一種新型的橋梁主動防船撞監測預警系統
2018-04-10 05:57:20劉暢周曙張彩云
價值工程 2018年11期
劉暢 周曙 張彩云


摘要:本文介紹一種橋梁主動防船撞監測預警系統,包括視頻監控裝置、激光測高裝置、報警裝置以及主控機、集控中心。系統利用船舶的實時數據與軟件算法相結合,預警靈敏度更高,彌補了傳統的基于船舶交通管理系統和被動預防船舶撞擊設施在功能及效率上的局限性,實現了全監控的自動化,減少了人的工作量并保證了事故預警的可靠性。實用性更強,探測距離更遠,應急反應時間更長。
Abstract: This paper introduces a bridge active anti-ship collision monitoring and warning system, which includes video monitoring device, laser altimeter, alarm device, main control unit and centralized control center. The system combines ship real-time data with software algorithm, the warning sensitivity is higher, and it makes up for the limitation of traditional function and efficiency based on ship traffic management system and passive prevention of ship collision facilities, realizes the automatic monitoring, reduces the workload and ensures the reliability of accident warning. The utility model has the advantages of stronger practicability, longer detection distance and longer emergency response time.
關鍵詞:預警系統;視頻監控;激光測高;主控機;算法
Key words: warning system;video monitoring;laser altimeter;main control unit;algorithm
中圖分類號:TN954 文獻標識碼:A 文章編號:1006-4311(2018)11-0187-03
0 引言
目前通航水域的橋梁主動防撞技術和方法研究仍處于空白或起步階段[1],尚無適用的設計規范或標準。國內外現有的橋梁防船舶撞擊技術主要是基于被動防船撞系統和船舶交通管理系統(VTS)進行工作的。
被動防船撞系統主要是通過提高橋梁的抗力和增加緩沖裝置的方式來保證橋梁在發生船撞事件后具有足夠的抗力而不發生倒塌事故[2,3]。這種方式從一定程度上降低了船撞橋事故對橋梁的損傷,但不能避免事故的發生,且導致橋梁修建費用過高,很不經濟合理。船舶交通管理系統(VTS)的信息交換方法[4]主要采用高頻無線電話、傳真、VHF(Very High Frequency)通信等,系統信息交換流程重復繁瑣,工作效率極低。同時大量船舶駕駛人員詢問信息的電話咨詢會影響到值班人員的正常工作,從而會造成交通安全問題。
隨著計算機視覺、人工智能的發展,智能化的視頻監控系統逐漸普及,廣泛應用于人力監管范圍外的領域。基于計算機視覺的橋梁防撞主動預警系統應運而生,采用可見光與紅外光結合的復合探測、計算機視覺處理、電子信息技術等,實時獲取處理現場視頻數據,在復雜的內河航道背景下,監測船舶航行狀況,以主動預警的方式提前提醒船員及時輔助船舶航行,保證船舶正常通航,減小船撞橋事故發生的概率,避免事故所導致的巨額財產損失甚至生命損失。
1 橋梁主動防船撞監測預警系統設計
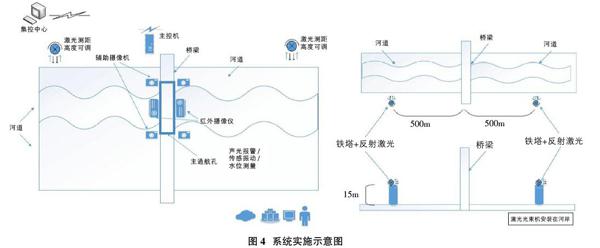
本文介紹的橋梁主動防船撞監測預警系統框架如圖1所示,系統包括視頻監控裝置、激光測高裝置、報警裝置以及主控機、集控中心,所述視頻監控裝置、激光測高裝置、報警裝置分別與主控機電連接,主控機與集控中心電連接,其中視頻監控設備用于完成對通航船只的偏航監測;激光測高裝置用于完成對通航船只的高度監測;主控機用于完成對通航船只運行狀態的存儲和處理;集控中心監測預警機制判斷是否向船舶發布預警信息或其他信息,實現對船舶通航的遠程監控。本文給出的橋梁主動防船撞監測預警系統,其視頻監控裝置包含有可見光成像系統、紅外熱成像系統和激光補光成像系統,以采用多光譜聯合檢測,根據不同可見程度及環境情況選擇不同的成像模式。視頻監控裝置還包括安裝于通航口兩側橋梁的輔助攝像機,以錄制船舶通航過程。激光測高裝置包括激光光束機,其激光束中心高度與通航孔允許最高凈空高度相同,以采用激光反射原理實現對通航船只的高度監測。報警裝置包括LED顯示屏、高音喇叭、照明燈、透霧燈及/或預警燈。通航船只的運行狀態包括船舶檢測、虛擬航道標定、船舶與橋梁相對位置、船舶與航道相對位置、預測船舶航線以及通航船只的偏航監測。
2 橋梁主動防船撞監測預警算法
2.1 橋梁主動防船撞監測預警算法流程
如圖2所示,本文提出一種新型的橋梁主動防船撞監測預警算法,具體流程實施如下:
①安裝于橋梁通航口的紅外攝像儀將監控水域的視頻信息傳輸至主控機內的監測預警軟件,該軟件通過船舶檢測算法探測監控水域是否有船舶通行[5]。若檢測到有船舶通行,則轉到步驟②和步驟⑤;否則繼續執行步驟①。
②當軟件判斷在監控水域有船舶通行,開啟激光測高模塊,主控機根據激光測高模塊探測的高度數據判斷目標船只是否超高。若檢測到目標船只超高,則轉到步驟③;否則轉到步驟④。
③當檢測到目標船只超高時,主控機啟動與其連接的報警裝置,LED顯示屏顯示“超高”,高音喇叭響,照明燈、透霧燈、預警燈亮。同時主控機記錄當前時間、截取該船只現場照片、船只狀態(超高)并存儲至數據庫。主控機發送船只超高信號至集控中心。集控中心計算機控制預警信息發布模塊廣播預警信息。
④當檢測到目標船只未超高時,主控機控制激光測高模塊進入休眠狀態。同時主控機記錄當前時間、截取該船只現場照片、船只狀態(未超高)并存儲至數據庫。
⑤當監控水域檢測到有船舶通行,系統軟件通過虛擬航道標定算法、測定船舶與橋梁相對位置算法、測定船舶與航道相對位置算法、預測船舶航線算法,判定目標船只是否有偏航(撞擊橋墩)的風險。若判定目標船只無偏航風險,則繼續執行步驟⑤,同時主控機記錄當前時間、截取該船只現場照片、船只狀態(未偏航)并存儲至數據庫。待該船舶離開監測區域后,返回步驟①。否則轉到步驟⑥。
⑥若判定目標船只有偏航風險,主控機啟動與其連接的報警裝置,LED顯示屏顯示“偏航”,高音喇叭響,照明燈、透霧燈、預警燈亮。同時主控機記錄當前時間、截取該船只現場照片、船只狀態(偏航)并存儲至數據庫。主控機發送船只偏航信號至集控中心。集控中心計算機控制預警信息發布模塊廣播預警信息。
當船只通過通航口時輔助攝像機啟動并錄制船只通航過程,進行存檔處理,便于事故鑒定預評價。本實例中船舶運行的狀態信息(超高/不超高,偏航/不偏航),LED顯示屏顯示信息,高音喇叭、照明燈、透霧燈、預警燈狀態,均顯示于橋梁主動防船撞監測預警系統軟件界面。本實施例中,所述集控中心計算機可通過網絡訪問主控機的監測預警系統,隨時對船舶通航狀況進行遠程監控。
2.2 基于張正友棋盤格標定法的虛擬航道繪制算法
張正友標定算法該方法介于傳統標定與自標定之間,標定過程操作簡便且精確度高。具體算法步驟:本地調用25幅從不同方向拍攝標定板的圖像,檢測標定板上各個角點,通過現實標定板角點與圖像平面中角點的關系計算攝像機的內參數、畸變系數,并優化求精;本地調用與攝像機光心距離為H1的水面放置的參考板(即標定板)的圖像,計算攝像機外參數。
2.3 前景檢測算法
在該前景檢測算法實施之前首先進行圖像預處理,限定檢測范圍并縮短處理時間,濾除圖像中由內河航道天氣、光線等自然干擾產生的噪聲。
基于三幀差分法與混合高斯背景差分法的前景檢測綜合算法[6]:三幀差分法的算法:讀取三幀相鄰的預處理圖像,即fk-2(x,y)、fk-1(x,y)、fk(x,y),對其進行差分運算,將差分圖像D1(x,y)、D2(x,y)自適應二值化OTSU、形態學處理、邏輯與運算后,得到三幀差分法的處理結果。
混合高斯背景法算法:輸入預處理的圖像,根據混合高斯背景模型進行背景建模,對圖像中每個像素建立K個高斯模型;背景選取,把每個像素的K個高斯分布從大到小排列,若分布越靠前,則該分布描述背景的可能性越大,反之則可能性越小,按閾值H選擇前面B個分布為背景像素模型(閾值H一般取經驗值0.75);混合高斯模型參數的更新和前景目標的提取,獲取當前幀,使各個像素值分別與所述的K個高斯分布匹配,若當前幀像素值與前B個高斯分布的任意一個匹配,則為背景像素;反之則為前景像素;對運動前景進行二值化、形態學處理即得到GMM算法檢測結果[7,8]。
3 橋梁主動防船撞監測預警系統具體實施方式
在本文所描述的橋梁主動防船撞監測預警系統的實施中,紅外攝像儀安裝在橋梁上,能根據不同可見程度及環境情況選擇不同的成像模式;輔助攝像機安裝于通航口兩側,記錄船只通過通航口的過程并進行存檔處理,便于事故鑒定與評價。激光測高裝置安裝于距通航口500m處航道兩側岸堤上,其激光束中心高度與通航孔允許最高凈空高度相同;報警裝置包括LED顯示屏、高音喇叭、照明燈、透霧燈、預警燈,安裝于橋梁上。主控機通過傳輸設備與視頻監控設備、激光測高裝置及報警裝置相連。集控中心通過網絡與主控機進行通訊。
4 創新性分析
本文提出的一種新型的橋梁主動防船撞監測預警系統,相較于現有的橋梁防撞技術,利用船舶的實時數據與軟件算法相結合,預警靈敏度更高,彌補了傳統基于船舶交通管理系統(VTS)和被動預防船舶撞擊設施的在功能及效率上局限性;實現了全天24小時監控的自動化,減少了人的工作量并保證了事故預警的可靠性;防超高探測距離可隨激光測距儀安裝位置改變而改變,實用性更強,探測距離更遠,應急反應時間更長;無需在船舶上安裝任何裝置,從而提高了普及性。
5 結語
本文提出新型的基于視頻監控的橋梁主動防船撞監測預警系統設計及其實施方案,采用硬件測量與算法分析相結合的主動預警的方式,達到提前提醒船員及時采取措施,輔助船舶航行,從而保證船舶正常通航,減小船撞橋事故發生的概率,為我國現有的橋梁防船舶撞擊技術領域提供了新思路,具有廣闊的應用前景和重要的現實意義。
參考文獻:
[1]李華文.關于防范船橋碰撞事故的思考[J].珠江水運,2011(24):73-74.
[2]沈自力.橋梁防船撞措施研究進展綜述[J].交通科技,2015(3):73-76.
[3]夏飛.橋梁防撞系統的發展[J].中國水運:理論版,2008,6(1):70-71.
[4]戚群.成山頭VTS中心雷達存在的問題和解決方案[C]//中國航海學會通信導航專業委員會2003學術年會論文集,2003.
[5]劉龍.基于海事監控平臺的船舶目標檢測與自主跟蹤系統的研究[D].湖南師范大學,2014.
[6]徐衛星,王蘭英,李秀娟.一種基于OpenCV實現的三幀差分運動目標檢測算法研究[J].計算機與數字工程,2011,39(11):141-144.
[7]王麗娟.基于OpenCV與混合高斯建模的運動目標檢測[J].電子測試,2009(9):86-90.
[8]張文,李榕,朱建武.基于混合高斯模型與三幀差分的目標檢測算法[J].現代電子技術,2012,35(8):57-60.