一種提高鐵路車載激光雷達測量精度的方法
2018-05-30 09:03:31曹成度曹思語
鐵道勘察 2018年2期
曹成度 曹思語
(1.中鐵第四勘察設計院集團有限公司,湖北武漢 430063;2.武漢市第十四中學,湖北武漢 430060)
1 概述
為了滿足既有鐵路線路和站場的改建、擴建、技術改造及日常保養維護等工作對測量的需求,需要對既有線路和站場的地形、建筑物、構筑物、設備、股道、道岔、信號系統等進行詳細測繪[1]。當前,既有線測量主要依靠人工在“天窗”時間上道測量,其效率較低,安全性較差,亟需研發高效、安全的既有線測量方法[2,3]。
三維激光掃描技術又稱“實景復制技術”,它通過激光掃描測量方法快速獲取被測對象表面的三維坐標數據及其他關鍵信息。根據載體的不同,可分為星載、機載、車載和地面激光雷達。三維激光掃描技術突破了常規測量單點采集的模式,具有非接觸、效率高等優勢,為既有線復測提供了一種新的思路和技術手段。
近年來,國內外許多研究機構對車載激光雷達技術在傳統測繪領域的應用進行了系統的研究[4-6]。研究結果表明:受制于GPS和慣導的動態定位精度,車載激光雷達直接數據精度最高只能達到5 cm。在既有鐵路上進行掃描時, GPS信號受到鐵路上方高壓電線的干擾,獲取的激光雷達數據精度更低,無法滿足既有線測量的精度要求[2,7]。
針對上述技術問題,研究提高鐵路車載激光雷達掃描數據精度的方法,從而打破車載激光雷達系統在鐵路既有線測量中的應用瓶頸。
2 總體思路
車載激光雷達系統的測量誤差來源主要包括以下兩個方面。
①量測誤差:主要有GPS定位誤差、慣導定位定姿誤差、激光測距誤差等。
②系統集成誤差:主要為車載激光雷達系統多個模塊之間存在的集成、同步誤差。
受制于技術和國外廠商保密等原因,很難從源頭上對誤差進行分析和消除[8-10]。
分析車載激光雷達數據,可將多方面的誤差分為偶然誤差和系統誤差兩類。偶然誤差難以消除,但針對系統誤差,可以與已知數據進行對比,找到系統誤差的規律并予以消除。采用這一思路,在鐵路兩側按一定密度布設并測量控制點,基于控制點對激光雷達數據進行系統誤差分析,從而精化車載激光雷達數據。通過對比分析不同密度控制點的精化效果,找到控制點密度與激光雷達數據精度間的關系,從而確定滿足既有線測量的控制點密度,提高車載激光雷達數據精度。
3 作業流程
提高鐵路車載激光雷達測量精度方法的主要流程包括:控制標志布設與測量、車載激光雷達數據獲取、激光雷達數據精化等步驟。
3.1 控制標志布設與測量
在進行車載激光雷達掃描前,在待測鐵路沿線每隔一定距離布設一個控制標志。控制標志為40 cm×40 cm“田”字圖案,利用“十”字將控制標志等分成4個相同的邊長為20 cm的小正方形,4個小正方形左下、右上部分為黑色,左上、右下部分為白色。控制標志可采用塑料等輕型材料制作,標志表面可覆膜,以保證標志具有高反射性。
控制標志可采用高強度免釘膠粘貼在鐵路兩側(可貼在鐵路兩側的接觸網桿上或無遮擋的平整水泥地面上)。
控制標志中心坐標測量采用免棱鏡全站儀自由設站法,基于CPⅡ或CPⅢ進行定向(如圖1)。

圖1 布設標志示例
3.2 激光雷達數據采集
沿待測鐵路走向布設多個GPS基站,GPS基站可布設在CPI上。掃描時車載激光雷達系統與GPS基站進行同步GPS觀測,通過動態GPS差分實現激光掃描系統的高精度動態定位,相鄰兩個GPS基站間基線長度范圍為4~8 km。
在軌檢車上搭載移動激光掃描系統沿鐵路進行掃描作業,獲取鐵路車載激光雷達點云數據。為了滿足既有線測量要求,需將點云間距控制在2 cm以內,根據公式(1)可計算出行車速度。
(1)
其中:D為點云間距;
V為行車速度;
S為掃描頻率;
n為激光掃描系統激光頭的個數。
3.3 激光雷達數據精化
數據采集完成后,首先利用車載激光雷達系統自帶的軟件對激光雷達數據進行檢校、解算,得到初始激光雷達數據。
車載激光雷達系統有多個激光頭時,應對每個激光頭采集的點云數據單獨進行精化。精化步驟如下。
(1)讀取鐵路車載激光雷達點云數據,識別出每個控制標志中心的三維點云坐標。
(2)采集的點云數據不僅包括坐標信息,還帶有該點的采集時刻,按照采集時刻對所有點云進行劃分,如圖2所示,以控制標志中心點A,B,C…點相應的采集時刻Ta、Tb、Tc…為分界時間點,將整段點云數據分割成n段(如圖2)。
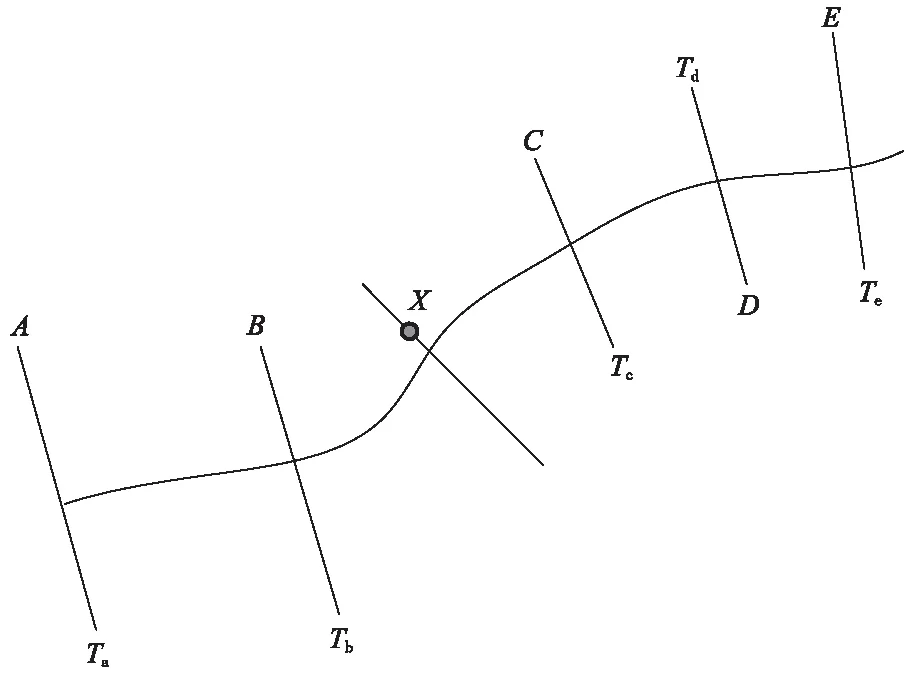
圖2 激光雷達精化示意
(3)激光點云數據三維坐標修正:對鐵路車載激光雷達點云數據中的任一點X(x,y,z),均可找到其最近的前后兩個控制點及相應的點云坐標B(xB,yB,zB)和C(xC,yC,zC),通過計算X與B、C間的歐氏距離l1和l2,B、C兩點其實測坐標為,(XB0,YB0,ZB0)和(XC0,YC0,ZC0),通過公式(2),即可計算出X點精化后的坐標。
(2)
4 試驗設計
選取漢丹鐵路作為試驗區。漢丹鐵路是武漢至丹江口的客貨共線鐵路,其中漢襄段作為武漢至成都、重慶鐵路通道的重要組成部分,列車運行時速由120 km提升到160 km,最高時速可達200 km,可開行動車組。本試驗選擇在漢襄段的云夢至下辛店工區,試驗線長度為23 km。
試驗時,選擇世界上領先的Optech Lynx SG1車載激光雷達系統,Lynx SG1配備了最高脈沖發射頻率達600 kHz的傳感器探頭,整套系統的最高數據采集頻率可達120萬測點/s,其360°全向掃描所形成的均勻分布數據,可滿足大比例制圖與工程勘測的精度需求。在原有的多臺工業量測相機基礎上,新提供了對Point Grey Ladybug相機系統的集成方案。
本試驗移動平臺為鐵路檢修平板車,該車具有雙車頭,最高時速可達80 km。試驗時,將Lynx SG1安裝在鐵路檢修平板車尾部,通過平板火車運動,對鐵路進行連續掃描(如圖3)。

圖3 現場工作
4.1 技術參數
Lynx SG1采集的技術參數如表1所示。
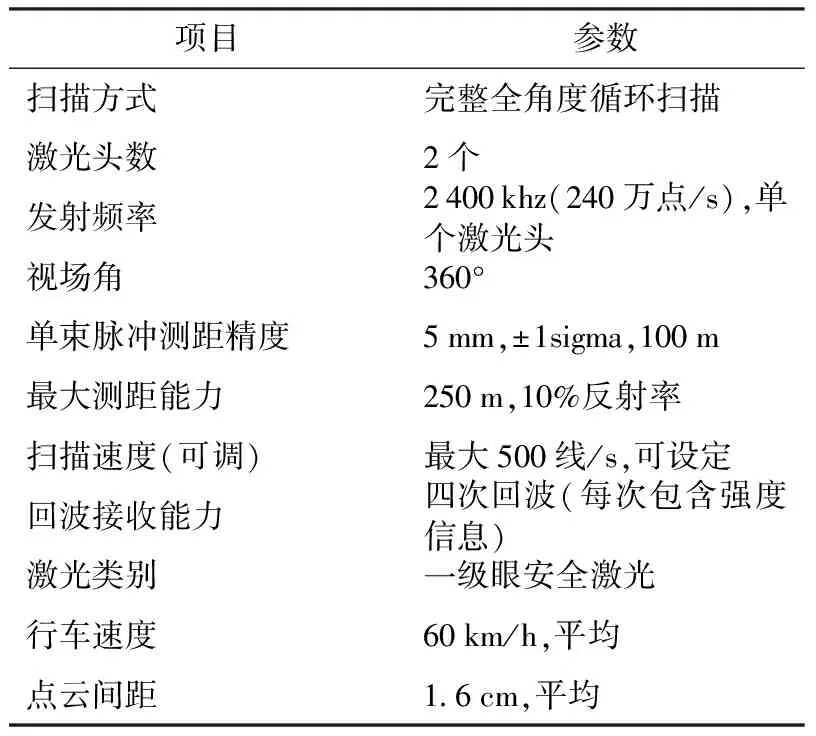
表1 技術參數
4.2 控制點布設
控制點布設分兩段,第一段長3 km,按照50 m間隔在鐵路兩側布設一對靶標;第二段長20 km,按照200 m間隔布設一對靶標,相鄰兩個靶標布設在鐵路的不同側。基于免棱鏡全站儀,先采用CPⅢ后方交會定向,然后測量控制標志坐標。
4.3 無控制激光雷達數據精度統計
數據采集完成后,利用控制標志對激光雷達數據進行精度檢核,精度統計如表2。

表2 無控制激光雷達數據精度統計
由表2可知,原始激光雷達數據精度約為10 cm,難以滿足鐵路既有線測量的相關要求。
4.4 精化試驗
為了探索控制點間距與激光雷達精度的關系,分別對4.2中的第一段和第二段數據進行以下兩組試驗。
(1)分別按照每50 m、100 m、200 m、300 m、400 m和500 m選取一個控制點對激光雷達數據進行精化,并將剩余的控制標志作為檢查點,激光雷達精度統計如表3所示。

表3 第一試驗段激光數據精度與控制點間距關系 m
分析表3,可以得出以下結論。
①控制點的密度越大,數據的精度越高。
②每400 m布設一個控制點,其平面和高程中誤差分別為0.015 m和0.015 m,即使控制點密度提高一倍,對精度提高的效果已不明顯。
(2)根據第一段的試驗結果,在第二段按照每隔400 m選取一個控制點對激光雷達數據進行精化,將剩余的控制標志作為檢查點,激光雷達精度統計如表4所示。
從表4中可以看出,按400 m間距布設一個控制點,其高程和平面精度與第一組試驗結果相當。

表4 第二試驗段激光數據精度與控制點間距關系 m
4.5 精度驗證
為了對激光雷達數據精度進行驗證,采用測量機器人,在漢丹線(云夢至下辛店段)共測量了272個有效軌頂中心點,并與車載激光雷達掃描的軌頂數據進行對比,以評價車載激光雷達數據的精度。
結果顯示,94.9%的點平面誤差絕對值在0.030 m以內,65.1%的點高程絕對誤差在0.020 m以內。水平誤差絕對值最大為0.054 m,平均值為0.011 m,中誤差為0.014 m;高程誤差絕對值最大為0.050 m,平均值為0.017 m,中誤差為0.015 m;空間絕對點位誤差最大值為0.057 m,平均值為0.022 m,中誤差為0.021 m。
從該精度統計結果可以看出,精化后的激光雷達數據,可滿足除高速鐵路中線和高程測量外的所有既有線測量工作的精度要求[11-12]。
[1] 王曉凱.車載激光雷達在鐵路復測中的應用探討[J].鐵道建筑,2013 (2):81-83
[2] 湯建鳳.基于車載激光雷達的鐵路既有線復測技術研究[J].鐵道工程學報,2016,33(12):43-47
[3] 張江,鄭曉輝.鐵路既有線復測方法探討[J].鐵道勘察,2005(2):15-16
[4] 張攀科,裴亮,王留召,等.車載激光掃描系統在地籍測量中的應用[J].測繪科學,2015,40(9):163-166
[5] 王曉凱.鐵路勘察機載激光雷達的應用及關鍵問題研究[J].鐵道工程學報,2010(10):11-14
[6] 劉丹.三維激光掃描技術在西客站既有結構斷面測量中的應用[J].鐵道建筑技術,2011(S2):244-245
[7] 中華人民共和國鐵道部.TBJ 105—1988 既有鐵路測量技術規范[S].北京:中國鐵道出版社,1989
[8] 韓友美,楊伯鋼.車載LiDAR技術市政道路測量高程精度控制[J].測繪通報,2013(8):18-21
[9] 魯勇,王留召,郭姣,等.車載激光移動建模測量系統點云精度檢核與誤差來源分析[J].中州煤炭,2012(6):53-55
[10] 梅文勝,周燕芳,周俊.基于地面三維激光掃描的精細地形測繪[J].測繪通報,2010(1):53-56
[11] 韓三琪.三維激光掃描儀單點精度的檢驗與分析[J].鐵道勘察,2013(6):9-11
[12] 王俊.地面激光雷達用于既有鐵路危巖調查的應用實例[J].鐵道勘察,2014(6):15-17
猜你喜歡
天天愛科學·科學啟蒙(2025年3期)2025-03-27 00:00:00
云南畫報(2021年12期)2021-03-08 00:50:54
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
鐵道通信信號(2018年7期)2018-08-29 01:17:04
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
通信電源技術(2016年4期)2016-04-04 02:58:04
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
工程建設與設計(2016年3期)2016-02-27 10:50:46
