基于粒子群算法的汽車傳動系參數多目標優化
2018-07-04 05:58:14錢娟王東方繆小東
機械制造與自動化 2018年3期
關鍵詞:優化
錢娟,王東方,繆小東
(南京工業大學 機械與動力工程學院, 江蘇 南京 211800)
0引言
混合動力汽車作為純電動汽車突破瓶頸技術問題之前現實可行的新能源車型,能夠很好緩解能源短缺和環境污染問題,但傳動系參數匹配和控制策略作為影響混合動力汽車性能的兩個關鍵技術,一直是研究的重點。現從傳動系的參數入手,利用優化算法尋找傳動系速比最優解,通過改進這些參數獲得更佳的整車性能。
由于混合動力汽車的動力參數比較復雜,普通的優化算法已經滿足不了需求[1]。目前在汽車領域的優化工作中應用比較多的智能優化算法主要有:遺傳算法、模擬退火算法、禁忌搜索算法、粒子群優化算法、蟻群算法等[2-3]。粒子群算法在搜索全局最優解的過程中不需要像遺傳算法那樣必須進行交叉和變異操作,算法規則簡單容易實現,在實際應用過程中沒有許多參數的調節,收斂速度快,所以對于解決帶約束非線性多目標參數優化問題有比較好的效果。
1 混合動力汽車系統設計與建模
1.1 動力系統設計
混合動力汽車以國內某款緊湊級轎車為基礎車型,考慮到原車型結構特點和技術難度,最終采用并聯式混合動力電驅動系的單軸結構形式進行布置,其特點是發動機與電機同軸,電機的轉子起著轉矩耦合器的作用,運作時發動機和電機擁有相同的轉速,具體的結構形式如圖1所示。系統主要包括一個自然吸氣發動機、電機、電池組、變速器、主減速器、離合器等[4]。
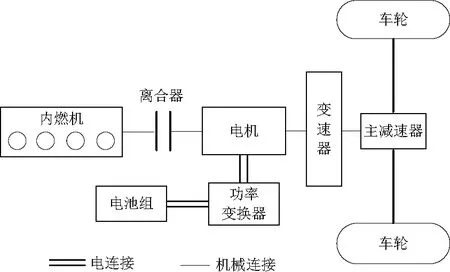
圖1 單軸并聯式混合動力汽車
1.2 電機控制策略分析
根據所研究車輛的能量流動情況并結合電機輔助控制策略基本思想[5],可以將車輛的電機控制策略設計如下:
1) 當車輛在起步和低速行駛時,發動機的工作效率較低,電機單獨驅動。
2) 當發動機提供的轉矩可以滿足整車動力需求并運行在高效區內時,發動機單獨驅動。
3) 當車輛爬坡和急加速等對轉矩需求比較大的情況下時,發動機和電機將同時工作提供轉矩。
4) 當車輛減速或制動時,電機作發電機對產生的能量進行回收。
1.3 基于ADVISOR的整車建模
模型的基本參數:長4 521mm,寬1 788mm,高1 492mm,軸距2 650mm,前輪距1 543mm,滿載質量1 714kg,迎風面積2.39m2,車輪半徑289mm,風阻系數0.317,滾動阻力系數0.015,傳動系效率0.9。汽車在行駛過程中所受阻力為:
∑F=Fr+Fw+Fi+Fj
(1)
式中,∑F為總的行駛阻力;Fr為滾動阻力;Fw為空氣阻力;Fi為坡度阻力;Fj為加速阻力。仿真時,循環工況傳來速度和加速度請求,整車模型則根據傳來的信息計算出整車所受阻力以及需要向車輪模型傳遞的需求牽引力和車速數據[6]。具體的整車模型,如圖2所示。
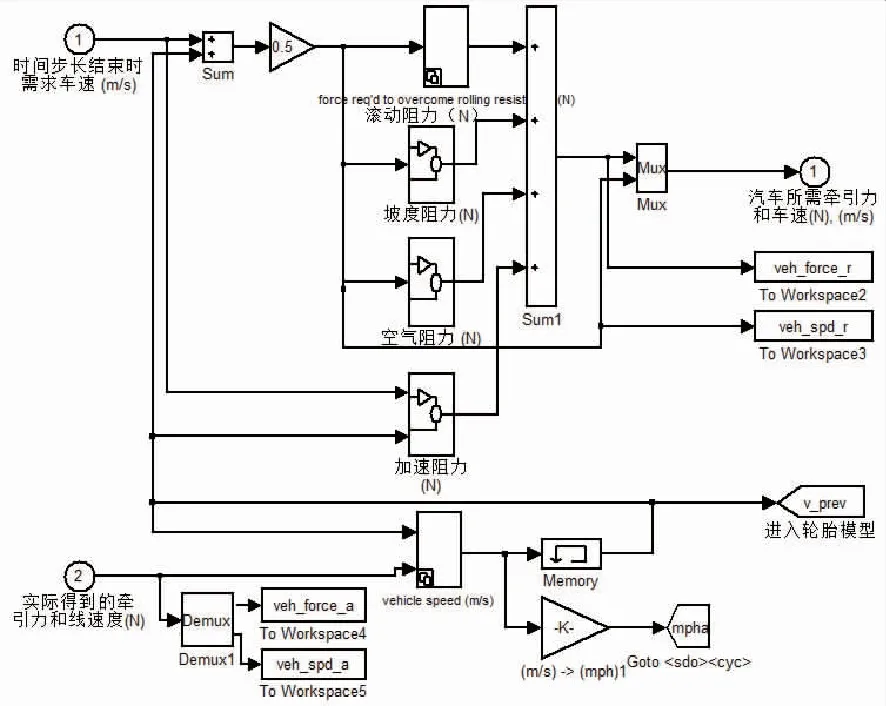
圖2 基于ADVISOR的整車模型
2 混合動力汽車傳動系參數優化
2.1 優化目標函數的確定
目標函數的確定從動力性和燃油經濟性兩個方面著手,但很顯然兩者有著相互制約的關系,為了避免這種情況,以往的做法通常將滿足動力性基本需求作為約束條件,以燃油經濟性達到最佳效果作為優化目標,但是單純的考慮選取其中的一個作為優化目標并不十分全面,這里將綜合考慮兩者的性能指標,分別以0~100km/h加速時間最短以及百公里油耗最低作為動力性方面和燃油經濟性方面的優化目標。具體表達式為:
minF(x)=[Fuel(X),Time(X)]T
(2)
式中,X為優化變量;Fuel(X)為百公里油耗;Time(X)為0~100km/h加速時間。
2.2 傳動系優化參數的選擇
傳動系統的傳動比是影響整車性能的關鍵因素,所以選取主減速器以及變速器各檔的傳動比作為此次優化的變量,通過調節這些參數以獲得更佳的整車動力性和燃油經濟性,用向量表示為:
X[x1,x2,x3,x4,x5,x6]T=[i0,ig1,ig2,ig3,ig4,ig5]T
(3)
式中,i0為主減速比;ig1,ig2,…,ig5分別為變速器一檔到五檔傳動比。
2.3 約束條件
約束條件是指混合動力汽車在經優化獲得部分性能提升的過程中必須遵循的前提條件,從動力性方面出發來設定具體的約束條件,具體為:
1) 最高車速vmax不得低于設計指標:
(4)
2) 最大爬坡度imax滿足設計指標要求:
(5)
3) 為了減輕頓挫感并保證動力傳遞的連續性,變速器速比ig要按照等比級數排列,從低檔位到相鄰高檔位之間兩者的比值需依次減小。
(6)
3 基于粒子群算法的參數優化
3.1 粒子群適應度函數
PSO算法在尋優的過程中以種群每個粒子的適應度作為區分粒子優劣的標準,合適的適應度函數可以顯著增加算法的收斂速度。PSO算法中適應度函數的定義不必像其他算法那樣要求加入部分類似于目標函數的導數值等相關輔助信息,直接將混合動力系統的多目標函數轉化為適應度函數即可獲得比較好的效果,所以粒子的適應度函數可表示為:
Fit(X)=min[Fuel(x),Time(x)]T
(7)
式中,X為種群中的粒子,即傳動系中的各個速比;Fit(X)為適應度函數。
PSO算法的基本流程圖如圖3所示。
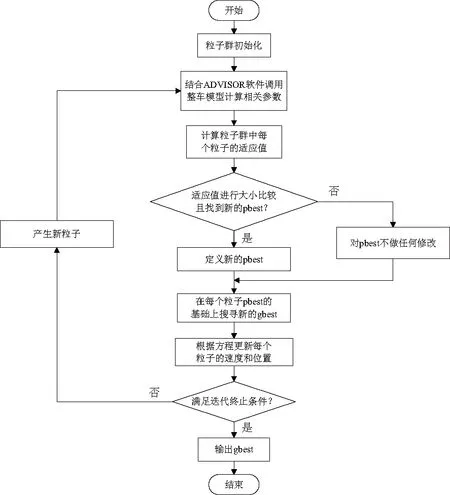
圖3 PSO算法的基本流程
3.2 算法實現過程
ADVISOR軟件可以和Matlab優化工具箱方便的連接,PSO算法發展至今已經相對成熟,將ADVISOR的精確仿真與PSO算法的高效尋優相結合,可以有效應用到傳動系參數優化問題中。圖4為使用兩者進行優化的設計過程,首先ADVISOR根據初始變量進行仿真,計算得到約束函數以及目標函數相關值的大小,將結果反饋到PSO算法,接著通過運算產生一組新的設計變量,將這組變量再次輸入到ADVISOR中進行仿真計算,如此循環,直至條件滿足。

圖4 設計優化過程
3.3 優化結果分析
PSO算法工具箱中設定粒子群規模為50,最大迭代數量為300。采用PSO算法對單軸并聯式混合動力汽車的主減速比和變速器速比的最優解進行搜索,最終求得的傳動速比最優解的取值如表1所示。

表1 傳動速比優化仿真數據
根據優化仿真結果,利用ADVISOR軟件在執行標準較為嚴格的美國城市驅動工況CYC_UDDS進行仿真,得到0~100 km/h加速時間和百公里燃油消耗,結果如表2所示。

表2 整車優化結果性能對比
從表2可以看出,整車燃油消耗降低了2.9%,加速時間減少了3.6%,最大爬坡度提高了2.6%,最高車速雖有所下降,但仍遠大于設計目標制定的160 km/h,除了最高車速,其他各項相關參數相比原設計方案均有所提高改善。可見,優化后的傳動系參數可以有效改善混合動力汽車的動力性和燃油經濟性。
4 結語
為了進一步提升整車性能,采用粒子群算法對傳動系速比進行優化,以百公里油耗和0~100 km/h的加速時間作為兩個子目標函數,并通過建立合適的函數平衡彼此的影響。利用ADVISOR軟件進行仿真計算,仿真結果證明優化后的方案不僅降低了油耗,還提高了整車動力性,為混合動力汽車動力系統的參數優化提供了新的可行方法,拓寬了優化的思路。
[1] 辛斌,陳杰,彭志紅. 智能優化控制:概述與展望[J]. 自動化學報,2013,11:1831-1848.
[2] 鄧偉林,胡桂武. 一種求旅行商問題的離散粒子群算法[J]. 計算機與現代化,2012(3):1-4.
[3] 張其亮,陳永生,韓斌. 改進的粒子群算法求解置換流水車間調度問題[J]. 計算機應用,2012,32:1022-1024,1029.
[4] P. Prochazka, I. Pazdera, P. Vorel and D. Cervinka. Design of small electric car[C]. International Symposium on Power Electronics, Electrical Drives, Automation and Motion, 2012.
[5] 尹安東,趙韓,楊亞娟,等. 多目標遺傳算法的混合動力傳動系參數優化[J]. 中國機械工程,2013,24(4):552-556.
[6] 呂志梁. 插電式混合動力汽車能量管理研究[D]. 杭州:浙江大學,2014.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
