雷達扇區(qū)靜默精細化設置研究
2018-07-12 12:25:48陶松波孟藏珠孟藏珍
火控雷達技術 2018年2期
關鍵詞:設置
劉 浩 陶松波 孟藏珠 孟藏珍
(1.空軍參謀部電子對抗雷達局 北京 100032;2.駐上海航天局804所軍代室 上海 201109;
0 引言
雷達是探測海面、空中和地面目標的重要手段之一,在戰(zhàn)爭和空防中扮演著極其重要的角色。隨著高科技武器的迅猛發(fā)展以及作戰(zhàn)樣式的不斷變化,雷達作為獲取敵方信息的主要裝備,不僅承擔了發(fā)現(xiàn)和跟蹤多種目標的重任,并且所處的環(huán)境也變得越來越復雜,受到的威脅也越來越多,在其發(fā)展中一直面臨“四抗”的威脅[1-2]。縱觀近年來的戰(zhàn)爭,我們可以看出,雷達作為戰(zhàn)爭的“眼睛”,它是敵方的重點打擊對象,只有確保了雷達在戰(zhàn)場上的生存力,我們才不會在戰(zhàn)爭中變成“盲人”受制于對手,同樣也不會出現(xiàn)任人宰割的局面。所以增強這雙“眼睛”的生存能力就變成了各國軍方所追求的重點。
對于現(xiàn)代戰(zhàn)爭中電子偵察和反輻射導彈的威脅[3-6],對雷達的威脅日益嚴重。雷達偵察是為了取得雷達對抗所需情報而進行的電子對抗偵察。通過對敵方雷達發(fā)射的信號搜索、分析、截獲和識別,從而查出敵方雷達的脈沖寬度、工作頻率、天線掃描方式、脈沖重復頻率、天線方向圖和掃描速率,以及敵方雷達的類型、位置等。無論戰(zhàn)時還是和平時代,敵對方從未停止過對對方雷達的偵查。針對此問題,雷達一般采取扇區(qū)靜默的方式進行對抗。但在實際應用中,對于雷達扇區(qū)靜默的使用較為粗略,并沒有一個明確的設置準則,對其大小如何設置沒有依據(jù),這極大限制了雷達扇區(qū)靜默的效果。更有甚者,操作員因擔心靜默扇區(qū)設置不合理發(fā)生漏情而放棄使用雷達扇區(qū)靜默,這嚴重影響了雷達性能發(fā)揮。針對上述問題,本文討論了雷達扇區(qū)靜默精細化設置方法。
1 扇區(qū)靜默設置原理
扇區(qū)靜默設置的理論依據(jù)是根據(jù)偵察機接收到雷達的電磁波功率與其接收機本身的靈敏度相對比,當偵察機接收機接收雷達的信號功率大于等于接收機靈敏度時,我方雷達即被敵方偵察機發(fā)現(xiàn);當偵察機雷達接收機接收的信號功率小于接收機靈敏度時,則我方雷達未被敵方偵察機發(fā)現(xiàn)。所以對于扇區(qū)靜默設置理論依據(jù)是通過對偵察接收機接收到雷達信號的強度,通過與其靈敏度的比較來確定的。
具體公式推導如下。假設R為雷達到偵察機之間的距離,λ為雷達工作波長,Pt為雷達發(fā)射功率,Gt為雷達天線增益,Gr為偵察機接收天線增益,L為極化失配損耗和信號傳輸損耗,Prmin為偵察機接收機靈敏度。則雷達從天線發(fā)射出去的功率為
P=PtGt
(1)
由于雷達在發(fā)射電磁波后,在空間中形成一個球面,向四周輻射,所以偵察機天線處雷達信號的功率密度為
(2)
考慮雷達偵察機接收天線與雷達天線極化損耗以及信號傳輸損耗,則偵察機天線處雷達信號的功率密度由式(2)改為
(3)
假設偵察機接收天線有效面積為Ar,那么Ar表示為:
(4)
則偵察機接收到的雷達信號功率Pr為
(5)
而偵察接收機靈敏度也就是接收機能偵察到雷達信號功率Pr的最小值,此時對應兩者之間的最大距離,所以偵察接收機靈敏度可表示為
(6)
所以,雷達扇區(qū)靜默設置的理論根據(jù)可表示為
θ靜默扇區(qū)={θ|Pr≥Prmin}
(7)
其中,Pr為方位角θ內(nèi)雷達信號被偵察機接收到的功率。
由式(7)可以看出:當敵方偵察機能成功偵察我方雷達信號則需要開啟雷達扇區(qū)靜默;反之,則看作敵方偵察機偵察失敗,雷達可正常工作。
2 扇區(qū)靜默精細化設置模型
在雷達探測過程中,雷達天線是以固定速度順時針或逆時針旋轉(zhuǎn)的。為討論方便,假定雷達是順時針轉(zhuǎn)動。相對于雷達來說,偵察機的天線波束指向雷達方向,可認為是不轉(zhuǎn)動的,所以在探測過程中雷達的波瓣與偵察機的波瓣會周期對準。根據(jù)偵察過程,所以扇區(qū)靜默精細化設置本主要考慮以下三種情況:
1)雷達副瓣與偵察機雷達主瓣對準
該情況下是當雷達進行過旋轉(zhuǎn)掃描時,我方雷達波瓣會與敵方偵察機的雷達波瓣對準,當我方雷達第一副瓣對準敵方偵察機第一副瓣時(雷達天線、偵察機天線一般情況下其他副瓣電平較低,不予考慮),敵方接收機接收到的信號小于敵方偵察機雷達接收機靈敏度,所以沒有被發(fā)現(xiàn)。接著是我方雷達第一副瓣對準敵方偵察機的雷達主瓣,假設此時敵方接收機接收到的信號大于敵方偵察機雷達接收機靈敏度,則被敵方偵察機發(fā)現(xiàn)。此時波瓣對準情況,如圖1所示。
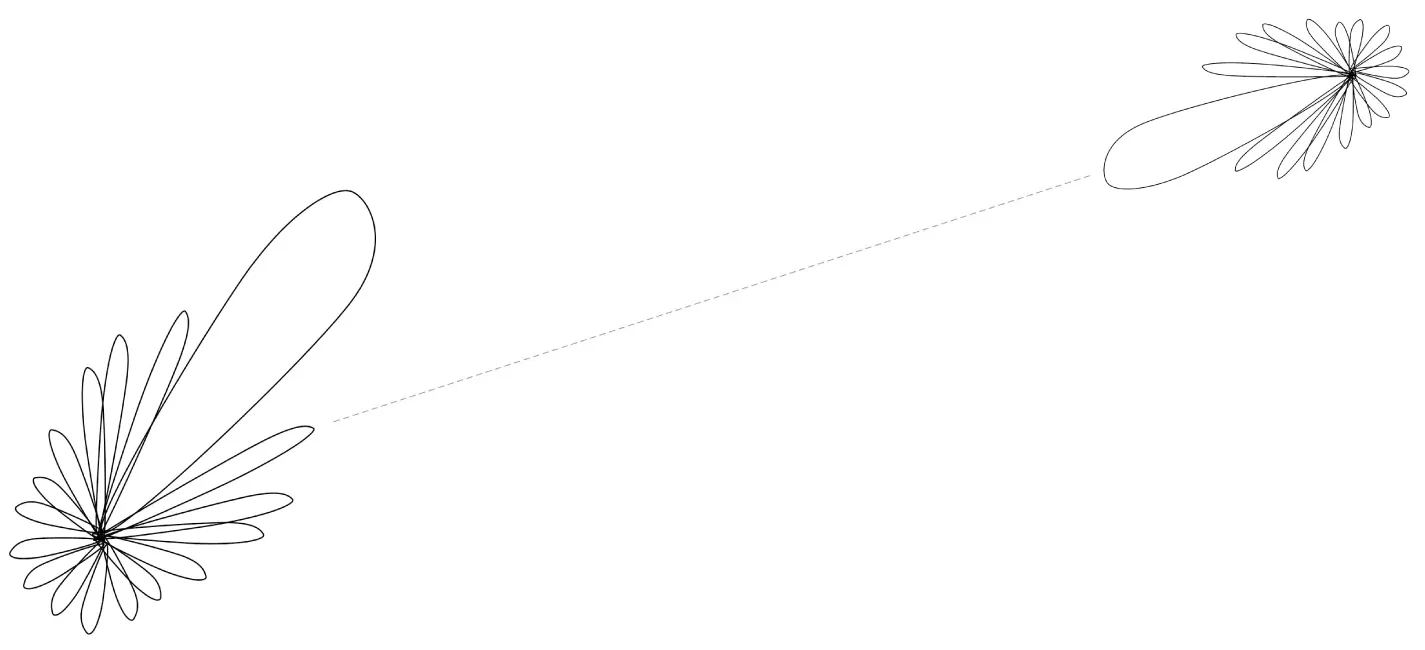
圖1 雷達副瓣與偵察機主瓣對準示意圖
由于此時滿足偵察條件,敵方雷達能偵察到的我方雷達波瓣第一副瓣的信號,根據(jù)式(7)可知,此時雷達扇區(qū)靜默角度的大小為雷達第一副瓣中心與雷達主瓣中心的夾角2倍,即
θ靜默扇區(qū)={θ|雷達兩第一副瓣之間的夾角}
(8)
2)雷達主瓣與偵察機雷達副瓣對準
該情況下是當雷達進行過旋轉(zhuǎn)掃描時,我方雷達波瓣會與敵方偵察機的雷達波瓣對準,在圖1所示情況下不能被對方偵察機雷達所發(fā)現(xiàn),那么雷達波瓣繼續(xù)轉(zhuǎn)動。當雷達主瓣與偵察機雷達第一副瓣對準的情況下,假設此時敵方接收機接收到的信號大于敵方偵察機雷達接收機靈敏度,即被敵方偵察機發(fā)現(xiàn)。那么該時刻雷達與偵察機波瓣對準情況如圖2所示。
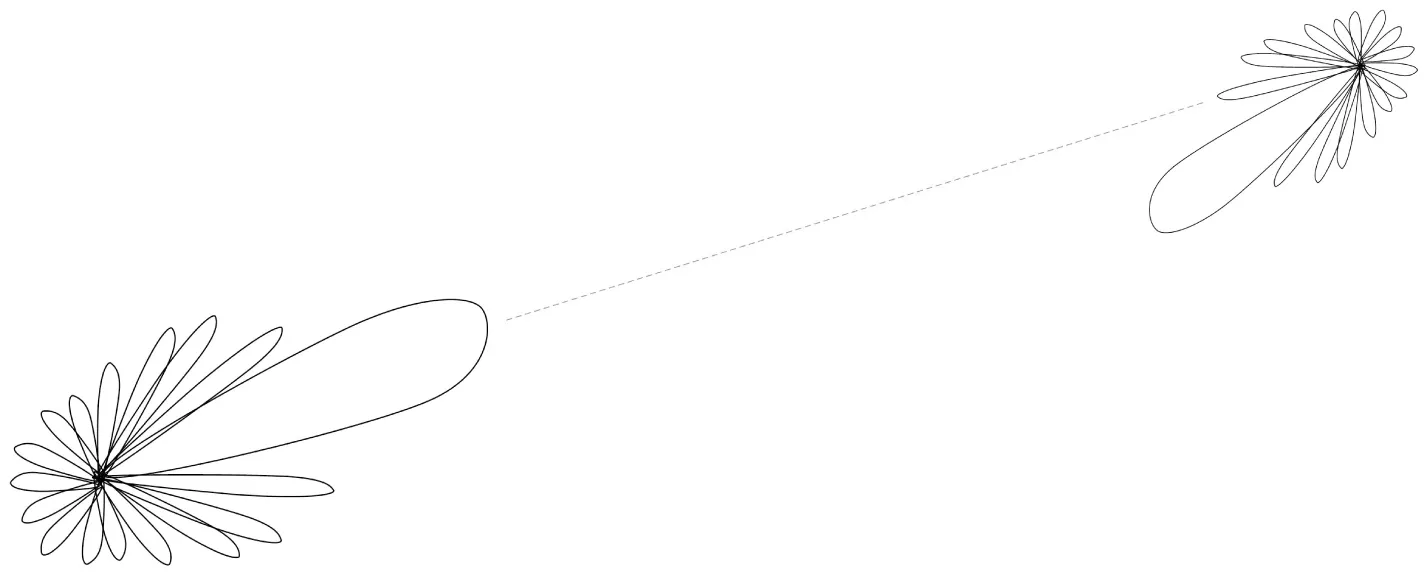
圖2 雷達主瓣與偵察機第一副瓣對準示意圖
由于此時滿足偵察條件,我方雷達波瓣主瓣信號能被敵方偵察機雷達第一副瓣有效探測到。所以雷達扇區(qū)靜默角度的大小為敵方偵察機雷達的第一副瓣中心與其主瓣中心的夾角2倍,即
θ靜默扇區(qū)={θ|偵察機天線兩第一副瓣之間的夾角}
(9)
3)雷達主瓣與偵察機雷達主瓣對準
該情況下是當雷達進行過旋轉(zhuǎn)掃描時,我方雷達波瓣會與敵方偵察機的雷達波瓣對準,在圖1和圖2所展示的情況下都不能被對方偵察機雷達所發(fā)現(xiàn),那么波瓣繼續(xù)轉(zhuǎn)動。當雷達主瓣與偵察機雷達主瓣對準的情況下,此時敵方接收機接收到的信號功率大于敵方偵察機雷達接收機靈敏度,即被敵方偵察機發(fā)現(xiàn)。該時刻波瓣對準情況如圖3所示。
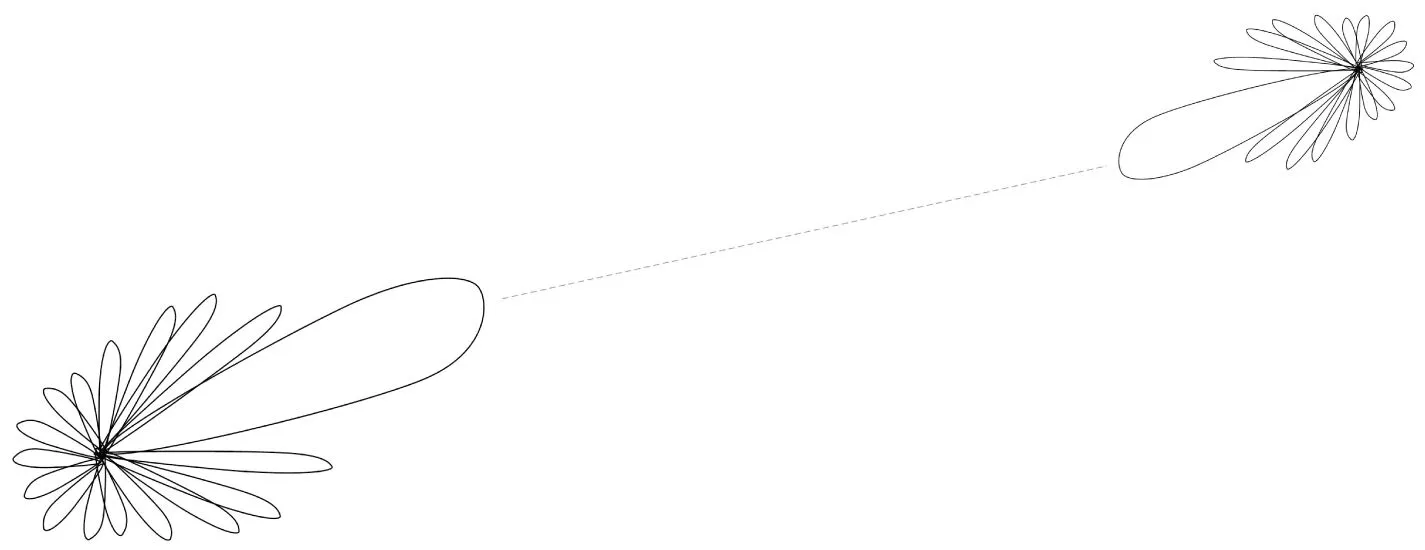
圖3 雷達主瓣與偵察機主瓣對準示意圖
由于此時滿足偵察條件,只能是我方雷達主瓣與敵方偵察機雷達主瓣接觸時才能被發(fā)現(xiàn)。所以雷達扇區(qū)靜默角度的大小為兩者主瓣寬度大的一方的主瓣寬度,即
θ靜默扇區(qū)={θ|max(θ雷達,θ偵察機)}
(10)
其中,θ雷達為雷達天線主瓣寬度,θ偵察機是偵察機天線主瓣寬度。
3 仿真實驗
實驗中假設某雷達的參數(shù)如表1所示。在具體實驗中,由于要考慮部分參數(shù)變化時扇區(qū)靜默設置變化情況,因此表中部分數(shù)據(jù)會根據(jù)實驗情況具體調(diào)整。
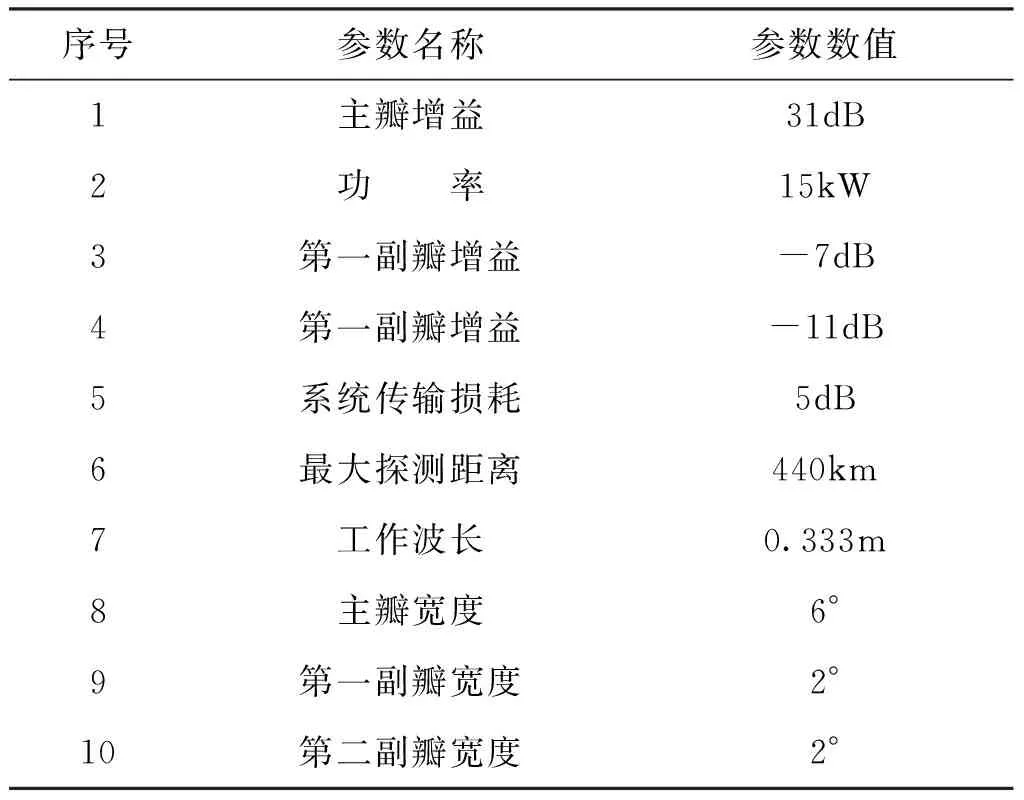
表1 雷達主要參數(shù)設置
由于國外偵察機的相關參數(shù)數(shù)據(jù)無法獲得,所以實驗所用偵察機的相關參數(shù)是結(jié)合雷達數(shù)據(jù)給出的仿真參數(shù),假設國外偵察機的相關參數(shù)數(shù)據(jù)如表2所示。在具體實驗中,由于要考慮部分參數(shù)變化時扇區(qū)靜默設置變化情況,因此表中部分數(shù)據(jù)會根據(jù)實驗情況具體調(diào)整。
表2 偵察機主要參數(shù)設置
實驗一:討論偵察天線主瓣增益變化時的情況。
除偵察機天線主瓣增益外,偵察機、雷達參數(shù)如表1、表2所示。當偵察機的主瓣增益為15dB、20dB、30dB變化時,仿真實驗結(jié)果如圖4所示。
圖4 偵察機的主瓣增益變化時仿真效果圖
由仿真結(jié)果可以看出:當偵察機天線主瓣增益不同時,雷達反偵察時靜默扇區(qū)大小的設置是有區(qū)別的。從圖4可以看出,當主瓣增益為15dB時,雷達與偵察機距離在300km以外,只需要將靜默扇區(qū)大小設為14°,而到300km以內(nèi)則需要擴大靜默扇區(qū)為18°。而當偵察機主瓣增益增大時,則需要向大調(diào)整靜默扇區(qū)的距離向外推,從圖中來看,當偵察機主瓣增益增大到20dB時,在雷達尚未發(fā)現(xiàn)偵察機時即要調(diào)整到18°,這時需要借助技偵情報支持,告知偵察機與雷達的距離,以方便反偵察。當偵察機主瓣增益增大25dB時,同理。圖中給出的值比式(8)、(9)、(10)計算的值要大,是因為在仿真中適量擴大了靜默扇區(qū)大小,以增加反偵察的可靠性,下面實驗中此情況相同。
實驗二:討論雷達發(fā)射功率變化時的情況
除雷達發(fā)射功率外,偵察機、雷達參數(shù)如表1、表2所示。當雷達發(fā)射功率為15kW、20kW、變化時,仿真實驗結(jié)果如圖5所示。
圖5 雷達功率變化時仿真效果圖
由仿真實驗結(jié)果可以得出隨著雷達功率的增大,雷達扇區(qū)靜默角都在相同距離時會隨之增大。當雷達發(fā)射功率位15kW時,在距離500km處向外靜默扇區(qū)大小可設置為14°,而往里則需要設置為18°;相比于雷達發(fā)射功率為20kW時,靜默扇區(qū)大小調(diào)整距離縮小了100km。實驗中距離沒有完全銜接是由于距離離散取值所致。
實驗三:偵察機靈敏度變化時的情況
除偵察機的接收機靈敏度外,偵察機、雷達參數(shù)如表1、表2所示。當雷達發(fā)射功率為15kW、20kW、變化時,仿真實驗結(jié)果如圖6所示。
圖6 偵察機的靈敏度變化時仿真效果圖
由仿真實驗結(jié)果可以看出,隨著偵察機靈敏度的提高,雷達扇區(qū)靜默角都在相同距離時會隨之增大。從圖6中可以看出,在偵察機接收機靈敏度為-60dBm時,當距離小于等于150km時,扇區(qū)靜默的角度要設置為18°;當距離在200km至600km時,此時扇區(qū)靜默的角度應該設置為14°;當距離大于650km時,此時扇區(qū)靜默的角度應該設置為8°。而偵查接收機靈敏度提高到-70dBm時,在550km以內(nèi)扇區(qū)靜默的角度就需要設置為18°;當距離大于550km時,此時扇區(qū)靜默的角度應該設置為14°。實驗中距離沒有完全銜接原因同上文。
從上述實驗可以看出,對于雷達扇區(qū)靜默功能的使用,要最大化發(fā)揮其反偵察的能力,同時兼顧發(fā)揮雷達的探測性能,需要根據(jù)雷達和偵察機的參數(shù),以及兩者之間的距離來科學調(diào)整靜默扇區(qū)的大小。
4 結(jié)束語
現(xiàn)在信息化條件下的戰(zhàn)爭,雷達將面臨重大挑戰(zhàn),工作環(huán)境日益復雜。為了應對敵方偵察,同時擔負空中警戒任務,需要采用扇區(qū)靜默的功能。而現(xiàn)有雷達上對于該功能的使用缺乏科學的指導,實際運用操作性差。為解決此問題, 本文研究了扇區(qū)靜
默的精細化設置方法,考慮了雷達和偵察機的系統(tǒng)參數(shù),結(jié)合偵察機偵察工作過程,詳細討論了靜默扇區(qū)大小設置的方法,為實際作戰(zhàn)中此功能應用提供了科學參考。若將此功能嵌入雷達裝備,加載敵方偵察機參數(shù),即可實現(xiàn)扇區(qū)靜默自動設置實現(xiàn)反偵察,減少中間的人工環(huán)節(jié),可提升雷達扇區(qū)靜默效率。雷達扇區(qū)靜默設置的精細化、自動化必將是今后雷達反干擾的趨勢。
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
水上消防(2020年5期)2020-12-14 07:16:18
中國畢業(yè)后醫(yī)學教育(2020年5期)2020-12-06 06:52:46
鐵道通信信號(2019年7期)2019-10-08 08:38:02
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
鐵道通信信號(2018年1期)2018-06-06 02:27:38
玩具世界(2017年9期)2017-11-24 05:17:29
作文評點報·低幼版(2017年42期)2017-11-16 22:12:34
沈陽醫(yī)學院學報(2015年1期)2015-12-27 13:44:40
醫(yī)學教育管理(2015年3期)2015-12-01 06:43:16
