識別無人機的無人值守光電告警系統*
2018-04-20 03:14:42殷宗迪宋秋冬
飛控與探測 2018年3期
關鍵詞:系統
殷宗迪,何 平,宋秋冬,朱 猛
(1.天津津航技術物理研究所·天津·300308;2.哈爾濱工業大學航天學院·哈爾濱·150001)
0 引 言
隨著無人機技術的高速發展和無人機產業的迅速擴張,無人機已經成為尋常百姓家中的常見電器。工信部在2017年12月印發的《關于促進和規范民用無人機制造業發展的指導意見》中指出,至2020年,我國民用無人機產業的產值將達到600億元。無人機產業的快速擴張令還沒有建立完善法律制度的巨大市場充滿危機與混亂。無人機在機場、重要會場和涉密工業場所肆無忌憚的“黑飛”,嚴重損害了我國人民的人身安全、信息安全和財產安全。為此,近年來,為保障我國重大涉密工業場所和交通樞紐等重要區域的安全,我國正在積極建設反無人機的安防系統。
1 國內外反無人機系統簡析
當前,針對無人機的安防技術手段主要可分為3大類:干擾屏蔽類反無人機裝備、捕捉擊毀類反無人機裝備、監測反制類反無人機裝備,具體的實現形式主要包括激光炮、信號干擾、信號欺騙、聲波干擾、黑客技術、無線電控制,以及反無人機無人機等[1]。其中,光電系統是反無人機系統的前端組件,其輸出結果可最直觀地反應目標情況的圖像信息。在無人值守的智能化系統中,光電告警系統是全自動化的關鍵所在。在無人干預的情況下,只有在確定目標為來襲無人機時,安防系統的攔截措施才會啟動。因此,對于一套無人值守的反無人機系統而言,其光電告警系統的質量直接影響著整個系統的性能。下面將簡要介紹國內外主要的反無人機光電系統。
1.1 美國黑睿技術公司(Black Sage Technologies)——UAVX
美國黑睿技術公司運用人工智能技術,研制出了集無人機探測、識別、跟蹤功能于一體的UAVX系統。這套系統的特點是,能夠利用神經網絡識別目標,降低誤警率。其小型監視雷達的有效探測距離為500m,由白光攝像機和連續變焦紅外攝像機進行雙通道觀測,神經網絡識別算法在移動計算機上完成。其工作流程為探測、情報、分類和警告。首先,小型監視雷達負責對500m范圍內的無人機進行探測,并記錄下區域內的雷達反射數據樣本,同時由后臺數據庫比對數千種常見的無人機;在發現無人機后,系統控制可見光和紅外探測器視軸指向目標并進行跟蹤;系統會通過郵件進行告警,或者采取其他攔截措施。
1.2 由3家英國公司聯合開發的AUDS系統
AUDS系統由英國布萊特監視系統公司、象棋動力公司和恩特普賴斯控制系統公司3家英國公司聯合開發,是一套強大高效的、全集成式的反無人機防御系統。這套系統由A400系列的Ku波段電子掃描雷達、光電控制器、紅外探測器、可見光探測器、目標跟蹤軟件及電磁干擾器組成,可在固定路基或移動平臺上使用,可探測、跟蹤、分類、摧毀、干擾、壓制8km范圍內的無人機。
1.3 英國威能公司——“無人機觀察和捕捉”項目
該項目參考全息雷達技術,同時利用了光電攝像機,能夠探測和識別7km范圍內、質量小于27kg的小型無人機[2]。系統使用的全息雷達是由英國威能公司自主研制的靜態相控陣雷達,能夠對空域進行持續監視,發現并跟蹤非法無人機。在試驗中,全息雷達成功探測到了6.4km處的一架四軸飛行器。
1.4 以色列拉斐爾先進防御系統公司——Drone-Dome
Drone-Dome是由以色列拉斐爾先進防御系統公司開發的無人機探測、跟蹤和壓制系統。這套系統由MEOS光電傳感器、RPS-42戰術空中監視雷達和C-Guard信號干擾器組成。Drone-Dome與其他光電告警系統的不同之處在于,它不是通過發射射頻信號阻礙無人機與地面遙控裝置之間的通信聯絡,而是直接對全球導航衛星信號進行干擾,進而導致失控的無人機無法再回到違法者手中。
1.5 德國Dedrone GmbH公司——Drone-Tracker
Drone-Tracker系統由光電探測器、聲波、超聲波設備及攝像機組成。將設備安裝在建筑物外墻或固定位置上,可以通過聲波和超聲波對空域進行高效監視。當有非法無人機入侵時,計算機或智能手機上的數字地圖會實時顯示無人機的位置,視頻證據會被立即保留。
國內的反無人機系統還處于起步階段,目前,中國電子科技集團、上海資譽科技公司、天津津航技術物理研究所和中國工程物理研究院等科研單位都在研制反無人機系統。其中,天津津航技術物理研究所參與研制的系統是一套路基反無人機系統,該系統由高密度集成雷達、光電感知設備和電子干擾設備組成,可以實現全自動的探測、跟蹤、識別、壓制功能。本文介紹的識別無人機的無人值守光電告警系統,即為這個系統的重要組件。
2 識別無人機的光電告警系統的技術實現
本文介紹的無人機光電告警系統是全自動系統,與流程上端設備(雷達、頻譜偵察儀)及流程下端設備(干擾機)構成了一套完整的反無人機系統,其控制結構如圖1所示。雷達將可疑目標信息傳輸給中央控制器,中央控制器將目標信息轉化為目標相對于光電告警設備的方位角、俯仰角及距離信息。用于識別無人機的光電告警設備將轉動到指定位置以捕獲和跟蹤目標,可見光視場隨距離變遠而變小,并且能夠自動調焦以保證視場的清晰度。利用深度學習算法識別、捕獲目標,將目標識別類型和跟蹤視頻圖像由光電服務器傳輸至中央服務器。若識別類型為無人機,那么中央控制器的控制干擾器將攻擊入侵無人機,使其返航。軟件流程和圖像識別所使用的卷積神經網絡,是本套系統的技術實現基礎,本文在這里做出簡要介紹。

圖1 反無人機系統的全控制流程圖Fig.1 The full control flow chart of Anti-UAV system
2.1 識別無人機的光電告警系統的軟件流程
識別無人機的光電告警設備軟件由3部分組成:設備載荷上的紅外采集發送軟件、光電服務器上的服務器軟件,以及面向用戶的客戶端軟件。
圖2是紅外采集發送軟件的流程圖。紅外探測器獲取的紅外圖像在載荷中的微型計算機內被組合拼接為完整的紅外圖像,圖像由網口發送給光電服務器。
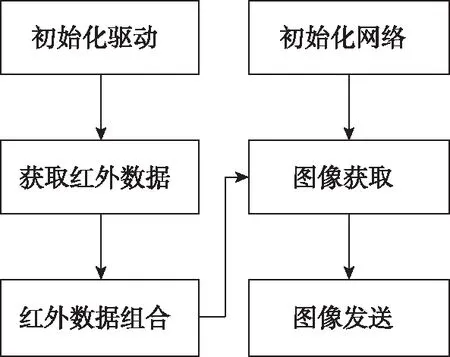
圖2 紅外采集發送軟件的流程圖Fig.2 The software flow chart of acquisition and transmission by infrared detectors
光電服務器負責接收由中央控制器轉發的、雷達輸出的目標信息,開啟可見光相機和紅外相機,并轉動轉臺偵察目標。在捕獲目標后,可見光探測器通過深度學習中的卷積神經網絡算法識別目標,紅外探測器通過TopHat算法進行小目標檢測,隨后融合兩者的檢測結果并實時識別、跟蹤目標,最終將識別結果和跟蹤視頻上傳至中央控制器。圖3是服務器軟件的流程圖。
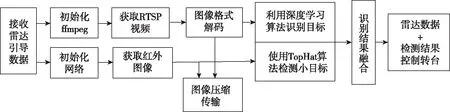
圖3 服務器軟件的流程圖Fig.3 The software flow chart of server
服務器將跟蹤視頻圖像傳輸至客戶端程序,客戶端可分為手動模式和自動模式2種。在正常情況下,客戶端為自動模式,即顯示服務器程序傳遞的可見光、紅外圖像和目標信息。當用戶將客戶端切換到手動模式,就可以通過搖桿手動控制轉臺轉動,以及執行可見光相機變焦等相關操作,客戶端的軟件流程如圖4所示。
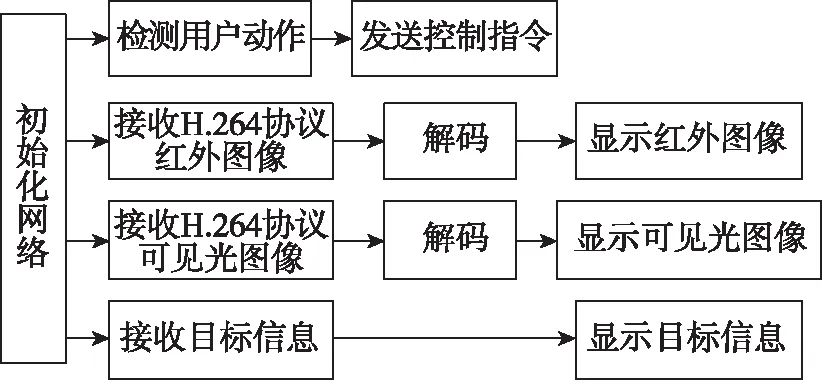
圖4 客戶端軟件流程圖Fig.4 The software flow chart of client
2.2 卷積神經網絡
卷積神經網絡利用一系列卷積層,構建了多層網絡,以模擬人腦在感知視覺信號時的逐層處理機制,進而獲得圖像的多層次特征。卷積層的卷積操作如式(1)所示。
(1)
其中,l代表模型的層數,H代表卷積核,Mk代表l-1層的第k個特征圖,b為輸出圖的偏置,f代表激活函數。
池化層解決了網絡輸出維數大、分類器設計難的問題。依據統計結果的相似性原理,以池化操作統計卷積得到的結果,進而減小了需要訓練的系統參數。
神經網絡的權值更新采用BP反向傳播算法,誤差可以被當作每個神經元的基的靈敏度,如式(2)所示。
(2)
其中,δ為基的靈敏度,T為閾值,δl為第l層的靈敏度,W為網絡層的維數。
BP算法基于梯度下降策略,以目標的負梯度方向對參數進行調整[4],可推導神經網絡的權值更新方程為
(3)
其中,η∈(0,1)為學習率。η的數值太大容易引起振蕩,η的數值太小則易導致收斂速度過慢。
3 光電告警系統的組成及作用
本文介紹的識別無人機的無人值守光電告警系統由可見光相機、長波非制冷型紅外傳感器、紅外圖像處理模塊、鏡頭、轉臺和中央服務器組成。采用可見光和紅外雙通道圖像傳輸是為了適應全天候的工作環境,可見光相機的探測距離較遠,但其受氣候影響較大,紅外相機在光線較弱和能見度較低時的探測效果較好。紅外相機選用了像元大小為17μm×17μm、像元數為640×512、幀頻為25Hz的長波非制冷型紅外相機。紅外鏡頭的焦距為240mm,F數為1.3。可見光相機的像元大小為3.3μm×3.3μm,像元數為1920×1080,可見光鏡頭的最大焦距為510mm。上述選擇,可保證紅外相機具備2km探測、1km識別的能力,可見光相機能夠實現4km探測、2km識別。紅外圖像處理模塊的功能是將紅外圖像壓縮并傳輸至中央服務器。中央服務器對紅外圖像和可見光圖像進行處理,利用人工智能算法,識別目標并進行跟蹤。光電告警設備的樣機如圖5所示。

(a)探測載荷部分 (a) The part of detection

(b)中央服務器(b) The central server圖5 光電告警設備的樣機Fig.5 UAV unmanned photoelectric warning system
3.1 無人機識別
本套系統的主要作用是識別入侵的目標類型,若識別結果為無人機,則將結果反饋給中心控制系統,同時將拍照和錄像結果傳輸至中央服務器留存,作為法律證據。隨后,中心控制系統將啟用電磁干擾機逼退入侵無人機。
無人機識別技術主要依賴于人工智能算法。人工智能算法在中央服務器中用于實時處理傳輸過來的圖像,其算法基于深度學習理論中的卷積神經網絡[3]。該算法在圖像識別中的應用優勢明顯,它的優點在于極大減少了參數數量,同時降低了模型的復雜度,提高了訓練效率,并且對類似于平移和縮放的變形具備高度的不變性。本系統網絡結構選用LeNet-5,分類器選用Softmax Regression,實際系統識別效果如圖6所示。由圖6可以看出,當前由可見光圖像實時識別的目標為無人機的概率為0.903575,而紅外圖像可直接將無人機目標用紅框標出。

(a)可見光識別圖像(a)Visible light recognition image

(b)紅外識別圖像(b) Infrared recognition image圖6 光電告警系統無人機識別效果圖Fig.6 The identification effect of UAV unmanned photoelectric warning system
3.2 目標跟蹤
在識別無人機后,光電系統會持續跟蹤無人機的飛行軌跡,直到達到系統探測的最大范圍(在正常天氣狀況下,可見光的探測范圍為4km,紅外探測的范圍為2km)。通過圖像識別,計算目標在當前圖像中的相對位置,再根據雷達傳輸的目標距離信息計算當前可見光的視場范圍,由目標在視場中的相對位置和當前視場大小,便可以推算出目標相對于轉臺的實際偏差角,進而轉動轉臺實現目標跟蹤。圖7是本套系統跟蹤無人機的效果圖。

(a)可見光跟蹤圖像(a)Visible light tracking image
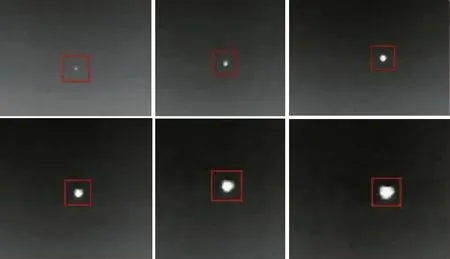
(b)紅外跟蹤圖像(b)Infrared tracking image圖7 光電告警系統的跟蹤效果圖Fig.7 The tracking effect of UAV unmanned photoelectric warning system
3.3 視頻監控
除了無人機識別和跟蹤能力外,系統還具有視頻監控功能。系統可設置為自動模式和手動模式,搭配搖桿可以手動轉動轉臺,可人工監控廠區范圍內的活動情況。視頻監控高清的圖像分辨率,使其可以在2km的廠區范圍內捕捉一切違法行為。遇到突發情況,保衛部門可以通過本套系統先行觀察事態發展,以采取相應的解決措施。若發現為虛假警報,就可以避免施行緊急措施所帶來的人力、物力損失,還可以減小外界輿論壓力。同時,光電系統保存在中央服務器中的視頻圖像是最有力的法律證據。圖8是視頻監控機場飛機的效果圖。
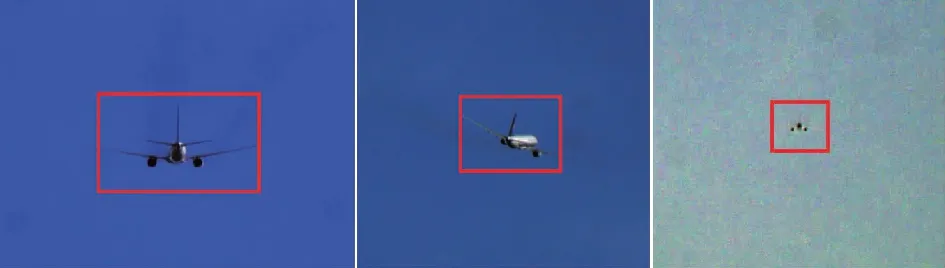
(a)可見光監控圖像(a)Visible light monitoring image

(b)紅外監控圖像(b) Infrared monitoring image圖8 視頻監控機場飛機的效果圖Fig.8 The effect of UAV unmanned photoelectric warning system in airport
4 結 論
本文分別從系統組成、工作特點及技術實現3方面詳細介紹了一種識別無人機的光電告警系統。該系統的優勢在于,基于深度學習算法的目標識別技術可以解放人力資源;可見光和紅外雙通道成像使得系統擁有全天候的工作能力;在同等重量級別的光電系統中,擁有較好的探測性能。同時,由于處于產品研制初期,這套系統在實際運行過程中仍存在著許多不足,現擬從2個方向提出未來的改進設想:
4.1 自身探測能力
在實際使用過程中,由于雷達給出的角度誤差較大、使得目標超出探測器視場范圍,導致系統無法捕獲目標。現階段常用的手段是邊界搜索策略,即通過附近小范圍的搜索以捕獲目標。但是,無目的的搜索引起的圖像抖動,增加了目標檢測方法的實現難度。因此,如果光電告警系統自身擁有探測能力,那么其安防成功率和效率均會大幅提升。
4.2 協同控制技術
為了實現目標的快速捕獲,本套識別無人機的光電告警系統安裝的紅外探測器選用了長波非制冷型。非制冷型紅外探測器的性價比較低(這里的性價比是指探測距離與探測器價格之間的比值),同時隨著探測距離的增加,探測器的價格呈指數增長趨勢。為了控制成本,在確保探測距離的前提下,未來擬采用由多個性能適中的小型光電告警系統協同布防的控制策略。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32