基于雙方態勢的機載光電探測系統的能力研究*
2018-04-20 03:14:42吳利榮劉小軍軒永波邊江楠
飛控與探測 2018年3期
關鍵詞:能力
王 領,吳利榮,劉小軍,軒永波,邊江楠
(北京航空工程技術研究中心·北京·100076)
0 引 言
作用距離是機載光電探測系統的綜合性能指標,目前國內外已有大量文獻對其進行了深入研究[1-4]。然而很多時候,這些研究針對的是機載光電探測系統靜態性能的理論研究估算。盡管作用距離模型已經考慮了復雜背景環境的影響,但對于作戰環境而言,其對實時性和動態性的考慮仍不充分,需要對其進行優化改進[5-8]。本文基于已有的理論研究成果,在充分考慮影響機載光電探測系統性能的基本因素之外,結合機載光電武器的作戰需要,在作戰環境下對機載光電探測系統的作戰能力進行了深入分析,得出了機載光電探測系統的最佳工作點及作用距離概率包線,為模擬真實的戰場環境和在實驗室進行試驗提供了一定的理論支撐。
1 有效探測范圍分析
在實際應用中,機載光電探測系統在作戰時往往是全程開啟、全程被使用的,因此有效探測范圍指的是以不低于一定作戰需求的概率發現目標的可信區域范圍。通常在作戰應用中,我機和敵機的相對運動關系可根據速度矢量的夾角分為迎頭探測和尾追探測2種情況。
機載光電探測系統的目標探測范圍如圖1所示。圖中R表示在迎頭探測時機載光電探測系統對目標的最大探測距離點,R′表示在尾追探測時對目標的最大探測距離點。根據目標的輻射特性可知,R′>R。φ表示機載光電探測系統在方位方向上搜索視場角的1/2,θ為機載光電探測系統探測器瞬時視場角的1/2。
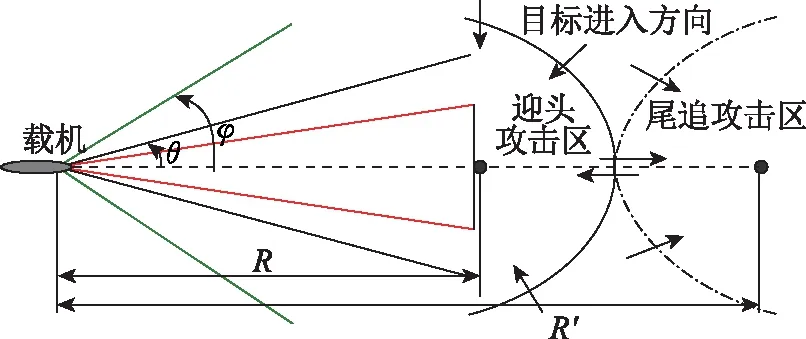
圖1 機載IRST的探測目標范圍示意圖Fig.1 Sketch diagram of detected range by airborne IRST
當目標從迎頭區域范圍接近載機時,機載光電探測系統對目標探測距離自然存在一個迎頭探測包線,在尾追情況下也自然形成尾追探測包線。根據距離探測能力和探測概率,能夠得到機載光電探測系統的探測能力范圍包線。由于目標與載機在不同空間內態勢的變化及目標紅外輻射的各向異性,探測概率包線也隨態勢變化而時刻變化。
2 作戰環境下的探測概率包線分析
為了考慮態勢在實際情況下的影響,需要首先建立基本戰場態勢,如圖2所示。

圖2 基本戰場態勢示意圖Fig.2 Basic battlefield situation indication
圖2中,α表示目標相對載機的方位角,轉角φ相當于進入角q,使用轉角φ可方便建模計算;為了反映作戰環境,引入θs和θt(θs∈[0°,360°],θt∈[0°,360°]),它們分別為載機與敵機的航向角,與轉角有緊密聯系。在實際戰場中,這2個參數是可測、已知的,且Δθ∈[0°,360°]。Δθ的取值可能是圖中的2種情況,以目標投影在載機坐標系中xt>0、yt>0(即第一象限)為例進行分析。在迎頭探測時(即π/2≤Δθ≤π、φ=π-|Δθ|時),目標相對載機的輻射強度為:
(1)
當π<Δθ≤3π/2、φ=π-(2π-|Δθ|)時,目標相對載機的輻射強度為:
(2)
(3)
上述內容均是單次搜索探測過程,而在實際應用中,每一次探測是存在概率特性的,這是由大氣背景輻射的易變性、系統噪聲、目標搜索概率等一系列概率事件所導致。機載光電探測系統探測目標信噪比越高,探測概率越高,相應的虛警概率就低。以迎頭探測為例,機載光電探測系統的信噪比SNR為:
(4)
并且,探測概率Pd、虛警概率Pf和SNR存在如下關系:
(5)
式中, erf(x)為誤差函數。圖3反映了信噪比、虛警概率和探測概率之間的關系。

圖3 信噪比、虛警概率和探測概率之間的關系Fig.3 Relationship between SNR, false alarm probability and detection probability
實際上,式(5)反映了機載光電探測系統的作用距離與探測概率之間的對應關系。對式(5)求導后可以發現,存在一個作用距離R,其對應著最大的探測概率[Pd]max,這就很好地驗證了機載光電探測系統存在著最佳工作開啟點。探測距離越小,信噪比越高,理論上探測概率值也就越高。但在實際應用中,目標距離越近,目標越容易逃出探測器視場,機載光電探測系統隨著目標快速移動,不容易跟蹤鎖定目標。考慮所有情況下的最佳工作開啟點,就得到了最佳開啟點探測概率包線;同樣,考慮所有情況下對應概率的最大作用距離Rmax,就得到了最大作用距離探測概率包線。
3 探測概率包線計算
根據上述數學模型進行實驗仿真,目標為某型戰斗機。按照其尺寸比例模型,計算出此飛機各個視圖的面積為:Syt=9.25m2,Sce=33.08m2,Sfe=106.12m2;假定目標機飛行速度Vt=408m/s,目標機噴口處尾焰平均半徑Rwz=0.51m,尾焰廢氣溫度T0=875K。在水平探測時,設定H1≈H2=8km;在角俯仰探測時,設定H1=8km,H2=10km;探測目標紅外波段為3~5μm,機載光電探測系統的探測器參數為:τs=0.9,Δf=105,Ad=2.25×10-8,A0=0.0154,δ=0.9,D*=2.0×1011。
當不考慮目標機相對載機的方位角、僅考慮進入角對探測能力的影響時,以目標機為中心的方位探測能力包線仿真結果如圖4所示。圖中0°表示載機與目標相對飛行,相對進入角為0°(即迎頭探測),而180°則表示機載光電探測系統對目標進行尾追探測。從圖4可以看出,方位探測能力包線并不是一般研究結果顯示的橢圓形,而是隨著相對進入角的不同而時刻變化。在迎頭探測時,進入角為0°。0°并不是最佳探測位置,最佳探測位置在±20°左右;同樣,在尾追探測時,180°也不是最佳探測位置,最佳探測位置在±170°左右;側面探測的效果最差。目標機的橫向速度相對較快,即距離變化快,容易逃脫機載光電探測系統的探測視場范圍。從圖4還可以看出,在考慮了探測概率因素時,得到的最大探測概率包線如圖4所示,圖中最大探測概率包線較最大作用距離包線要小,這也說明了機載IRST最佳工作開啟點應該選擇在最大探測概率包線上。
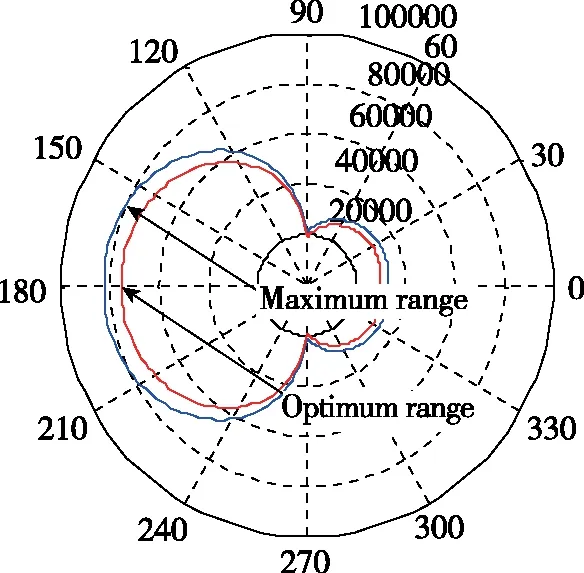
圖4 以目標為中心的方位角探測包線Fig.4 Target centered angle detection envelope
圖5反映的是以載機為中心對目標的方位角的迎頭探測,此時不考慮進入角的影響,圖中的0表示目標機相對載機的方位角為0°,僅表示目標在載機正前方。圖5中的部分探測能力包線是由實際機載光電探測系統的方位視場角±60°決定的,圖5同樣給出了機載光電探測系統最大作用距離包線和最大探測概率包線,它們都隨著方位角偏離0°而大致呈現出余弦規律的減小趨勢。
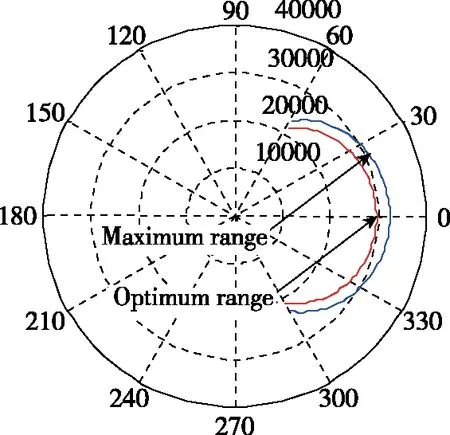
圖5 以載機為中心的方位角探測包線Fig.5 Angle detection envelope centered on a carrier
當角俯仰探測不考慮進入角的影響時,給出以載機為中心的俯仰角迎頭和尾追探測能力包線仿真結果如圖6和圖7所示。圖中的角度表示俯仰角,(0°,90°)為仰角,(270°,360°)為俯角。總體來看,尾追探測距離較迎頭探測遠,基本均呈現出一致的變化趨勢。從圖中可以看出,0°附近的探測效果最好。隨著仰角的增大,探測距離逐漸減小,且變化較慢。同樣,隨著俯角的增大(圖中為減小),探測距離也呈現出減小的趨勢。當到達一定的俯角后,探測距離減小較快,這是由于載機上方大氣層平均透過率較下方大氣層平均透過率小,而且下視探測更容易受到地面背景輻射的干擾,因而仰角探測距離變化較慢,而俯角探測距離變化較快。俯角越大,效果越明顯。
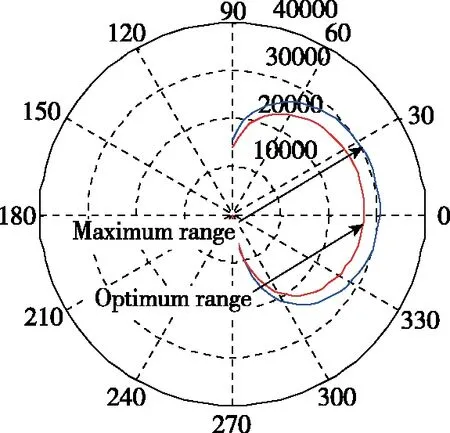
圖6 以載機為中心迎頭探測的俯仰包線Fig.6 The pitching envelope of head-on detection centered on a carrier
在實際應用環境中,機載光電系統在其被使用的過程中,既有純方位探測、純俯仰探測,而更多時候又有方位探測和俯仰探測同時存在的情形。這就需要綜合考慮各種態勢下方位探測和俯仰探測的概率包線,不同的概率包線構成了不同態勢下的概率包面。
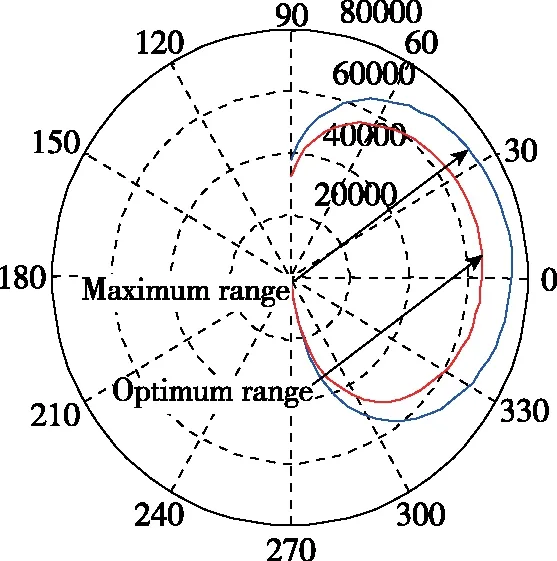
圖7 以載機為中心尾追探測的俯仰包線Fig.7 The pitching envelope of tail chase detectiondetected centered on a carrier
4 結 論
本文通過分析作戰環境下機載光電探測系統的探測能力,構建了機載光電探測系統方位角和俯仰角的探測能力包線模型,并以此為基礎結合作戰環境和探測概率特性,建立了作用距離探測概率包線模型。通過仿真分析可以發現,探測能力包線隨著相對進入角、方位角、俯仰角、背景輻射和系統性能的變化,而呈現出不同的變化規律,基本符合實際情況。同時,給出了最佳的探測方位。包線的研究能夠反映動態情況下的探測性能,從而體現機載光電探測系統在實際應用環境中的性能,為后續的性能評估打下基礎。
猜你喜歡
發明與創新(2022年30期)2022-10-03 08:40:56
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:58
意林(兒童繪本)(2020年2期)2021-01-07 02:12:04
動漫星空(興趣百科)(2020年12期)2020-12-12 05:31:40
作文成功之路·小學版(2020年5期)2020-06-11 12:48:46
意林(兒童繪本)(2019年9期)2019-10-15 08:51:46
中國生殖健康(2019年10期)2019-01-07 01:21:14
人大建設(2018年6期)2018-08-16 07:23:10
新高考(英語進階)(2018年1期)2018-04-18 14:00:11
文理導航·科普童話(2017年5期)2018-02-10 19:42:14