果園風送噴霧精準控制方法研究進展
2018-06-05 06:54:29翟長遠趙春江NingWangJohnLongPaulWeckler張海輝
農業工程學報 2018年10期
翟長遠,趙春江,Ning Wang , John Long , 王 秀,Paul Weckler , 張海輝
(1. 西北農林科技大學機械與電子工程學院,楊凌 712100;2. 國家農業信息化工程技術研究中心,北京 100097;3. Department of Biosystems and Agricultural Engineering, Oklahoma State University, Stillwater, OK 74078, USA;4. 農業部農業物聯網重點實驗室,楊凌 712100;5. 陜西省農業信息感知與智能服務重點實驗室,楊凌 712100)
0 引 言
果園病蟲害的有效防治可以挽回經濟損失近 10%,目前病蟲害防治主要靠化學農藥,果樹 1 a內噴施農藥8~15次,其工作量約占果樹管理總工作量的30%左右[1-3]。果園噴霧靶標具有不連續種植和冠層較大、枝葉稠密的特點,為了提高藥液穿透能力,國內外推廣使用風送噴霧技術。該技術是聯合國糧農組織推薦的一種高效施藥技術,高速氣流將噴頭霧化的霧滴進一步撞擊霧化成細小均勻的霧滴、增強了附著性能,同時強大氣流翻滾枝葉裹挾著霧滴穿入靶標內膛,大大增加了霧滴貫穿能力[1]。
果園噴霧裝備尚未達到精準探測按需噴施的要求,是目前世界范圍內面臨的普遍問題。為了達到防治病蟲害的效果,實際作業過程中大多采用過量噴施,導致了化學農藥大量殘留,嚴重污染生態環境和威脅果品安全生產。果園噴霧在技術層面上存在2大難題:1)難以在線計算靶標藥量需求分布并實施對靶變量噴霧控制,一方面因藥量不足無法及時消除病蟲害,另一方面過量施用,威脅農產品安全;2)難以在線計算風力需求并進行按需調控,風力過小會導致冠層堂內沉積不足,過大又會將藥液吹出冠層,造成農藥飄移,嚴重污染農田生態環境。為了解決上述難題實現果園精準噴霧,需要研究果園靶標識別方法以獲取靶標位置、體積、稠密程度和病蟲害程度等特征信息,研究噴藥量智能控制技術以實現對靶變量噴霧,研究風力變量調控方法以實現按需送風供給。本文通過綜述國內外果園靶標在線探測、噴藥量調控和風力調控方法研究現狀,分析存在的問題,并指出果園風送噴霧精準控制方法未來的研究方向。
1 果園靶標探測方法
果園靶標在線探測是果園對靶精準噴霧的基礎和前提,其目的是為了在果園噴霧過程中實時獲取靶標的特征信息,以確定靶標位置并計算靶標藥量和風力供給需求。靶標探測所用技術很多,比如光電感知、超聲波傳感、激光雷達、圖像、光譜和電子鼻技術,探測的特征信息有果樹位置、冠層外形輪廓、冠層體積、冠層內部結構、枝葉稠密程度、病蟲害程度等等[4-6],果園靶標特征信息探測方法及其發展水平如表1所示。
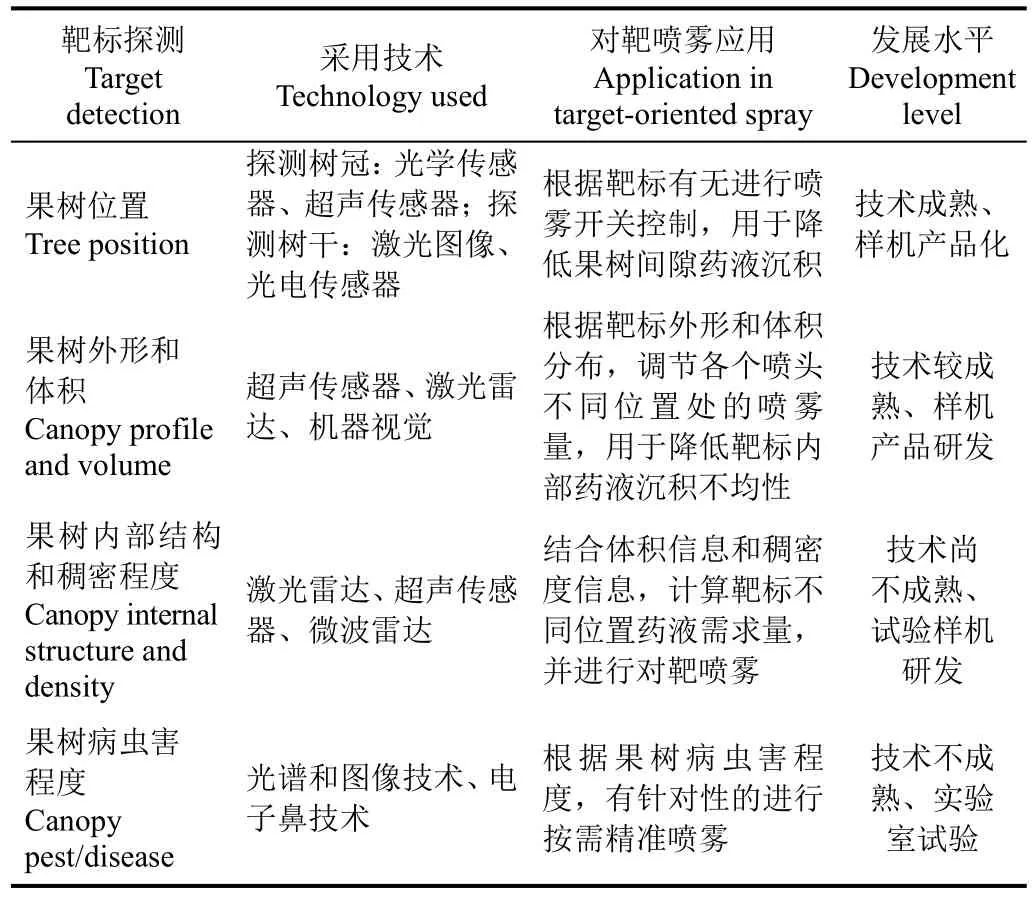
表1 果園靶標特征信息探測方法及發展水平Table 1 Orchard target detection methods and their development levels
1.1 果樹位置探測與對靶控制
果樹位置是對靶噴霧控制中最基本的特征信息,該信息可用于基于靶標有無進行開關噴霧控制,將藥液噴施到果樹靶標上,而非果樹株間空隙內。
靶標位置探測可以根據果樹的不同特點,設計或者選用不同類型傳感器探測不同高度樹冠的位置,常用的傳感器有光學傳感器和超聲波傳感器。基于光學感知原理,研究者設計了多款果樹靶標探測系統和對靶噴霧控制系統應用于果園噴霧中。鄒建軍等[7]采用不易受太陽光干擾的紅外光作為光源,運用集成電路和光學編碼技術設計了果樹靶標探測器;鄧巍等[8]選用了反射率很強的特征波長850 nm并對果樹靶標紅外探測系統進行了優化。李麗等[9]針對果園噴霧主要對綠色靶標進行噴霧的需求,設計了具有綠色識別功能的果樹冠層探測系統。劉金龍等[10]基于模擬正弦調制技術,設計了果園靶標紅外探測器,并對探測距離和反射面積進行了試驗研究。基于光學探測系統的設計為果園對靶噴霧提供了 1種靶標在線探測手段,推動了對靶噴霧控制的發展。
非接觸靶標超聲探測技術的發展,帶動了果樹樹冠位置探測技術的進步。早在1989年,Giles等[11]研究指出基于超聲感知靶標位置進行對靶噴霧的可能性。根據探測目的和精度需求,可以在噴霧左右側分別布置 1個傳感器[12]或者多個傳感器[13-14],以感知果樹靶標的位置。Miranda-Fuentes等[14]基于超聲波傳感器陣列設計了風送對靶噴霧機對冠層稠密的橄欖樹噴霧,在風機前方不同高度布置超聲波傳感器,每個傳感器對應 1組噴頭,控制器根據超聲波傳感器探測到的不同高度冠層存在與否,控制對應高度的噴頭組進行對靶噴霧以提高冠層內部噴霧沉積率,如圖1所示。

圖1 使用超聲波傳感器陣列探測樹冠的果園對靶噴霧機Fig.1 Orchard target-oriented sprayer with ultrasonic sensors detecting tree canopies
如果果園中果樹樹冠形狀和尺寸比較類似,其位置可以根據樹干位置進行估計,也可以采用探測樹干的方法進行靶標探測。翟長遠等[15]采用探測樹干估算樹冠位置的方法,使用紅外光電傳感器設計了幼樹果園靶標探測器,并在實驗室和果園進行了試驗研究,發現該方法能夠準確探測出樹干位置,并進一步推算出樹冠位置,適用于冠層比較類似的果園靶標探測。Shalal等[16-17]采用激光和圖像技術相結合的方法研究并獲得果園靶標樹干位置探測方法,該方法還能成功區分樹樁和果樹支撐架等非樹干物體。Zou等[18]采用紅外光電傳感器實時探測果園靶標位置,并根據探測結果實施對靶噴霧控制。宋淑然等[13]采用激光測距傳感器探測拖拉機與靶標樹干之間的距離,并根據該距離實時調整噴頭臂長度進行仿型噴霧。
無論是直接探測樹冠還是探測樹干估測樹冠,傳感器都需要布置在噴頭前一定距離處,為控制噴頭啟閉位置計算留出時間。靶標和噴頭的相對位置需根據實時車速計算得出,如果傳感器和噴頭之間的距離大于最小株距,還要對探測到的靶標位置進行暫存。實現這種提前探測延遲對靶噴霧控制,可以采用“數組游標”式編程算法,詳見參考文獻[15]。
基于靶標位置探測結果,根據對應位置冠層有無進行對靶噴霧控制,大大降低了藥液浪費和環境污染,其藥液節省率與果樹間隙比例密切相關,空隙比例越大可節省的藥液比例越高[19-20]。
1.2 果樹外形輪廓探測與體積計算
超聲波測距傳感器可以非接觸式測量遠處物體的距離,理論上該傳感器可以用于測量果園果樹靶標到噴霧機之間的距離,進而估算果樹的外形輪廓和體積[21-23]。超聲傳感器發出波束的角度對靶標的感知范圍有直接影響,為了測量某一點的距離,希望波束角度越小越好,在果園靶標探測應用中超聲波束角一般小于15°。
為了驗證超聲傳感器探測果園靶標的可行性,Escolà等[24]使用單個超聲傳感器或者多個固定在不同高度的傳感器,在蘋果園開展果樹冠層探測試驗,發現單個超聲傳感器果園測距誤差比在實驗室內有所提高,平行布置的傳感器陣列如果距離較小會產生互相干擾誤差,布置距離為60 cm時干擾較小。Jeon等[25]在高寒、室外溫度、側風、溫度變化、灰塵、不同行駛速度、藥液霧滴云和多傳感器互擾等多種條件下,對傳感器性能進行了測試,測試結果說明超聲傳感器用于果園對靶變量噴霧是可行的。
用多個超聲傳感器組成探測陣列,通過實時讀取記錄各個傳感器到靶標的距離值,可以獲得靶標的外形輪廓,也可以進一步采用“積分法”計算出冠層體積,探測示意圖如圖2所示[26]。
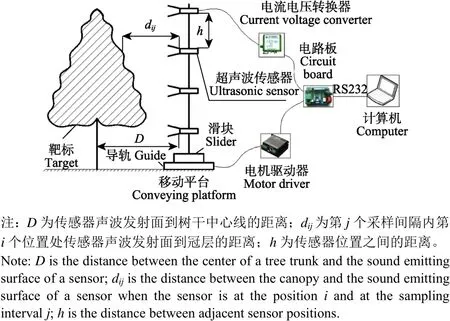
圖2 基于超聲傳感果樹冠層外形探測和體積計算示意圖Fig.2 Schematic diagram of orchard tree canopy profile detection and volume calculation based on ultrasonic sensors
Zhai等[26-27]在低速條件對自制規則樹、山楂樹和花期櫻桃樹分別進行了靶標外形輪廓和體積探測試驗,其結果顯示體積探測精度分別為92.8%、87%和90.0%,外形輪廓探測清晰準確;靶標外形輪廓探測速度影響試驗表明,不同速度對靶標形狀探測影響不大,但速度越高滯后越明顯,滯后量與速度成正比[28]。Maghsoudi等[29]運用超聲波傳感器實時獲取果樹靶標冠層距離和體積,并基于冠層體積變化進行變量噴霧,在噴霧效果類似的情況下,平均節省了34.5%的藥量。
激光雷達高頻率發射出脈沖激光束,根據反射回來的激光回波點云,測量周圍物體各點的距離,也可用于測量果園靶標的外形和體積信息[30-33]。Liu等[34]評估獲知激光傳感器可以成功探測出復雜靶標外形輪廓;李秋潔等[35]采用車載二維激光掃描儀成功探測計算出樹冠中心距離和樹冠體積;Osterman等[36]基于激光雷達設計了果園靶標外形探測系統,噴霧過程中實時感知不同高度果樹冠層的形狀,并在線控制上中下 3個噴霧臂角度和位置以實現仿型噴霧。Miranda-Fuentes等[37]對比了樹冠垂直投影面積法(VCPA)、橢圓體積法(VE)和樹冠輪廓體積法(VTS)3種基于激光點云數據估算樹冠冠層體積方法,3種方法都具有較高精度,其中樹冠垂直投影面積法更適合常規樹冠體積測量。
基于機器視覺獲取果樹樹冠圖像后,通過圖像處理也可以計算果樹冠層的面積,在獲得樹冠體積和冠層面積之間的統計關系后,可以進一步根據冠層面積推算出樹冠體積。丁為民等[38]構建了樹冠面積與樹冠體積對數之間的線性關系模型,進一步提出了基于機器視覺的果樹樹冠體積單點和多點測量方法。
1.3 果樹冠層內部結構探測和枝葉稠密程度估算
果樹冠層枝葉稠密程度是影響果園藥量噴施和風送風力供給的另外一個重要指標。在冠層體積和病蟲害程度等其他因素不變的情況下,枝葉越稠密,藥量噴施和風力供給需求會越大。枝葉稠密程度的評估量化指標有多種,常見的有葉面積指數(leaf area index)、葉面積密度(leaf area density)、點樣方評估值(point quadrat analysis)和生物量密度(biomass density)。其中,葉面積指數是指單位土地面積上葉片總面積占土地面積的倍數;葉面積密度指單位冠層體積內葉片總面積;點樣方評估值是從樹冠冠層中選取采樣區塊,在每個采樣區塊中,朝著某一個方向移動某個點,記錄枝葉與該點的交疊次數,次數越多說明枝葉越稠密;生物量密度是指單位冠層體積內葉片鮮重生物量。
果樹冠層枝葉稠密程度可以通過探測冠層內部結構獲得,Sanz-Cortiella等[39]使用SICK LMS200二維激光雷達傳感器雙邊掃描果樹冠層,獲得了冠層三維結構圖(圖3),并使用統計方法,獲得了落在冠層枝葉上的激光點云數量與葉面積之間的線性關系方程。Sanz等[40]進一步根據果園試驗數據統計結果發現果樹冠層葉面積密度與冠層體積的對數存在線性關系,并建立了葉面積密度和冠層體積之間的數學方程。Llop等[41]將激光雷達用于藤式作物西紅柿冠層稠密度探測,獲得了葉面積指數與冠層體積之間的線性方程。

圖3 通過激光雷達雙邊探測獲得果樹冠層內部結構Fig.3 Orchard tree canopy internal structure detection from both sides using LIDAR
超聲波傳感器發出超聲發射波后碰到障礙物會有超聲回波產生并返回,障礙物形狀大小等特性會影響超聲回波的強度。基于此特點,Palleja等[42]做一假設:超聲回波和冠層密度存在正相關關系,果樹冠層越稠密,產生的超聲回波越強,如圖 4所示,并通過針對葡萄園和蘋果園 1個完整生長季節的觀測試驗,發現超聲回波強度的確和枝葉稠密程度存在正相關關系,并進一步發現點樣方分析值與超聲波回波強度成正比[43]。該結果雖然沒有建立冠層生物量密度和超聲波強度直接的數學關系,但仍能說明基于超聲波回波強度指導噴霧控制是可行的。Li等[44]進一步采用中心組合正交回歸試驗方法,建立了平面果園靶標超聲回波能量與探測距離和冠層生物量密度之間的數學方程,該方程可為基于生物量分布的施藥量和風送風力實時調控提供數學模型支持。
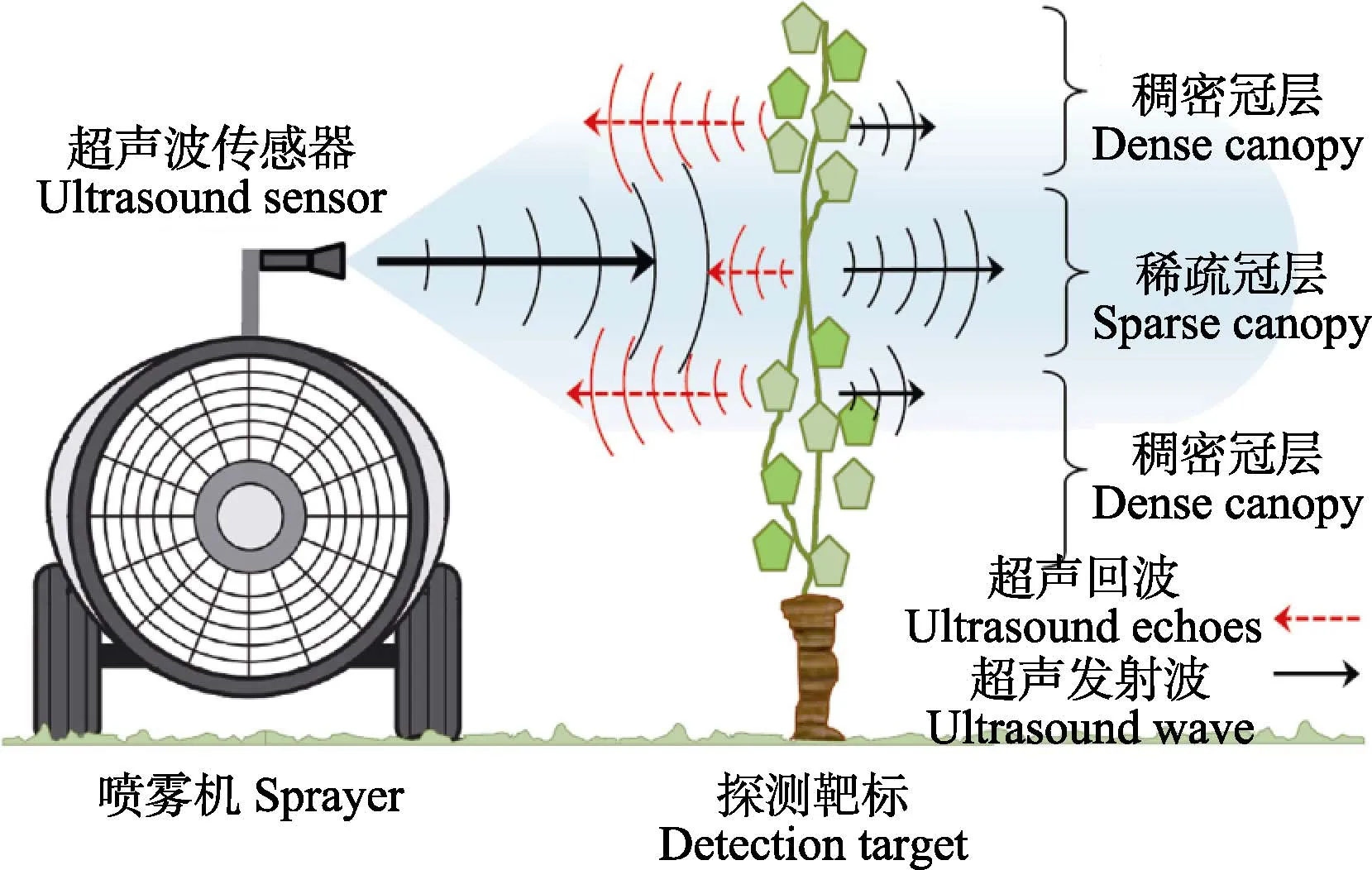
圖4 基于超聲波傳感器冠層稠密程度探測Fig.4 Canopy density detection based on ultrasonic sensor
微波雷達利用電磁輻射原理,可以測量發射器與靶標之間的距離,其具有受大氣環境影響低的優勢,可以用于大尺度冠層結構測量[6]。丁為民等采用微波雷達技術,設計了微波裝置用于探測果樹冠層稠密程度,并用于果樹仿形精量噴霧機上[45]。
1.4 果樹病蟲害程度探測
基于果樹病蟲害程度進行對靶變量噴霧是高等級的果園精準施藥技術。該技術主要實施方式有:1)基于病蟲害分布地理信息進行按需變量噴霧,2)基于病蟲害在線探測進行按需對靶噴霧。第 1種方式需要提前調研繪制出果園病蟲害程度分布地圖,噴霧過程中控制系統讀取該信息,并根據藥液需求分布進行變量噴霧。第 2種方式要求果園噴霧控制系統能在線探測果園不同位置病蟲害分布信息,并實時計算出藥液需求分布進行對靶變量噴霧。
基于病蟲害程度精準噴霧技術核心是病蟲害獲取方法。病蟲害獲取分為直接法和間接法,其中直接法主要基于血清學(serological methods)或者分子技術(molecular methods)在實驗室內檢測病蟲害程度[46-47],該方法準確性高,但是檢測流程相對復雜,費用較高,且難以用于果園在線自動化快速探測[48]。
間接法主要有基于果樹外部形態變化和病蟲害揮發性有機化合物變化 2種方式。光譜和圖像技術可以用于探測果樹外部形態特征變化[49],目前研究者針對不同的對象和病害,采用的方法主要有:可見光圖像[50-53],熒光圖像[54],高光譜圖像[55-56],近紅外光譜[57],熒光光譜[58],核磁共振和太赫茲[59]等。李震等[60]面向柑橘果園蟲害監測應用,基于可見光圖像,開發一種適用于機器自動識別的實蠅分類算法,用于識別橘小實蠅、南瓜實蠅和瓜實蠅等成蟲。Singh等[61]研究了圖像識別分段算法,并針對多種作物和病害進行了驗證試驗,證實其具有病害快速識別和分類的能力,其中針對檸檬的太陽燒傷疾病的識別結果如圖5所示。
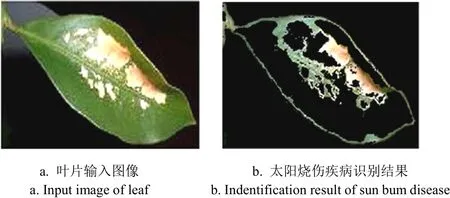
圖5 檸檬葉片輸入圖像和太陽燒傷疾病識別結果Fig.5 Input image of lemon leaf and identification result of sun burn disease
樹木和作物釋放的揮發性有機化合物(volatile organic compounds)占地球大氣層中該氣體的三分之二[48]。果樹枝葉揮發性有機化合物有時會受到病蟲害的影響,基于該原理,可以通過探測該揮發性有機化合物獲得果樹病蟲害信息。電子鼻由一系列氣體傳感器組成,可以用于探測揮發性氣體的變化,進而探測病蟲害程度。典型的電子鼻主要由測試箱、計算機、蒸汽發生器、清潔氣體容器等組成,其中測試箱中包括溫控腔、電子鼻傳感器陣列、氣體流控制通道等,被測對象氣體進入溫控腔后,傳感器陣列分別讀取數據后傳送給計算機進行分析處理以得出最終探測結果[62]。Li等[63]使用Cyranose?320電子鼻通過一個可控的環境監測出了藍莓健康和病害時釋放的氣體變化,表明該技術可以用于植物病蟲害程度非接觸性測量。Laothawornkitkul等[64]也使用電子鼻驗證了通過探測該揮發性有機化合物獲得作物病蟲害信息的可行性。
病蟲害程度探測方面,國內外學者開展了大量的研究,也取得了一定的成果,部分研究結果也預示了病蟲害程度快速探測的可能性。但該成果離果園在線探測指導對靶噴霧需求相差較遠,還需要有針對性地開展深入研究。
1.5 小 結
果園精準對靶噴霧控制需要獲取果樹冠層的位置、體積、枝葉稠密程度和病蟲害程度等特征信息,從技術層面上看,這些特征信息在線探測難度依次變大。目前看來,果樹冠層位置和體積特征信息獲取方法取得了較大的突破,對應的裝備也趨于成熟,正朝著產品化方向深入發展;枝葉稠密程度和病蟲害程度方面成果主要處于實驗室內技術攻關階段,有待進一步朝著果園應用方向深入研究實現技術突破。
2 果園噴施藥量調控方法
變量噴霧技術早在大田噴桿式噴霧機研發中就得到了巨大的發展和廣泛運用[65]。由于大田施藥基本需求是大田地面藥液均勻沉積,噴霧系統主要通過速度傳感器獲得噴霧機行駛速度,采用管道藥液總藥量控制方法實時調控噴藥量,以實現按照設定施藥量均勻噴施農藥。與大田變量噴霧控制需求相比,果園噴霧藥量調控不僅需要對管道總藥液進行控制,而且需要對不同高度位置噴頭藥量進行獨立調控[66]。
2.1 管道總藥量控制方法
果園噴霧機大都采用噴藥前將農藥按照某種比例在藥箱中配比完成,噴藥過程中通過實時調節管道流量調控施藥量。該控制系統相對簡單,可以采用流量傳感器實時監測噴藥量,根據噴藥需求使用電動調節閥改變管道噴霧壓力,進而調控噴藥量。由于系統的壓力差與流量的平方成正比,也可以使用較便宜的壓力傳感器代替流量傳感器,通過監測管道壓力計算出實時噴藥量,以進行變量噴霧控制。控制系統的控制策略有很多種選擇,可以采用滯環開關控制[67]、經典 PID控制[68-69]、模糊控制[70-72]和人工神經網絡[73]等控制策略。郭娜等[74]構建了旁路節流式噴霧管道,如圖6所示,并采用模糊PID 控制與 Smith 預估控制相結合的方法,設計了一套具有較好適應能力和魯棒性的變量噴霧控制系統。基于管道總藥液控制方法的調控系統也進行了很好的產品化和市場化,比如Raven公司的SCS 4000/5000 Series? 系列[75]和Micro-Trak systems公司的SprayMate? II系列[76]。
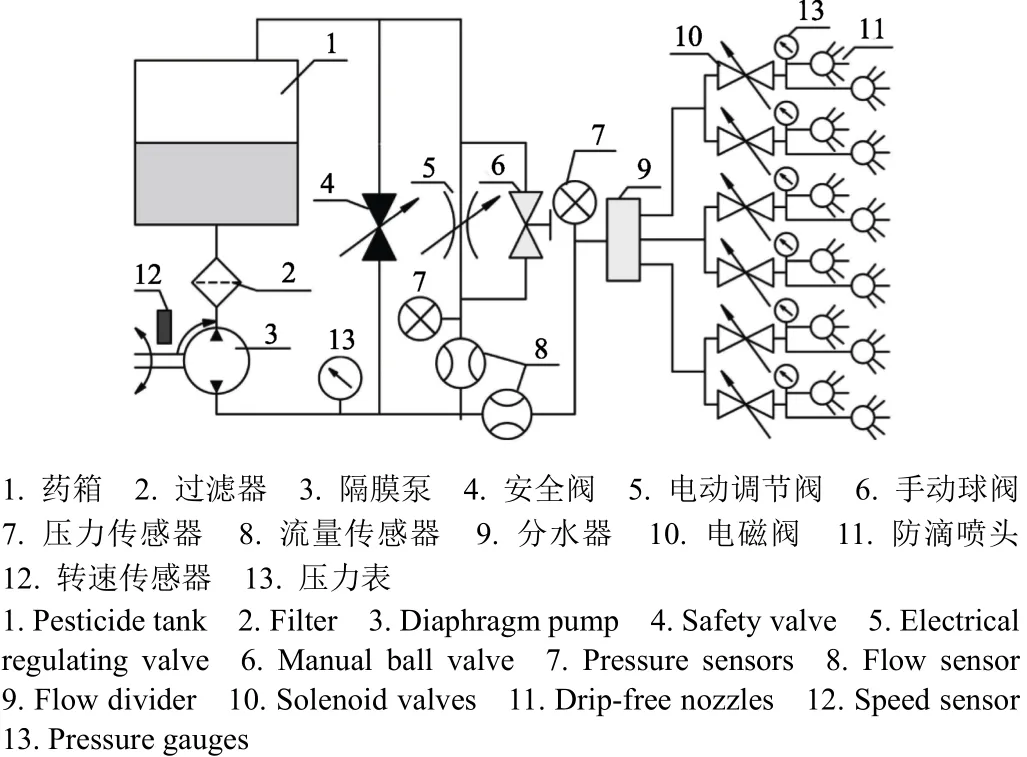
圖6 旁路節流式變量噴藥管路圖Fig.6 Bypass pipeline diagram of variable rate spraying system
噴藥前藥箱內配比農藥的方法使噴霧系統結構簡單,但也存在剩余藥液難以回收再利用、噴藥機藥箱和管道難以清洗等問題[77]。采用大水箱和小藥箱組合方式將水和藥分開存放,噴霧過程中通過藥泵將藥液注入或者吸入到噴霧管道或者噴頭混合腔中進行在線混合,可以通過改變藥泵流量進行實時調控噴藥量以解決上述問題[78-79]。楊洲等[80]設計了一款果園噴霧機在線混藥系統,其通過自吸藥泵將藥液吸入到管道中進行藥液混合,原理示意圖如圖 7所示。蔡祥等[81]在噴頭前安裝了藥液混合腔體,直接將藥液注入到每一個噴頭的混藥腔內進行藥液在線混合,使用電磁閥控制噴頭的藥液供給,該方法系統結構相對復雜,但其不僅能進行管道內藥量控制,也能實現單個噴頭藥量的獨立控制。Raven公司也開發了商業化直接注入系統 Sidekick Pro?[82],該系統在 John Deere公司多款商業化噴霧機R4030,R4038和R4045上得到了應用。
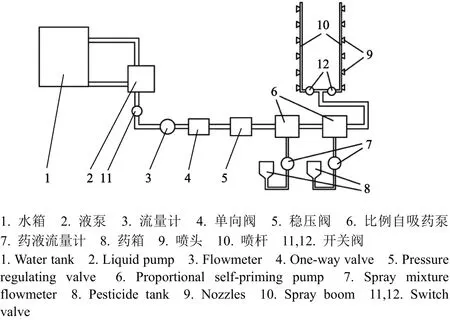
圖7 在線混藥噴霧系統原理示意圖Fig.7 Schematic diagram of online mixing and spraying system
2.2 噴頭藥量獨立控制方法
果園噴霧不同高度的藥量需求通常不盡相同,有時采用在不同高度布置不同流量的噴頭來實現,如果果樹形狀較為一致,該方法可以在一定程度上改善藥液在冠層上沉積分布。然而果園噴霧中,同一高度處不同位置藥量需求通常也是不同的,不同高度處的藥量比例也時刻發生著變化,僅通過在不同高度布置不同流量噴頭無法滿足精準噴霧的需求。基于該需求,噴頭流量的獨立控制方法近些年成了科研院所和跨國公司研究的熱點。
為了控制噴頭流量,可在噴頭前段增加一個比例閥,通過實時調節比例閥的開度調控噴頭流量。Deng等[83]使用法國Burkert公司6023型號電控比例調節閥和噴頭進行組合,采用PWM(pulse-width modulation)技術調節比例閥孔徑,進行變量噴霧試驗,發現該方法流量調節范圍大,但藥液的分布和噴霧角受流量影響很大。更多的研究者使用電磁閥和噴頭組合進行噴頭流量獨立控制,不僅可以根據靶標有無實時開啟和關閉噴頭,還可以采用PWM技術控制噴頭流量,該方法使用PWM波快速通斷電磁閥進行快速間歇式噴霧,其噴頭流量主要受噴霧壓力和 PWM 占空比影響,動態噴霧均勻性主要受PWM頻率影響。蔣煥煜等[84]采用分段直線擬合的方法建立了特定噴霧壓力下噴頭流量與占空比的函數關系;Zhai等[85]采用中心組合正交回歸試驗方法,建立了噴頭流量與噴霧壓力、PWM頻率和占空比之間的函數關系,這些方程的建立可為變量噴霧控制提供必需的數學方程支持。李龍龍等[86]研究發現 PWM 變量噴霧頻率越高,流量調節倍數越大,在30 Hz、0.5 Mpa工況下,流量調節倍數可達10倍;蔣煥煜等[87]試驗結果表明,PWM頻率越高,噴霧前進方向上的霧量分布均勻性越好。但是,PWM頻率越高,電磁閥的使用壽命會越短,由于受市場上電磁閥質量和使用壽命的影響,研究者多采用 10 Hz[85,88]甚至更低的PWM頻率[84,87]。美國John Deere 公司針對PWM噴霧電磁閥使用壽命和噴霧均勻性問題,研發了 ExactApply?噴頭流量獨立控制系統,該系統中所用噴頭的PWM頻率可達30 Hz,高頻率使噴霧更連續,噴霧壓力也更穩定[89]。針對單噴頭流量調節范圍有限的問題,徐艷蕾等[90]設計了多噴頭組合變量噴霧控制系統,其流量調節范圍得到了很大的提高,可為果園對靶變量噴霧系統設計提供參考。
2.3 小 結
果園噴霧藥量調控技術與方法在基礎研究和產品開發方面均取得了較多成果。其中管道總藥量控制方法在管道設計、混藥方式、藥液流量控制策略方面都得到了巨大的突破,也研發出了多款市場化噴霧控制系統和噴霧機產品。噴頭藥量獨立控制方法也開展了深入的研究,并取得了技術上的突破,產品化方面也取得了進展,正在朝著耐用實用化方向發展。
3 果園風送噴霧風力調控方法
果園風送噴霧果樹冠層內外沉積分布很大程度上取決于風送系統風力供給[91-92]。風力調控的重要性不亞于藥量調控,只有風力和藥量都得到精確控制,才能實現果園對靶精準噴霧。風送噴霧風力 3要素為風向、風速和風量,果園風送噴霧風力控制需要準確的方向、恰當的風速和適當的風量。風送方向需要和設定的噴霧方向一致,風速和風量需求方面不同果樹具有不同組合特點,比如枝葉稠密但體積較小的樹冠一般需要高風速低風量,而枝葉稀疏但體積較大的樹冠則需要低風速高風量。風力按需調控需要對風速和風量分別按需調控,需要在線探測計算果樹風速風量需求,實時控制風送執行機構供給合適的風力,使其經過輸送空間損失以后,以恰當的風力大小貫入果樹冠層中。目前風送噴霧風力調控方法相關研究主要集中于風速風量需求理論、風場與霧場分布建立方法和風力調節技術與裝置等[93-94]。
3.1 風速風量需求理論原則
要實現風速和風量調控,首先需要探測計算出風速風量需求量。早在2008年戴奮奮闡述了果樹風量需求“置換原則”和風速需求“末速度原則”,如圖8所示[95]。
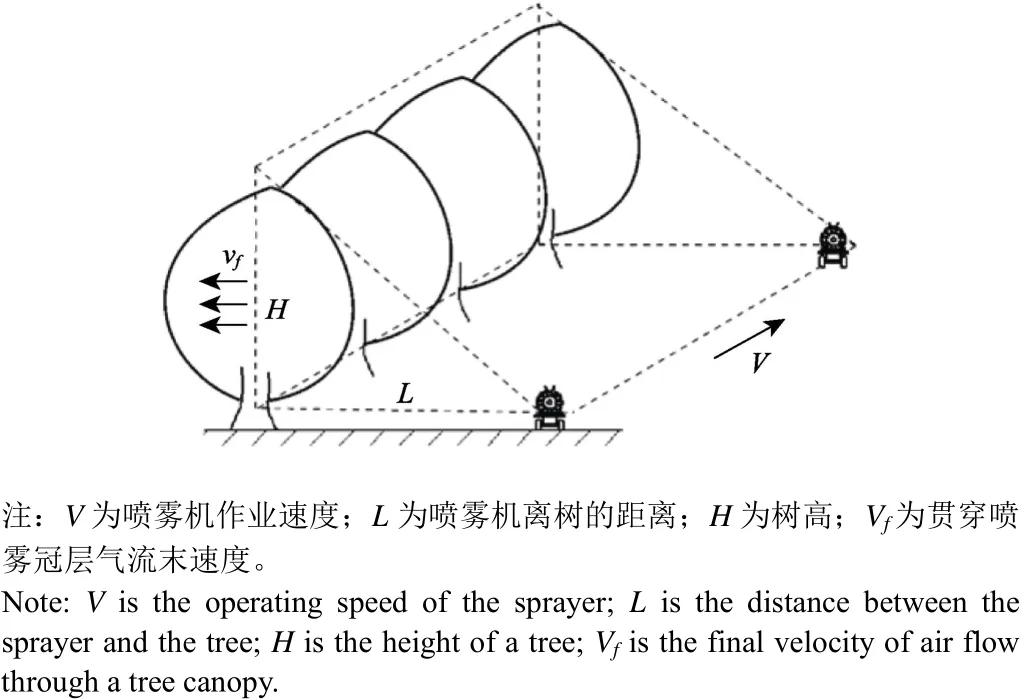
圖8 風送噴霧風量置換原則和末速度原則Fig.8 Principle of air volume displacement and air final velocity for orchard air-assisted spraying
根據“置換原則”,噴霧機風機吹出帶有霧滴的氣流,應能驅除并完全置換果樹冠層噴霧作業空間所包容的全部空氣,風機的風量需求可用公式(1)計算獲得。

式中Q為風送噴霧風量需求,m3/s;V為噴霧機作業速度,m/s;H為樹高,m;L為噴霧機離樹的距離,m; K為考慮到氣流沿途損失而確定的系數,K值的選取與氣溫、自然風速和風向、果園冠層枝葉稠密程度等有關。
“末速度原則”是指噴霧機氣流貫穿噴霧冠層時的末速度不能低于某一數值,也不能過高。末速度過低會導致冠層樹葉難以翻轉,藥液沉積率尤其是在葉片背面的沉降率會大大降低。末速度過高時氣流會帶著大量藥液霧滴沉降到噴霧冠層外面和果園地面上,造成環境污染和農藥浪費。應選擇氣流末速度使噴霧冠層出口處的氣流能夠持續翻轉樹葉以使藥液在葉片正反面均勻沉積且沉積量近似。
風量需求“置換原則”和風速需求“末速度原則”可以指導風送噴霧機研制,為其提供參數估算方法。邱威等在果園自走式風送噴霧機研制中,基于“置換原則”和“末速度原則”算出了風機風量需求,確定了風機功率、轉速或者葉片數量等參數,進而設計出了合理的風送系統[96-98],但該原則還不足以用于風送噴霧過程中風速風量需求分布實時計算以進行風力精準控制。“置換原則”風量需求計算中用系數 K調節氣溫、自然風速和風向、果園冠層枝葉稠密程度等因素對結果的影響,而該系數的影響因素太多,需要進一步深入研究,探尋主要影響因素及影響規律。“末速度原則”指出了末速度的基本要求,但用其指導計算噴霧機氣流速度控制還不夠,還需要研究末速度與果樹種類、枝葉特點和枝葉稠密程度的關系,研究氣流在空中和果樹冠層內損失特性和計算方法,進而為風送系統氣流速度需求計算和在線控制提供數學方程支持。
3.2 風場與霧場分布建模方法
風送噴霧風場建模研究主要包括計算流體力學(computational fluid dynamics,CFD)風場模擬和實驗室或者田間風場測量試驗建模研究。Dekeyser等[99]使用CFD仿真技術對風送噴霧機外部空間進行了風場模擬,并在實驗室條件下進行了測試和驗證,顯示CFD結果和測試結果吻合;Duga等[100]在模擬風場時還考慮了外部風力的影響;Garcia-Ramos等[101]進一步將風箱出口風速和總體風量輸出綜合考慮建模,如圖 9所示,并用三維風速傳感器進行了測量驗證,進一步說明了CFD方法的有效性。
丁天航等[102]對噴霧機風箱內部風場進行模擬,對外部風場測量驗證和分布規律開展研究;王景旭等[103]還進一步研究了噴霧靶標對風場和霧滴沉積的交互影響特性;陳建澤等[104]自制了風速測量定位網架,使用風速計測繪了遠射程風送式噴霧機氣流場分布,并測量研究了噴霧機的噴霧沉積特性;針對風場驗證測量費時費力的問題,李繼宇等[105]還使用風速傳感器陣列設計了風速快速測量系統。由風場建模研究現狀可知,CFD仿真技術結合專用風速測量系統實驗室或果園試驗,可為空間風場動態建模提供支持。
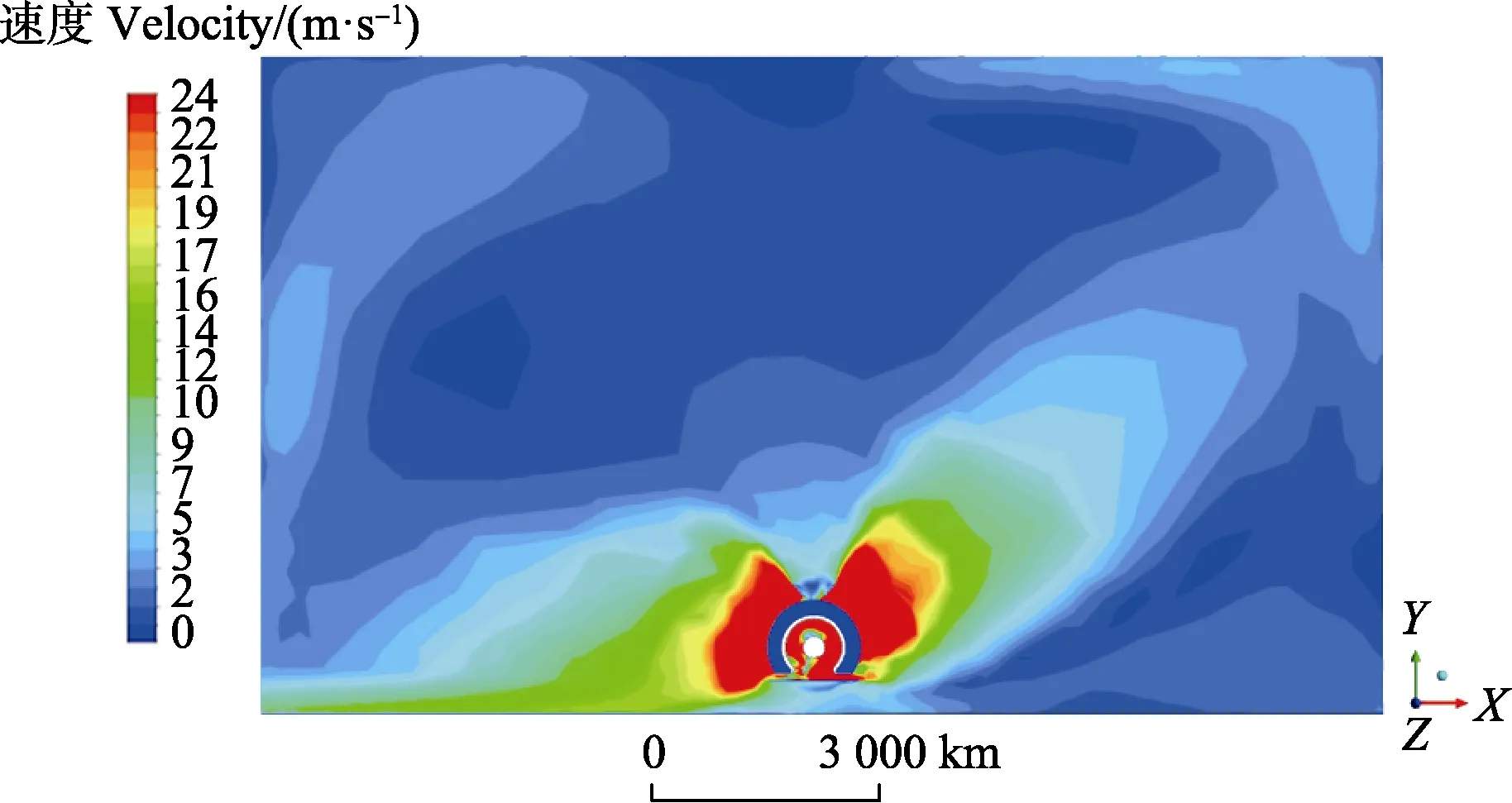
圖9 基于CFD進行噴霧機后端風速模擬Fig.9 Air velocity simulated with CFD in rear section of sprayer
3.3 風力調控方法與裝備
風送噴霧風力調控方法與裝備受到國內外研究者的廣泛關注。風力三要素中,風向的調控主要采用風箱的旋轉和導流板角度調節來實現[96,106-107],風送系統風速風量的控制主要通過改變風箱出風口面積、進風口面積和風機轉速等方法實現,通過調節風箱噴頭到噴霧靶標的距離也可以實現風力供給調控。邱威等[96]在風箱內部設置導風板和調風板以根據需求調節風箱內部和出口處氣流方向。Khot等[108]報道了一種降低果園風送噴霧飄移技術,該技術通過在普通風送噴霧機出風口增加遮擋板改變出風口面積以調節風送風力,如圖10所示,其為提高霧滴靶標內部沉積、降低飄移提供了一種新的方法和思路。Miranda-Fuentes等[109]通過改變風送系統風機轉速實現了風力的調節;Qiu等[110-111]采用改變風機轉速的方法改變風力供給,以研究風力對霧滴沉積和漂移的影響特性;翟長遠等[112]采用改變出風口面積、進風口面積[113]和風機轉速[114]方式設計了風力調控裝置和噴霧機;李龍龍等針對果園噴霧風量調節需求,設計了可以根據經驗參數公式調節風量的風送噴霧機[115];Osterman等[36]和周良富等[98]設計的果園風送噴霧機,雖然不改變風箱出口風力大小,但能夠移動風箱出口位置以調節噴霧靶標處風速風量大小。
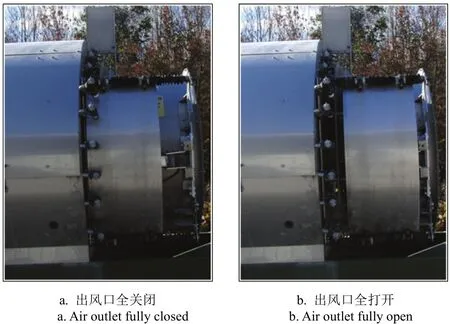
圖10 基于出風口面積變化調控風送氣流風速風量Fig.10 Air speed and volume control by adjusting air outlet area
目前研究者設計的風速風量調節裝置,大都為單一的調節結構,其優點是機械結構和調控系統均相對簡單,但存在的問題是風速和風量調節是相互耦合的,無法實現風速和風量的獨立控制。常見的 3種調節結構對風速和風量調節關系如表 2所示。從表中可以看出,單一的出風口面積調控方法,風速和風量變化方向相反;進風口面積調控方法和風機轉速調控方法,風速和風量成正比例關系。上述任一種單一的調控方法,風速和風量調節都存在耦合關系,該耦合關系不利于風力調控。比如在對靶噴霧過程中,探測出果樹樹冠特征發生了變化,冠層體積變小而枝葉變得更稠密,風送噴霧需要高風速低風量,需對風速和風量進行獨立控制。為了實現風速和風量獨立調控,未來需要研究單一方法的調控規律,并進一步研究2種或者多種方法組合的新的調控技術。
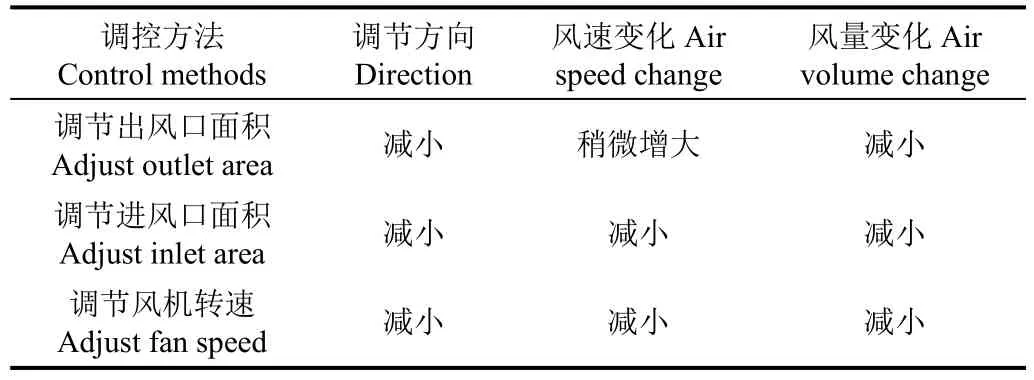
表2 風速風量調控方法及相互關系Table 2 Control methods of air speed, air volume and their relationships
3.4 小 結
國內外學者針對風送噴霧風力調控需要,開展了風速風量需求理論原則、風場霧場建模方法和風力調控技術等相關研究,取得了大量的成果,為研發具有智能風力調控的果園噴霧機提供了強有力的理論支持。但與藥量調控方法相比,該方面的研究還不夠深入,離實用化和產品化要求還有較大距離。風速風量需求理論原則還需要考慮靶標特征在內的多因素影響規律,風場霧場快速建模方法有待在果園實際應用中進一步優化完善,風速風量調控技術尚需研究風速風量去耦化方法,進而研發實用的風力調控裝備。
4 面臨的困難
果園靶標探測方法面臨的困難主要集中在靶標冠層枝葉稠密程度和病蟲害程度在線探測上。目前研究者雖然驗證了超聲波回波強度和枝葉稠密程度存在正相關關系,也在實驗室內建立了平面果園靶標超聲回波能量與冠層生物量密度之間的數學方程,但其能否用于果園在線探測還需要深入研究,模型普適性和穩定性也有待驗證。病蟲害程度在線探測面臨的困難更大,一直處于實驗室靜態測量階段其根本難題在于尚未成功探索出果園病蟲害的關鍵特征信息和與其對應的非接觸式快速感知方法。
果園噴施藥量調控面臨的困難主要集中于面向產品化的技術集成和優化,比如,管道總流量和噴頭流量集成控制,多噴頭組合控制方法優化,面向小規模果園變量控制方法低成本研究等。
果園風送噴霧風力調控方法面臨的困難主要集中于3個方面。首先,風速風量需求理論原則研究還有待深入,風量需求公式考慮的因子不夠全面,缺少冠層枝葉稠密度、自然風速風向等重要影響因子,風速需求原則中也缺少氣流在空中和果樹冠層內損失特性和計算方法描述,很難實際指導果園風力在線調節控制;其次,風場霧場建模方法還需要進一步研究其與果樹冠層枝葉動態交互影響特性,有待在果園實際應用中進一步優化完善;最后,風速風量調控之間存在耦合關系使一般的調控系統難以實現風速和風量的獨立調控,該耦合關系的解耦方法和對應的調控設備研發也是目前面臨的困難。
5 結 論
針對果園風送噴霧難以實現精準探測按需施藥,造成農藥浪費、果品安全生產和生態環境受到嚴重威脅這一世界性難題,各國根據各自的果園果樹特性,有針對性的開展了果園風送噴霧精準控制方法研究,主要成果如下:
1)果樹位置和冠層外形體積探測研究中,基于光學傳感器、超聲傳感器和激光雷達的多種探測方法都得到了田間應用試驗,樣機產品和商業化產品也得以開發。基于超聲傳感器、激光和微波雷達的冠層稠密程度探測方法在實驗室和果園試驗中得到了初步驗證。采用不同原理基于光譜、機器視覺和電子鼻等不同傳感器的病蟲害程度感知技術尚處于實驗室試驗階段。
2)管道總藥量控制方法研究中,噴藥管道設計及壓力、流量等關鍵參數實時監測技術設備已成熟;噴藥管道內和噴頭混合腔內兩種混藥方式都得到了應用;經典和現代控制策略的應用使藥液流量控制系統研發日趨成熟,多款噴霧控制系統和噴霧機產品相繼問世。基于PWM 技術的噴頭藥量獨立控制方法實現了技術突破和產品化研發,正朝著實用和耐用方向發展。
3)風送噴霧風速風量需求理論原則已經提出,在風量需求估算、噴霧機風箱研發等方面提供了初步理論參考;基于CFD的風場模擬方法的有效性在實驗室和田間試驗中得到了驗證,其有望助力風場霧場快速建模和風力損失規律研究;多種風力調控方法相繼出現,風力調控裝備樣機也得到研制,但調控手段相對單一尚難以實現風速和風量的獨立控制。
6 展 望
雖然已經取得了大量研究成果,但是目前果園噴霧技術和裝備與精準探測按需噴施的要求尚有較大差距,在果園靶標特征信息快速準確感知、噴霧藥量實時變量控制、風力供給之風向風速風量精確調控、以及上述 3者的同步協調集成等方面還亟待深入開展研究,關鍵研究點闡述如下:
1)冠層枝葉稠密程度和病蟲害程度在線探測
隨著果園靶標位置和外形輪廓等外部特征信息探測難題的突破,靶標內部枝葉稠密程度分布等研究將是未來的研究方向。首先需要繼續采用具有較多技術積累的已有方法,開展更深入的研究以實現技術突破。采用超聲回波能量分析方法,參考實驗室內建立的枝葉稠密程度探測模型,針對不同類型果園開展稠密程度模型普適性研究,通過果園應用試驗對探測模型和探測方法進行修正和優化,并進行探測系統產品化研發。基于激光雷達靶標內部結構感知和枝葉稠密度估算方法,開展海量點云數據的快速處理方法研究和田間作業系統快速性和穩定性驗證,進一步通過低成本設計實現探測系統產品化。此外,還需要結合超聲傳感器、激光雷達、微波雷達和機器視覺各自優點,采用多傳感器組合方式研究靶標冠層枝葉稠密程度探測方法,或者通過探尋靶標冠層稠密程度可感知物理新特征,創新性地開展新的非接觸式快速探測方法研究。
針對難以在線快速感知果園病蟲害特征信息以探測病蟲害發病程度這一根本難題,一方面需要從不同果樹類型和不同病蟲害特性出發,有針對性地探尋病蟲害關鍵特征信息,嘗試新的技術手段開展更深入研究,以探索病蟲害程度在線快速探測方法,另一方面需要將已有的靜態測量技術與基于處方的變量噴霧技術相結合,開展基于病蟲害分布地理信息按需變量噴霧技術應用研究。基于光譜和圖像技術的離線和在線探測方法研究與應用將是未來重要發展方向,果園病蟲害的關鍵特征信息探尋、探測手段的有效性、計算模型的高效性、系統的穩定性和普適性將是研究重點。離線病蟲害探測還需要基于電子鼻技術研究各種病害感知方法和快速估算模型,進一步針對特定病害特征研發簡易電子鼻系統以降低成本,提高監測密度和探測效率。
2)果園噴霧藥量調控方法與系統
噴霧管道總藥量控制方法和噴頭藥量獨立控制方法未來研究方向主要為技術集成和優化,包括管道總流量和噴頭流量集成控制,多噴頭組合控制方法優化,低成本變量控制系統集成,控制系統和控制執行機構的穩定性和耐用性優化提升。產品開發方面,國內企業和科研院所一方面需要通過研究國內果園的特點和國際跨國公司目前產品存在的問題,有針對性地開展關鍵系統開發,比如變量噴霧控制器、藥液直接注入系統、PWM噴頭流量獨立控制系統等,另一方面針對國內外市場需求,集成先進控制方法研發具有市場競爭力的藥量綜合調控系統和果園噴霧裝備。
3)果園風力需求理論與風力調控方法
果園風力需求理論原則作為風力調控方法研究的基礎,未來必須盡快實現突破,包括風量和風速需求理論原則2個方面。風量需求理論原則需要考慮果樹冠層枝葉稠密度等特征信息、自然風速和風向等更多影響因素,并通過多類型田間試驗進行驗證修正和完善。風速需求理論原則需要采用理論推導和試驗驗證相結合的方式構建,并通過各種果園田間應用進一步細化、總結和完善。
風送噴霧風力調控離不開風場與霧場分布建模,基于CFD的三維動態模型的準確、快速和高效構建有待進一步深入研究。基于風場和霧場模型,需要進一步開展風場霧場與噴霧距離、自然風力、噴霧機行進速度之間的數學關系,進而獲得風力動態損失模型,為計算風筒出口風力供給需求提供支持。針對風送噴霧風速、風量存在耦合關系的問題,深入研究風速和風量去耦化調控方法,通過研究不同調控機構的特性,研發支持風速風量去耦化控制的風力調控裝置,并通過果園試驗進一步進行優化設計和產品化開發,為風送噴霧風力按需調控提供控制設備支持,將是果園風送噴霧未來的研究發展趨勢。
4)精準噴霧系統集成研究與產品化開發
針對靶標探測、藥液變量控制和風力變量控制等子系統研究深度產品化水平不同的問題,分檔次分步驟開展系統集成和產品研發亟待開展。系統集成需要針對噴霧作業需求,由易到難逐步開展,比如可以首先集成靶標位置體積探測系統、藥量自動控制系統和風力手動調控系統,隨著研究的深入再對系統進行升級和優化,以逐步實現果園風送噴霧精準控制的目的。面向市場不同需求層次,根據科研單位和企業各自優勢,通過多層次合作,有針對性的集成開發出一系列商業化產品迫在眉睫。
[1] FAO. Minimum requirements for agricultural pesticide application equipment[R]. Rome: Food and Agriculture Organization of the United Nations, 2001.
[2] 李瀚哲,翟長遠,張波,等. 果園噴霧靶標探測技術現狀分析[J]. 農機化研究,2016(2):1-5.Li Hanzhe, Zhai Changyuan, Zhang Bo, et al. Status analysis of orchard spray target detection technology[J]. Journal of Agricultural Mechanization Research, 2016(2): 1-5. (in Chinese with English abstract)
[3] Gil E, Arnó J, Llorens J, et al. Advanced technologies for the improvement of spray application techniques in spanish viticulture: An overview[J]. Sensors, 2014, 14(1): 691-708.
[4] Lee W, Alchanatis V, Yang C, et al. Sensing technologies for precision specialty crop production[J]. Computers and Electronics in Agriculture, 2010, 74(8): 2-33.
[5] Rosell J, Sanz R. A review of methods and applications of the geometric characterization of tree crops in agricultural activities[J]. Computers and Electronics in Agriculture, 2012,81: 124-141.
[6] 周良富,薛新宇,周立新,等. 果園變量噴霧技術研究現狀與前景分析[J]. 農業工程學報,2017,33(23):80-92.Zhou Liangfu, Xue Xinyu, Zhou Lixin, et al. Research situation and progress analysis on orchard variable rate spraying technology[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2017, 33(23): 80-92. (in Chinese with English abstract)
[7] 鄒建軍,曾愛軍,何雄奎,等. 果園自動對靶噴霧機紅外探測控制系統的研制[J]. 農業工程學報,2007,23(1):129-132.Zou Jianjun, Zeng Aijun, He Xiongkui, et al. Research and development of infrared detection system for automatic target sprayer used in orchard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2007, 23(1): 129-132. (in Chinese with English abstract)
[8] 鄧巍,何雄奎,張錄達,等. 自動對靶噴霧靶標紅外探測研究[J]. 光譜學與光譜分析,2008,28(10):2285-2289.Deng Wei, He Xiongkui, Zhang Luda, et al. Target infrared detection in target spray. Spectroscopy and Spectral Analysis,2008, 28(10): 2285-2289. (in Chinese with English abstract)
[9] 李麗,李恒,何雄奎,等. 紅外靶標自動探測器的研制及試驗[J]. 農業工程學報,2012,28(12):159-163.Li Li, Li Heng, He Xiongkui, et al. Development and experiment of automatic detection device for infrared target[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(12): 159-163. (in Chinese with English abstract)
[10] 劉金龍,鄭澤鋒,丁為民,等. 對靶噴霧紅外探測器的設計與探測距離測試[J]. 江蘇農業科學,2013,41(7): 368-370.
[11] Giles D, Delwiche M, Dodd R. Sprayer control by sensing orchard crop characteristics: Orchard architecture and spray liquid savings[J]. Journal of Agricultural Engineering Research, 1989, 43: 271-289.
[12] Perez-Ruiz M, Aguera J, Gil J, et al. Optimization of agrochemical application in olive groves based on positioning sensor[J]. Precision Agriculture, 2011, 12(4): 564-575.
[13] 宋淑然,陳建澤,洪添勝,等. 果園柔性對靶噴霧裝置設計與試驗[J]. 農業工程學報,2015,31(10):57-63.Song Shuran, Chen Jianze, Hong Tiansheng, et al. Design and experiment of orchard flexible targeted spray device[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(10): 57-63. (in Chinese with English abstract)
[14] Miranda-Fuentes A, Rodríguez-Lizana A, Cuenca A, et al.Improving plant protection product applications in traditional and intensive olive orchards through the development of new prototype air-assisted sprayers[J]. Crop Protection, 2017, 94:44-58.
[15] 翟長遠,趙春江,王秀,等. 幼樹靶標探測器設計與試驗[J]. 農業工程學報,2012,28(2):18-22.Zhai Changyuan, Zhao Chunjiang, Wang Xiu, et al. Design and experiment of young tree target detector[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2012, 28(2): 18-22. (in Chinese with English abstract)
[16] Shalal N, Low T, Mccarthy C, et al. Orchard mapping and mobile robot localisation using on-board camera and laser scanner data fusion – Part A: Tree detection[J]. Computers and Electronics in Agriculture, 2015, 119: 254-266.
[17] Shalal N, Low T, Mccarthy C, et al. Orchard mapping and mobile robot localisation using on-board camera and laser scanner data fusion–Part B: Mapping and localization[J].Computers and Electronics in Agriculture, 2015, 119: 267-278.
[18] Zou W, Wang X, Deng W, et al. Design and Test of Automatic Toward-target Sprayer used in orchard[C]// Yu H.The 5th Annual IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems.Shenyang: IEEE, 2015: 697-702.
[19] Solanelles F, Escola A, Planas S, et al. An electronic control system for pesticide application proportional to the canopy width of tree crops[J]. Biosystems Engineering, 2006, 95:473-481.
[20] Brown D, Giles D, Oliver M, et al. Targeted spray technology to reduce pesticide in runoff from dormant orchards[J]. Crop Protection, 2008, 27: 545-552.
[21] Gil E, Escola A, Rosell J, et al. Variable rate application of plant protection products in vineyard using ultrasonic sensors[J]. Crop Protection, 2007, 26 (8): 1287-1297.
[22] 張霖,趙祚喜,俞龍,等. 超聲波果樹冠層測量定位算法與試驗[J]. 農業工程學報,2010,26(9):192-197.Zhang Lin, Zhao Zuoxi, Yu Long, et al. Positioning algorithm for ultrasonic scanning of fruit tree canopy and its tests[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(9): 192-197. (in Chinese with English abstract)
[23] 俞龍,洪添勝,趙祚喜,等. 基于超聲波的果樹冠層三維重構與體積測量[J]. 農業工程學報,2010,26(11):204-208.Yu Long, Hong Tiansheng, Zhao Zuoxi, et al. 3D-reconstruction and volume measurement of fruit tree canopy based on ultrasonic sensors[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(11): 204-208. (in Chinese with English abstract)
[24] Escolà A, Planas S, Rosell J R, et al. Performance of an ultrasonic ranging sensor in apple tree canopies[J]. Sensors(Basel), 2011, 11(3): 2459-2477.
[25] Jeon H, Zhu H, Derksen R, et al. Evaluation of ultrasonic sensor for variable-rate spray applications[J]. Computers and Electronics in Agriculture, 2011, 75: 213-221.
[26] Zhai C, Wang X, Zhao C, et al. Orchard tree structure digital test system and its application[J]. Mathematical and Computer Modelling, 2011, 54: 1145-1150.
[27] 翟長遠,趙春江,王秀,等. 樹型噴灑靶標外形輪廓探測方法[J]. 農業工程學報,2010,26(12):173-177.Zhai Changyuan, Zhao Chunjiang, Wang Xiu, et al. Probing method of tree spray target profile[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(12): 173-177. (in Chinese with English abstract)
[28] Zhai C, Wang X, Guo J, et al. Influence of velocity on ultrasonic probing of orchard tree profile[J]. Sensor Letters,2013, 11: 1062-1068.
[29] Maghsoudi H, Minaei S, Ghobadian B, et al. Ultrasonic sensing of pistachio canopy for low-volume precision spraying[J]. Computers and Electronics in Agriculture. 2015,112: 149-160.
[30] Llorens J, Gil E, Llop J, et al. Ultrasonic and LIDAR sensors for electronic canopy characterization in vineyards: Advances to improve pesticide application methods[J]. Sensors, 2011,11(2): 2177-2194.
[31] 劉慧,李寧,沈躍,等. 模擬復雜地形的噴霧靶標激光檢測與三維重構[J]. 農業工程學報,2016,32(18):84-91.Liu Hui, Li Ning, Shen Yue, et al. Spray target laser scanning detection and three-dimensional reconstruction under simulated complex terrain[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(18): 84-91. (in Chinese with English abstract)
[32] 郭彩玲,宗澤,張雪,等. 基于三維點云數據的蘋果樹冠層幾何參數獲取[J]. 農業工程學報,2017,33(3):175-181.Guo Cailing, Zong Ze, Zhang Xue, et al. Apple tree canopy geometric parameters acquirement based on 3D point clouds[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(3): 175-181. (in Chinese with English abstract)
[33] 俞龍,黃健,趙祚喜,等. 丘陵山地果樹冠層體積激光測量方法與實驗[J]. 農業機械學報,2013,44(8):224-228.Yu Long, Huang Jian, Zhao Zuoxi, et al. Laser measurement and experiment of hilly fruit tree canopy volume[J].Transaction of the Chinese Society for Agricultural Machinery, 2013, 44(8): 224-228. (in Chinese with English abstract)
[34] Liu H, Zhu H. Evaluation of a laser scanning sensor in detection of complex-shaped targets for variable-rate sprayer development[J]. Transactions of the ASABE, 2016, 59: 1181-1192.
[35] 李秋潔,鄭加強,周宏平,等. 基于車載二維激光掃描的樹冠體積在線測量[J]. 農業機械學報,2016,47(12):309-314.Li Qiujie, Zheng Jiaqiang, Zhou Hongping, et al. Online measurement of tree canopy volume using vehicle-borne 2-D laser scanning[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(12): 309-314. (in Chinese with English abstract)
[36] Osterman A, Gode?a T, Ho?evar M, et al. Real-Time positioning algorithm for variable-geometry air-assisted orchard sprayer[J]. Computers and Electronics in Agriculture,2013, 98: 175-182.
[37] Miranda-Fuentes A, Llorens J, Gamarra-Diezma J, et al.Towards an optimized method of olive tree crown volume measurement[J]. Sensors (Switzerland), 2015, 15(2): 3672-3687.
[38] 丁為民,趙思琪,趙三琴,等. 基于機器視覺的果樹樹冠體積測量方法研究[J]. 農業機械學報,2016,47(6):1-10, 20.Ding Weimin, Zhao Siqi, Zhao Sanqin, et al. Measurement methods of fruit tree canopy volume based on machine vision[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(6): 1-10, 20. (in Chinese with English abstract)
[39] Sanz-Cortiella R, Llorens-Calveras J, Escolà A, et al.Innovative LIDAR 3D dynamic measurement system to estimate fruit-tree leaf area[J]. Sensors (Basel), 2011, 11(6):5769-5791.
[40] Sanz R, Rosell J, Llorens J, et al. Relationship between tree row LIDAR-volume and leaf area density for fruit orchards and vineyards obtained with a LIDAR 3D dynamic measurement system[J]. Agricultural and Forest Meteorology,2013, 171/172: 153-162.
[41] Llop J, Gil E, Llorens J, et al. Testing the Suitability of a Terrestrial 2D LiDAR Scanner for Canopy Characterization of Greenhouse Tomato Crops[J]. Sensors, 2016, 16(9): 1435.doi: 10.3390/s16091435.
[42] Palleja T, Landers A. Real time canopy density estimation using ultrasonic envelope signals in the orchard and vineyard[J]. Computers and Electronics in Agriculture, 2015,115: 108-117.
[43] Palleja T, Landers A. Real time canopy density validation using ultrasonic envelope signals and point quadrat analysis[J]. Computers and Electronics in Agriculture, 2017,134: 43-50.
[44] Li H, Zhai C, Weckler P, et al. A canopy density model for planar orchard target detection based on ultrasonic sensors[J].Sensors, 2017, 17(1): 31. doi: 10.3390/s17010031.
[45] 丁為民, 傅錫敏, 孫國祥,等. 果樹仿形精量噴霧機車:中國專利,200910312649[P],2011-11-16.
[46] Saponari M, Manjunath K, Yokomi R. Quantitative detection of Citrus tristeza virus in citrus and aphids by real-time reverse transcription-PCR[J]. Journal of Virological Methods,2008, 147 (1): 43-53.
[47] Yvon M, Thébaud G, Alary R, et al. Specific detection and quantification of the phytopathogenic agent ‘Candidatus Phytoplasma prunorum[J]. Molecular and Cellular Probes,2009, 23(5): 227-234.
[48] Sankaran S, Mishra A, Ehsani R, et al. A review of advanced techniques for detecting plant diseases[J]. Computers and Electronics in Agriculture, 2010, 72(1): 1-13.
[49] 謝春燕,吳達科,王朝勇,等. 基于圖像和光譜信息融合的病蟲害葉片檢測系統[J]. 農業機械學報,2013,44(增刊1):269-272.Xie Chunyan, Wu Dake, Wang Chaoyong, et al. Insect pest leaf detection system based on information fusion of image and spectrum[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp.1): 269-272. (in Chinese with English abstract)
[50] 譚文學,趙春江,吳華瑞,等. 基于彈性動量深度學習神經網絡的果體病理圖像識別[J]. 農業機械學報,2015,46(1):20-25.Tan Wenxue, Zhao Chunjiang, Wu Huarui, et al. A deep learning network for recognizing fruit pathologic images based on flexible momentum[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(1): 20-25. (in Chinese with English abstract)
[51] 趙瑤池,胡祝華,白勇,等.基于紋理差異度引導的DRLSE病蟲害圖像精準分割方法[J]. 農業機械學報,2015,46(2):14-19.Zhao Yaochi, Hu Zhuhua, Bai Yong, et al. An accurate segmentation approach for disease and pest based on texture difference guided DRLSE[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(2): 14-19. (in Chinese with English abstract)
[52] Naidu R, Perry E, Pierce F, et al. The potential of spectral reflectance technique for the detection of Grapevine leafroll-associated virus-3 in two red-berried wine grape cultivars[J]. Computers and Electronics in Agriculture, 2009,66: 38-45.
[53] 肖德琴,傅俊謙,鄧曉暉,等. 基于物聯網的桔小實蠅誘捕監測裝備設計及試驗[J]. 農業工程學報,2015,31(7):166-172.Xiao Deqin, Fu Junqian, Deng Xiaohui, et al. Design and test of remote monitoring equipment for bactrocera dorsalis trapping based on internet of things[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(7): 166-172. (in Chinese with English abstract)
[54] Lenk S, Chaerle L, Pfündel E, et al. Multispectral fluorescence and reflectance imaging at the leaf level and its possible applications[J]. Journal of Experimental Botany,2007, 58 (4): 807-814.
[55] Qin J, Burks T, Ritenour M, et al. Detection of citrus canker using hyperspectral reflectance imaging with spectral information divergence[J]. Journal of Food Engineering,2009, 93 (2): 183-191.
[56] Shafri H, Hamdan N. Hyperspectral imagery for mapping disease infection in oil palm plantation using vegetation indices and red edge techniques[J]. American Journal of Applied Sciences, 2009, 6 (6): 1031-1035.
[57] Purcell D, O’Shea M, Johnson R, et al. Near-infrared spectroscopy for the prediction of disease rating for Fiji leaf gall in sugarcane clones[J]. Applied Spectroscopy, 2009, 63(4): 450-457
[58] Belasque L, Gasparoto M, Marcassa L. Detection of mechanical and disease stresses in citrus plants by fluorescence spectroscopy[J]. Applied Optics, 2008, 47 (11):1922-1926.
[59] Choi Y, Tapias E, Kim H, et al. Metabolic discrimination of Catharanthus roseus leaves infected by phytoplasma using 1H-NMR spectroscopy and multivariate data analysis[J].Plant Physiology, 2004, 135: 2398-2410.
[60] 李震,鄧忠易,洪添勝,等. 基于神經網絡的實蠅成蟲圖像識別算法[J]. 農業機械學報,2017,48(增刊1):129-135.Li Zhen, Deng Zhongyi, Hong Tiansheng, et al. Image recognition algorithm for fruit flies based on BP neural network[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(Supp.1): 129-135. (in Chinese with English abstract)
[61] Singh V, Misra A. Detection of plant leaf diseases using image segmentation and soft computing techniques[J].Information Processing in Agriculture, 2017, 4(1): 41-49.
[62] Gao D, Liu F, Wang J. Quantitative analysis of multiple kinds of volatile organic compounds using hierarchical models with an electronic nose[J]. Sensors and Actuators B:Chemical, 2012, 161(1): 578-586.
[63] Li C, Krewer G, Kays S. Blueberry postharvest disease detection using an electronic nose[C]// Dooley J. ASABE Annual International Meeting. Reno: ASABE, 2009:096783.[64] Laothawornkitkul J, Moore J, Taylor J, et al. Discrimination of plant volatile signatures by an electronic nose: a potential technology for plant pest and disease monitoring[J]. Environmental Science and Technology, 2008, 42: 8433-8439.
[65] 邱白晶,閆潤,馬靖,等. 變量噴霧技術研究進展分析[J].農業機械學報,2015,46(3):59-72.Qiu Baijing, Yan Run, Ma Jing, et al. Research progress analysis of variable rate sprayer technology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015,46(3): 59-72. (in Chinese with English abstract)
[66] Solanellesl F, Escola A, Planas S, et al. An electronic control system for pesticide application proportional to the canopy width of tree crops[J]. Biosystems Engineering, 2006, 95(4):473-481
[67] 王利霞,張書慧,馬成林,等. 基于ARM 的變量噴藥控制系統設計[J]. 農業工程學報,2010,26(4):113-118.Wang Lixia, Zhang Shuhui, Ma Chenglin, et al. Design of variable spraying system based on ARM[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2010, 26(4): 113-118. (in Chinese with English abstract)
[68] Gonzalez R, Pawlowski A, Rodriguez C, et al. Design and implementation of an automatic pressure-control system for a mobile sprayer for greenhouse applications[J]. Spanish Journal of Agricultural research, 2012, 10(4): 939-949.
[69] 黃勝,朱瑞祥,王艷芳,等. 變量施藥機的恒壓變量控制系統設計及算法[J]. 農機化研究,2011(2):19-22.Huang Sheng, Zhu Ruixiang, Wang Yanfang,et al. Design and algorithm of constant pressure and variable flow control system of variable pesticide application machine[J]. Journal of Agricultural Mechanization Research, 2011(2): 19-22.(in Chinese with English abstract)
[70] Berk P, Stajnko D, Lakota M, et al. Real time fuzzy logic system for continuous control solenoid valve in the process of applying the plant protection product[J]. Journal of Agricultural Engineering, 2015, 15(1): 1-9.
[71] 劉志壯,洪添勝,張文昭,等. 機電式流量閥的模糊控制實現與測試[J]. 農業工程學報,2010,26(增刊1):22-26.Liu Zhizhuang, Hong Tiansheng, Zhang Wenzhao, et al.Fuzzy control implementing and testing on electromechanical flow valve[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010,26(Supp.1): 22-26. (in Chinese with English abstract)
[72] 宋樂鵬,董志明,向李娟,等. 變量噴霧流量閥的變論域自適應模糊PID 控制[J]. 農業工程學報,2010,26(11):114-118.Song Lepeng, Dong Zhiming, Xiang Lijuan, et al. Variable universe adaptive fuzzy PID control of spray flow valve[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(11): 114-118. (in Chinese with English abstract)
[73] 陳樹人,尹東富,魏新華,等. 變量噴藥自適應神經模糊控制器設計與仿真[J]. 排灌機械工程學報,2011,29(3):272-276.Chen Shuren, Yin Dongfu, Wei Xinhua, et al. Design and simulation of variable weed spraying controller based on adaptive neural fuzzy inference system[J]. Journal of Drainage and Irrigation Machinery Engineering, 2011, 29(3):272-276. (in Chinese with English abstract)
[74] 郭娜,胡靜濤. 基于 Smith-模糊 PID 控制的變量噴藥系統設計及試驗[J]. 農業工程學報,2014,30(8):56-64.Guo Na, Hu Jingtao. Design and experiment of variable rate spaying system on Smith-Fuzzy PID control[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2014, 30(8): 56-64. (in Chinese with English abstract)
[75] Raven Industries Inc. SCS control consoles[Z/OL].2018-02-16.https://ravenprecision.com/products/application-controls/cont rol-consoles.
[76] Micro-Trak Systems Inc. SpraymateTMII[Z/OL]. 2018-02-16.https://micro-trak.com/spraymate-ii.
[77] Shen Y, Zhu H. Embedded computer-controlled premixing inline injection system for air-assisted variable-rate sprayers[J]. Transactions of the ASABE, 2015, 58: 39-46.
[78] 張文昭,劉志壯. 3WY-A3 型噴霧機變量噴霧實時混藥控制試驗[J]. 農業工程學報,2011,27(11):130-133.Zhang Wenzhao, Liu Zhizhuang. Experiment on variable rate spray with real-time mixing pesticide of 3WY-A3 sprayer[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(11): 130-133. (in Chinese with English abstract)
[79] 胡開群,周舟,祁力鈞,等. 直注式變量噴霧機設計與噴霧性能試驗[J]. 農業機械學報,2010,41(6):70-74,102.Hu Kaiqun, Zhou Zhou, Qi Lijun, et al. Spraying performance of the direct injection variable-rate sprayer[J].Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(6): 70-74, 102. (in Chinese with English abstract)
[80] 楊洲,牛萌萌,李 君,等. 果園在線混藥型靜電噴霧機的設計與試驗[J]. 農業工程學報,2015,31(21):60-67.Yang Zhou, Niu Mengmeng, Li Jun, et al. Design and experiment of an electrostatic sprayer with on-line mixing system for orchard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015,31(21): 60-67. (in Chinese with English abstract)
[81] 蔡祥,Walgenbach M, Doerpmund M, 等. 基于電磁閥的噴嘴直接注入式農藥噴灑系統[J]. 農業機械學報,2013,44(6):69-72.Cai Xiang, Walgenbach M, Doerpmund M, et al. Direct nozzle injection sprayer based on electromagnetic-force valve[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(6): 69-72. (in Chinese with English abstract)
[82] Raven Industries Inc. Sidekick proTMdirect injection[Z/OL].2018-02-16. https://ravenprecision.com/products/applicationcontrols/sidekick-pro-direct-injection
[83] Deng Wei, He Xiongkui, Ding Weimin. Droplet size and spray pattern characteristics of PWM-based continuous variable spray[J]. International Journal of Agricultural and Biological Engineering, 2009, 2(1): 8-18.
[84] 蔣煥煜,周鳴川,童俊華,等. 基于卡爾曼濾波的PWM變量噴霧控制研究[J]. 農業機械學報,2014,45(10):60-65.Jiang Huanyu, Zhou Mingchuan, Tong Junhua, et al. PWM variable spray control based on Kalman filter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014,5(10): 60-65. (in Chinese with English abstract)
[85] Zhai C, Wang X, Liu D, et al. Nozzle flow model of high pressure variable-rate spraying based on PWM technology[J].Advanced Materials Research, 2012, 422: 208-217.
[86] 李龍龍,何雄奎,宋堅利,等. 基于高頻電磁閥的脈寬調制變量噴頭噴霧特性[J]. 農業工程學報,2016,32(1):97-103.Li Longlong, He Xiongkui, Song jianli, et al. Spray characteristics on pulse-width modulation variable application based on high frequency electromagnetic valve[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(1): 97-103. (in Chinese with English abstract)
[87] 蔣煥煜,張利君,劉光遠,等. 基于PWM變量噴霧的單噴頭動態霧量分布均勻性實驗[J]. 農業機械學報,2017,48(4):41-46.Jiang Huanyu, Zhang Lijun, Liu Guangyuan, et al.Experiment on dynamic spray deposition uniformity for PWM variable spray of single nozzle[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(4): 41-46. (in Chinese with English abstract)
[88] Liu H, Zhu H, Shen Y, et al. Development of digital flow control system for copy multi-channel variable-rate sprayers[J].Transactions of the ASABE, 2014, 57(1): 273-281.
[89] John Deere Company. ExactApplyTMnozzle control system[Z/OL]. 2018-02-16. https://www.deere.com/en_US/products/equipment/self_propelled_sprayers/exact-apply/exa ct-apply.page
[90] 徐艷蕾,包佳林,付大平,等. 多噴頭組合變量噴藥系統的設計與試驗[J]. 農業工程學報,2016,32(17):47-54.Xu Yanlei, Bao Jialin, Fu Daping, et al. Design and experiment of variable spraying system based on multiple combined nozzles[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016,32(17): 47-54. (in Chinese with English abstract)
[91] Pai N, Salyani M, Sweeb R. Regulating airflow of orchard air-blast sprayer based on tree foliage density[J].Transactions of the ASABE, 2009, 52 (5): 1423-1428.
[92] 呂曉蘭,傅錫敏,吳萍,等. 噴霧技術參數對霧滴沉積分布影響試驗[J]. 農業機械學報,2011,42(6):70-75.Lv Xiaolan, Fu Ximin, Wu Ping, et al. Influence of spray operating parameters on droplet deposition[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011,42(6): 70-75. (in Chinese with English abstract)
[93] 邱威,丁為民,傅錫敏,等. 果園噴霧機圓環雙流道風機的設計與試驗[J]. 農業工程學報,2012,28(12):3-17.Qiu Wei, Ding Weimin, Fu Ximin, et al. Design and experiment of ring double-channel fan for spraying machine in orchard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012,28(12): 3-17. (in Chinese with English abstract)
[94] 李超,張曉輝,姜建輝,等. 葡萄園立管風送式噴霧機的研制與試驗[J]. 農業工程學報,2013,29(4):71-78.Li Chao, Zhang Xiaohui, Jiang Jianhui, et al. Development and experiment of riser air-blowing sprayer in vineyard[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(4): 71-78. (in Chinese with English abstract)
[95] 戴奮奮. 風送噴霧機風量的選擇與計算[J]. 植物保護,2008,34(6):124-127.Dai Fenfen. Selection and calculation of the blowing rate of air assisted sprayers[J]. Plant Protection, 2008, 34(6): 124-127. (in Chinese with English abstract)
[96] 邱威,丁為民,汪小旵,等. 3WZ-700型自走式果園風送定向噴霧機[J]. 農業機械學報,2012,43(4):26-30,44.Qiu Wei, Ding Weimin, Wang Xiaochan, et al. 3WZ-700 self-propelled air-blowing orchard sprayer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(4):26-30, 44. (in Chinese with English abstract)
[97] 丁素明,傅錫敏,薛新宇,等. 低矮果園自走式風送噴霧機研制與試驗[J]. 農業工程學報,2013,29(15):18-25.Ding Suming, Fu Ximin, Xue Xinyu, et al. Design and experiment of self-propelled air-assisted sprayer in orchard with dwarf culture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013,29(15): 18-25. (in Chinese with English abstract)
[98] 周良富,傅錫敏,丁為民,等. 組合圓盤式果園風送噴霧機設計與試驗[J]. 農業工程學報,2015,31(10):64-71.Zhou Liangfu, Fu Ximin, Ding Weimin, et al. Design and experiment of combined disc air-assisted orchard sprayer[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(10): 64-71. (in Chinese with English abstract)
[99] Dekeyser D, Duga A, Verboven P, et al. Assessment of orchard sprayers using laboratory experiments and computational fluid dynamics modelling[J]. Biosystems Engineering, 2013, 114: 157-169.
[100] Duga A, Ruysen K, Dekeyser D, et al. CFD based analysis of the effect of wind in orchard spraying[J]. Chemical Engineering Transactions, 2015, 44: 1-6.
[101] Garcia-Ramos F, Malon H, Aguirre A, et al. Validation of a CFD model by using 3D sonic anemometers to analyse the air velocity generated by an air-assisted sprayer equipped with two axial fans[J]. Sensors (Switzerland), 2015, 15(2):2399-2418.
[102] 丁天航,曹曙明,薛新宇,等. 果園噴霧機單雙風機風道氣流場仿真與試驗[J]. 農業工程學報,2016,32(14):62-68.Ding Tianhang, Cao Shuming, Xue Xinyu, et al. Simulation and experiment on single-channel and double-channel airflow field of orchard sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(14): 62-68. (in Chinese with English abstract)
[103] 王景旭,祁力鈞,夏前錦. 靶標周圍流場對風送噴霧霧滴沉積影響的 CFD模擬及驗證[J]. 農業工程學報,2015,31(11):46-53.Wang Jingxu, Qi Lijun, Xia Qianjin. CFD simulation and validation of trajectory and deposition behavior of droplets around target affected by air flow field in greenhouse[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(11): 46-53. (in Chinese with English abstract)
[104] 陳建澤,宋淑然,孫道宗,等. 遠射程風送式噴霧機氣流場分布及噴霧特性試驗[J]. 農業工程學報,2017,33(24):72-79.Chen Jianze, Song Shuran, Sun Daozong, et al. Test on airflow field and spray characteristics for long-range air-blast sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017,33(24): 72-79. (in Chinese with English abstract)
[105] 李繼宇,周志艷,蘭玉彬,等. 旋翼式無人機授粉作業冠層風場分布規律[J]. 農業工程學報,2015,31(3):77-86.Li Jiyu, Zhou Zhiyan, Lan Yubin, et al. Distribution of canopy wind field produced by rotor unmanned aerial vehicle pollination operation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2015, 31(3): 77-86. (in Chinese with English abstract)
[106] 徐莎,翟長遠,朱瑞祥,等. 噴霧高度可調的果園風送噴霧機的設計[J]. 西北農林科技大學學報(自然科學版),2013,41(11):1-6.Xu Sha, Zhai Changyuan, Zhu Ruixiang, et al. Design of an orchard air-assisted sprayer with adjustable spray height[J].Journal of Northwest A&F University (Natural Science Edition), 2013, 41(11): 1-6. (in Chinese with English abstract)
[107] 宋淑然,夏侯炳,盧玉華,等. 風送式噴霧機導流器結構優化及試驗研究[J]. 農業工程學報,2012,28(6):7-12.Song Shuran, Xia Houbing, Lu Yuhua, et al. Structural optimization and experiment on fluid director of air-assisted sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012,28(6): 7-12. (in Chinese with English abstract)
[108] Khot L, Ehsani R, Albrigo G, et al. Spray pattern investigation of an axial-fan airblast precision sprayer using a modified vertical patternator[J]. Applied Engineering in Agriculture. 2012, 28: 647-654.
[109] Miranda-Fuentes A, Rodríguez-Lizana A, Gil E, et al.Influence of liquid-volume and airflow rates on spray application quality and homogeneity in super-intensive olive tree canopies[J]. Science of the Total Environment, 2015,537: 250-259.
[110] Qiu W, Zhao S, Ding W, et al. Effects of fan speed on spray deposition and drift for targeting air-assisted sprayer in pear orchard[J]. International Journal of Agricultural and Biological Engineering, 2016, 9: 53-62.
[111] 宋淑然,洪添勝,孫道宗,等. 風機電源頻率對風送式噴霧機噴霧沉積的影響[J]. 農業工程學報,2011,27(1):153-159.Song Shuran, Hong Tiansheng, Sun Daozong, et al. Effect of fan power supply frequency on deposition of air-assisted sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011,27(1): 153-159. (in Chinese with English abstract)
[112] 翟長遠,朱瑞祥,徐莎,等. 一種風送式噴霧機風量調節裝置:中國專利,201210545679.3[P],2014-09-10.
[113] 翟長遠,李衛,郭俊杰,等. 一種風送式噴霧機進風口調節裝置:中國專利,201210545208.2[P],2014-07-30.
[114] 翟長遠,朱瑞祥,李衛,等. 一種風機轉速可控式果園噴藥機:中國專利,201210549173.X[P],2014-07-30.
[115] 李龍龍,何雄奎,宋堅利,等. 基于變量噴霧的果園自動仿形噴霧機的設計與試驗[J]. 農業工程學報,2017,33(1):70-76.Li Longlong, He Xiongkui, Song Jianli, et al. Design and experiment of automatic profiling orchard sprayer based on variable air volume and flow rate[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(1): 70-76. (in Chinese with English abstract)
猜你喜歡
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
兒童故事畫報(2019年5期)2019-05-26 14:26:14
西南交通大學學報(2016年4期)2016-06-15 20:29:37
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15
