一種HEVC壓縮域的運動目標檢測方法
2018-07-04 13:12:20商明將
小型微型計算機系統 2018年5期
楊 洋,滕 游,2,商明將,朱 威,2
1(浙江工業大學 信息工程學院,杭州 310023)2(浙江省嵌入式系統聯合重點實驗室,杭州 310023)
1 引 言
運動目標檢測是智能視頻分析中的一個重要環節,它可以在像素域或壓縮域中實現檢測[1],現有的檢測方法如幀差法[2]、背景建模法等大多都是在像素域中處理,其中背景建模常用的方法主要有高斯混合模型(GMM)[3]以及視覺背景提取方法(VIBE)[4].文獻[5]基于改進的Surendra背景模型,根據多幀灰度差設定兩個門限值進行目標檢測.文獻[6]利用K均值算法對像素建立高斯混合模型,從背景中分離出前景目標.文獻[7]在VIBE的基礎上,利用三幀差分法自適應獲取每個像素點的閾值,檢測出了運動目標區域.這些方法都是在像素域中對小分辨率視頻進行運動目標檢測,處理過程中需要建立和更新復雜的模型.
隨著視頻信息技術的快速發展,高清、超高清視頻正逐漸進入我們的工作和生活,視頻圖像的分辨率也越來越高.視頻數據通常都是以壓縮的格式傳輸和存儲,基于像素域的運動目標檢測方法需要將經壓縮的視頻碼流解碼到像素域后再檢測,大幅增加了計算復雜度,而基于壓縮域的檢測方法由于可以利用視頻碼流中的運動矢量等編碼信息來實現檢測,可以有效降低計算復雜度.
現有壓縮域中對運動特征的檢測主要是利用以運動矢量[8]為主的編碼信息進行檢測.運動矢量信息由于是從編碼器的角度中獲取,存在一些噪聲信息,這些噪聲信息并不能表示真正運動的區域,所以在對運動區域檢測之前需要對獲取到的運動矢量進行預處理.其中文獻[9]從AVS碼流中碼流中提取出了宏塊與運動矢量信息得到運動目標軌跡,將背景幀與運動目標軌跡結合實現視頻摘要的提取.文獻[10]從H.264碼流中提取出運動矢量,對運動矢量場進行空間濾波、Mean-Shift聚類等處理得到運動目標.文獻[11]對視頻流中提取的運動矢量進行規范化以及特征分析,實現高速運動目標的檢測.國際標準化組織ITU-T的視頻編碼專家組(VCEG)和ISO/IEC的運動圖像專家組(MPEG)于2013年共同推出了新一代的高效率視頻編碼標準(HEVC)[12].與上一代編碼標準H.264相比,HEVC采用了更為靈活的塊劃分編碼技術.目前針對HEVC壓縮域的檢測方法研究還比較少.文獻[13]針對高分辨率視頻,將HEVC編碼得到的運動矢量進行權重值劃分,利用相鄰前景塊的個數,檢測出前景與背景.文獻[14]從HEVC碼流中獲取塊劃分結構與運動矢量信息,先對運動矢量進行空域和時域的標簽分類,再利用馬爾可夫(MRF)模型對標簽場進行運動一致性估計,從而得到運動目標.文獻[13]與文獻[14]的方法只利用了運動矢量與劃分結構,尚未充分利用預測模式等編碼信息,并且還存在整體檢測效果不佳、計算復雜度較高等問題.
為了能夠大幅降低檢測計算復雜度的同時有效檢測運動目標,本文提出了一種HEVC壓縮域的運動目標檢測方法.該方法利用HEVC編碼過程中得到的劃分結構、編碼模式與運動矢量等信息,首先對運動矢量進行預處理,接著利用編碼塊的劃分結構與編碼模式在時域和空域上對運動矢量進行濾波、膨脹等處理,最后以4×4塊為基本單位對圖像進行運動檢測,從而得到運動目標區域.
2 HEVC編碼信息分析
為了靈活有效地編碼視頻圖像,HEVC采用了新的處理單元劃分機制,包括編碼單元(CU)、預測單元(PU)和變換單元(TU).這種劃分機制有利于編碼器根據視頻圖像內容特點自適應選擇最佳的劃分方式.在HEVC中,一幀視頻圖像被劃分成多個不同大小的正方形CU進行編碼,其尺寸可以為64×64、32×32、16×16或8×8,每個CU又被進一步劃分為一個或多個PU進行預測,其預測模式可以為幀內預測模式(Intra模式)或幀間預測模式(Inter模式).在Intra編碼模式下,每個PU沒有運動矢量;在Inter編碼模式下,每個PU都有運動矢量.PU的幀間預測模式包括Skip、Merge、2N×2N、N×N、N×2N、2N×N、2N×nU、2N×nD、nL×2N和nR×2N[12],如圖1所示.Skip模塊的塊劃分方式同2N×2N,無需編碼殘差和運動矢量.
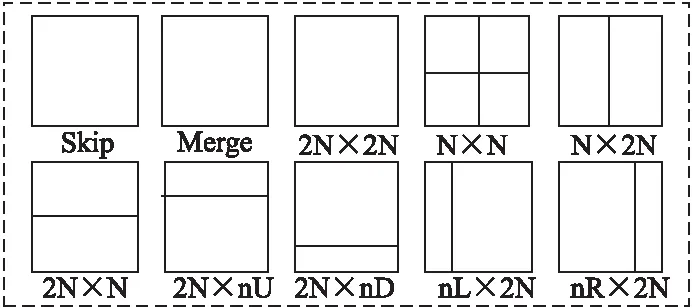
圖1 PU預測模式劃分Fig.1 Division of PU prediction mode
HEVC在幀間預測環節采用了運動估計技術,該技術對預測塊在某個搜索范圍內搜尋與其最相似的匹配塊,匹配塊到當前塊的位移即為運動矢量,它能夠反映出物體的運動信息.因此,可利用運動矢量信息來實現運動目標檢測.圖2為BasketballDrill序列經過編碼后第5幀的中心區域,可以看出運動員所在區域CU的尺寸大多都為16×16或8×8,而背景部分大多都為64×64或32×32,即運動活躍性較大的區域CU尺寸相對較小,運動活躍性較小的區域CU尺寸相對較大.圖2中有箭頭的塊表示該塊存在運動矢量且箭頭的方向為運動矢量的方向,運動員身上的運動矢量一致性較高,但運動員周圍的背景部分存在不少的運動矢量噪聲,需要將其濾除,否則會影響運動目標檢測的精度.
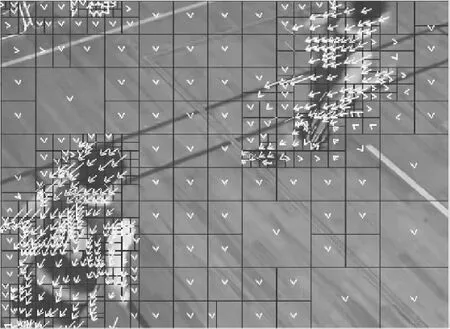
圖2 BasketballDrill序列編碼后的運動矢量Fig.2 Motion vectors after the coding of basketballDrill sequence
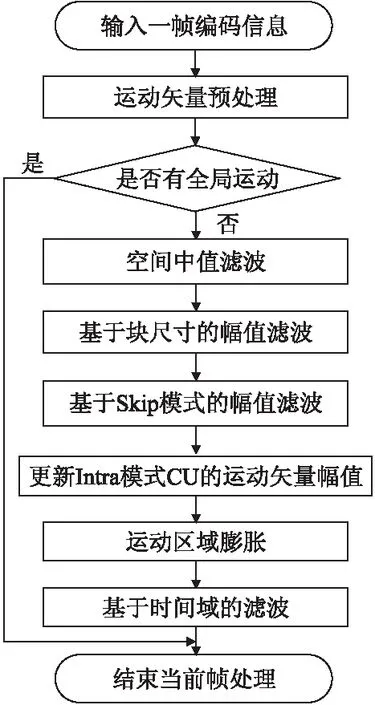
圖3 本文方法流程框圖Fig.3 Flow chart of the proposed method
3 運動目標檢測方法
根據HEVC編碼信息的特征以及前一節對編碼信息的分析,本節提出了一種運動目標檢測方法,該方法的處理流程如圖3所示.首先輸入一幀編碼信息,對運動矢量進行預處理,并判斷當前幀是否有全局運動,若存在,則結束當前幀處理,否則對當前幀的運動矢量幅值進行空間中值濾波,從整體上對噪聲進行濾除;接著進行基于塊尺寸的幅值濾波、基于Skip模式的幅值濾波、以及更新Intra模式的運動矢量幅值,以達到局部上更精細的濾波;然后對運動區域進行膨脹,使空洞區域形成連通;完成空域上的處理之后,再進行時間域上的幅值濾波,最終實現運動目標的檢測.
3.1 運動矢量預處理
本文方法先獲取當前幀亮度分量的運動矢量、劃分結構與編碼模式信息,建立當前幀的運動矢量圖與編碼模式圖.在HEVC編碼過程中,最小的幀間PU尺寸為8×4和4×8,因此本文方法取運動矢量的基本粒度為4×4塊.考慮到運動目標檢測多應用于視頻監控等低延時應用場景,較少使用雙向預測的B幀,因此本文選用的幀類型為前向預測的P幀.
由于攝像機在拍攝視頻的過程中可能存在全局的轉動或者距離前景運動物體很近,導致視頻畫面存在全局運動或者運動范圍很大,通過編碼信息較難獲取到真實運動的區域.本文方法主要是針對視頻監控等背景基本靜止的視頻場景,為了能準確地檢測出真正的運動區域,需要判斷當前畫面是否存在全局運動.首先對當前幀所有4×4塊水平和垂直方向上的運動矢量分別進行排序,選取中值作為水平方向的全局運動矢量值GMVx和垂直方向的全局運動矢量值GMVy.接著用Tgmv表示全局運動矢量閾值,若GMVx與GMVy都位于[-Tgmv,Tgmv]之間,則認為視頻圖像沒有全局運動,則對每個4×4塊進行按照式(1)處理得到運動矢量幅值圖,否則當前幀不處理:
MVamp=|MVx|+|MVy|
(1)
其中MVamp表示4×4塊的運動矢量幅值,MVx與MVy分別表示水平與垂直方向上的運動矢量,由于HEVC是采用四分之一像素精度運動補償,運動矢量幅值的單位為四分之一像素位移.Tgmv為全局運動矢量閾值,本文中取值為2,即全局運動矢量小于等于二分之一像素位移時判定當前幀沒有全局運動.
3.2 空間中值濾波
由于采用率失真優化技術,HEVC編碼后的視頻圖像在靜止區域中會存在一些運動矢量噪聲,這些噪聲相對孤立,而真實運動的物體是以區域的形式在圖像中表現,因此本小節利用相鄰PU塊的運動矢量信息,將在空域上孤立的運動矢量噪聲濾除.
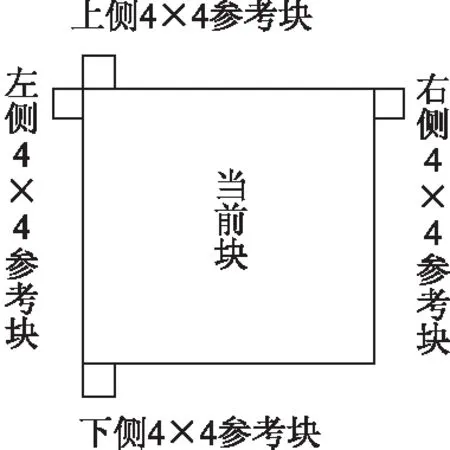
圖4 參考塊位置Fig.4 Position of reference blocks
選取當前PU中左上角4×4塊的運動矢量幅值作為當前PU的運動矢量幅值,記作MVpu.根據當前幀最終的PU劃分形式,以PU為單位對當前幀所有4×4塊的運動矢量幅值進行空間中值濾波.若當前PU不在圖像邊界,則選取與當前PU中左上角4×4塊左側相鄰和上側相鄰的4×4塊,右上角4×4塊右側相鄰的4×4塊以及左下角4×4塊下側相鄰的4×4塊作為中值濾波參考塊,參考方式如圖4所示,并獲取這四個參考塊的MVamp.將這四個參考塊的運動矢量幅值與MVpu一起進行排序,選取中值作為當前PU中所有4×4塊的運動矢量幅值.若當前PU塊位于圖像的邊界且非四個頂角處,則選取圖4中存在的三個參考塊,將這三個參考塊的運動矢量幅值進行排序,選取中值作為當前PU中所有4×4塊的運動矢量幅值.若當前PU塊位于圖像的頂角處,則選取圖4中存在的兩個參考塊,將這兩個參考塊的運動矢量幅值與MVpu一起進行排序,選取中值作為當前PU中所有4×4塊的運動矢量幅值.
3.3 基于塊尺寸的幅值濾波
經過前面的中值濾波可以將周圍運動矢量幅值為零的非零運動矢量噪聲濾掉,但依然存在區域性幅值較小的運動矢量噪聲,這些噪聲也不能表示真實的運動目標.根據第2節的分析,運動活躍性較小的區域CU尺寸相對較大,因此本小節利用編碼塊的尺寸進行進一步的濾波.
利用每個PU所屬CU的尺寸對每個PU的4×4塊按式(2)進行基于塊尺寸的運動矢量幅值濾波,式中CUsize表示所屬CU的尺寸;T64、T32、T16、T8分別表示CUsize為64×64、32×32、16×16、8×8時的濾波閾值,三者關系需滿足式(3).
(2)
T64≥T32≥T16≥T8
(3)
根據第2節的運動分析可知顯著運動的前景目標其運動幅度大都不會小于一個像素,因此本文中T64、T32、T16、T8分別取值為4、2、1、0,即當CUsize為64×64、32×32、16×16時,小于等于一個像素、二分之一像素、四分之一像素的運動矢量幅值被認為是噪聲.由于8×8是最小的CU劃分,其運動活躍性相對較大,因此本文方法不對其進行濾波,保留其運動特征.
3.4 基于Skip模式的幅值濾波
在顯著運動的區域中,PU預測方式大部分不會選擇Skip模式,而當PU的預測模式為Skip模式時它會選取相鄰已有的運動矢量來作為自身運動矢量,如果只對Skip模式自身的運動矢量進行處理,這樣的區域也會被判定為運動區域.因此,本小節根據Skip模式的運動特性分析,利用相鄰PU的預測模式對這部分噪聲進行濾除,對于所有預測模式為Skip模式的PU進行運動矢量幅值濾波.
若當前PU不在圖像邊界,則先選取當前PU在圖4中的四個4×4塊作為Skip模式PU參考塊,接著統計這四個參考塊所屬四個PU中編碼模式為Skip模式的個數Numskip,最后對當前PU中所包含的4×4塊按式(4)更新MVamp:
(4)
式中Tskip為基于Skip模式的幅值濾波閾值.由于運動區域也會存在較為平坦的部分,如人的頭發、皮膚、顏色單一的衣服等相關區域,這些區域在小范圍內運動時也會選擇Skip預測模式,而這部分也應當成為運動區域.經實驗分析,本文Tskip取值為4,以進行嚴格的Skip模式濾波,在濾除Skip模式運動矢量噪聲的同時,保證運動區域的平坦部分不會被濾掉.若當前PU為圖像邊界PU,則將所包含4×4塊的運動矢量幅值直接設為0,減少對運動目標檢測的干擾.
3.5 更新Intra模式CU的運動矢量幅值
HEVC在進行編碼預測時會根據率失真代價來選擇最佳的編碼模式,在一些幀間預測率失真代價較大的運動區域中,也會存在Intra模式的CU,而這部分CU同樣需要成為運動區域的一部分.因此,本小節利用相鄰4×4塊的編碼信息來判斷每個Intra模式的CU是否位于運動區域.
首先將前一小節得到的濾波后運動矢量幅值圖中所有的非零運動矢量幅值進行排序,取中值作為Intra模式CU的運動矢量幅值的參考值,記為MVIntra.對當前幀中的每個Intra模式CU,選取當前CU在圖4中的存在的4×4塊作為Intra模式CU參考塊.統計這些參考塊中運動矢量幅值大于Tamp的個數Tnum1,以及參考塊中對應CU的編碼模式為Intra模式的個數Tnum2,計算Tnum1與Tnum2的和,記為Tnum.本文中Tamp取值為4,即將周圍塊運動矢量幅值大于一個像素位移的當作真實的運動區域來統計.在當前CU為非邊界CU時,若Tnum大于1,表示當前CU周圍存在運動區域,則將當前CU下所有4×4塊的MVamp設為MVIntra,否則設為0.在當前CU為邊界CU時,若Tnum不為0,表示當前CU周圍存在運動區域,則將當前CU下所有4×4塊的MVamp設為MVIntra,否則設為0.
3.6 運動區域膨脹
由于運動矢量是基于PU塊得出的,因此經過上面的處理之后運動區域的塊可能被濾掉,導致運動目標的檢測存在空洞.根據第2節的運動分析可知16×16、8×8的劃分大小運動活躍性相對較高,本文采用5×5鄰域膨脹的方法對由4×4塊組成的運動區域進行膨脹,使得小于16×16像素的運動區域空洞形成連通.HEVC中最小的幀間PU尺寸為8×4和4×8,所以在5×5鄰域內采用圖5中灰色部分的間隔方式選擇膨脹參考塊,該方式與全選擇的效果相同,所有情況均能覆蓋,且能減少統計塊個數.
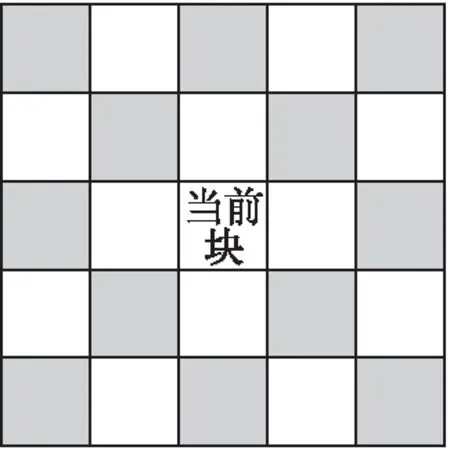
圖5 5×5鄰域膨脹模板Fig.5 Expansion template of 5×5 neighborhood
對當前幀中每個4×4塊,若其MVamp不為0,則該塊的MVamp保持不變,否則根據圖5選擇存在的參考塊,統計這些參考塊中MVamp非0的個數NZnum1,若NZnum1為0,即當前塊5×5鄰域內沒有運動區域,則膨脹之后的MVamp仍為0,否則先獲取這些參考塊中最小且非0的MVamp,記為MinMVamp,再將膨脹后的MVamp設置為MinMVamp.圖6所示為BasketballDrill序列第23幀膨脹前后效果對比,可以看出圖6(a)中運動員的身體以及球的中間存在空洞區域,而圖6(b)中這些空洞區域實現連通,檢測完整性得到了提升.
3.7 基于時間域的幅值濾波
運動矢量噪聲在時域上是孤立存在的,而物體的運動是存在時域連續性,即當前幀的某一塊區域存在運動,那么上一幀相應塊的鄰近區域也很有可能會存在著運動.因此本小節利用相鄰幀在時域上的相關性進一步濾除運動矢量噪聲.

圖6 膨脹效果對比Fig.6 Comparison of expansion effect
在前一步獲取到的當前幀膨脹后的運動矢量幅值圖中,對每個4×4塊,若其運動矢量幅值為0,則濾波之后的運動矢量幅值仍為0,否則先選取當前4×4塊在前一幀膨脹后的運動矢量幅值圖中相同位置4×4塊,以及此位置8鄰域中存在的4×4塊組成時間域濾波參考塊,接著統計參考塊中運動矢量幅值非零的個數,記為NZnum2,最后對當前4×4塊的運動矢量幅值按照式(5)進行更新.圖7為BasketballDrill序列第17幀時間域濾波效果對比,可以看出圖7(a)中左側非運動區域存在較多的噪聲,而圖7(b)中經過時間域濾波后這些噪聲被濾除掉了,并且運動員邊緣部分的檢測精度也得到了提升.
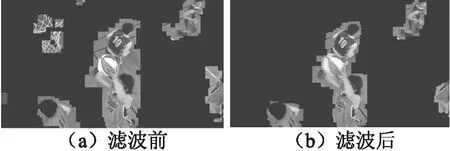
圖7 時間域濾波效果對比Fig.7 Comparison of time domain filtering effect
(5)
4 實驗結果與分析
本實驗的開發環境為Visual Studio2012,HEVC編碼參考軟件為X265_1.8.測試的處理器為Intel Core i5-4590,主頻3.30GHz.X265編碼器的配置如下:幀率30fps,無B幀且I幀后面全是P幀,關閉WPP功能,開啟AMP與Rect劃分方式.實驗選取了兩個HEVC標準視頻序列BasketballDrill和BQMall,以及一個本文錄制的視頻序列,這三個序列的背景均靜止.BasketballDrill序列的分辨率為832×480,所在場景為籃球運動員訓練場景,有多個運動目標、并且目標運動速度都較快.BQMall序列的分辨率也為832×480,所在場景為人物在商場走動的場景,有多個運動目標且運動目標較大,序列中存在沒有運動的人以及人在玻璃上的倒影,這些不納入到真實的前景運動目標中.本文錄制的視頻分辨率為1920×1080,所在場景為人物走動,只有一個較小的運動目標.

圖8 BasketballDrill序列對比圖Fig.8 Comparison chart of four methods for basketballdrill sequence
圖8至圖10分別給出了本文方法與三種經典的像素域運動目標檢測方法在三個序列下的主觀效果比較,其中真實前景groundtruth[13]均為手動標定.圖8為BasketballDrill序列第29幀對比圖,圖8(a)為原始幀,圖8(b)為groundtruth,圖8(c)為三幀幀差法的檢測結果,圖8(d)為高斯混合模型GMM的檢測結果,圖8(e)為視覺背景提取方法VIBE的檢測結果,圖8(f)為本文方法的檢測結果.從圖8中可以看出三幀幀差法、GMM和VIBE在背景區域有較多的噪聲.本文方法在背景區域沒有噪聲,是由于本文在時域和空域上對運動矢量進行了濾波,使得背景區域的噪聲被濾掉.但由于球的運動速度過快導致球的邊緣部分在時間域濾波操作時被濾掉了,未能完整地檢測出.
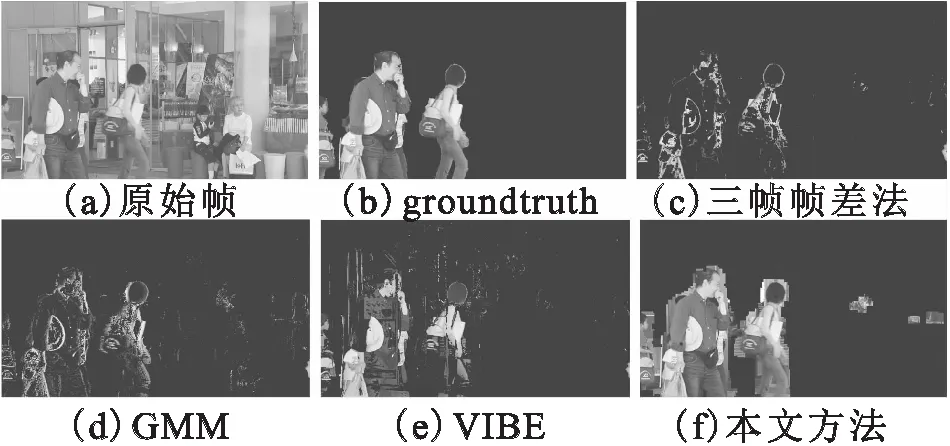
圖9 BQMall序列對比圖Fig.9 Comparison chart of four methods for BQMall sequence
圖9為BQMall序列第7幀對比圖,從圖中可以看到三幀幀差法與GMM對檢測的目標存在較大空洞的問題,人物的完整性檢測較差,這主要因為人身上存在顏色相近區域,運動時這些區域在小范圍內變化不大,而本文采取了膨脹的方法使得空洞的部分連通,因此檢測的完整性較好.由于場景中有較多的玻璃,人在走動的時候玻璃上的倒影也會運動,三幀幀差法與GMM在背景區域還存在不少噪聲,本文方法也在當前幀的右邊出現一些錯誤檢測.

圖10 本文錄制序列對比圖Fig.10 Comparison chart of four methods for our sequence
圖10為錄制序列第179幀對比圖,由于人的腿部運動幅度不大,所以幀差法檢測效果不明顯.GMM對光照的變化較為敏感,因此在背景區域存在較多噪聲,而且人的周圍還存在“鬼影”的現象.VIBE在人的身上存在較多的空洞,對目標的完整性檢測較差.由于本文方法采用了時域和空域上的濾波,因此背景區域沒有噪聲,且完整性較好.
為了比較四種方法在三個序列下的客觀檢測效果,本文采用檢測精度Precision、召回率Recall和F-measure來衡量檢測方法的客觀性能[14-16].檢測精度Precision是指檢測到的真實像素點數占檢測到的所有樣本點數的比例,精度越高表示錯誤檢測的點數越少.召回率Recall表示檢測正確的像素點數占整個groundtruth的比例,召回率越高表示對運動目標的檢測能力越強,F-measure是對Precision與Recall綜合性能的一個比較,相關計算如式(6)、式(7)和式(8):
(6)
(7)
(8)
其中TP為正確檢測樣本像素點數,FP為錯誤檢測樣本像素點數,FN為錯誤檢測的負樣本像素點數.三個序列選取了連續的30幀典型片段進行統計,其中BasketballDrill序列為第15~44幀,BQMall序列為第6~35幀,錄制序列為第149~178幀.
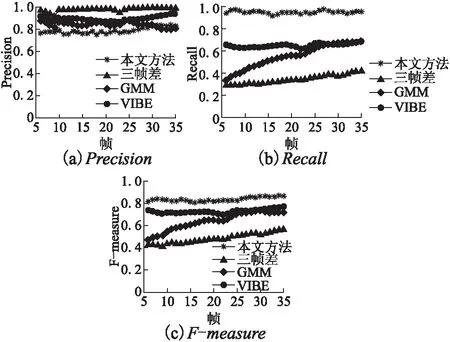
圖11 BQMall序列曲線對比圖Fig.11 Comparison curves of four methods for BQMall sequence
圖11為BQMall序列三個客觀指標的曲線對比圖,由于該序列前面若干幀的運動目標存在較多顏色相近的區域且目標運動幅度不是很明顯,可以看到GMM與三幀差的檢測較差,而本文方法顯示出了較強的檢測穩定性,而且在損失較少的Precision下,Recall和F-measure均明顯優于其它三種方法.表1為四種方法的比較結果,從表1中可以看出本文方法的平均Recall達到了93%,遠高于其它三種方法;相比三幀幀差法、GMM和VIBE,平均F-measure分別提高了44%、8%和4%.由于本方法是基于編碼塊進行劃分的,對運動物體的邊緣處理不夠精細,因此檢測精度Precision稍低于其它三種方法.表2為四種方法對每幀的平均處理時間進行比較,每個序列統計的處理總幀數為200幀.從表2中可以看出本文方法每幀平均處理時間在832×480與1920×1080分辨率下分別為三幀幀差法時間的68%與85%、GMM時間的5%與8%、VIBE時間的17%與27%.上述比較分析說明本文方法在較小的精度損失下大幅地減少了檢測時間,具有更好的實時性,并且提高了對目標的檢測能力,綜合性能也優于其它三種方法.
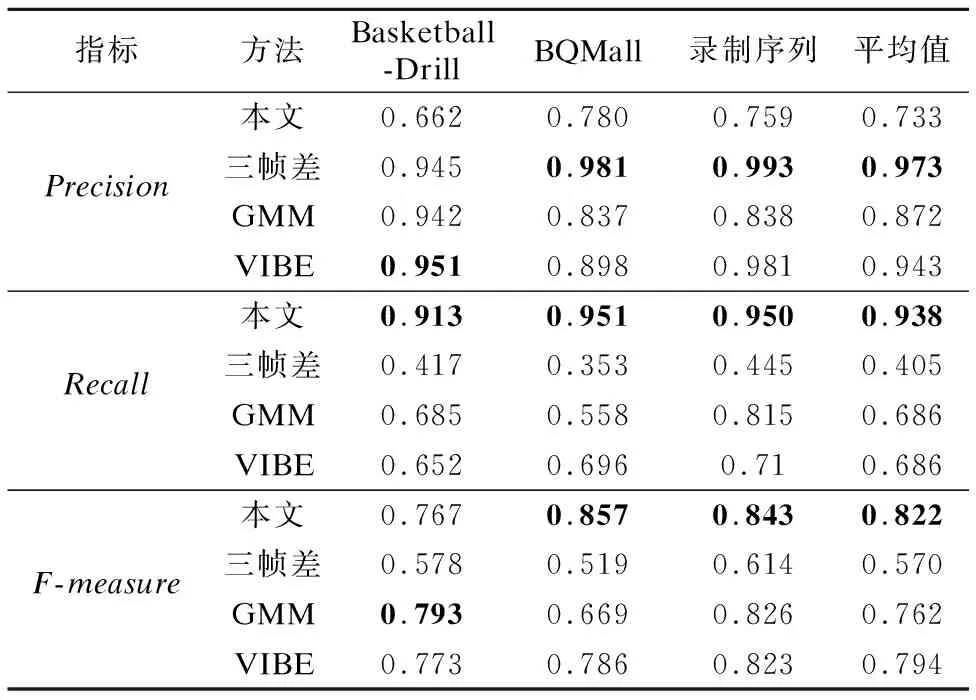
表1 四種方法Precision、Recall、F-measure比較Table 1 Comparison of Precision,Recall and F-measure for four methods

表2 四種方法平均處理時間(ms /幀)Table 2 Comparison of average processing time for four methods
5 結 論
本文利用HEVC壓縮域中的編碼信息,提出了一種運動目標檢測方法.首先從HEVC壓縮域中提取出運動矢量、劃分結構以及編碼模式等編碼信息,通過運動矢量判斷當前幀是否存在全局運動,并對當前幀的運動矢量求取幅值得到運動矢量幅值圖;接著利用CU的尺寸、PU的劃分信息和編碼模式對運動矢量幅值進行濾波以及進行Intra編碼塊的處理;然后對運動矢量幅值圖進行膨脹;最后利用相鄰幀的相關性在時域上對運動矢量進行濾波,得到當前幀的運動目標區域.與傳統的像素域檢測方法三幀幀差法、GMM和VIBE方法相比,本文方法整體上對運動目標具有更好的檢測效果,而且大幅的降低了計算復雜度,更加適合于對分辨率和實時性要求較高的應用場合.當然本文方法還存在一些問題,尤其是對快速運動目標和目標邊緣的處理效果都還需要提升,我們將在后續的工作中進一步研究和完善.
:
[1] Qi B,Ghazal M,Amer A.Robust global motion estimation oriented to video object segmentation[J].IEEE Transactions on Image Processing,2008,17(6):958-967.
[2] Zhuang Y,Wu C,Zhang Y,et al.Realization of moving object detection and tracking algorithm based on frame difference method and particle filter algorithm[C].Chinese Control and Decision Conference,2017:161-166.
[3] Thangarajah A,Wu Q M J,Huo J.A unified threshold updating strategy for multivariate gaussian mixture based moving object detection [C].International Conference on High Performance Computing & Simulation,2016:570-574.
[4] Barnich Olivier,Van Droogenbroeck Marc.ViBe:a universal background subtraction algorithm for video sequences[J].IEEE Transactions on Image Processing,2011,20(6):1709-1724.
[5] Wang Kai,Wu Min,Yao Hui,et al.Moving target detection method based on multi-frame background subtraction and double threshold [J].Journal of Chinese Computer Systems,2017,38(1):179-183.
[6] Mushawwir L A,Supriana I.Gaussian mixture model and spatial-temporal evaluation for object detection and tracking in video surveillance system[C].IEEE International Conference on Information Technology Systems and Innovation,2016:1-7.
[7] He Zhi-hui,Huang Shan,Ran Geng.An improved visual background extractor model for moving object detection algorithm [J].Journal of Chinese Computer Systems,2015,36(11):2559-2562.
[8] Babu R V,Ramakrishnan K R,Srinivasan S H.Video object segmentation:a compressed domain approach[J].IEEE Transactions on Circuits & Systems for Video Technology,2004,14(4):462-474.
[9] Zhao Lei,Huang Hua.Compressed domain synopsis research in AVS surveillance profile[J].Computer Science,2016,43(7):46-50.
[10] Sun Le,Dai Ming,Li Gang,et al.An algorithm of mean-shift clustering-based moving object segmentation in H.264 compression domain[J].Journal of Optoelectronics Laser,2013,24(11):2205-2211.
[11] Mu Chun-di,Xie Jian-bin,Yan Wei,et al.Detecting high-speed moving targets in moving camera environments[J].Journal of Image and Graphics,2015,20(3):349-356.
[12] Sullivan G J,Ohm J,Han W J,et al.Overview of the high efficiency video coding(HEVC)standard[J].IEEE Transactions on Circuits & Systems for Video Technology,2012,22(12):1649-1668.
[13] Praeter J D,Vyver J V D,Kets N V,et al.Moving object detection in the HEVC compressed domain for ultra-high-resolution interactive video[C].IEEE International Conference on Consumer Electronics,2017:135-136.
[14] Niu Zhi-guo,Liang Jiu-zhen,Wu Qin.Moving object segmentation methord based on block in HEVC compressed domain[J].Computer Engineering and Applications,2016,52(14):202-208.
[15] Amit S N K B,Aoki Y.High precision road segmentation for cover level of forward view estimation via stereo camera[C].Asian Control Conference,2015:1-6.
[16] Zhou W,Song T,Lin L,et al.Multi-scale contrast-based saliency enhancement for salient object detection[J].Iet Computer Vision,2014,8(3):207-215.
附中文參考文獻:
[5] 王 凱,吳 敏,姚 輝,等.多幀背景差與雙門限結合的運動目標檢測方法[J].小型微型計算機系統,2017,38(1):179-183.
[7] 何志輝,黃 山,冉 耕.一種改進視覺背景提取模型的運動目標檢測算法[J].小型微型計算機系統,2015,36(11):2559-2562.
[9] 趙 磊,黃 華.AVS監控檔視頻的壓縮域摘要研究[J].計算機科學,2016,43(7):46-50.
[10] 孫 樂,戴 明,李 剛,等.H.264壓縮域中mean-shift聚類運動目標檢測算法[J].光電子·激光,2013,24(11):2205-2211.
[11] 穆春迪,謝劍斌,閆 瑋,等.面向動攝像機的高速運動目標檢測[J].中國圖象圖形學報,2015,20(3):349-356.
[14] 牛志國,梁久禎,吳 秦.基于塊劃分的HEVC運動目標檢測方法[J].計算機工程與應用,2016,52(14):202-208.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52