振動方式和頻率對杏樹振動采收響應的影響
2018-05-13 17:46:04楊會民王學農牛長河郭文松侯書林
農業工程學報 2018年8期
散 鋆 龍,楊會民,王學農,牛長河,郭文松,侯書林※
(1. 中國農業大學工學院,北京 100083;2. 新疆農業科學院農業機械化研究所,烏魯木齊 830091)
0 引 言
杏(Armeniaca vulgaris)是具有高營養價值和經濟價值的特色林果。目前中國杏采收仍為人工手摘或長桿敲打后撿拾等方式,采收成本占整個生產成本的 50%~70%[1-2]。新疆是中國主要的杏生產種植加工及出口地區,隨著收獲成本不斷上漲,杏規模化、產業化發展受到了嚴重制約。林果機械化收獲是提高采收效率、降低勞動成本的有效途徑之一[3]。中國對林果機械化收獲的研究起步較晚,理論研究不完善,迫切需要對林果機械化收獲基礎理論進行研究與探討。
振動采收是林果機械化收獲過程中應用最廣泛的技術之一。早在1940年美國就已經開始了對林果機械化的研究,國外對林果振動收獲理論進行了較為全面的分析和探討[4]。Fridley等[5]等將果枝簡化為懸臂梁模型進行研究,將果枝與振動機械視為單自由度振動系統進行分析;Whitney等[6-7]推導了果樹與振動收獲機間的受力及運動模型;Horvath等[8-9]將果樹細分為三個部分:根系-土壤、樹干-主枝和樹冠,分析研究不同部分對整體振動系統的影響;Láng等[10-12]對櫻桃樹振動收獲過程中果樹能量損耗以及果樹模型進行了研究;Bentaher等[13]建立了“Chemlali”品種橄欖樹有限元模型,模擬規則振動激勵與復合振動激勵下果樹振動收獲過程,對兩種收獲方式下橄欖樹的動態響應特性進行了分析和比較。
中國對林果機械化收獲理論也進行了大量的研究。Du等[14-17]對修剪規則的櫻桃樹在不同的振動激勵下的響應動態進行了研究,同時還研究了三維激振載荷對果樹的激振作用,建立了果樹有限元模型;蔡菲等[18-23]利用高速攝像儀分析果實受振動脫落過程的運動狀態,此后對“Y”型果樹動力學模型進行了仿真分析與試驗。
本文主要通過研究杏樹受到不同振動激勵后的響應狀態,分析杏樹不同位置的振動響應,獲得杏樹不同位置受迫振動穩態后的加速度曲線、函數以及頻譜圖,研究最佳的杏樹振動采收頻率,為杏及其他品種林果的收獲機械參數設計提供理論依據。
1 林果振動采收機結構與工作原理
1.1 振動采收機結構
常見的偏心振動式林果采收機偏心部件可分為單偏心和對稱雙偏心兩種形式。本文選用兩種機型來完成整個杏樹受迫振動試驗,單偏心式采收機選用新疆農墾科學院機械裝備研究所4YS-24型偏心式林果收獲機[24-26],對稱雙偏心式采收機選用新疆農業科學院農業機械化研究所4GZG-25型牽引式林果振動收獲機[27]。
1.2 工作原理
拖拉機后輸出軸為振動采收機提供動力,工作機構由液壓系統控制,液壓油缸控制振動夾持機構位置與夾鉗開合狀態,液壓馬達帶動偏心塊旋轉,為采收機提供穩定振動源。振動收獲過程中,調整振動采收機夾鉗位置,使其與果樹樹干夾緊,采收機與果樹間剛性連接,偏心塊轉動產生激振力傳遞給果樹,果樹受迫產生振動。振動能量沿果樹樹干傳遞給果實,果實由于自身慣性作用產生加速運動,當果實產生的慣性力大于果實與果柄間連接力時,果實從果枝上脫離,完成整個采收過程。
2 主要結構與模型
2.1 振動采收機關鍵部件
偏心塊是振動采收機的核心部件,不同的偏心塊轉動速度、轉動方向、轉動角度、質量與形狀等可產生不同的正弦激振力[28]。4YS-24型偏心式收獲機偏心塊采用扇形設計,安裝在夾持機構后方與夾持機構整合在一起懸掛在伸縮支臂上(如圖 1a);4GZG-25 牽引式振動收獲機偏心塊采用半圓形設計,2個偏心塊對稱安裝在振動箱中,振動箱安裝在夾持懸臂后方(如圖1b),工作時偏心塊同時轉動,方向相反,速度相同。
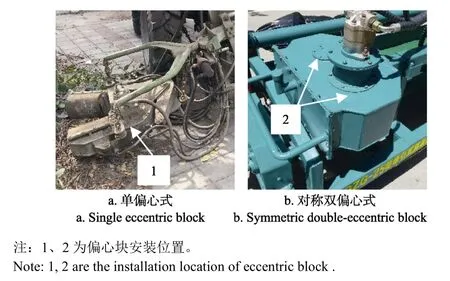
圖1 2種振動采收機偏心部件Fig.1 Two kinds of vibration harvesting machine eccentric parts
2.2 杏樹受迫振動動力學模型
通過建立杏樹受迫振動響應模型,分析在采收過程中杏樹的連續振動響應狀態與振動規律;建立杏樹-采收機整體動力學模型,分析系統整體簡諧振動的響應,明確杏樹振動采收機理。
振動采收作業中,杏樹與采收機組成連續的振動系統,為了便于分析與理論推導,將杏樹簡化為一端固定的懸臂梁結構[29]。此時,杏樹可視為能夠離散成有限個自由度的系統,樹干視為等密度、等截面的圓柱梁,杏樹樹冠部分視為質量團,位于圓柱梁可活動端。經測量成熟期庫麥提品種杏果實可溶性固形物含量為21.51%,杏樹樹干密度為0.76 g/cm3。根據國家標準[30-31],測得杏樹順紋抗拉強度為 53.75 MPa,杏樹樹干含水率為38.39%。
在垂直平面上,以杏樹根部中心o為原點,x方向為與地面垂直方向,y方向為水平方向,建立杏樹平面坐標系,對杏樹受迫振動進行動力學分析。
2.2.1 杏樹受單偏心式振動模型
單偏心式收獲機進行工作時,杏樹受迫振動主要表現形式為扭轉振動如圖2所示。
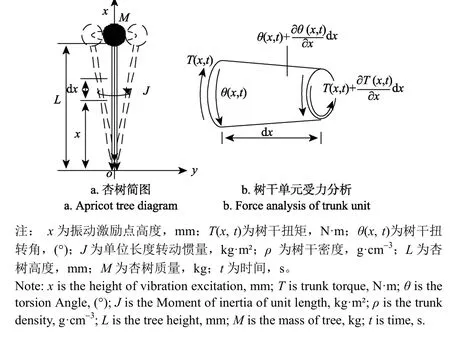
圖2 杏樹扭轉振動模型Fig.2 Torsional vibration model of apricot tree
樹干受到扭轉應力,針對圓形截面選用極慣性矩進行計算杏樹轉動慣量。因此杏樹的轉動慣量公式為
式中ω為扭振固有角頻率,rad/s;待定常數A、B由邊界條件決定,C、D由采收機振動輸出初始條件決定。
由此可得杏樹扭振的振型函數為

通過理論分析可知:杏樹在單偏心振動過程中,以靜止時中心軸做扭轉運動,樹干整體運動軌跡類似于倒圓錐體形,實際運動過程中由于樹干和樹枝具有一定的彈性,會出現一定的彎曲擺動現象。
2.2.2 杏樹受對稱雙偏心式振動模型
對稱雙偏心式收獲機進行工作時,杏樹受迫振動主要表現形式為彎曲振動(如圖 3),可將杏樹視為典型的“歐拉-伯努利梁”,杏樹被施加激振力后產生橫向位移y(x,t),長度為dx的杏樹等截面單元受力如圖3b所示。

圖3 杏樹橫向振動模型Fig.3 Horizontal vibration model of apricot tree
根據牛頓第二定律可知,杏樹單元體力矩平衡,簡化后杏樹符合歐拉-伯努利梁方程

其中βi為式(7)微分方程的根;i取值為1,2,3,4。通過βi可計算果樹i階的固有頻率。
理論分析表明:杏樹受對稱雙偏心式采收機施加的振動激勵時,沿著夾持位置方向做水平往復運動,樹干整體運動軌跡類似于扇形。同樣,受杏樹自身材料特性影響,在運動過程中也會出現彎曲現象。
2.3 杏樹-采收機動力學模型
在工作過程中,夾持機構與杏樹剛性連接,可將杏樹與采收機視為整體。在水平平面上,以杏樹夾持位置中心o為原點的坐標系,x方向為振動系統水平運動方向,y方向為振動系統垂直運動方向,建立杏樹-采收機動力學模型,如圖4所示。利用等效彈性系數k與等效阻尼系數c表示杏樹的力學特性,將杏樹-采收機整體簡化成為單自由度振動系統,采收機工作過程中,瞬時合力相互平衡,合力為0。
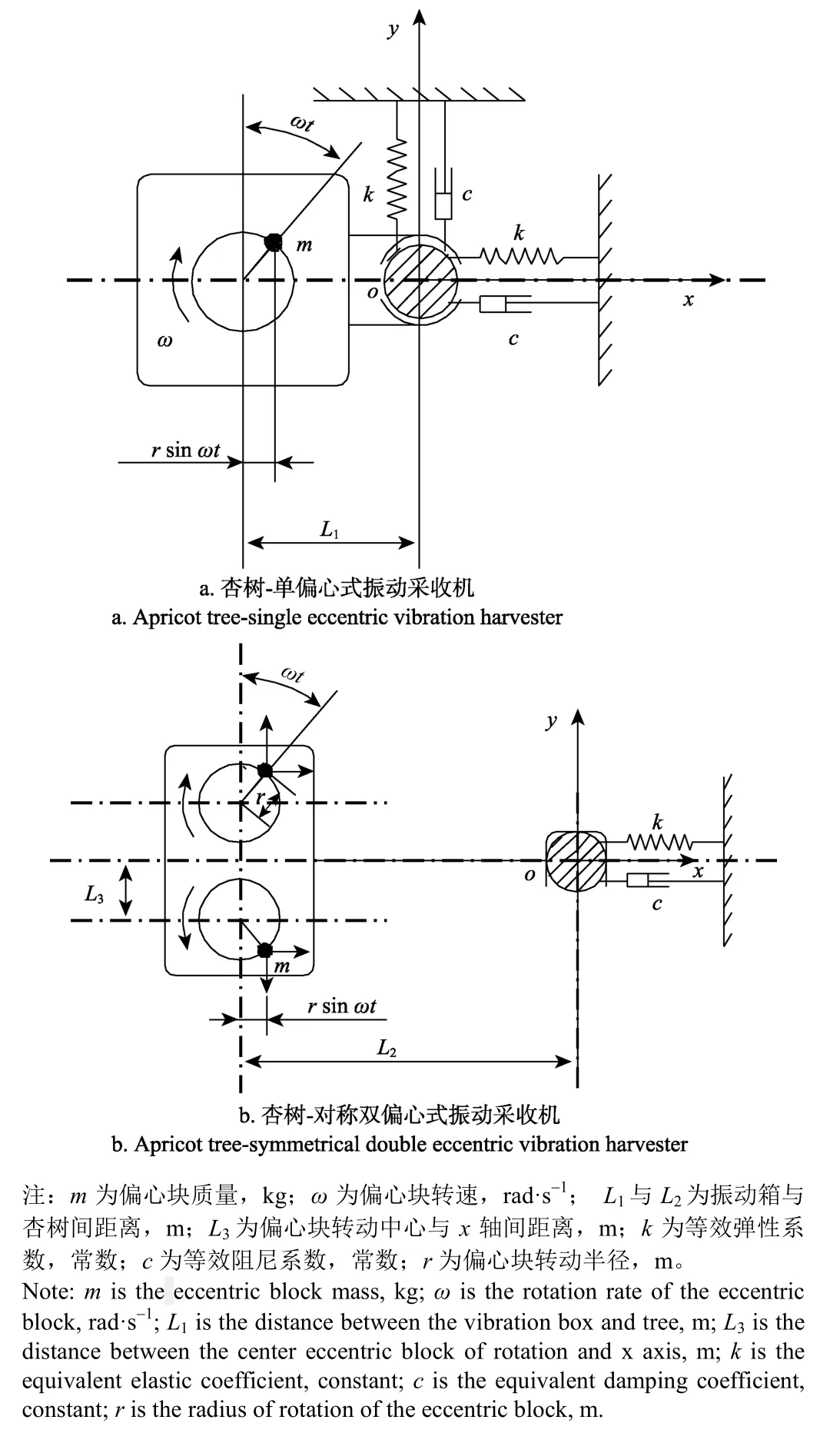
圖4 杏樹-振動采收機動力學模型Fig.4 Dynamic model of apricot tree -vibration harvester
對杏樹-單偏心式采收機整體系統(如圖4a)進行受力分析,建立系統在x與y方向上的振動微分方程組

式中 Mt為采收系統總質量,kg;x為杏樹偏離原點的 x方向位移,m;y為杏樹偏離原點的y方向位移,m。
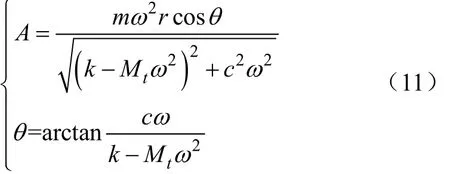
對稱雙偏心式采收機工作過程中,2個偏心塊轉速相同,方向相反,對杏樹-對稱雙偏心式采收機振動系統(如圖4b)受力分析可知:x方向上產生的偏心力大小相等,方向相同;y方向上產生的偏心力大小相等,方向相反,作用力相互抵消,合力為零。
系統振動微分方程為

分別對 2個系統的二階常系數微分方程進行求解,推導出系統振幅A與相位差θ表達式為
3 試驗材料與方法
3.1 試驗材料
本試驗于2017年6月底杏成熟期,在新疆喀什地區莎 車 縣 國 有 二 林 場 果 園 中 進 行 ( 38°12′24.54″N ,77°08′49.73″E),試驗果園水肥管理良好,無套種作物,果樹為8 a樹齡的庫買提杏樹。
3.2 試驗儀器
采收機:4YS-24型偏心式收獲機和 4GZG-25 牽引式振動收獲機。加速度傳感器為蘇州試驗儀器設備公司:YMC壓電式IEPE型加速度傳感器,靈敏度50 mv/ms2,頻率范圍0~4 000 Hz,測試范圍±10 g(g為重力加速度,取9.8 m/s2)。美國NI公司振動信號采集設備及軟件:NI DAQ 9 178四通道信號采集器,NI 9 234振動信號采集卡以及LabView振動測試虛擬軟件。
3.3 試驗方法
在杏樹主干夾持位置(一級枝干)以及沿主干向上每級樹枝分叉的主枝干處安裝傳感器,每個傳感器在豎直方向上間隔距離相等為800 mm。由于杏樹分支受迫振動方向是不可預測的,為保證試驗的準確性,所有傳感器安裝方向與夾持位置x方向傳感器安裝方向保持一致,傳感器安裝位置如圖5所示。
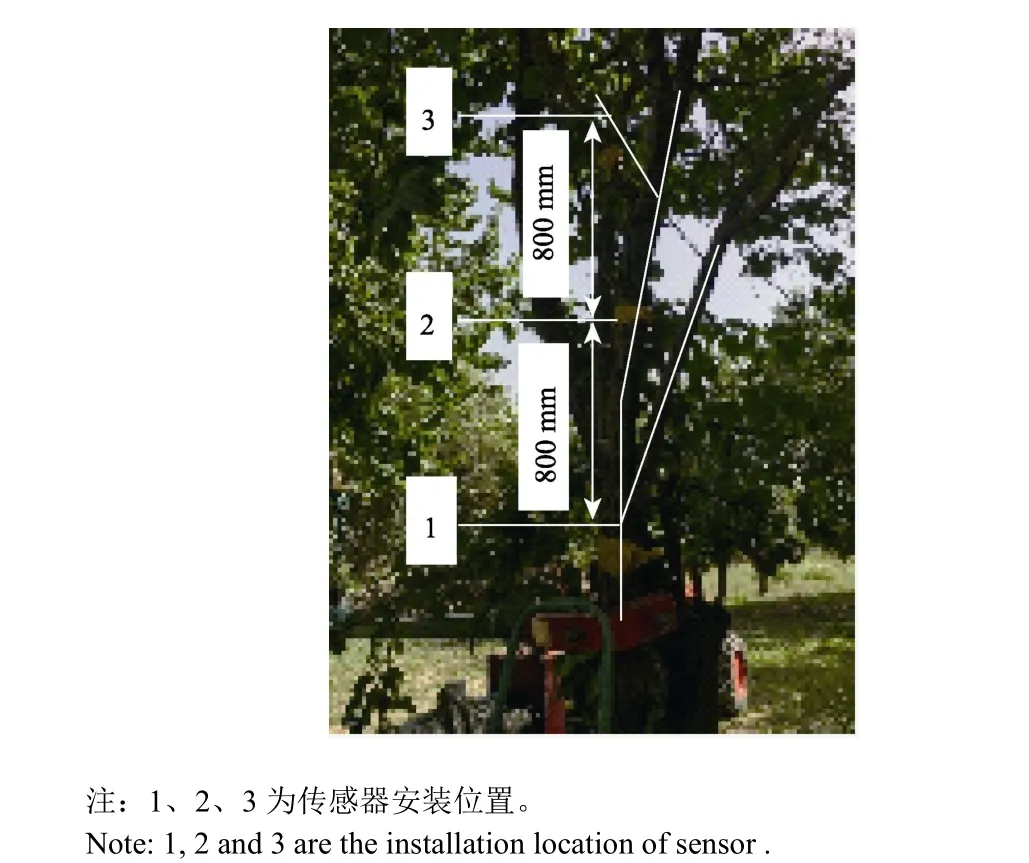
圖5 加速度傳感器安裝位置Fig.5 Installation location of acceleration sensor
為了測量夾持位置處杏樹的響應狀態是否與建立的杏樹-采收機理論模型一致,按照模型坐標系在實際夾持位置x,y方向均安裝傳感器。
利用 2種振動采收裝置進行振動試驗,傳感器通過傳輸線與NI DAQ 9 178振動信號采集儀相連,振動測試信號由LabView振動測試軟件進行記錄分析。杏樹振動采收檢測試驗流程如圖6所示。
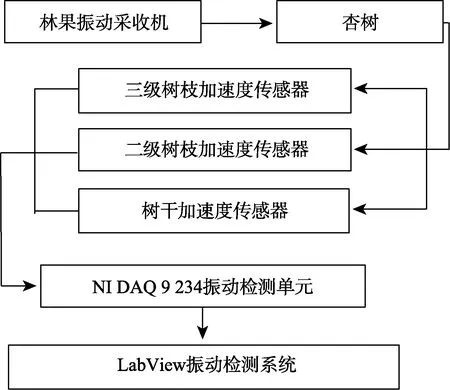
圖6 振動檢測技術路線圖Fig.6 Technology roadmap of vibration detection
4 試驗分析與結果
4.1 杏樹-采收機動力學模型驗證
根據杏樹-采收機動力學模型微分方程求解所得系統振幅A,mm。單偏心式振動采收機x與y方向位移應滿足

式中X為x方向位移,mm;Y為y方向上位移,mm.
由此可推導出杏樹-單偏心式采收機系統振動軌跡為半徑為A的圓形,其x與y方向加速度形成的圖像也為圓形,半徑為最大加速度值。通過對樹干夾持位置 x,y方向安置傳感器可得樹干振動過程中的加速度李薩如圖形,實際軌跡為繞圓心(0,0)的近似圓形軌跡。如圖7a所示,實際軌跡與理論軌跡對比可知,樹干實際振動過程與理論推導一致。
對稱雙偏心式振動采收機x方向位移:X2=A2;y方向位移:Y=0。可推導出振動過程中系統運動軌跡可視為沿夾持位置中心做往復直線運動。通過傳感器測得加速度數據可知,實際運動位置集中在x為0的上下兩側區域。如圖7b所示,實際軌跡與理論軌跡對比可知,實際杏樹振動與理論推導一致。
4.2 杏樹不同位置振動響應
為研究杏樹振動過程中,振動響應與振動傳遞的過程,利用傳感器測量不同位置杏樹的振動時間差,將編寫的LabView振動測試虛擬軟件程序與NI DAQ 9 178四通道信號采集器得到的數據,導入MATLAB中并根據已推導公式進行擬合分析,得到不同位置杏樹響應函數。
由于采集到的振動參數數據龐大,為了能更好研究和描述振動特性,本試驗選取進入穩態后0.1 s內的數據,利用MATLAB曲線擬合分析工具進行分析。

圖7 2種振動采收機夾持位置加速度李薩如圖形Fig.7 Clamping position Lissajous graphic of two kinds of vibration harvester
4.2.1 單偏心式振動收獲杏樹響應狀態
單偏心式振動激勵下杏樹不同位置的振動響應曲線如圖 8所示。由杏樹振動模型可知,杏樹受單偏心式振動過程中系統符合傅里葉變換形式,采用傅里葉擬合形式進行分析和求解。
振動激勵進入穩態后,對0.85~0.95 s內杏樹不同位置的振動數據進行擬合分析,擬合曲線如圖9所示。
由振動響應曲線圖8a可知,杏樹夾持位置在0.135 s開始振動,0.259 s夾持位置達到穩態。穩態下夾持位置最大加速度為10.4 g,0.1 s內振動數據傅里葉擬合分析,可得R2為0.912 1。
單偏心式振動夾持位置加速度響應函數為

由圖 8b可知,0.181 s時杏樹二級枝干開始振動,0.282 s時二級枝干達到穩態,振動過程中最大加速度值為5.1 g。穩態下0.1 s內二級枝干振動數據傅里葉擬合分析,可得R2為0.928 6。
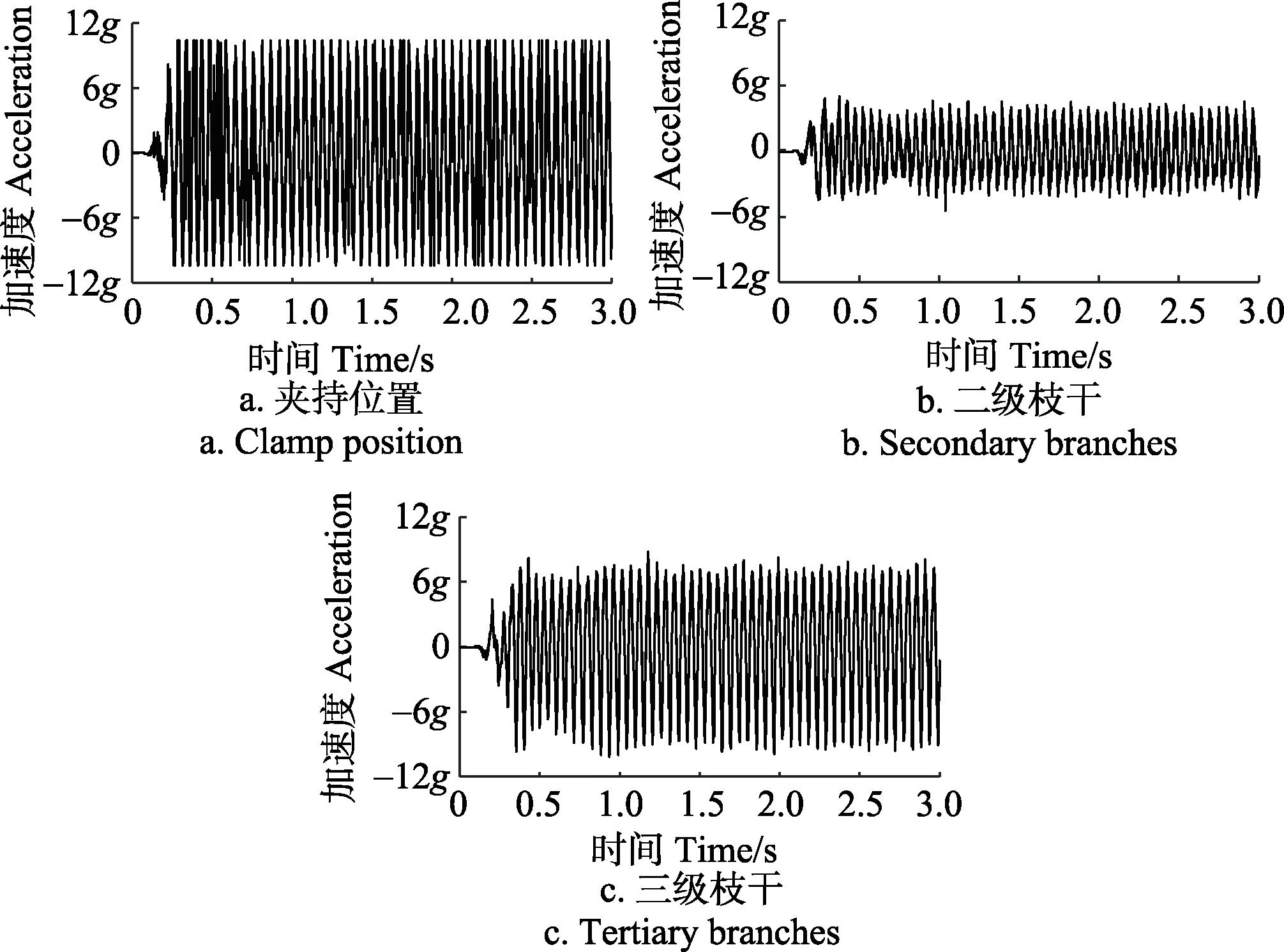
圖8 單偏心式振動激勵下杏樹不同位置響應曲線Fig.8 Response curves of different locations of apricot trees by single eccentric vibration

圖9 單偏心式振動杏樹不同位置加速度擬合曲線Fig.9 Fitted curve of acceleration of different locations of apricot trees by single eccentric vibration
單偏心式振動二級枝干加速度響應函數為

由圖8c可知,杏樹三級枝干在0.191 s時開始振動,0.351 s三級枝干達到穩態,最大加速度8.8 g。0.1 s內穩態振動數據傅里葉擬合分析,可得R2為0.981 9。
單偏心式振動三級枝干加速度響應函數為
由杏樹不同位置振動擬合曲線圖 9可知,在杏樹受單偏心式振動收獲機施加的振動時,各檢測點均呈周期性簡諧運動,穩態時激振周期為0.05 s(20 Hz);從振動開始時間看,振動從夾持點樹干逐級向樹枝傳遞;由于杏樹受扭轉振動,且二級枝干處于杏樹分叉處,杏樹夾持位置振動位移小于三級枝干,相同垂直距離,三級枝干檢測處位移約為二級枝干檢測處兩倍。
4.2.2 對稱雙偏心式振動收獲杏樹響應狀態
對稱雙偏心式振動激勵下杏樹不同位置的振動響應曲線如圖10所示。對稱雙偏心式振動過程中,杏樹可視為歐拉-伯努利梁,其函數也符合傅里葉變換形式。對杏樹受對稱雙偏心式振動收獲機振動激勵達到穩態后的振動數據進行傅里葉擬合分析和求解。振動激勵達到穩態后,對1.4~1.5 s內不同位置振動數據進行傅里葉擬合分析,擬合曲線如圖11所示。
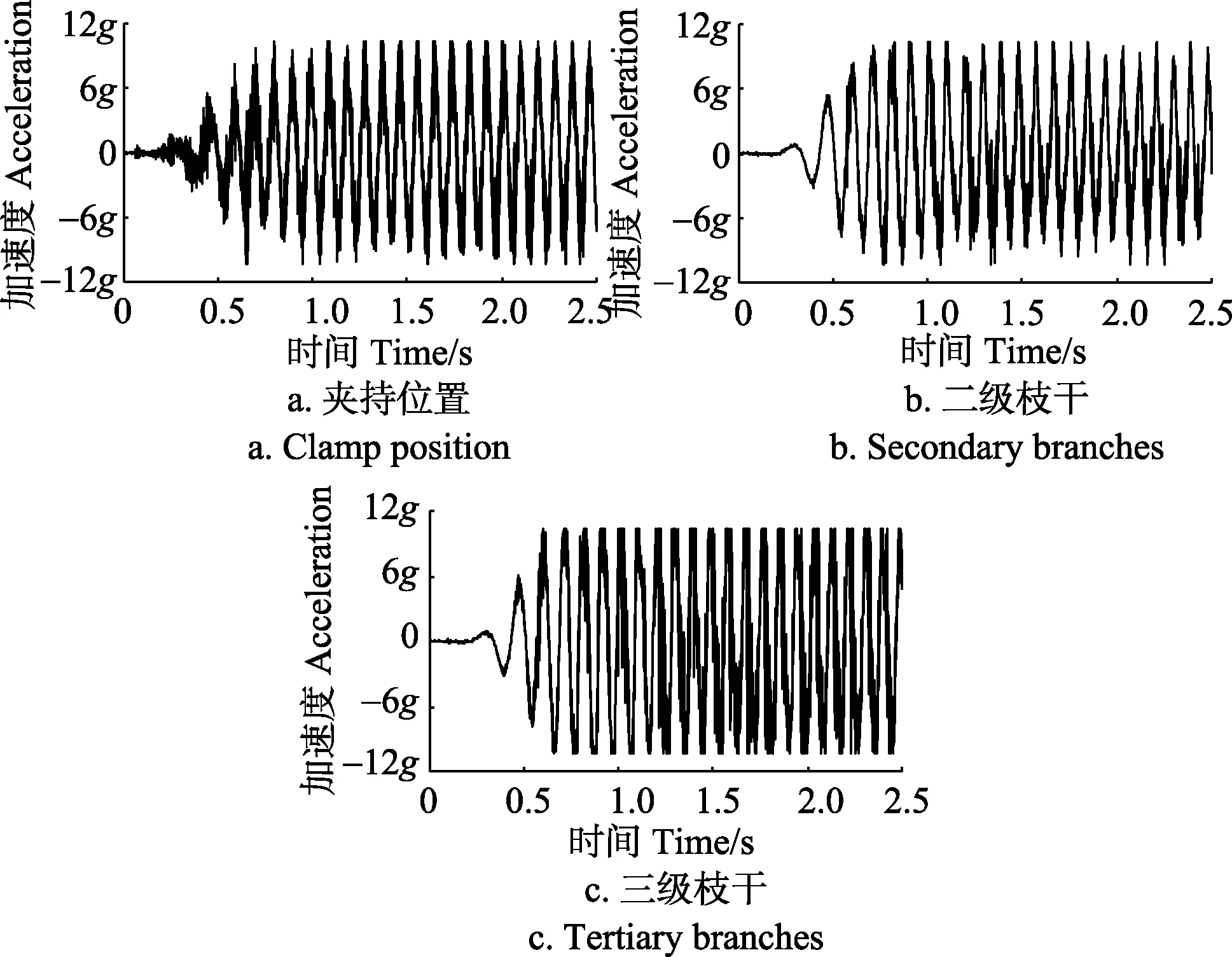
圖10 對稱雙偏心式振動激勵下杏樹不同位置響應曲線Fig.10 Response curves of different locations of apricot trees by symmetrical double-eccentric vibration
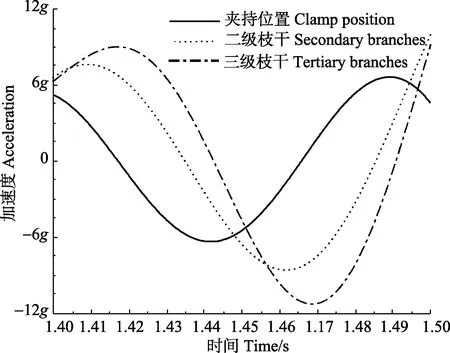
圖11 對稱雙偏心式振動杏樹不同位置加速度擬合曲線Fig.11 Fitted curve of acceleration of different locations of apricot trees by symmetrical double-eccentric vibration
由振動響應曲線圖10a可知,對稱雙偏心式振動激勵下杏樹不同位置響應曲線可知,杏樹夾持位置在0.052 s開始振動,0.646 s時達到穩態,夾持位置最大加速度為10.4 g。穩態下0.1 s內夾持位置振動數據傅里葉擬合分析,可得R2為0.906 2。
對稱雙偏心式振動夾持位置加速度響應函數為

由圖10b可知,杏樹二級枝干在0.219 s開始振動,在0.764 s時達到穩態,振動過程中最大加速度10.3 g。穩態下0.1 s內二級枝干振動數據傅里葉擬合分析,可得R2為0.939 8。
對稱雙偏心式振動二級枝干加速度響應函數為
由圖10c可知,杏樹三級枝干在0.224 s時開始振動,在0.773 s時達到穩態,最大加速度10.4 g。三級枝干0.1 s穩態振動數據傅里葉擬合分析,可得R2為0.93。
對稱雙偏心式振動三級枝干加速度響應函數為
由杏樹振動擬合曲線圖11可知,在杏樹受對稱雙偏心式振動收獲機施加的振動時,各檢測點均呈周期性簡諧運動,穩態時激振周期為0.1 s(10 Hz);從振動開始時間看,振動從夾持點樹干逐級向樹枝傳遞;穩態后各級枝干振動最大加速度均能與激振點一致。
4.3 不同激振方式頻譜分析
對不同激振方式下測得各位置加速度在0~50 Hz內振動過程進行掃頻分析,通過加速度與頻率間頻譜曲線,研究 2種激振方式下庫麥提品種杏樹的共振特性和收獲所需最佳頻率范圍。
對杏樹—單偏心式收獲機振動采收系統工作過程中,杏樹各部位加速度變化曲線如圖12a所示。在掃頻區間內出現了4階明顯的共振頻率,在11.56 Hz時,各位置加速度均為測量期間的最大值,其中夾持位置 x與 y方向加速度接近,分別為10.06 g和11.69 g;二級枝干與三級枝干加速度相近,分別為5.31 g和5.95 g。
對杏樹—對稱雙偏心式收獲機振動采收系統工作過程中,杏樹各部位加速度變化曲線如圖 12b所示。在掃頻區間內出現了3階明顯的共振頻率,在11.56 Hz時,各位置加速度也均為測量期間的最大值,其中夾持位置y方向加速度相對其他測量位置較小;其他各檢測點按加速度大小分別為:三級枝干7.95 g、夾持位置7.05 g和二級枝干6.12 g。
杏樹最佳收獲頻率范圍在10~20 Hz之間[32]。針對本試驗的庫麥提杏品種果樹,由加速度頻譜圖12可知,2種方式振動激勵下杏樹-收獲機系統在11.56 Hz的振動頻率下各檢測點加速度均為最大值。其中,單偏心式振動夾持位置加速度大于各級枝干,即各級枝干在相同頻率下振動幅度小;對稱雙偏心式振動傳遞到第三級枝干后加速度明顯大于夾持位置。相同頻率下對稱雙偏心式振動各級枝干響應加速度大于單偏心式振動,即振動幅度大。
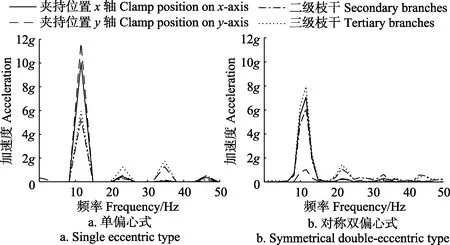
圖12 2種振動收獲機加速度頻譜圖Fig.12 Acceleration spectrogram of two kinds of vibration harvester
5 結 論
1)建立杏樹振動模型、杏樹-采收機動力學模型進行理論分析以及夾持位置處得到的李薩如圖形。分析可知:杏樹受單偏心式振動激勵時,會產生扭轉振動,整體運動為軌跡類似于倒圓錐體形,水平截面上運動軌跡為圓形;受對稱雙偏心式采收機施加的振動激勵,沿著夾持位置方向做水平往復振動,整體運動軌跡類似于扇形,水平面上運動為直線。
2)利用安裝在杏樹不同位置的加速度傳感器得到庫麥提品種杏樹振動響應曲線,測量處由下至上開始振動,時間分別為單偏心式0.135、0.181和0.191 s,對稱雙偏心式0.052、0.219和0.224 s。由于杏樹材料特性和生長的不規律性,單偏心式振動激勵下杏樹響應比對稱雙偏心振動響應復雜,在相同枝干位置,振動響應狀態不同。
3)通過MATLAB對穩態內0.1 s的振動數據進行傅里葉擬合分析,穩態時單偏心式振動系統周期為0.05 s,對稱雙偏心式振動系統周期為0.1 s的杏樹各測量點振動加速度響應曲線和函數。
4)分析庫麥提品種杏樹受迫振動頻譜圖可知,本次試驗中庫麥提杏樹在11.56 Hz頻率下,各枝干響應加速度均為最大值;單偏心式振動夾持位置加速度大于各級枝干,對稱雙偏心式振動傳遞到三級枝干時加速度高于夾持位置;相同頻率下對稱雙偏心式振動各級枝干響應加速度大于單偏心式振動,更利于振動采收。
[參 考 文 獻]
[1] 王麗麗, 郭艷玲, 王迪, 等. 果蔬采摘機器人研究綜述[J].林業機械與木工設備, 2009, 37(1): 5-8.Wang Lili,Guo Yanling,Wang Di,et al. Overview of study on fruit and vegetable picking robots[J]. Forestry Machinery& Woodworking Equipment,2009,37(1): 5-8. (in Chinese with English abstract)
[2] 吐魯洪, 阿依木妮莎, 杜英. 國外果樹振動采收機[J]. 新疆農機化, 2004 (3): 54-55.
[3] 散鋆龍, 牛長河, 喬圓圓, 等. 林果機械化收獲研究現狀、進展與發展方向[J]. 新疆農業科學, 2013, 50(3): 499-508.San Yunlong, Niu Changhe, Qiao Yuanyuan, et al.Development of fruit mechanized harvest and its relevant research[J]. Xinjiang Agricultural Sciences, 2013, 50(3): 499-508. (in Chinese with English abstract)
[4] Tehran K I. Determination of vibrational properties of Shahroudi's almondstem[J]. International Journal of Agriculture and Crop Sciences,2013,5(6):638-645.
[5] Fridley R B, Adrian P A. Some aspects of vibratory fruit harvesting [J]. Agriculture of Engineering, 1960, 41(1): 28-31.
[6] Whitney J D, Churchill D B, Hedden S L, et al. Trunk shakers of citrus harvesting. Part I: Measured trunk shaker and tree trunk motion [J]. Applied Engineering in Agriculture,1988, 4(2):93-101.
[7] Whitney J D, Smerage G H, Block W A. Dynamic analysis of a trunk shaker-post system [J]. Transactions of the ASAE,1990, 33(4): 1066-1070.
[8] Horvath E, Sitkei G. Damping properties of plum trees shaken at their trunks [J]. Transactions of the ASAE, 2005,48(1): 19-25.
[9] Horvath E, Sitkei G. Energy consumption of selected tree shakers under different operational conditions [J]. Journal of Agricultural Engineering Research, 2001, 80(2): 191-199.
[10] Láng Z. A fruit tree stability model for static and dynamic loading [J]. Biosystems Engineering, 2003, 85(4): 461-466.
[11] Láng Z. Dynamic modelling structure of a fruit tree for inertial shaker system design [J]. Biosystems Engineering,2006, 93(1): 35-44.
[12] Láng Z. A one degree of freedom damped fruit tree model[J].Agricultural Engineering International Cigr Journal, 2008,51(3): 823-829.
[13] Bentaher H, Haddar M, Fakhfakh T, et al. Finite elements modeling of olive tree mechanical harvesting using different shakers[J]. Trees, 2013, 27(6): 1537-1545.
[14] Du X, Chen D, Zhang Q, et al. Dynamic responses of sweet cherry trees under vibratory excitations[J]. Biosystems Engineering, 2012, 111(3): 305-314.
[15] 杜小強, 倪柯楠, 潘珂, 等. 可調振幅單向拽振式林果采收機構參數優化[J]. 農業工程學報, 2014, 30(16):25-32.Du Xiaoqiang, Ni Kenan, Pan Ke, et al. Parameter optimization of stroke-adjustable and monodirectional pulling fruit harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014,30(16): 25-32. (in Chinese with English abstract)
[16] Wu C, He L, Du X, et al. 3D reconstruction of Chinese hickory tree for dynamics analysis[J]. Biosystems Engineering, 2014, 119(1): 69-79.
[17] 杜小強, 李松濤, 賀磊盈, 等. 三維激振果品采收機構優化設計與試驗[J]. 農業工程學報, 2017, 33(16): 48-55.Du Xiaoqiang, Li Songtao, He Leiying, et al. Optimal design and experiment on vibratory fruit harvesting mechanism with three-dimensional excitation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(16): 48-55. (in Chinese with English abstract)
[18] 蔡菲, 王春耀, 王學農, 等. 基于高速攝像技術的振動落果慣性力研究[J]. 西北農林科技大學學報: 自然科學版,2013, 4: 208-212.Cai Fei, Wang Chunyao, Wang Xuenong, et al. Inertia of fruits abscised by vibration based on high-speed video camera technology[J]. Journal of Northwest A&F University:Nat. Sci. Ed, 2013, 4: 208-212. (in Chinese with English abstract)
[19] 劉子龍, 王春耀, 羅建清, 等. “Y”型果樹動力學模型仿真及試驗的研究[J]. 農機化研究, 2017, 39(8): 154-158.Liu Zilong, Wang Chunyao, Luo Jianqing, et al. " Y" type of fruit tree dynamic model simulation and experimental research[J]. Research on Agricultural Mechanization, 2017,39(8): 154-158. (in Chinese with English abstract)
[20] 呂夢璐, 王春耀, 羅建清, 等. 基于ANSYS對振動果樹枝干“Y”型響應的研究[J]. 農機化研究, 2017, 39(2): 37-41.Lü Menglu, Wang Chunyao, Luo Jianqing, et al. The finite element analysis of the vibration of fruit trees based on ANSYS workbench[J]. Research on Agricultural Mechanization, 2017, 39(2): 37-41. (in Chinese with English abstract)
[21] 魏庭鵬, 王春耀, 閔磊, 等. 基于 MATLAB對"Y型"果樹振動共振頻率的研究[J]. 江蘇農業科學, 2017, 45(3): 169-172.Wei Tingpeng, Wang Chunyao, Min Lei, et al. The resonance frequency of the vibration of fruit trees based on MATLAB[J]. Jiangsu Agricultural Sciences, 2017, 45(3):169-172. (in Chinese with English abstract)
[22] 劉子龍, 王春耀, 許正芳, 等. 海棠果樹動力學特性的研究[J]. 農機化研究, 2017, 39(12): 165-169.Liu Zilong, Wang Chunyao, Xu Zhengfang, et al. Study on the dynamic characteristics of begonia fruit trees[J]. Research on Agricultural Mechanization, 2017, 39(12): 165-169. (in Chinese with English abstract)
[23] 張智, 王春耀, 劉子龍, 等. Y型果樹的沖擊試驗[J]. 新疆大學學報:自然科學版, 2017, 34(2): 237-241.Zhang Zhi, Wang Chunyao, Liu Zilong, et al. Y-type fruit tree impact test[J]. Journal of Xinjiang University: Natural Science Edition, 2017, 34(2): 237-241. (in Chinese with English abstract)
[24] 湯智輝, 賈首星, 沈從舉, 等. VIBROLIV干果采收機的引進與試驗[J]. 新疆農機化, 2009 (4): 38-40.
[25] 湯智輝, 沈從舉, 孟祥金, 等. 4YS-24型紅棗收獲機的研制[J]. 新疆農機化, 2010(1): 30-32.
[26] 湯智輝, 孟祥金, 沈從舉, 等. 機械振動式林果采收機的設計與試驗研究[J]. 農機化研究, 2010, 32(8): 65-69.Tang Zhihui, Meng Xiangjin, Shen Congju, et al. Design and experimental investigation of mechanical vibration tree fruits and nuts harvester[J]. Research on Agricultural Mechanization, 2010, 32(8): 65-69. (in Chinese with English abstract)
[27] 喬園園, 牛長河, 孟詳金, 等. 牽引式林果振動采收機的設計與田間試驗[J]. 新疆農業科學, 2015, 52(3): 528-534.Qiao Yuanyuan, Niu Changhe, Meng Xiangjin, et al. Design of traction type fruit harvest machine and its experimental research in fields[J]. Xinjiang Agricultural Sciences, 2015,52(3): 528-534. (in Chinese with English abstract)
[28] 張合軍, 王軍瑋. 幾種常用偏心塊偏心矩及其激振力的計算分析[J]. 礦山機械, 1999, 27(6): 68-68.
[29] 劉延柱, 陳文良, 陳立群. 振動力學[M]. 北京: 高等教育出版社, 1998.
[30] 中國國家標準化管理委員會. GB/T 1931-2009 木材含水率測定方法[S]. 北京: 中國標準出版社, 2009.
[31] 中國國家標準化管理委員會. GB/T 1938-2009 木材順紋抗拉強度試驗方法[S]. 北京: 中國標準出版社, 2009.
[32] Erdogan D, Guner M, Dursun E, Gezer I. Mechanical harvesting of apricots[J]. Biosystems Engineering, 2003,85(1): 19-28.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40