康復(fù)機(jī)器人在平衡訓(xùn)練中的應(yīng)用現(xiàn)狀及優(yōu)化方案
2018-05-07 06:39:44韋宇煒何梓秋何漢武王俊華曾科學(xué)
裝備制造技術(shù) 2018年2期
韋宇煒,何梓秋,何漢武,王俊華,曾科學(xué)
(1.廣東工業(yè)大學(xué),廣東 廣州 510006;2.廣東省第二中醫(yī)院,廣東 廣州 510095)
0 引言
腦卒中傳統(tǒng)的康復(fù)治療分為急性期的康復(fù)治療和恢復(fù)期的康復(fù)治療。恢復(fù)期的康復(fù)治療按照順序分為:床上訓(xùn)練、坐起及座位平衡訓(xùn)練、從座位到站起訓(xùn)練、站立及站立平衡訓(xùn)練、步行訓(xùn)練、上肢及手功能訓(xùn)練、作業(yè)治療訓(xùn)練等。其中,平衡訓(xùn)練占有非常重要的地位。平衡能力作為行走功能的基礎(chǔ),對(duì)于患者的站立行走康復(fù)有極大的幫助,是康復(fù)治療中極其重要的一環(huán)。
對(duì)于平衡康復(fù)的訓(xùn)練,一種方法是通過單獨(dú)訓(xùn)練患者的平衡能力,使患者在無平衡能力狀態(tài)下逐步實(shí)現(xiàn)靜態(tài)平衡,進(jìn)而實(shí)現(xiàn)自動(dòng)態(tài)平衡和他動(dòng)態(tài)平衡,此種設(shè)備的評(píng)估參數(shù)主要為平衡能力參數(shù),在患者達(dá)到平衡能力要求后可能還需要進(jìn)一步對(duì)步態(tài)進(jìn)行訓(xùn)練。另外一種方法則主要體現(xiàn)在下肢訓(xùn)練方面,使患者在下肢康復(fù)的過程中逐步掌握平衡的能力和技巧[1],達(dá)到平衡與行走同步進(jìn)行的效果,訓(xùn)練效率較高。
本文通過介紹目前市面上的幾種較先進(jìn)的下肢康復(fù)訓(xùn)練機(jī)器人,分析目前下肢康復(fù)機(jī)器人在平衡康復(fù)訓(xùn)練中所存在的不足。以消除目前所存在的不足為目標(biāo),設(shè)計(jì)出一套優(yōu)化方案,使下肢康復(fù)機(jī)器人運(yùn)用于平衡康復(fù)訓(xùn)練時(shí)更加具有通用性和有效性。
1 平衡康復(fù)訓(xùn)練機(jī)器人的研究的現(xiàn)狀
康復(fù)機(jī)器人的研究真正起步于20世紀(jì)80年代,到90年代得到了全面的發(fā)展。美國(guó)、英國(guó)、日本、德國(guó)等國(guó)家在康復(fù)訓(xùn)練機(jī)器人領(lǐng)域有著最領(lǐng)先的研究,而我國(guó)研究工作起步較晚,現(xiàn)處在初步發(fā)展階段,不過目前清華大學(xué)、上海交通大學(xué)、復(fù)旦大學(xué)、哈爾濱工業(yè)大學(xué)等多家大學(xué)已經(jīng)開展關(guān)于康復(fù)訓(xùn)練機(jī)器人的研究[2]。下文將介紹幾種較典型的用于平衡康復(fù)訓(xùn)練的機(jī)器人。
Betec公司生產(chǎn)了一種Bertec's Balance Check TM系統(tǒng)平衡臺(tái),如圖1所示,可以用于平衡失調(diào)病人康復(fù)訓(xùn)練以及運(yùn)動(dòng)員訓(xùn)練以提高自身競(jìng)技水平,該平衡板可以測(cè)量垂直方向的力和中心壓強(qiáng)(CoP)。設(shè)備可以像地毯一樣鋪在地板上,易于操作和使用,適用于身體姿態(tài)控制和其它人體平衡研究。Bertec平衡板可單獨(dú)使用或作為BalanceCheckTM系統(tǒng)的一部分使用。設(shè)備采用16-bit數(shù)字技術(shù),通過USB數(shù)據(jù)線與安裝有數(shù)據(jù)采集軟件的計(jì)算機(jī)相連。可以用此設(shè)備作為一種研究工具,獲取相應(yīng)信息。

圖1 Betec測(cè)力訓(xùn)練平臺(tái)
德國(guó)生產(chǎn)的MEDICA主被動(dòng)站立步行訓(xùn)練系統(tǒng)BALANCE-Trainer可為病人提供部分或完全的靜態(tài)站立及安全的動(dòng)態(tài)站立訓(xùn)練,可根據(jù)病人情況調(diào)整訓(xùn)練強(qiáng)度,基于隨機(jī)的訓(xùn)練軟件,最大程度的激發(fā)病人潛在的站立,平衡及認(rèn)知功能,如圖2所示。此系統(tǒng)具有七級(jí)可調(diào)的訓(xùn)練強(qiáng)度和傾斜角度可調(diào)整的作業(yè)臺(tái),能夠進(jìn)行靜態(tài)站立、動(dòng)態(tài)站立、穩(wěn)定性訓(xùn)練三種訓(xùn)練模式,同時(shí)具有相應(yīng)的站立穩(wěn)定性評(píng)估訓(xùn)練軟件,通過位移感應(yīng)器可動(dòng)態(tài)測(cè)量站立穩(wěn)定性及軀干傾斜角度,給予評(píng)估結(jié)果。
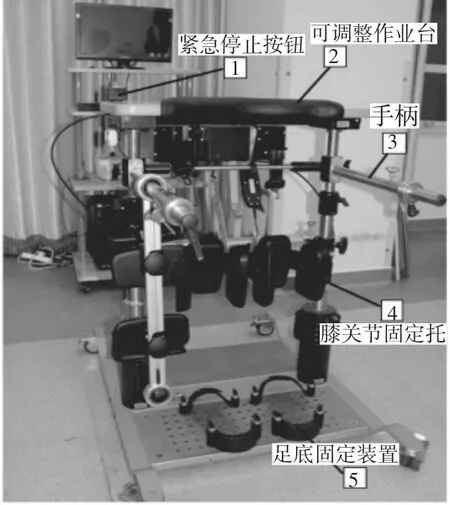
圖2 MEDICA測(cè)力訓(xùn)練平臺(tái)
瑞士Kistier公司生產(chǎn)了一種測(cè)力平臺(tái),如圖3所示。其便攜式鋁制板面用于測(cè)量地面反作用力、力矩以及壓力中心等生物力學(xué)指標(biāo)。此測(cè)力臺(tái)主要在步態(tài)、平衡分析以及技術(shù)動(dòng)作診斷和訓(xùn)練監(jiān)控中使用。它內(nèi)置放大器產(chǎn)品,可以與所有常用運(yùn)動(dòng)學(xué)、生物學(xué)(肌電)采集分析系統(tǒng)同步使用。另外,此測(cè)力臺(tái)有較寬的量程(0~10kN),但其在整個(gè)應(yīng)用范圍仍具有高精度和高線性度。另外,其具有對(duì)靜態(tài)負(fù)荷高達(dá)12 kN的超載保護(hù)保障。由于壓電式傳感器的特殊性能,測(cè)力臺(tái)具有很高的靈敏度,可以在測(cè)量較大量程同時(shí)測(cè)量微小的動(dòng)態(tài)現(xiàn)象,在大量程時(shí)可以精確地測(cè)量到微小的力。
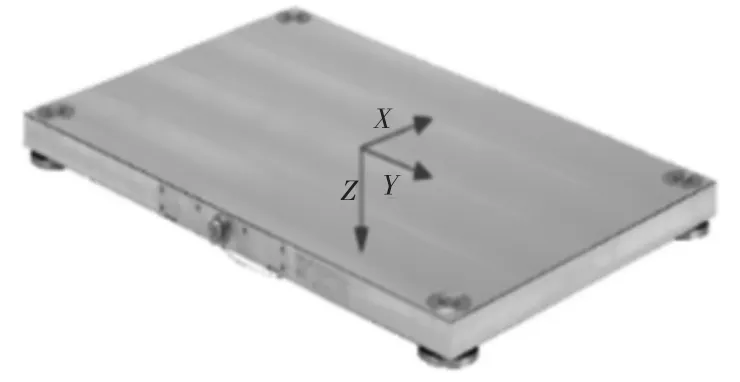
圖3 Kistier測(cè)力訓(xùn)練平臺(tái)
除上述幾種平衡康復(fù)訓(xùn)練機(jī)器人外,現(xiàn)在市面上還有瑞士的Lokomat[2]、日本的Makikawa等多種平衡康復(fù)訓(xùn)練機(jī)器人,本文不再展開介紹。
2 平衡康復(fù)訓(xùn)練機(jī)器人仍存在的問題分析
目前,平衡康復(fù)訓(xùn)練機(jī)器人的發(fā)展已經(jīng)由初步探索逐步走向智能化和人性化,國(guó)外發(fā)達(dá)工業(yè)國(guó)家已經(jīng)將其作為一種產(chǎn)業(yè)并逐步實(shí)現(xiàn)了規(guī)模生產(chǎn),而國(guó)內(nèi)也正在由學(xué)術(shù)理論研究向市場(chǎng)生產(chǎn)靠攏,但根據(jù)上述國(guó)內(nèi)外康復(fù)訓(xùn)練機(jī)器人研究現(xiàn)狀的分析,仍然存在著很多不足的地方,需要進(jìn)一步完善和改進(jìn)。
(1)醫(yī)療機(jī)器人制造成本與可用性之間的矛盾
目前所制造的大型康復(fù)機(jī)器人成本一般較高,例如瑞士蘇黎世聯(lián)邦工業(yè)大學(xué)與hocoma公司合作研制了四自由度外骨骼式步態(tài)康復(fù)訓(xùn)練機(jī)器人Lokomat,雖然已經(jīng)有100多臺(tái)Lokomat系統(tǒng)在世界有名的康復(fù)醫(yī)院和研究所成功地投入使用[3],但其售價(jià)達(dá)300萬人民幣每臺(tái),百萬元以上的價(jià)格,一些中小型醫(yī)院無力購買,個(gè)人用戶更是消費(fèi)不起。很多醫(yī)院及康復(fù)機(jī)構(gòu)還是難以承受;而價(jià)格適中的一些康復(fù)設(shè)備,僅僅是借助跑步機(jī)、懸吊系統(tǒng)等幫助患者進(jìn)行康復(fù)訓(xùn)練,這類康復(fù)訓(xùn)練器械在康復(fù)訓(xùn)練過程中可能還需要專業(yè)人員的幫助,還不能完全稱作平衡康復(fù)機(jī)器人。
(2)設(shè)備難以普及,后期維護(hù)維修困難
由于醫(yī)療器械市場(chǎng)準(zhǔn)入制度嚴(yán)格,企業(yè)力所不及,大企業(yè)嫌棄高難度利潤(rùn)低,且大型設(shè)備對(duì)于普通家庭安裝困難,使得下肢平衡康復(fù)訓(xùn)練機(jī)器人普及于大多數(shù)患者家庭的目標(biāo)在短期內(nèi)無法完成;對(duì)于高端的下肢康復(fù)機(jī)器人,關(guān)鍵技術(shù)還不夠成熟,有些構(gòu)造部件的生產(chǎn)來自于國(guó)外,具有技術(shù)保密權(quán)力;國(guó)內(nèi)的生產(chǎn)廠家大多受困于規(guī)模,針對(duì)項(xiàng)目缺乏專項(xiàng)研究和后續(xù)開發(fā),僅是仿造國(guó)外低端產(chǎn)品,導(dǎo)致設(shè)備故障后的維修困難,甚至出現(xiàn)無法維修的狀況。
(3)對(duì)患者肢體動(dòng)作準(zhǔn)確性量化困難
大多數(shù)下肢平衡康復(fù)機(jī)器人僅僅能夠?qū)颊叩膭?dòng)作做出一個(gè)記錄,但對(duì)患者的動(dòng)作準(zhǔn)確性難以判斷,如何對(duì)治療進(jìn)行一個(gè)合理的評(píng)估還是需要醫(yī)師的指導(dǎo),對(duì)患者動(dòng)作是否標(biāo)準(zhǔn)和是否有進(jìn)步評(píng)判不準(zhǔn)確[4]。同時(shí)在患者的運(yùn)動(dòng)過程中,機(jī)器人對(duì)患者的誤操作和巧合性動(dòng)作難以區(qū)分,致使評(píng)判結(jié)果不準(zhǔn)確,可信度不高。
(4)康復(fù)訓(xùn)練模式適用面較窄
患者的康復(fù)過程分為三個(gè)時(shí)期:康復(fù)初期,需要采用被動(dòng)訓(xùn)練模式;痙攣期,目的是緩解和消除關(guān)節(jié)痙攣,需要對(duì)患肢進(jìn)行抗痙攣訓(xùn)練[5];康復(fù)后期,關(guān)節(jié)分離運(yùn)動(dòng)已經(jīng)完成,希望關(guān)節(jié)的協(xié)調(diào)性增強(qiáng),機(jī)器人要能提供主動(dòng)訓(xùn)練模式。目前現(xiàn)有的康復(fù)機(jī)器人雖然能對(duì)下肢運(yùn)動(dòng)功能障礙患者進(jìn)行訓(xùn)練,但是大部分機(jī)器人僅僅針對(duì)某種特定病情的患者具有很好的康復(fù)效果,并不能適用于整個(gè)康復(fù)過程。
(5)用戶體驗(yàn)感差,仿生性能不佳
雖然目前國(guó)內(nèi)對(duì)下肢康復(fù)醫(yī)療機(jī)器人的研究日趨成熟,但在設(shè)備的推廣和普及方面較為困難,原因之一就是大多數(shù)機(jī)器人的康復(fù)訓(xùn)練過程并不友好,患者穿戴時(shí)會(huì)感覺機(jī)器人到臃腫沉重,部分被動(dòng)訓(xùn)練機(jī)器人動(dòng)作柔化性較差,適應(yīng)性和體驗(yàn)感不佳,加快患者訓(xùn)練的疲勞感,降低患者訓(xùn)練興趣。
另外,針對(duì)不同類型的康復(fù)訓(xùn)練機(jī)器人,由于其在康復(fù)機(jī)理和運(yùn)動(dòng)控制方面各有不同[6],它們?cè)谀壳笆褂眠^程中所表現(xiàn)出來的弊端也存在差異,具體分析如下:
(1)對(duì)于足底踏板式下肢平衡康復(fù)訓(xùn)練機(jī)器人,其基本組成主要是兩套左右對(duì)稱布置的踏板機(jī)構(gòu),通過對(duì)正常人步行姿態(tài)的分析,來實(shí)現(xiàn)模擬人正常行走時(shí)足心的步態(tài)軌跡和足底姿態(tài),并利用一些機(jī)械約束實(shí)現(xiàn)步行時(shí)腳部運(yùn)動(dòng),故市場(chǎng)和社區(qū)常見的踏板式步行訓(xùn)練機(jī)器人多采用曲柄搖桿機(jī)構(gòu),但是所生產(chǎn)的設(shè)備均將踏板直接固定在連桿上來帶動(dòng)足底進(jìn)行步行訓(xùn)練,且踏板相對(duì)于腳掌為靜止?fàn)顟B(tài),無法對(duì)跖趾關(guān)節(jié)起到一個(gè)運(yùn)動(dòng)的作用,這種踏板姿態(tài)明顯與人正常步行時(shí)的足底運(yùn)動(dòng)姿態(tài)特征不符,若長(zhǎng)期使用其進(jìn)行訓(xùn)練,會(huì)對(duì)患者的步行姿態(tài)習(xí)慣造成不良的影響,甚至阻礙患者的康復(fù)訓(xùn)練過程。
(2)對(duì)于站立式減重步行康復(fù)機(jī)器人,其面向?qū)ο蟠蠖酁檫\(yùn)動(dòng)、車禍、腦卒中、骨科疾病等原因?qū)е碌南轮\(yùn)動(dòng)功能障礙患者,由于他們下肢的承重能力較差,因此需要在減重方式下進(jìn)行訓(xùn)練。在目前所生產(chǎn)的康復(fù)機(jī)器人中,大多數(shù)方案均是采用單一固定框架加吊帶的懸吊減重系統(tǒng),這種減重系統(tǒng)不具有自動(dòng)調(diào)節(jié)減重大小的功能[7],故存在減重力大小不準(zhǔn)確和操作繁瑣等問題,且由于吊帶的拉力過于集中,很容易會(huì)使患者感到不適,加快患者的訓(xùn)練疲勞感,降低患者的訓(xùn)練興趣。
3 優(yōu)化方案
從以上問題可以看出,當(dāng)前環(huán)境下,需要將現(xiàn)有的下肢康復(fù)機(jī)器人進(jìn)行調(diào)整,以便其能更好地投入市場(chǎng),總體優(yōu)化方案如下:
(1)改進(jìn)康復(fù)訓(xùn)練機(jī)器人的材料和體積,以便其能適應(yīng)個(gè)人使用,如可穿戴型康復(fù)設(shè)備[8,9]。
(2)降低康復(fù)訓(xùn)練儀的開發(fā)成本,使其更快地普及于普通家庭。
(3)加強(qiáng)康復(fù)訓(xùn)練儀的模塊化功能,做到集康復(fù)治療和輔助訓(xùn)練與一體。
(4)尋找合理有效的評(píng)估方案,使其評(píng)價(jià)更具科學(xué)性和指導(dǎo)性。
(5)加強(qiáng)人機(jī)之間的互動(dòng)體感[10],對(duì)患者的主動(dòng)訓(xùn)練和被動(dòng)訓(xùn)練能做出不同的反應(yīng),減少對(duì)患者的二次傷害。
另外,對(duì)于踏板式步態(tài)康復(fù)訓(xùn)練機(jī)器人足部機(jī)構(gòu)的優(yōu)化,可以在足底主踏板驅(qū)動(dòng)的基礎(chǔ)上,添加一個(gè)趾骨驅(qū)動(dòng)機(jī)構(gòu),以便其能夠更符合人在行走時(shí)的步態(tài)動(dòng)作,改進(jìn)方案如下:
足部機(jī)構(gòu)主要是由前腳板部分、后腳板部分、支撐柱部分、位置限制部分、彈簧拉回裝置組成前腳板和后腳板鉸接在一起構(gòu)成轉(zhuǎn)動(dòng)副。其結(jié)構(gòu)如圖4所示。

圖4 足部機(jī)構(gòu)優(yōu)化設(shè)計(jì)圖
其特征是:前腳板部分主要是由前腳踏板(8)組成,在踏板底部固定有長(zhǎng)彈簧軸(9),一端連接腳踏板凹槽部分,一端通過滑輪(10)與銷軸鉸鏈連接;后腳板部分主要是由后腳板踏板(16)組成,前腳踏板和后腳板踏板通過合頁(11)鉸接在一起,合頁通過緊固螺釘固定在前后腳踏板上,使得前后腳踏板有一定相對(duì)轉(zhuǎn)角,同時(shí)合頁的對(duì)轉(zhuǎn)角有一個(gè)限位作用。短彈簧軸(12)與長(zhǎng)彈簧軸(9)通過彈簧相連,起到使腳踏板保持平面的作用。在腳踏板的運(yùn)動(dòng)過程中,前腳踏板繞著合頁的軸線運(yùn)動(dòng),使得前后腳踏板形成一定的微小角度,達(dá)到趾骨在支撐期的彎曲效果;位置限定槽的槽面呈一定的角度,以達(dá)到真實(shí)的體現(xiàn)趾骨彎曲的角度。
4 總結(jié)與展望
下肢平衡康復(fù)訓(xùn)練機(jī)器人作為下肢康復(fù)治療的一種有效手段,能夠在一定程度上減輕人工負(fù)擔(dān),幫助患者快速康復(fù),提高患者在康復(fù)訓(xùn)練過程中的興趣[11]。因?yàn)槠淞己玫呐R床使用效果,引起了國(guó)內(nèi)外學(xué)者的廣泛關(guān)注,因此在近幾年得到了較快的發(fā)展。但由于目前的康復(fù)訓(xùn)練機(jī)器人均存在一些不足,在使用中均具有各自的局限性。因此,需要進(jìn)行相關(guān)技術(shù)的攻關(guān)。國(guó)內(nèi)外眾多學(xué)者正在進(jìn)行大量相關(guān)研究,旨在設(shè)計(jì)出更合理、更有效、更舒適的平衡康復(fù)訓(xùn)練機(jī)器人。因此,下肢平衡康復(fù)訓(xùn)練機(jī)器人有著廣闊的發(fā)展空間和良好的應(yīng)用前景,值得進(jìn)一步開發(fā)研究。
參考文獻(xiàn):
[1]劉洪濤.截癱患者下肢康復(fù)機(jī)器人設(shè)計(jì)與實(shí)驗(yàn)研究[D].秦皇島:燕山大學(xué),2010.
[2]Magagnin Valentina,Porta Albert,F(xiàn)usini Laura,et al.Eval uation of the autonomic response in healthy subjects during treadmill training with assistance of a robot-driven gait ortho sis[J].Gait&Posture,2009,29(3):504-508.
[3]Hocoma AG.LokomatRehabilitation Device [EB/OL].Volketswil,Switzerland:Hocoma AG Medical Engineering,2018[2018-03-12].https://www.hocoma.com/solutions/lokomat.[4]Galen S.S.,Clarke C.J.,Allan D.B.,et al.A portable gait assessment tool to record temporal gait parameters in SCI[J].Medical Engineering&Physics,2011(33):626-632.
[5]Deaconescu T,Deaconescu A.Pneumatic Muscle Actuated Isokinetic Equipment for the Rehabilitation of Patients with Disabilities of the Bearing Joints[C]//The International Multi Conference of Engineers and Computer Scientists.Hong Kong:IMECS,2009:21-25.
[6]Krebs H I,Volpe B T,Aisen M L,Hogan N.Increasing productivity and quality of care:Robot-aided neuro rehabili tation[J].Journal of rehabilitation research and development,2000,37(6):639-652.
[7]Ikeuchi Y,Ashihara J,Hiki Y,et al.Walking assist device with body weight support system[C]//2009 IEEE/RSJ Interna tional Conference on Intelligent Robots and Systems.St.Louis,MO,USA:IEEE,2009:4073-4079.
[8]AdamZoss,Kazerooni H,Chu Andrew.On the Mechanical Design of the Berkeley Lower Extremity Exoskeleton(BLEEX)[C]//The 2005 IEEE International Conference on Robotics and Automation.Barcelona,Spain:IEEE,2005:4338-4344.
[9]Sankai Yoshiyuki.Leading Edge of Cybernics:Robot Suit HAL[C]//SICE-ICASE International Joint Conference 2006.Busan,Korea:SICE-ICASE,2006:18-21.
[10]楊燦軍,陳 鷹,路雨祥.人機(jī)一體化智能系統(tǒng)理論及應(yīng)用研究探索[[J].機(jī)械工程學(xué)報(bào),2000,36(6):42-47.
[11]錢振美.臥式下肢康復(fù)機(jī)器人的研究[D].哈爾濱:哈爾濱工程大學(xué),2006.
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
廣東醫(yī)科大學(xué)學(xué)報(bào)(2020年6期)2020-02-06 06:00:56
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實(shí)用技術(shù)(2019年17期)2019-09-21 03:46:32
特別健康(2018年2期)2018-06-29 06:13:44
黃河之聲(2017年13期)2017-01-28 13:30:17
教育界·下旬(2016年4期)2016-11-19 22:15:52
中國(guó)衛(wèi)生(2014年6期)2014-11-10 02:30:50
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年23期)2014-03-01 04:33:45
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年22期)2014-03-01 04:33:14