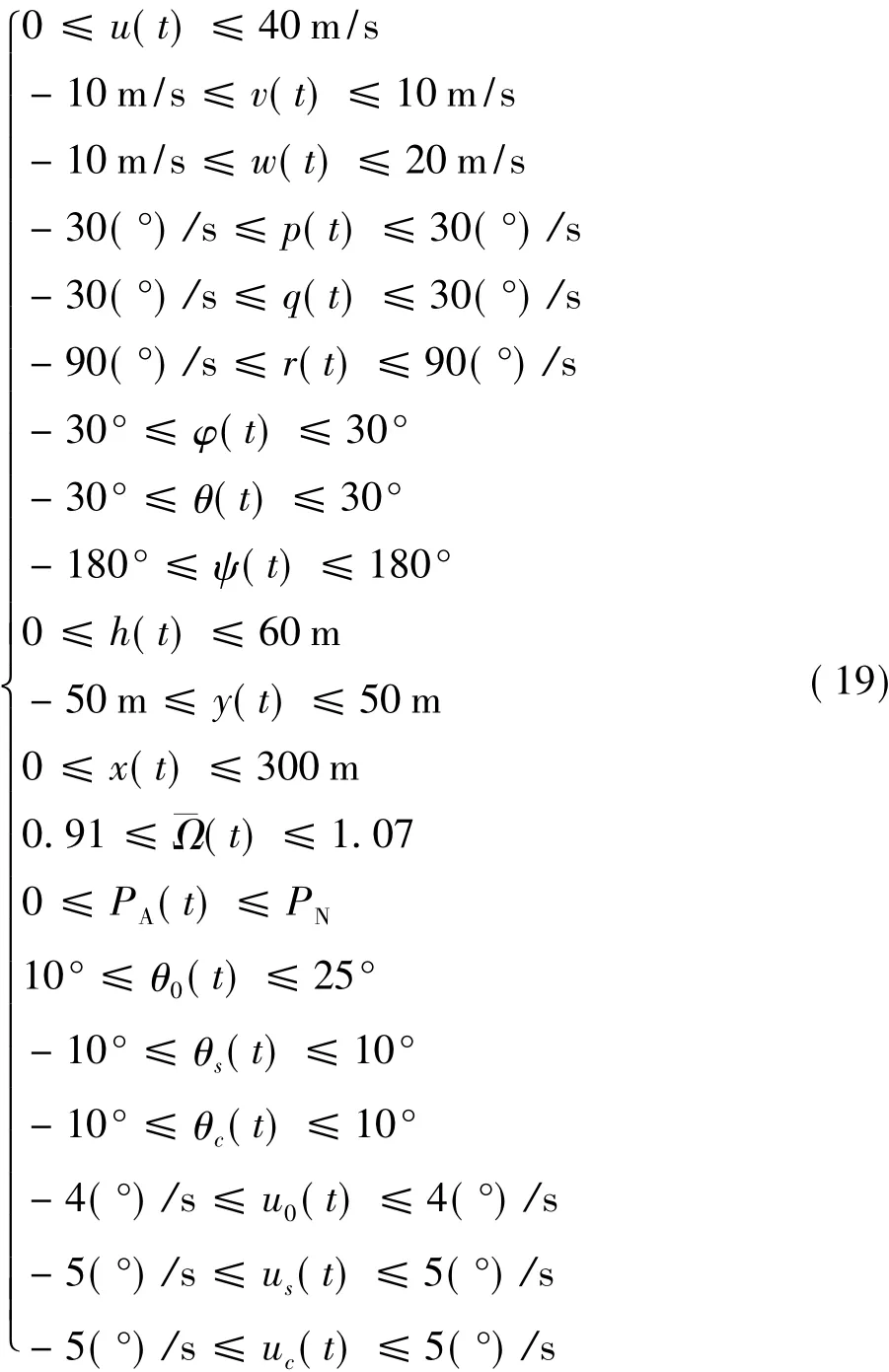
初始邊界條件采用第2節介紹的方法計算得到,末端邊界條件采用式(9)。尾槳完全失效后自轉著陸所需的路徑約束如下:
性能指標式(7)中的各項權重系數wt=0.05,wv=0.05,w1=w2=w3=0.18,w4=w5=w6=0.12。
圖2和圖3為本文計算得到的該型號直升機尾槳完全失效后自轉著陸的最優軌跡和操縱過程,圖中:vd和wd分別為地軸系下側向速度和下降率,β為機身側滑角。
從圖2和圖3可以得到以下結論:(圖2(h)),在1 s后已接近 -50(°)/s,但此時滾轉角速度p和俯仰角速度 q變化較為穩定(圖2(f)、(g));在1 s之后,駕駛員關閉發動機,偏航角速度變化開始減弱,但偏航角(圖2(k))和側滑角(圖3(c))繼續增大,進而產生復雜的耦合運動,其主要表現為出現了明顯的橫滾響應(圖2(i)),這主要是由大側滑角導致直升機垂尾側向力對全機重心產生很大的滾轉力矩所致。
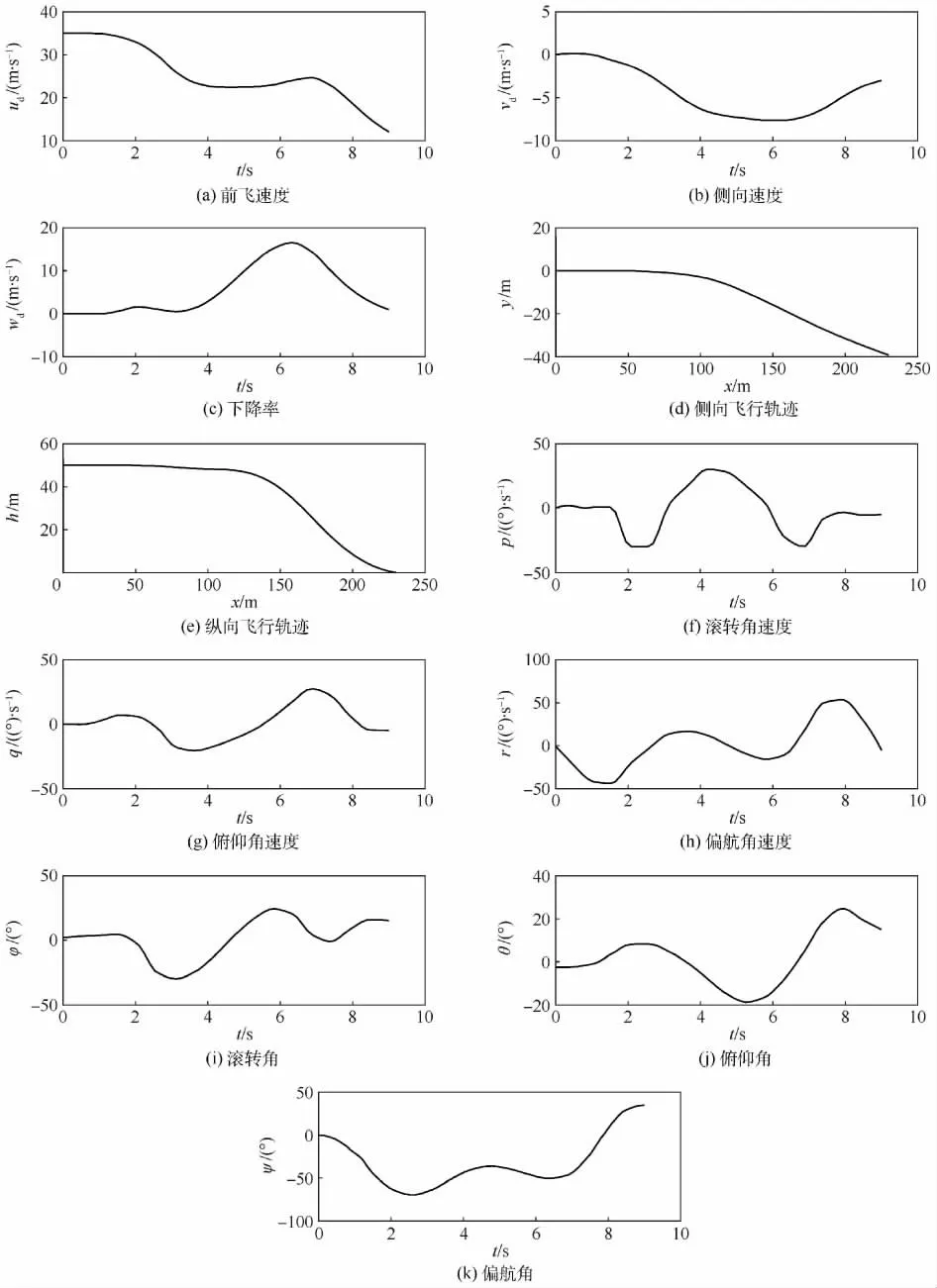
圖2 最優自轉著陸過程的狀態量變化Fig.2 States in optimal autorotation landing procedure
2)駕駛員延遲1 s后開始操縱直升機,將油門關至慢車進入自轉下滑(圖3(a))。自轉下滑期間,駕駛員需要降低總距(圖3(d)),向前推桿通過縱向周期變距(圖3(f))來降低俯仰角(圖2(j))進入下滑,并操縱橫向周期變距(圖3(e))穩定滾轉角(圖2(i)),然后采用側滑方式進一步穩定橫航向的姿態角(圖2(k))。
3)在準備著陸階段,駕駛員開始增總距,同時向后拉桿增大俯仰角(圖3(d)、(f)、圖2(j)),減小直升機的下降率和飛行速度;在俯仰角增大至30°時,駕駛員向前推桿,防止俯仰角繼續增大,從而保持直升機的著陸姿態。
4)著陸時姿態較為平穩,接地側向速度和下降率接近0(圖2(a)~(c)),前飛速度也在允許的范圍之內。
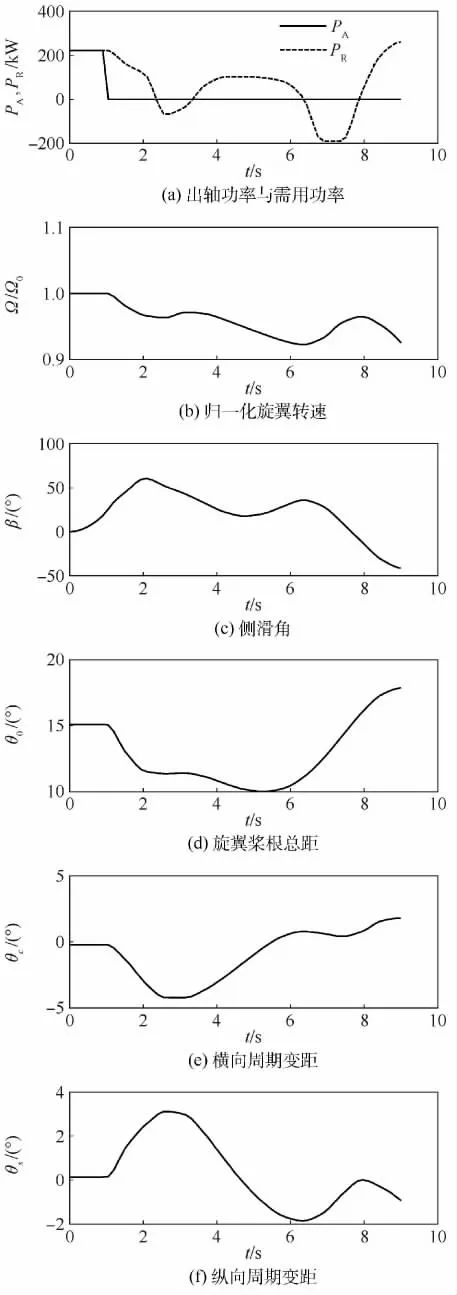
圖3 最優自轉著陸過程的功率、轉速、側滑角與操縱量的變化Fig.3 Power,rotor speed,sideslip angle and controls in the optimal autorotation landing procedure
從以上結論可以看出,本文得到的最優軌跡和操縱過程較為合理,且與文獻[1-3]中由工程試飛得出的定性的結論和建議相符。
5 結論
1)本文建立了適用于計算直升機尾槳完全失效后軌跡優化的6自由度剛體飛行動力學模型,并將直升機尾槳完全失效后的自轉著陸問題轉化為非線性最優控制問題進行求解。從而能夠研究并分析直升機尾槳完全失效后自轉著陸的最優軌跡和操縱過程。
2)本文計算的某型號直升機空中停車自轉著陸的最優軌跡和操縱與飛行試驗數據吻合良好,說明所建模型和采用的最優控制方法的準確性和可行性。
3)該型號直升機在巡航速度下發生尾槳完全失效時,直升機在旋翼負扭的作用下會產生較大的偏航角速度和側滑角變化,進而產生復雜的耦合運動,主要表現為明顯的橫滾響應。因此,駕駛員在關閉發動機進行自轉著陸的同時,還需要通過操縱橫向周期變距穩定滾轉角,并以側滑的方式來穩定橫航向的姿態角,最后安全著陸。利用本文所建模型和最優控制方法得到的整個最優自轉著陸過程,與工程試飛得出的定性的結論和建議相符。
[1]孫杰,高艷輝.直升機尾槳故障及其試飛研究[J].飛行力學,2001,19(4):67-69.SUN J,GAO Y H.The helicopter tail-rotor failure and the flight test[J].Flight Mechanics,2001,19(4):67-69(in Chinese).
[2]于琦,章海紅.直升機尾槳機械性失效及試飛研究[J].飛行力學,2008,26(3):74-77.YU Q,ZHANG H H.Analysis of the tail-rotor failure from mechanical malfunction and research in flight test[J].Flight Mechanics,2008,26(3):74-77(in Chinese).
[3]趙敬超.直升機尾槳失效分析及試飛技術研究[J].航空科學技術,2015,26(3):70-73.ZHAO J C.Helicopter tail rotor failure analysis and flight test technology research[J].Aeronautical Science & Technology,2015,26(3):70-73(in Chinese).
[4]張海.某型直升機尾槳槳距操縱桿斷裂故障分析[J].航天制造技術,2010(4):29-32.ZHANG H.Fault analysis of an operating lever’s rupture in helicopter[J].Aerospace Manufacturing Technology,2010(4):29-32(in Chinese).
[5]李春光,舒平,馬曉明,等.直升機尾槳連桿組件失效分析[J].失效分析與預防,2013,8(6):346-349.LI C G,SHU P,MA X M,et al.Failure analysis on tailor rotor rod components of a helicopter[J].Failure Analysis and Prevention,2013,8(6):346-349(in Chinese).
[6]艾劍波,黃文俊,李滿福,等.直11型機尾槳變距拉桿故障分析與處理[J].直升機技術,2009(3):68-71.AI J B,HUANG W J,LI M F,et al.The analysis and treatment on tail rotor pitch-link failure of Z11 helicopter[J].Helicopter Technique,2009(3):68-71(in Chinese).
[7] GOODMAN N,BAYOUMI A,BLECHERTAS V,et al.CBM component testing at the University of South Carolina:AH-64 tail rotor gearbox studies[C]∥American Helicopter Society Technical Specialists’Meeting on Condition Based Maintenance.Grapevine,Texas:AHS,2009:1-8.
[8] SINGH H K,PAWAR P M,GANGULI R,et al.On the effect of mass and stiffness unbalance on helicopter tail rotor system behavior[J].Aircraft Engineering and Aerospace Technology,2008,80(2):129-138.
[9]胡和平.動力學分析在某直升機尾槳故障分析中的應用[J].直升機技術,2009(3):21-24.HU H P.Application of dynamic analysis in helicopter tail rotor failure analysis[J].Helicopter Technique,2009(3):21-24(in Chinese).
[10] O’ROURKE M J.Simulation model for tail rotor failure[J].Journal of Aircraft,1994,31(1):197-205.
[11] GARCIA R D,VALAVANIS K P,KANDEL A.Autonomous helicopter navigation during a tail rotor failure utilizing fuzzy logic[C]∥Proceedings of the 15th Mediterranean Conference on Control & Automation.Piscataway,NJ:IEEE Press,2007:1-6.
[12] JOHNSON W.Helicopter optimal descent and landing after power loss:NASA TM-73244[R].Washington,D.C.:NASA,1977.
[13] LEE A Y,BRYSON A E,HINDSON W S.Optimal landing of a helicopter in autorotation[J].Journal of Guidance,Control,and Dynamics,1988,11(1):7-12.
[14] CHEN R T N,ZHAO Y.Optimal trajectories for the helicopter in one-engine-inoperative terminal area operations:NASA TM-110400[R].Washington,D.C.:NASA,1996.
[15] OKUNO Y,KEIJI K,AKIRA A.Analytical prediction of heightvelocity diagram of a helicopter using optimal theory[J].Journal of Guidance,Control,and Dynamics,1991,14(2):453-459.
[16] BIBIK P,NARKIEWICZ J.Helicopter optimal control after power failure using comprehensive dynamic model[J].Journal of Guidance,Control,and Dynamics,2012,35(4):1354-1362.
[17] BOTTASSO C L,MAISANO G,SCORCELLETTI F.Trajectory optimization procedures for rotorcraft vehicles,their software implementation,and applicability to models of increasing complexity[J].Journal of the American Helicopter Society,2010,55(3):32010.
[18]孟萬里,陳仁良.直升機單發失效后自轉著陸軌跡優化[J].航空學報,2011,32(9):1599-1607.MENG W L,CHEN R L.Trajectory optimization of helicopter autorotation landing after one engine failure[J].Acta Aeronautica et Astronautica Sinica,2011,32(9):1599-1607(in Chinese).
[19] MENG W L,CHEN R L.Study of helicopter autorotation landing following engine failure based on a six-degree-of-freedom rigid-body dynamic model[J].Chinese Journal of Aeronautics,2013,26(6):1380-1388.
[20]孟萬里.直升機單臺發動機失效后飛行軌跡優化研究和應用[D].南京:南京航空航天大學,2014:27-57.MENG W L.Study and application of trajectory optimization for helicopter flight after one engine failure[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2014:27-57(in Chinese).
[21] KIM C J,SUNG S,PARK S H,et al.Numerical time-scale separation for rotorcraft nonlinear optimal control analyses[J].Journal of Guidance,Control,and Dynamics,2014,37(2):658-673.
[22] KIM S.Certification of transport category rotorcraft:29-2C[S].Washington:Federal Aviation Administration,Department of Transportation,2014:57-146.
[23] GILL P E,MURRAY W,SAUNDERS M A.User’s guide for SNOPT version 7:Software for large-scale nonlinear programming[D].San Diego:University of California,2007:4-29.
[24]牛永紅,楊百興.Z11直升機自轉著陸試飛[J].飛行力學,2001,19(3):74-76.NIU Y H,YANG B X.Flight test of Z11 helicopter autorotation landing[J].Flight Dynamics,2001,19(3):74-76(in Chinese).
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車電器(2018年1期)2018-06-05 01:22:54
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
核科學與工程(2015年4期)2015-09-26 11:59:03