激光雷達測量精度實驗分析
2018-07-04 05:58:14李現坤李瀧杲李棟鄧正平
機械制造與自動化 2018年3期
李現坤,李瀧杲,李棟,鄧正平
(1. 南京航空航天大學 機電學院,江蘇 南京 210016; 2. 中航工業江西洪都航空工業集團有限責任公司,江西 南昌330024)
0 引言
激光雷達是近些年興起的新型數字化設備,一般由激光發射器、工作站、通信單元以及其他附屬測量設備等組成。激光雷達工作波段紅外光、可見光和紫外光,由于工作波段較短,激光雷達的分辨能力和抗干擾性能遠遠超過普通的微波雷達。與激光跟蹤儀不同,激光雷達可以不使用目標靶球實現非接觸測量,擺脫了現有的非接觸系統大部分都需將傳感器或掃描頭盡可能靠近被測物體的表面,且測量范圍較小的局限,其在航空制造領域的應用越來越多[1-3]。
然而與接觸式測量不同,激光雷達的非接觸式測量精度影響因素較多,其不僅與測量距離有關,還和激光束與激光點法向夾角有關(以下均稱為入射角)。目前激光雷達的非接觸測量主要應用于產品質量檢測、逆向工程以及異形曲面掃描等方面[4]。然而這些應用沒有考慮現場條件對激光雷達測量精度的影響,單純的以廠家給定性能參數為參考依據,而廠家提供的性能參數過于簡單,僅有接觸式測量精度與測量距離的關系,不能全面反映現場情況,尤其是在空間大角度范圍測量情況下。因此在不同的測量條件下對激光雷達進行測量精度檢測對提高激光雷達現場應用是很有必要的。本文首先分析了激光雷達的測量原理和影響測量精度的主要原因,然后分別對入射角度和測量距離進行試驗研究,評估激光雷達非接觸式測量精度與入射角度和測量距離的關系。
1 激光雷達測量原理及精度影響因素
1.1激光雷達測量原理
激光雷達是一種球坐標測量系統[5],其測量原理基于光在空氣中的傳播速度為常數。通過運用調頻相干激光雷達測距技術、高精度反射鏡以及紅外激光光束測得被測點的距離R、方位角AZ和俯仰角EI,使用儀器自己定義的坐標系統轉換得出被測點的三維坐標,如圖1所示。其中方位角AZ為激光束與水平方向旋轉中心軸線的夾角,俯仰角EI為激光束與垂直方向旋轉中心軸線夾角,分別通過激光雷達里面2個獨立的角度編碼器對激光雷達旋轉進行絕對測量得到。
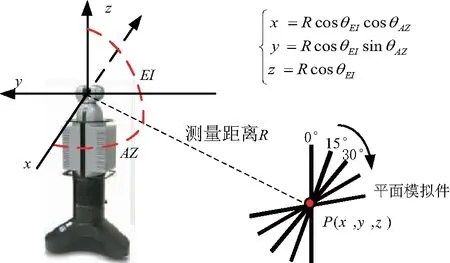
圖1 測量裝置球形測量系統
為了得到被測點的距離R,測量時激光器會發出兩束激光信號,分別為外測信號和內置信號。如圖2所示,外測信號經過空氣傳播直接到達被測物體表面并反射被激光雷達探測器接收,激光在空氣中傳播的距離為被測距離的2倍,與此同時激光雷達又發射一束在定長光纖中傳播的內置信號作為距離測量基準。返回的激光信號比較在定長光纖中傳播的激光信號有△t的時間延遲,△t的時間延遲產生△f的頻率變化,如圖3所示。在激光雷達中可以測出頻率變化△f,通過頻率變化計算出時間延遲,最終得出被測點與激光雷達的距離R。
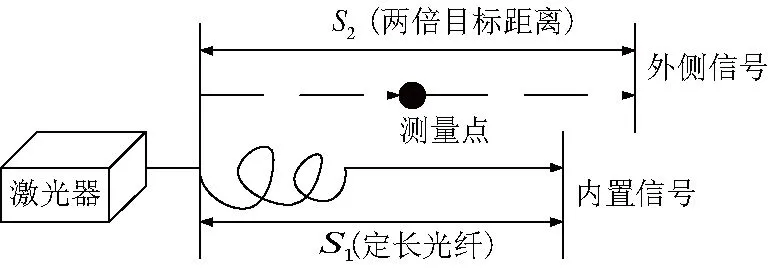
圖2 外側信號與內置信號傳播原理

圖3 延遲時間對于頻率變化
1.2 測量精度影響因素
激光雷達測量精度受外界影響主要表現在:溫度、氣壓和濕度等氣象條件會影響大氣折射率,從而影響距離測量精度;激光光路方向上的溫度梯度、大氣抖動會影響光的方向,使得角度測量誤差增大;外界的振動會導致粗差的出現及儀器和被測物相對位置的緩慢變化[6]。現場環境對激光雷達測量精度的影響除外界振動外,溫度和濕度等對精度影響較小,在嚴格控制外界條件的情況下,可以把外界對測量精度影響降到最小。
除了外界因素影響外,激光雷達非接觸測量精度主要受光斑大小影響。激光雷達在測量過程中,激光束照射在測量物體表面上形成光斑,雷達激光點位理論上是光斑的中心方向。但實際上,激光點可能位于光斑任意位置,因此存在著光斑大小對激光點位測量精度的影響,即不同的光斑大小產生不同的點位精度影響效果[7-8]。影響光斑大小的因素有很多,在眾多影響因素中,掃描特征(入射角和距離)影響最大。當激光束垂直入射時,入射角為零,此時光斑形狀為圓形。當入射角不為零時,圓形光斑在物體表面的形狀變為橢圓,如圖4所示。M.Bitenc給出了橢圓光斑長軸X變化的公式[9]:
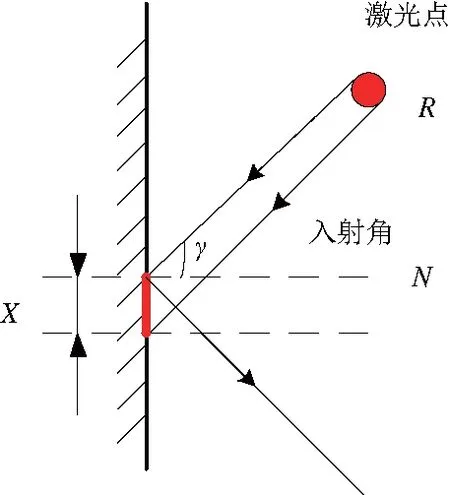
圖4 入射角對光斑長軸影響

(1)
其中,S和H分別為測量距離和激光束寬度,γ為入射角(0°≤γ<90°),R為光斑直徑。而橢圓形光斑的短軸大小與原始的光斑大小基本沒有改變,即橢圓光斑的短軸與垂直狀態的光斑直徑相等。由此可知當入射角和測量距離變化時影響光斑面積大小,進而影響激光雷達激光點位測量精度。假設激光點均等的在光斑內取值,結合橢圓面積公式可以得出當入射角存在時激光雷達測量精度與垂直入射時測量精度關系為:
(2)
其中,a0為激光雷達垂直入射時的測量精度,可以用廠家給定接觸式測量精度表示。aγ為入射角存在時激光雷達非接觸式測量精度。由式(2)可知,當入射角為0時,此時激光雷達垂直入射,激光雷達非接觸式測量和接觸式測量相似,其測量精度主要受測量距離影響。當測量距離不變時,a0值不發生變化,激光雷達的非接觸式測量精度與入射角余弦值呈反比例函數關系。
2 測試方案
實驗采用平面件設計實驗,設計高精度平面模擬件,具體參數為300×200×25mm,通過精加工使其平面度低于±2um。之所以選擇平面件,是因為與激光雷達測量距離相比,工件自身尺寸很小,所以可以近似認為平面上每個測量點與工件的法向夾角和測量距離相等,并且與重復測量單點相比,平面件后續對點云的處理也比較方便。
2.1 入射角對測量精度影響方案
如圖1所示,當評估入射角對測量精度的影響時,固定激光雷達并保持其與平面模擬件直接距離保持為2m并在整個實驗過程中保持不變。調整平面件使激光雷達處于不同入射角度,通過平面度來驗證入射角度和激光雷達非接觸式測量精度的關系,具體實驗過程如下:
1) 調整平面件,使激光雷達垂直掃描模擬件(入射角為0°)擬合得出的平面度作為基準值,即為式(2)中的a0。
2) 通過基準值按照式(2)計算激光雷達在不同入射角時的平面度作為理論值。
3)調整平面件的傾斜程度,使其法向量與激光束夾角分別為15°、30°、45°、60°和75°,激光雷達掃描并擬合平面度作為實測值。
4)比較實測值與理論值的大小,得出實驗結果。
2.2 距離對測量精度影響方案
已知激光雷達接觸式測量精度與距離的關系為10μm+2.5μm/m,即距離每增加1m精度降低2.5μm。固定平面模擬件與激光雷達等高,使其始終與激光雷達入射光線垂直。同樣使用平面度來驗證激光雷達非接觸測量精度和距離的關系,具體實驗過程如下:
1) 使激光雷達距離平面件距離為2 m,測量擬合出平面度的值并作為基準值。
2) 給上述基準值按照2.5 μm/m接觸式測量精度與距離關系分別得出4 m、8 m、10 m、12 m和14 m的值作為激光雷達接觸式測量精度。
3) 移動激光雷達分別距離工件4 m、8 m、10 m、12 m和14 m,分別測量擬合出得出激光雷達非接觸式測量精度。
4) 對比激光雷達接觸式和非接觸式測量精度,得出實驗結果。
3 測量精度評估結果
實驗采用MV260激光雷達,點云數據分析軟件采用的是激光雷達測量系統自帶的測量軟件Spatial Analyzer。為防止點云數量對實驗造成的影響,使每次測量點云數量大致相同,激光雷達采用矩形盒掃描方式(即在平面件上標記矩形掃描范圍),其掃描點間距和線間距均為5 mm。此實驗由同一人員在很短的時間內完成,保證在這段時間內,室內溫度變化不大,并且實驗室沒有其他大型器械在工作,防止器械工作時地基震動造成測量設備的測量誤差。
3.1 入射角對精度影響結果
實驗過程:基于實驗目的,在實驗過程中固定激光雷達與平面模擬件的距離為2m并在實驗過程中保持距離不變,通過手動調整平面模擬件使激光雷達處于不同的入射角度。當入射角不為零時,以激光雷達距離X的中心點為測量距離。由式(1)可知當入射角變化時,橢圓長軸X的值也隨著變化導致光斑面積變化,進而影響激光雷達非接觸式測量精度aγ。
以入射角為0°時的實測值作為基準值,因為測量距離固定不變,所以激光雷達的非接觸式測量精度只與距離有關,按照式(2)分別計算不同入射角度時的理論值測量精度,從而得到理論值。數據處理結果如表1。

表1 入射角對激光雷達測量精度影響
通過實驗結果分析可知,隨著入射角的增大,測量平面件擬合平面度增大,激光雷達的測量精度下降,尤其是超過45°以后激光雷達測量精度加速下滑,并且標準差增大,點云波動較大。圖5是由式(2)計算得出的理論值與實測值對比曲線圖。由圖5可以看出實際曲線與理論曲線之間在入射角<45°時偏差較小,>45°時偏差有增大的趨勢,這可能與受測量環境影響點云波動程度增大有關,但曲線總體趨勢沒有發生變化。所以在現場實際測量時,應盡可能使入射角保持在45°以內以提高測量的可靠性,并且在測量距離不變時,激光雷達的非接觸測量精度與入射角余弦值呈反比例函數關系。
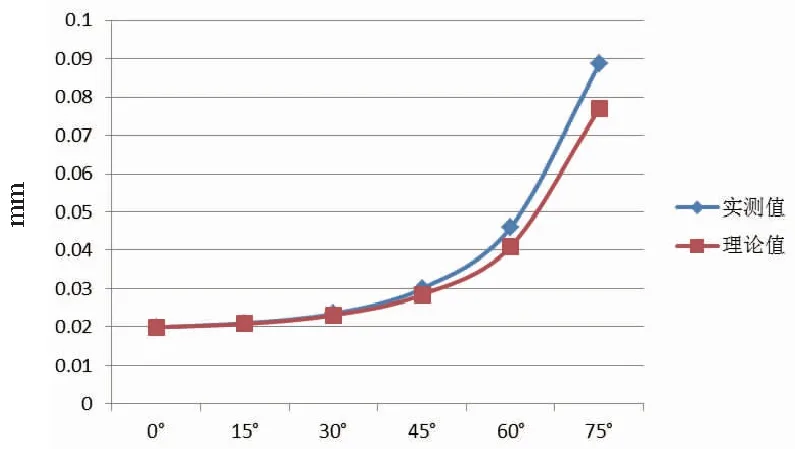
圖5 實測值與理論值對比圖
3.2 距離對精度的影響結果
實驗過程:固定平面模擬件與激光雷達等高,使激光入射光線垂直于平面(即入射角等于0°),測量并記錄點云數據。數據處理結果如表2。
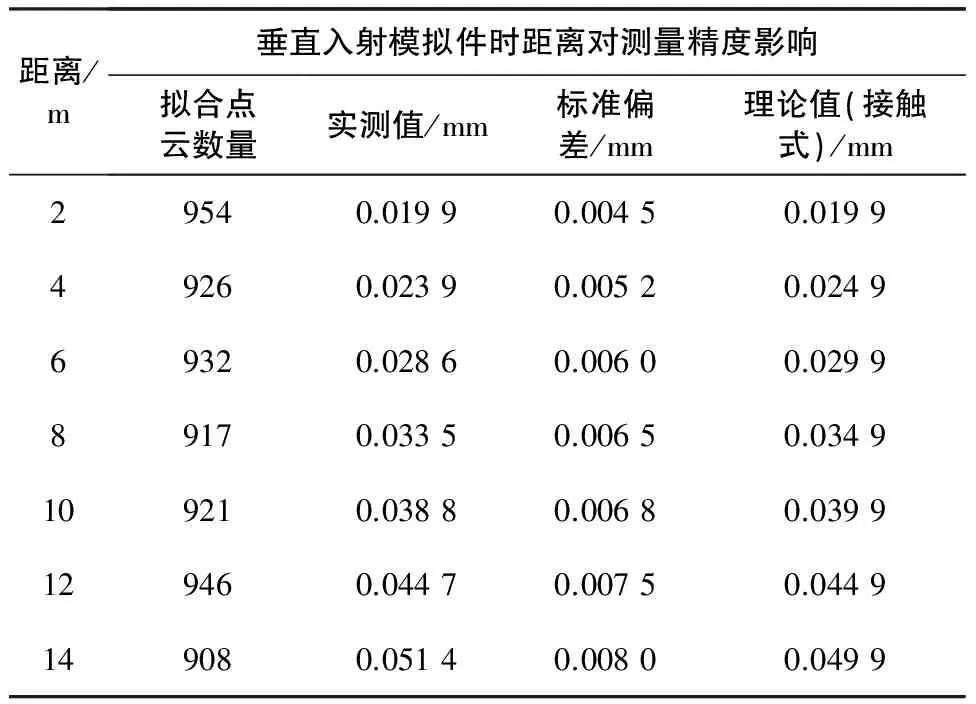
表2 距離對激光雷達測量精度影響
通過分析上述實驗結果可知,與使用目標靶球的接觸式測量相似,激光雷達的非接觸測精度隨著測量距離的增加而下降,并且與測量距離的關系大致呈線性分布。由圖6可知,激光雷達的非接觸測量精度與接觸式測量精度偏差值較小,其微小偏差可能是現場一些環境因素造成的。所以在現場測量時,在環境影響較小的情況下,仍然可以使用廠家給定接觸式測量精度和距離的關系作為激光雷達非接觸式測量精度的評價標準,即測量距離每增加1m,激光雷達非接觸式測量精度下降2.5μm。

圖6 非接觸式與接觸式測量精度對比圖
4 結語
研究了激光雷達的非接觸式測量精度主要影響因素,針對MV260激光雷達,進行了一系列精度測試實驗,分別從入射角度、測量距離出發,設計實驗。通過實驗得出激光雷達非接觸測量精度與入射角和測量距離的關系:激光雷達非接觸式測量精度與入射角余弦值呈反比例關系;與測量距離的關系和接觸式測量相似,即距離每增加1 m,精度降低2.5 μm左右。通過對比入射角和測量距離實驗結果可知,在入射角超過45°以后,入射角對激光雷達測量精度的影響大于距離對測量誤差的影響,所以在實際現場操作時,為了減小入射角度,可以適當地增大測量距離。
[1] 劉瑩瑩, 楊硯儒. 激光雷達及其應用[J]. 天津職業大學學報, 2007,16(2):73-75.
[2] 陳登海, 秦龍剛, 黃翔. 基于激光雷達的飛機水平測量[J]. 中國制造業信息化, 2009,38(5):78-80.
[3] 何秉高,安志勇. 基于激光雷達的水平測量技術研究[J]. 激光與紅外,2014(8):866-869.
[4] St. Louis. Large Scale Assembly Utilizing Laser Radar & IRGPS[A]. Aerospace Manufacturing and Automated Fastening Conference and Exhibition[C]. 2004.
[5] 戴永江. 激光雷達原理[M]. 北京:國防工業出版社, 2002.
[6] 譚錕. 影響激光雷達測量精度的因素探討[J]. 光電子技術與信息, 2005,18(5):11-15.
[7] 袁國根. 入射角對激光點位精度的影響研究[J]. 科技廣場,2014,12:19-23.
[8] 閔志歡,黃茂江. 光斑對激光點位精度的影響的探討[J]. 科技廣場,2014,11:27-31.
[9] M.Bitenc;R.Lindenbergh;K.Khoshelham;A.P.van Waarden. Evaluation of a laser land-based mobile mapping system for monitoring sandy coasts[J]. ISPRS TC VIISymposium-100Years ISPRS,2010(7):5-7.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國塑料(2016年3期)2016-06-15 20:30:00
