永磁伺服系統三閉環調節器的設計
2018-05-31 09:05:27李長兵
機電信息 2018年15期
關鍵詞:結構
李長兵
(廣州數控設備有限公司,廣東廣州510006)
0 引言
在設計永磁伺服系統三閉環控制器時,設計電流環的主要目標是電流環的響應速度,對電網電壓的抗干擾作用是次要的[1],因此電流環常采用PI控制。轉速環需要對負載變化起抗擾作用,同時還要兼顧轉速環的響應性能[2]。由于位置環的特殊性,不能出現超調,故一般采用單純的比例控制[3]。
本文介紹了伺服系統三閉環控制器的模型,然后針對轉速的抗擾性能和響應速度,介紹了三種不同的轉速環控制器,通過對比分析了各自的優缺點。在實際生產過程中,可以選擇不同的控制器來解決伺服系統響應速度與抗擾性的問題,使伺服控制系統滿足生產生活控制的要求。
1 伺服系統三閉環模型
永磁伺服系統由內到外分別為電流環、速度環、位置環,其簡化的結構框圖如圖1所示。

圖1 永磁伺服系統結構框圖
圖中,β、α分別為電流環和速度環的反饋系數;θref、θ為給定轉角和實際轉角;APR為位置調節器;ωref、ω為給定轉速和實際轉速;ASR為速度環調節器;Ton、Toi分別為速度環、電流環的濾波時間常數;iqref、iq為給定電流和實際電流;ACR為電流環PI調節器;Ts為逆變器的失控時間;Tl為電磁時間常數;Kt、Ce分別為電磁轉矩系數和反電動勢系數;TL為負載轉矩;J為轉動慣量。
2 永磁伺服系統三閉環控制器的設計
2.1 電流控制器
不考慮反電動勢的影響,電流環結構原理圖如圖2所示。

圖2 電流環結構原理圖
需要注意的是,電流中的諧波分量主要來源于SVPWM逆變器,諧波主要集中在采樣頻率fΔ及fΔ的整數倍附近,所以電流濾波時間常數Toi通常選擇為,其中fΔ為采樣頻率。考慮到電流環的快速響應特性,將調節器的零點和對象中的大的時間常數極點Tl相抵消,即可求得電流控制器的PI參數。
2.2 轉速控制器
由于傳統的PI調節器存在超調大、抗擾性較差等缺點,本文采用了IP調節器,其原理圖如圖3所示。
從控制框圖中可以看出,積分環節保證了系統閉環響應時沒有穩態誤差,同時避免了微分突變的影響。IP形式的轉速調節器是通過犧牲系統的快速性能來提高系統抗擾性能。
速度環采用PI控制器時,調整時間較IP快,但超調較大;雖然速度環采用IP控制器的超調較小,但調整時間較長。為了結合二者的優點,速度控制器可采用PDFF速度控制器,其控制框圖如圖4所示,圖中Td為輸入的擾動信號。
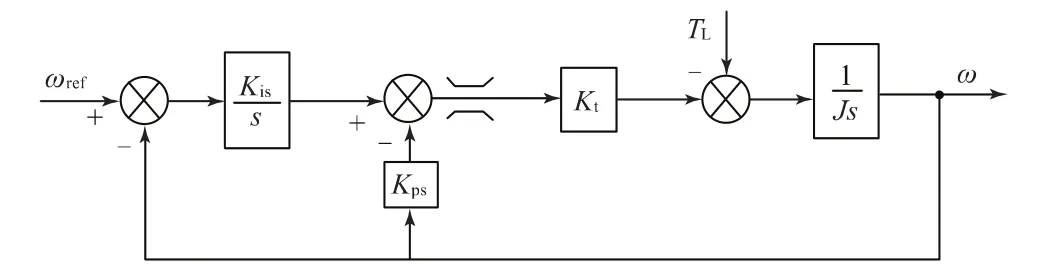
圖3 IP結構轉速調節器原理圖
PDFF控制器是一種較靈活的速度環控制器,當改變PDFF控制器參數Kvi、Kvp、γ的值時,將構成不同的速度環控制器。當γ=0時,PDFF結構就變成了IP控制器的結構;當γ=1時,控制器類似PI結構;其還可以構成前饋控制器等。
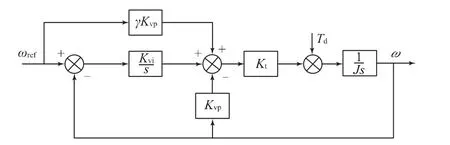
圖4 PDFF速度環控制框圖
2.3 位置控制器
設計位置調節器時,考慮到系統速度響應遠比位置響應快,即位置環截止頻率遠小于速度環各時間常數的倒數,在分析系統時,可以將速度環近似等效成一階慣性環節。速度等效以后,將位置環校正成典型Ⅰ型系統。設位置環比例系數為Kpp,開環傳遞函數為:

由于位置環的特殊性,不能出現超調,阻尼系數ξ=1,即可求出比例系數。
3 系統仿真分析
表1給出了永磁伺服系統電機的相關參數。電流環、轉速環均采用PI結構,位置環采用比例控制,系統仿真框圖如圖5所示。
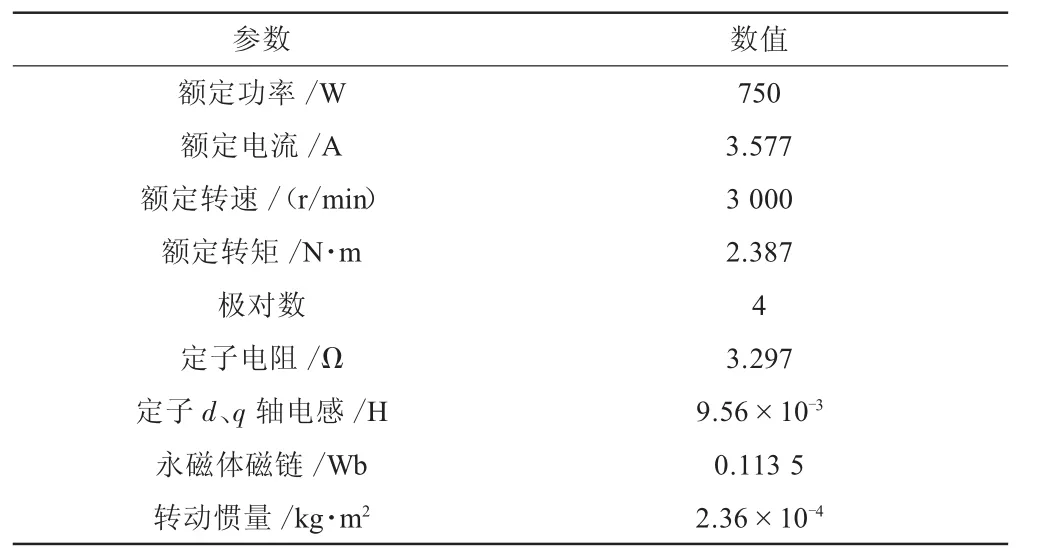
表1 永磁伺服電機參數表
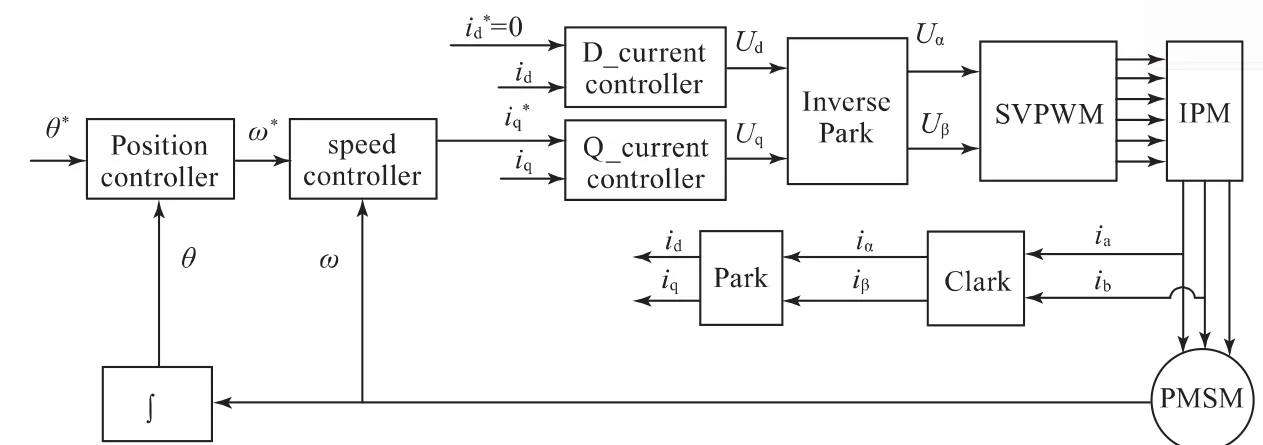
圖5 三環伺服系統矢量控制仿真框圖
仿真時,位置給定為斜率為10的斜坡信號。圖6~圖8從上到下分別為電流環、轉速環、位置環仿真波形圖,比較不同速度環控制器對電流、轉速、位置的跟蹤效果。在時間t1=0.04 s時加0.5倍的額定負載,觀察電機從空載到負載狀態時的響應效果;系統穩定后,在t2=0.08 s時去掉0.5倍的額定負載,觀察電機從負載狀態到空載的仿真效果。
4 結語
IP控制前向通道需要經過一個積分環節,響應時間較長,但是對干擾系統可以較快地恢復;PI控制的響應速度快于IP控制器,但抗干擾性能不及IP控制器;因此,將PDFF控制器引入永磁交流伺服系統,在參數設置合適時,其既具有PI的快速性又有IP的抗擾性。

圖6 PI結構三環仿真圖

圖7 IP結構三環仿真圖

圖8 PDFF結構三環仿真圖
[1]阮毅,陳伯時.電力拖動自動控制系統 運動控制系統[M].4版.北京:機械工業出版社,2009.
[2]曾孟雄,趙千惠,歐陽文.基于PMSM的三環數控交流伺服系統[J].組合機床與自動化加工技術,2012(5):45-48.
[3]錢健.永磁同步電機伺服控制系統研究[D].徐州:中國礦業大學,2016.
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
