同軸并聯式混合動力客車動力系統仿真研究
2018-05-26 07:31:26歐鵬飛馮乾隆張洋森
汽車實用技術 2018年8期
歐鵬飛,馮乾隆,張洋森
(長安大學汽車學院,陜西 西安 710064)
前言
同軸并聯式混合動力汽車將電機軸作為傳動軸的一部分,既可以施加電動機的轉矩,又可以傳遞發動機的轉矩,結構簡單,易于實現[1-3]。由于混合動力客車控制策略難以設計,同時控制策略參數的優化往往需要大量的實車試驗來完成,給車輛的開發帶來了極大的成本。設計與實車運行狀況相符的動力系統仿真模型可以實現對控制策略的驗證以及動力系統匹配優化的功能,優化設計流程,縮減設計周期,對車輛動力系統的開發具有一定的意義。
本文基于邏輯門控制提出了一種應用于同軸并聯式混合動力客車的控制策略,并通過仿真分析驗證本文設計的控制策略的有效性。
1 同軸并聯式HEV控制策略
同軸并聯式 HEV控制策略在驅動情況下,低速時以純電動驅動車輛,速度達到邏輯門限值 20km/h后發動機開始工作,電機輔助提供剩余轉矩或者吸收發動機發出的多余轉矩給電池充電,從而使發動機工作在最佳工作區間,同時發揮電動機低速高扭的特性。同軸并聯式 HEV 控制策略:根據加速踏板信號來判斷當前車輛工作在驅動狀態還是制動減速狀態,將驅動轉矩或制動轉矩根據當前系統的狀態分配給發動機、電動機、發電機以及機械制動,各動力部件的輸出轉矩改變車輛狀態,如圖1所示。
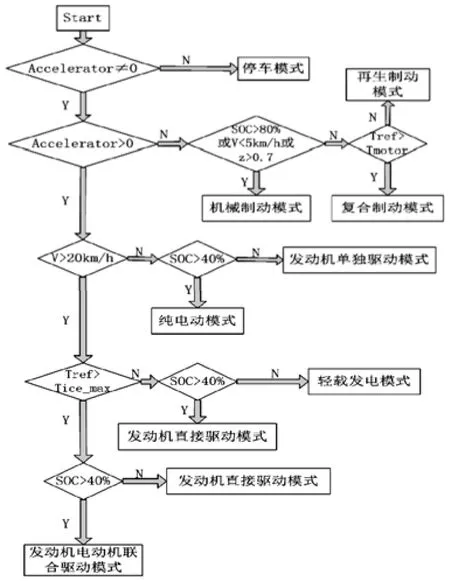
圖1 控制策略流程圖
1.1 驅動轉矩分配規則
根據車輛狀態、電池狀態以及整車需求轉矩的不同,可將驅動轉矩的分配規則分成以下六種情況討論:
(1)若V<20km/h且SOC>40%,為純電動模式,發動機需求轉矩T*ICE=0,電動機需求轉矩等于車輛行駛的需求轉矩即T*m=Tref。
(2)若V<20km/h且電池需要充電,此時發動機應該介入工作,由于此時發動機處于低效率區間,動力系統工作在發動機直接驅動模式,發動機的需求轉矩T*ICE=Tref,電機需求轉矩T*m=0。
(3)若V>20km/h,Tref<TICE_max,且SOC>40%,為發動機直接驅動模式,發動機轉矩滿足車輛行駛需求,不需電動機輔助,發動機需求轉矩T*ICE=Tref,電動機需求轉矩T*m=0。
(4)若V>20km/h,Tref<Tice_max且電池需要充電,此時動力系統工作在輕載發電模式,發動機的需求轉矩等于車輛需求轉矩加電池充電轉矩即T*ICE=Tref+Tbatt,電動機的需求轉矩等于發動機轉矩減車輛需求轉矩即T*m=Tref-TICE,此時電動機為發電狀態,T*m為電機充電轉矩。
(5)若V>20km/h,T*ICE_max>Tref且SOC>40% ,此時為聯合驅動模式,發動機需求轉矩等于最大轉矩即T*ICE=T*ICE_max,此時電動機處于驅動狀態,T*m為電機助力轉矩。
(6)若V>20km/h,T*ICE_max>Tref,電池需充電,此時電動機停止工作,發動機直接驅動電動機需求轉矩T*m=0。
1.2 制動轉矩分配規則
混合動力汽車制動過程中有再生制動,復合制動和機械制動3種制動工作模式。如果電池SOC較高(一般>80%)或車速低于一定值(5km/h)或者緊急制動時,總制動力矩全部由機械制動力矩提供。如果滿足條件SOC<80%、車度高于以及制動強度低于0.7,則以再生制動為優先制動[8]。若電動機當前轉速下最大轉矩Tm_max>Tbrake_ref,則電動機再生制動,否則采用復合制動。為實現最大能量回收,讓電動機工作在當前轉速最大轉矩狀態,有T*m=Tm_max,T*mech=Tbrake_ref-Tm。
2 仿真結果及分析
2.1 仿真結果
仿真初始條件為:電池SOC為40.29%,車速為零,加速踏板信號設置如圖2所示。
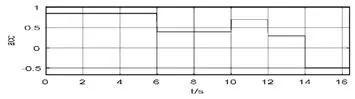
圖2 加速踏板信號
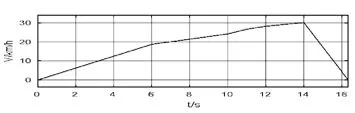
圖3 車速

圖4 電池SOC
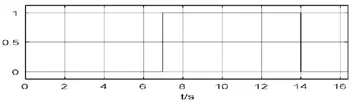
圖5 離合器
以下仿真實現了同軸并聯式HEV動力系統純電動模式、發動機單獨驅動模式、發動機電動機聯合驅動模式、輕載發電模式和再生制動五種運行模式,以及部分制動行駛工作模式,接下來按照模型運行的時間順序對不同工作模式下的加速踏板信號、電池SOC狀態、車速以及發動機電動機轉矩分配情況進行分析。
(1)從0到6.9s,系統處于純電動工作模式。車速從零開始加速,電池SOC從40.29%逐漸降低,車輛處于電動機單獨驅動狀態,發動機不提供轉矩,此時有TM=Tref,TICE=0。
(2)從6.9s到10s,系統處于發動機單獨驅動模式。車速達到 20km/h后繼續加速,此時發動機可以提供車輛行駛所需的全部轉矩,電動機停止工作,僅發動機工作,此時TICE=Tref,TM=0 。
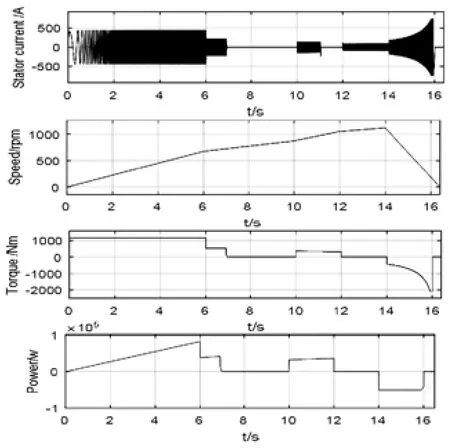
圖6 電動機波形圖
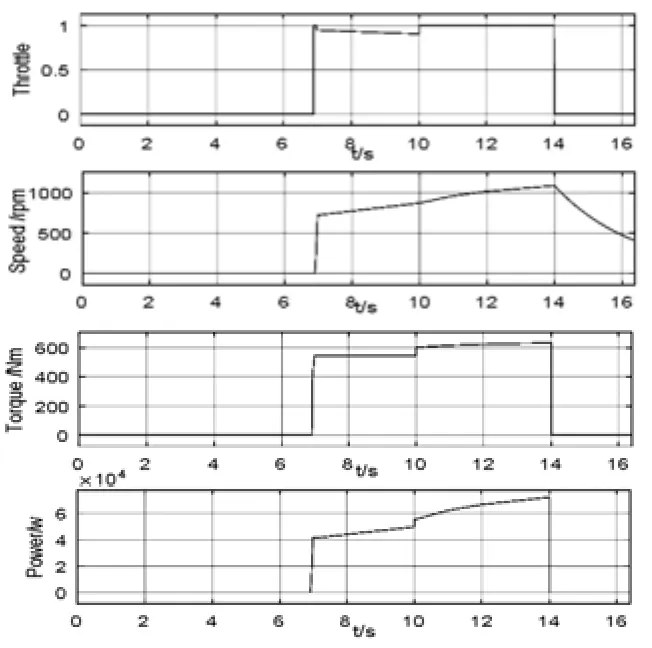
圖7 發動機波形圖
(3)從10s到11s,系統處于聯合驅動模式。車速繼續上升,電池SOC再次開始下降直到11s達到40%,此時車輛行駛需求轉矩大于發動機所能提供的最大轉矩,發動機與電動機聯合驅動,TICE=TICE_max,TM=Tref-TICE。
(4)從11到 12s,系統處于發動機單獨驅動模式。車速繼續上升但加速度小于10s-11s時,此時SOC下降到40%并停止供電,電動機不再工作,TICE=Tref,TM=0。
(5)從12s到14s,系統處于輕載發電模式。車速繼續升高,電池SOC也開始升高。車輛行駛需求的轉矩小于發動機能提供的最大轉矩,發動機一部分轉矩直接驅動汽車,另外提供一部分轉矩給電動機從而給電池充電,TICE=Tref+Tbatt,TM=TICE-Tref。
(6)從14s到16s,系統處于制動模式。加速踏板信號降低到-50%,車速開始下降,電池 SOC上升,發動機停止工作,電動機處于發電狀態。此時處于復合制動狀態,車輛的動能一部分通過電動機被轉化為電能儲存在電池中,另一部分通過摩擦制動轉換為熱能消耗掉。在16s時車速降低到5Km/h,制動模型從復合制動轉變為機械制動模式。
以上仿真實現了所預期的工作模式,各工作模式下轉矩的分配以及車速和電池SOC的變化符合轉矩分配規則,仿真結果證明了所建模型的正確性以及控制策略的有效性。
3 結論
本文以同軸并聯式混合動力客車動力系統為研究對象,設計了基于邏輯門轉矩分配的控制策略,詳細分析了動力系統驅動轉矩分配規則和制動轉矩分配規則,并且仿真實現了所預期的工作模式,各工作模式下轉矩的分配以及車速和電池SOC的變化符合轉矩分配規則,仿真結果驗證了本文提出的控制策略的有效性。
參考文獻
[1] De Leon N P. Design and simulation of a fast-charging station for plug-in hybrid electric vehicle (PHEV) batteries[J]. 2011.
[2] Bayram I S, Michailidis G, Devetsikiotis M, et al. Smart Vehicles in the Smart Grid: Challenges, Trends, and Application to the Design of Charging Stations[J]. 2012, 3:133-145.
[3] Syed F U, Kuang M L, Czubay J, et al. Derivation and Experimental Validation of a Power-Split Hybrid Electric Vehicle Model[J]. IEEE Transactions on Vehicular Technology, 2006, 55(6):1731-1747.
[4] Reid C, Blekhman D, Banales G, et al. Design and Development Process of a Parallel-Through-The-Road Plug-In Hybrid Electric Vehicle[J]. 2012.
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車與新動力(2015年1期)2015-02-27 12:11:01
電測與儀表(2014年17期)2014-04-04 11:56:50
汽車與新動力(2014年2期)2014-02-27 12:10:15