液晶屏測試機機械手結構改進設計
2018-05-18 09:23:08白建衛郭旭東
機械管理開發 2018年4期
白建衛, 劉 健, 郭旭東
(1.中國電子科技集團公司第二研究所, 山西 太原 030024; 2.中電科風華信息裝備股份有限公司,山西 太原 030024)
引言
隨著人們對手機和平板電腦等電子產品的品質要求越來越高,其生產過程中質量檢測環節顯得尤為重要,其中核心組件液晶屏的檢測更是重中之重。目前液晶屏點燈畫面不良檢測大部分靠人工目測檢查,檢測效率低、成本高,檢測質量標準不統一,而且人眼極易疲勞,不適合長時間工作。中電科風華信息裝備股份有限公司(以下簡稱“風華公司”)開發研制的CELLAOI自動點燈測試機可替代人工自動完成測試,有效解決人工檢查存在的問題。
風華公司所設計的液晶屏自動點燈檢測設備中的第一搬運機械手,為滿足客戶要求,在機械手臂上新增四套掃碼機構,機械臂負載大大增加,導致原機械結構不能適應要求,本文運用SolidWorks軟件中Simulation插件針對機械手結構中關鍵零部件進行有限元分析,找出結構薄弱點,對機械手結構進行優化改進[1]。
1 搬運機械手整體結構
本搬運機械手由電機驅動滾珠絲杠帶動取料手和掃碼機構運動,用于吸取液晶屏并搬運上料,其中取料手和掃碼機構均有四套,重量較大如圖1所示。
2 模型建立
2.1 三維模型建立
前端絲杠連接塊連接滾珠絲杠與整個運動部件,在機械手中起著關鍵作用,其強度決定了機械手整體結構強度,圖2為前端絲杠連接塊結構圖[2]。
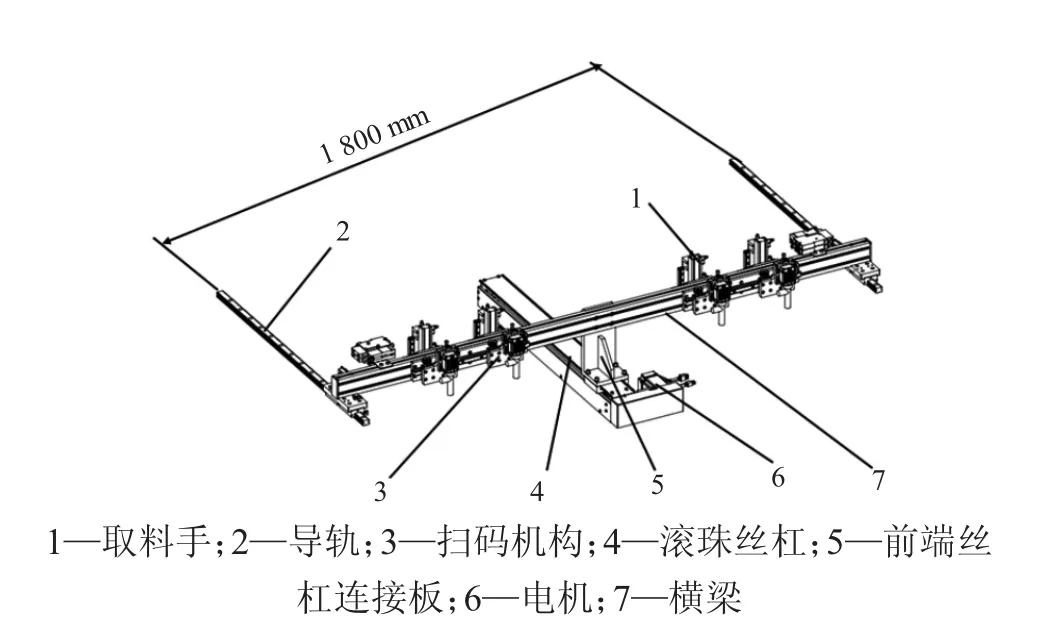
圖1 搬運機械手結構圖

圖2 前端絲杠連接塊結構圖
前端絲杠連接塊材料是2A12,密度ρ=2.78 g/cm3,彈性模量 E=73 GPa,抗拉強度 σb=480 MPa,屈服強度σ0.2=375 MPa,泊松比為μ=0.3。
2.2 受力分析
由工作要求確定機械手運動參數如表1所示。

表1 機械手運動參數
加速時:

減速時:

由表1數據可計算出作用在絲杠上最大力為F2=145.85 N,遠小于絲杠所能承受的軸向力。但絲杠軸撓曲載荷已超出其允許值。
2.3 連接塊有限元模型網格劃分
采用線性單元SOLID45,其支持非線性分析,在受力分析中可以得到良好的精度,把網格劃分為5mm,并對重要區域,如連接部位可能出現應力集中的地方進行網格細化,網格劃分效果如圖3所示。

圖3 網格劃分結果
3 有限元分析結果
由圖4分析結果云圖可以得知,增加掃碼機構后,重量增大,使得前端絲杠連接塊受到較大作用力,最大形變為0.032 mm,其運行中的姿態變化會使絲杠受到較大的彎矩,滾珠絲杠將很快被損壞。因此需要對第一搬運機械手機構優化設計,避免滾珠絲杠承受彎矩[3]。

圖4 前端絲杠連接塊分析結果云圖
4 結構改進設計
根據以上分析,第一搬運機械手需要從兩方面進行優化設計。一方面,在滾珠絲杠上方增加一根導軌,來保護滾珠絲杠,避免其承受過大撓曲載荷和彎矩。另一方面,優化前端絲杠連接塊結構,增加加強筋,減小零件形變,減小第一搬運機械手運行中的姿態變化,增強其運行過程的穩定性,如圖5所示。
運動加速度和速度不變,優化后機械手總質量m=31 kg,增加2 kg,下面對優化后絲杠連接塊進行有限元分析。優化后連接塊網格劃分如圖6所示。
得到絲杠連接塊受力變形情況如圖7所示。
計算結果顯示絲杠連接塊最大形變從原來的0.032 mm減小到現在的2.25×10-3mm。變形量明顯減小。小于絲杠軸撓曲載荷。

圖5 優化后機械手結構圖

圖6 優化后連接塊

圖7 優化前端絲杠連接塊分析結果云圖
優化后,機械手強度明顯得到加強,實際運行過程中通過采集電機負載曲線驗證,結構非常平穩,達到設計要求[4]。
5 結語
通過運用理論計算和有限元分析插件Simulation相結合對大跨度搬運機械手關鍵零件進行分析,得到機械手薄弱環節,并指導改進機械手結構,運用Simulation插件輔助設計大大提高了設計效率,縮短了設計周期,有效地降低了設計成本,也為一些沒有設計經驗的人員提供了一種直觀的方法。
參考文獻
[1]高亮,劉江波.基于SolidWorks的采煤機截齒結構優化仿真分析[J].煤炭技術,2017,36(10):257-258.
[2]楊剛,李臣友,于國輝,等.基于SolidWorks的吸嘴支撐臂有限元分析[J].機電產品開發與創新,2014,27(4):79-80.
[3]李楊,李光.基于SolidWorks的托盤結構有限元分析及優化設計[J].包裝工程,2011,32(19):1-4.
[4]李威,李錦,吳斌.基于SolidWorks的彈頭壓入專機的有限元分析和結構優化[J].兵工自動化,2011,30(7):36-38.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24