SLAM技術及其在測繪領域中的應用
2018-04-08 01:45:44佟國峰岳曉陽
測繪通報 2018年3期
黃 鶴,佟國峰,夏 亮,李 勇,岳曉陽,姜 斌
(1. 北京建筑大學測繪與城市空間信息學院,北京 102616; 2. 北京建筑大學北京未來城市設計高精尖創新 中心,北京 100044; 3. 東北大學信息科學與工程學院,遼寧 沈陽 110819; 4. 歐思徠(北京)智能科技有限公司,北京 102300)
電子學、信息學、電子計算機科學與空間科學等學科自身的不斷發展,極大地推動了包括測繪儀器設備在內的測繪領域各項技術的變革和進步,測繪儀器從早期的測繩、羅盤儀、游標經緯儀等經典測量工具,逐步發展成為電子經緯儀、數字水準儀、全站儀、GPS及各種電子專用儀器。20世紀60年代,電磁波測距儀的出現使長期以來只依靠觀測角度的測量方式發生了根本性變化,并且結合電子經緯儀形成了目前測繪領域中應用極為廣泛的全站儀。此外,微波測距儀、激光束準仗、激光掃平儀、數字水準儀、陀螺經緯儀等儀器的進步也推動了測繪技術的發展。20世紀70年代,除了用飛機進行航空攝影測量測繪地(形)圖外,還通過人造地球衛星拍攝地球照片,監測自然現象的變化,并且測繪地圖的精度也逐步提高。20世紀80年代,GPS問世,采用衛星直接進行空間點的三維定位引起了測繪行業的重大變革,為工程測量提供了嶄新的技術手段和方法。由于衛星定位具有全球、全天候、快速、高精度和無需建立高標等優點,被廣泛應用于大地測量、工程測量、地形測量及軍事的導航、定位上[1-3]。
常見的測角、測距、測高、定向、定位和繪圖通常是通過多余觀測或重復測量來保證精度和穩定性,勞動強度大、作業時間長。而長期以來用測角、測距、測水準為主體的常規地面定位技術,正逐步被以一次性確定三維坐標的、高速度、高效率、高精度的GPS技術所代替,同時定位范圍已從陸地和近海擴展到海洋和宇宙空間,定位方法已從靜態擴展到動態,定位服務領域已從導航和測繪領域擴展到國民經濟建設的廣闊領域。隨著計算機技術和數字地圖技術的發展,三維場景的信息采集與重構精度越來越高,其應用也越來越廣泛。傾斜攝影技術的發展,使得低空遙感平臺實現了低空數碼影像獲取,可以滿足大比例尺測圖、精度較高的城市三維建模等工程應用的需要。機載激光雷達(Airborne LiDAR)集激光掃描儀、GPS和慣性導航系統(INS)3種技術于一體,能夠直接得到高精度的三維坐標信息,與傳統的航空攝影測量方法相比,使用機載激光雷達技術可部分地穿透樹林遮擋,直接獲取地面點的高精度三維坐標數據,而且具有外業成本低、內業處理簡單等優點。然而,航空測量對于地面的信息缺失較多,尤其是在三維重建中,建筑物最底端的重建效果較差,因此,還需要以地面測繪系統重建的信息進行補充。地面移動測繪系統是指在移動載體平臺上集成多種傳感器,通過定位、定姿和成像等傳感器在移動狀態下自動采集各種定位定姿數據(GPS、INS)、影像數據和激光掃描數據,并通過統一的地理參考和攝影測量解析處理,實現無控制的空間地理信息采集與建庫。該系統將激光掃描得到的點云數據與數碼影像進行融合,能夠快速完成三維模型的紋理映射,由于省去了近景攝影測量中復雜的影像匹配步驟,可以顯著地提高工作效率。而地面場景的三維點云數據獲取一般分為兩種,移動式激光掃描和固定式激光掃描。目前,現有的地面移動測量系統通常是基于車載的移動測量系統的,但目前地面移動測量系統均需要依賴于全球衛星導航系統(global navigation satellite system,GNSS)和慣性導航系統,只能用于室外環境。然而,由于室內和地下空間等環境中沒有GNSS信號,因此,傳統的移動測量系統無法正常工作。固定式激光掃描可以用于室內室外的環境,但是復雜場景需要大量換站,然后進行點云拼接,數據獲取的效率十分低下。然而,即時定位與地圖構建(simultaneous localization and mapping,SLAM)技術在移動測繪方面具有較好的應用,如歐洲專利號為EP2913796A1的基于SLAM技術的推車,能夠對室內和室外的地面水平環境進行地圖構建和環境建模。因此,SLAM技術在測繪領域中的應用降低了測量復雜性,不需要大量標記地物點,不需要GPS信號,適用于在室內室外場景,對于解決傳統測繪中的定位及場景重建問題具有廣闊的前景。
SLAM技術是機器人領域的關鍵技術之一,是現代智能移動機器人系統的核心技術。SLAM解決的問題是移動機器人在未知的環境中利用自身裝載的傳感器獲取數據進行探索,通過觀測的數據,增量式地建立與環境相同的地圖,同時利用已經建立的環境模型計算出機器人的位姿。SLAM是機器人進入未知環境遇到的第一個問題,是路徑規劃及許多其他任務的前提,是實現機器人自主性的關鍵,是一個智能移動機器人進行其他一切后續動作和行為的技術依據。目前,SLAM技術在掃地機器人、家用機器人、無人機、智能手機、可穿戴設備等方面具有廣泛的應用。
SLAM技術在測繪領域的應用是一個新問題,目前有一些SLAM的綜述和教程,但基本都是對各類SLAM方法、原理和常規模塊的介紹,沒有SLAM技術在測繪領域中的應用論述。本文主要根據SLAM技術的發展現狀及其在測繪領域中的應用問題進行綜述,并且給出SLAM技術在測繪領域中應用的示例。
1 SLAM技術簡介
1.1 SLAM技術發展歷程
1986年以前,還未形成SLAM的概念,只在地圖已知的情況下研究定位問題。1986—1990年期間,Smith等對該問題進行了大量研究,并清楚地定義了SLAM,也稱為CML(concurrent mapping and localization),即時定位與地圖構建或并發建圖與定位[4]。
EKF(extended Kalman filter)模型主導時期,如Castellanos等[5]提出的基于圖像和激光在EKF框架的算法是以激光為主的定位;SeS等[6]利用雙目相機,提出在EKF框架下通過特征點運動估計的算法;Davison[7]利用單目相機,提出在EKF框架下最早的實時SLAM系統,成為之后許多單目系統的起源。但是EKF的方法具有一定的局限性,因此,又提出了粒子濾波(particle filter,PF)、RBPF(Rao-Blackwellised粒子濾波器)、UKF(unscented Kalman filter)等改進的方法[8-10]。
BA(bundle adjustment)轉型期:源于攝影幾何的BA算法,用于優化所有幀位姿約束的誤差。2000年引入SFM(structure from motion)到SLAM算法中,在計算機視覺領域,SFM技術與SLAM技術類似,早期的SFM技術一般是離線處理,后來研究出實時SFM技術應用到V-SLAM等,代表性工作主要有PTAM[11]和FrameSLAM[12]。
2010年之后,SLAM技術進入到前沿階段,涌現出大量成熟的系統和軟件,同時隨著各種傳感器的發展,出現了大量研究成果,如:HectorSLAM[13]、ORB-SLAM[14]、LSD-SLAM[15]、SVO[16]、RGB-DSLAM V2[17]和DTAM[18]等。
1.2 SLAM算法概述
SLAM算法主要分為3大部分:前端(又叫跟蹤或前端建圖,跟蹤又可以分成odometry loop closure)、后端、地圖創建。而SLAM算法按照傳感器的不同主要分為3大類:基于相機的SLAM算法、基于深度相機的SLAM算法、基于激光的SLAM算法。常用的傳感器有:單目相機、雙目/多目相機、全景相機、深度相機(RGB-D數據)、2D轉軸雷達、可裝戴設備等。其中,激光SLAM研究較早,理論和工程均比較成熟。視覺方案目前尚處于實驗室研究階段,極少看到實際產品應用。
如圖1所示,本文以RGB-DSLAM算法為例,介紹SLAM算法的關鍵步驟[19]。前端部分主要包含特征點提取、特征點匹配和運動估計;后端主要是優化部分,研究人員提出了g2o(general graph optimization),是一個用于求解圖優化問題的C++框架,專門用于求解圖優化問題。g2o框架中包含了3個線性求解器CSparse、CHOLMOD和PCG。CSparse和CHOLMOD求解器是基于Cholesky分解的方法,PCG是采用雅克比塊預條件器進行迭代的方法。這些求解器都包含了傳統的迭代優化方法Gauss-Newton或Levenberg-Marquardt(LM)思想。使用g2o框架包含的求解器求解該問題時,會給每個時刻的位姿一個初始估計值,保持求出的關鍵幀之間的運動關系不變,然后用梯度下降的方法來迭代,求解出使目標函數最小的優化變量。優化結束后將會得到機器人全局優化后的位姿、運動軌跡。在地圖創建部分,RGB-D方法獲得的地圖是彩色點云圖,創建過程是把關鍵幀對應的點云放置在同一個坐標系下的過程。創建完成后可以對點云地圖進行濾波、降采樣處理,分別用于保持精確度和節省存儲空間。
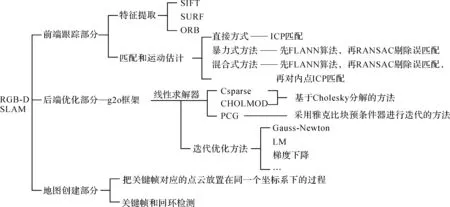
圖1 RGB-D SLAM關鍵步驟
按照算法處理的各個關鍵步驟的不同對SLAM技術進行劃分[25-27],可以得到如圖2所示的框圖。
對于SLAM算法構建出的地圖主要有以下幾種形式[28]:
(1) 路標地圖(landmark map):由環境中的3D特征點組成,如單目SLAM中基于特征的方法構建的地圖。其構建方法為:根據攝像機模型,把圖像2D特征點投影到世界坐標系下變為3D點。該地圖的優點為占存儲空間小、易擴展、易滿足實時創建要求。缺點為稀疏,可能導致無法識別地圖中的內容。
(2) 度量地圖(metricmap):盡可能精確地表達環境,包含了環境中許多細節,如距離、大小、顏色等,通常度量地圖都是基于一個全局坐標系創建的。通常指2D或3D的網格地圖,常見的有黑白或點云地圖,如RGB-D SLAM構建的點云圖、基于直接法的單目SLAM構建出的地圖。該地圖的優點為精度高,更適用于測繪,也適合于定位、導航和避障(點云地圖轉成OctoMap才能用于避障)。缺點為計算量大,構建困難,不易擴展,占用存儲空間大。
(3) 拓撲地圖(topological map):使用抽象的方式表達環境,圖中節點表示環境中具有顯著特征的地點,弧表示節點之間的關系。該地圖的優點為構建簡單、易擴展,比測量地圖占用的存儲空間小很多,適合路徑規劃。缺點為不能用于需要高精度地圖的場合,如避障。
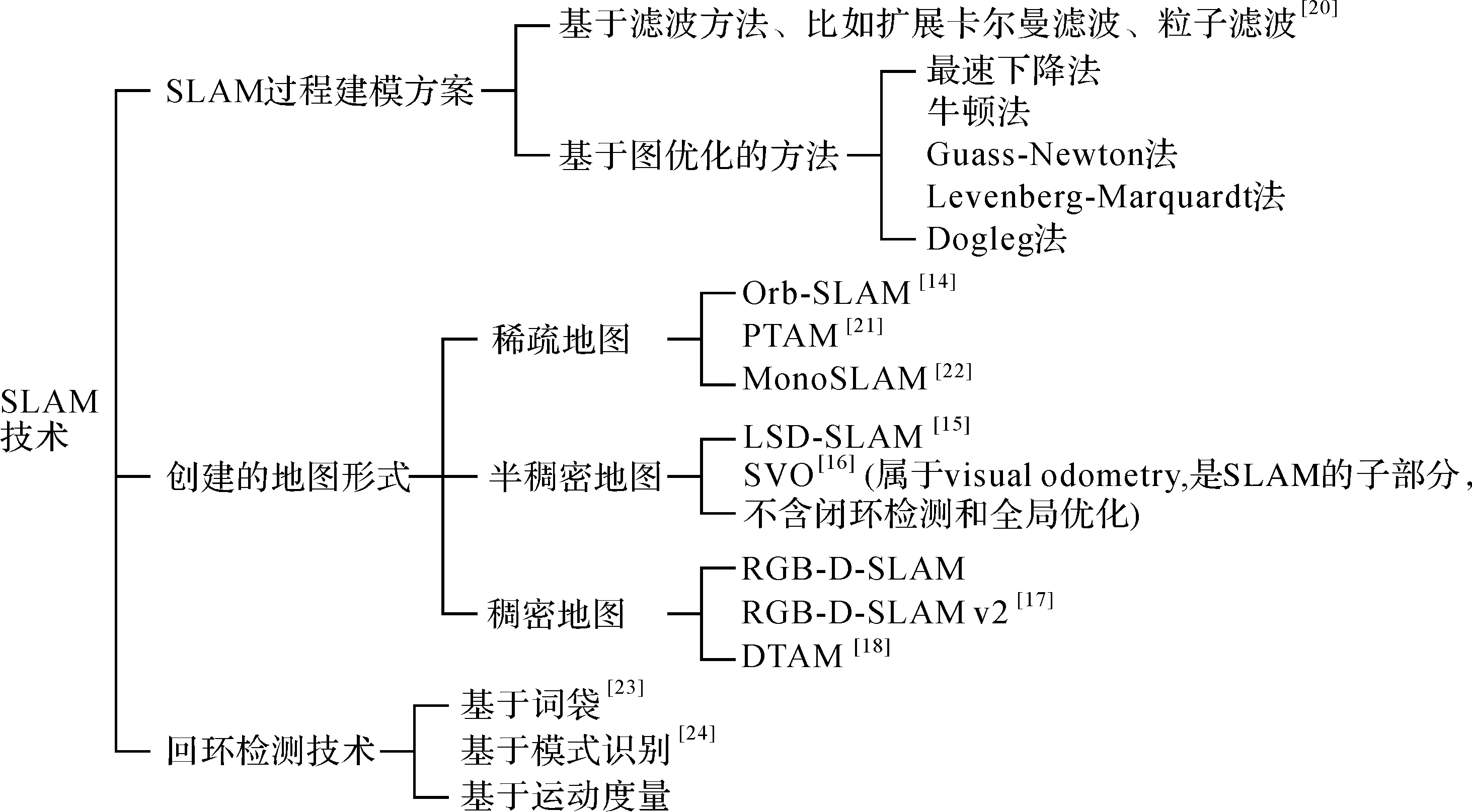
圖2 SLAM技術分類
(4) 混合地圖:這種地圖盡力結合度量地圖和拓撲地圖的優點。
2 SLAM技術的發展及應用
SLAM技術的一種簡單分類方法是按照移動機器人的空間移動方式劃分,即分為2D SLAM和3D SLAM。2D SLAM指的是機器人在二維平面上移動時進行的自定位和地圖繪制;而3D SLAM指的是機器人在三維空間里移動時進行的自定位和地圖繪制。
早期的機器人一般為輪式機器人,這類機器人都有類似的輪式結構作為行走機構,采用視覺傳感器或激光傳感器來進行環境感知。在比較光潔平整的室內地面環境下,它們的SLAM靠二維線陣激光傳感器完成,即采用2D SLAM技術。2D SLAM是一種在機器人領域十多年前就已經成熟的技術,目前已經很少有學者在這方面進行學術研究。因為它對工作環境有非常嚴重的依賴,并且精度不高。原則上,它要求二維激光傳感器絕對水平安裝,并且在機器人運動過程中保持激光傳感器的姿態水平,進而保證二維線陣激光傳感器的激光掃描面水平,否則會導致二維構圖失準并產生嚴重誤差。為了提高算法的適應性,往往給二維激光傳感器配一個IMU或AHRS等角度姿態傳感器,幫助矯正水平掃描激光由地面不平引起的掃描面不水平帶來的二維地圖構建錯誤問題。由于2D SLAM的先天技術架構局限性問題,它主要應用在低成本低精度的室內定位和構圖需求方案中,如現在流行的千元級產品清潔掃地機器人里面的基于激光傳感器的SLAM模塊。
為了解決2D SLAM技術的不足,研究人員開始提出3D SLAM技術,該技術是目前國際學術的研究熱點。機器人本體平臺的快速發展對SLAM技術的三維化提出了要求和挑戰。如目前在機器人領域非常著名的美國谷歌的機器人公司波士頓動力(Boston Dynamics)的雙足人形機器人Atlas上采用的就是3D SLAM技術,還有美國宇航局噴氣推進實驗室(NASA JPL)的猿形機器人RoboSimian的3D SLAM技術。
3D SLAM的實現手段是多樣的,在室內等小范圍環境識別和構圖方面,可以采用視覺傳感器,如單目或雙目攝像機、微軟的kinect或Intel的realsense類的RGB-D深度傳感器等。在室外大場景環境中的工業級應用往往采用激光和視覺傳感器結合的里程計方法等。3D SLAM技術是目前SLAM技術發展的方向,不僅在機器人領域,在VR(虛擬現實)、AR(增強現實)、室內高精地圖、室內定位與導航、人工智能和深度學習等相交叉的領域也是研究熱點,是不斷更新的技術。
最近由歐思徠(北京)智能科技有限公司研發的采用3D SLAM技術的激光影像背包式測繪機器人,可以爬山涉水、翻山越嶺,全空間、全地形地在運動中高精度建模,該技術解決了現有地面移動測量系統對GNSS信號的依賴問題,可以用于無GNSS信號的環境中進行移動測繪;相較于傳統的固定式激光雷達換站式掃描的測繪方法,該測繪機器人可以連續移動測量掃描,極大地提高了數據采集的效率,而且具有良好的機動性。相較于基于二維SLAM推車式的移動測繪系統只適用于地面水平的環境中,該測繪機器人能夠在各種復雜的環境下進行數據采集,操作簡單,可用于不同移動載體。
3D SLAM激光背包測繪機器人是一個背負式系統,當工作人員背負作業時,激光掃描儀的運動軌跡是一條與工作人員行走的步態有關的非線性和高動態的曲線。按照一般的理解,激光掃描儀如果安裝在移動測量系統中,一定要有一個高精度的定位系統(POS系統)與之匹配,這樣,激光掃描儀得到的激光點才能得到對應的位置和姿態數據,進而合成三維的激光點云。同時,常規的移動測量系統的載具在室外一般是汽車,而汽車由于采用四輪結構的底盤,因而其轉彎半徑受限,因此它的行駛軌跡往往是局部連續可微的平滑曲線。而同樣是基于激光的移動測量系統,3D SLAM激光背包測繪機器人既沒有GPS,也沒有IMU慣導,在如此高動態非線性的運動采集方式下,卻能獲得非常高精度的三維空間點云成果。為了能解算出激光點云數據的高動態非線性位姿,通過研究激光點云的處理算法,可從這些雜亂無章的點云中找到線索,求取其中隱含的更穩定的高階特征點和特征向量,并連續跟蹤這些特征點和特征向量,進而高精度地動態反向解算機器人的位置和姿態。然而,這種高精度的動態反向解算位置和姿態的方法顛覆的傳統的測繪方法,為測繪技術開拓了一種新的思路方法。
3 SLAM技術在測繪領域中應用的可能性
3.1 SLAM技術在測繪領域中的優勢
由于SLAM技術無需GNSS信號,對工作環境又有極強的適應性,基于SLAM技術的移動測量系統在多個測繪領域發揮作用,具體表現為:
(1) 外業數據采集速度極快,可快速獲得所需點云數據,數據精度高。
(2) 內業點云預處理時間短,自動化程度高,基本不需要人工干預,短時間便能獲得配準好的點云數據。
(3) 操作簡單方便,無需換站,連續采集,具有連貫性,可實現室內外一體化掃描作業。
(4) 基于SLAM技術的測繪移動測量機器人在任意環境中長時間工作故障率低,對于精度要求較高的重點區域,可與固定測站式三維激光系統配合使用,既能保證精度,又能保證效率。
3.2 應用案例
3.2.1室內外大比例尺一體化測圖及三維建模
通過空中航拍傾斜攝影手段,可以快速重建出大面積地面建筑模型。但是,由于地面植被覆蓋、城區高樓互相干涉遮擋等原因,采用傾斜攝影進行城市建模的方法對城市建筑模型的30 m以下底商部分,無法進行精模的制作。而采用3D SLAM自定位技術的激光影像背包測繪機器人,由于它的工作原理不依賴GPS+INS的組合慣導系統定位,可以以步行的方式穿過高樓林立和樹木遮擋等無GPS參考信號的城區進行數據采集,尤其是那些遠離主干道的建筑物、居民小區、企事業單位等傳統移動激光測量車不能到達的地方,進而得到非常精確的數據成果,包括室外建筑群的高精度結構數據、全景影像數據、三維模型和大比例尺地圖等。傾斜攝影三維建模的特點是宏觀大區域建模;3D SLAM激光影像背包測繪機器人的特點是微觀小范圍精細建模。兩者各有特點,互為補充。
如北京某施工完成待驗收建筑項目,主體建筑4棟高層,數據外業采集時間10 min,精度1 cm。原始點云數據(白模)如圖3(a)所示,實景著色圖像如圖3(b)所示。
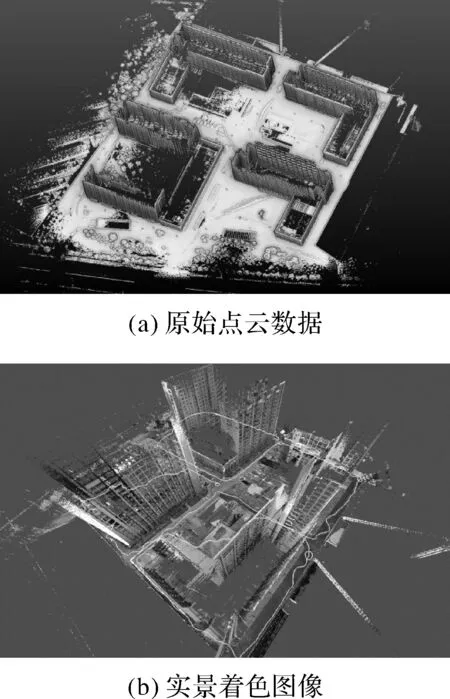
圖3 建筑物應用實例
通過與傾斜攝影測量技術相比,結合圖3所示效果,可以看到只有基于采用3D SLAM激光背包測繪機器人的步行方式所具有的高通過性才能保證在施工工地采集數據,其他方式如機動車車載、手推車車載等都無法勝任此類外業工作。
3.2.2室內外導航定位
3D SLAM激光影像背包測繪機器人具有采集方便、精度高、無需GPS信號等特點,可以為任何建筑物,包括住房、辦公室、商場、工業廠房、公共場所等進行高精度室內地圖構建,并且依據高精室內地圖在室內地下等無GPS信號覆蓋的環境中進行高精定位與導航。如圖4所示,為室內繪制結果。
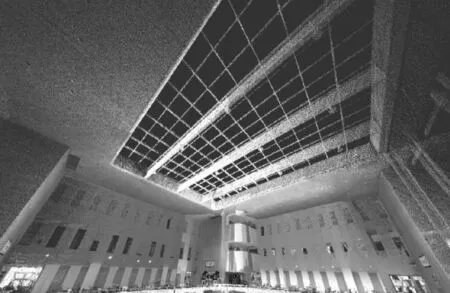
圖4 高精度室內地圖構建與定位導航結果
3.2.3建筑工程BIM
3D SLAM激光影像背包測繪機器人的特點包括高速的現場數據采集、高精度的數據處理和點云建模、POS自定位核心算法不依賴GPS信號和慣導的約束、室內/室外/地下/地上三維空間全地形作業等。這些特性非常適合建筑工程施工行業數據每日動態數據采集、項目施工全過程電子檔案生成、工程現場物資堆放空間規劃與管理、工程質量實時管控等BIM應用。圖5為3D SLAM技術在建筑工程項目中的BIM應用示例。
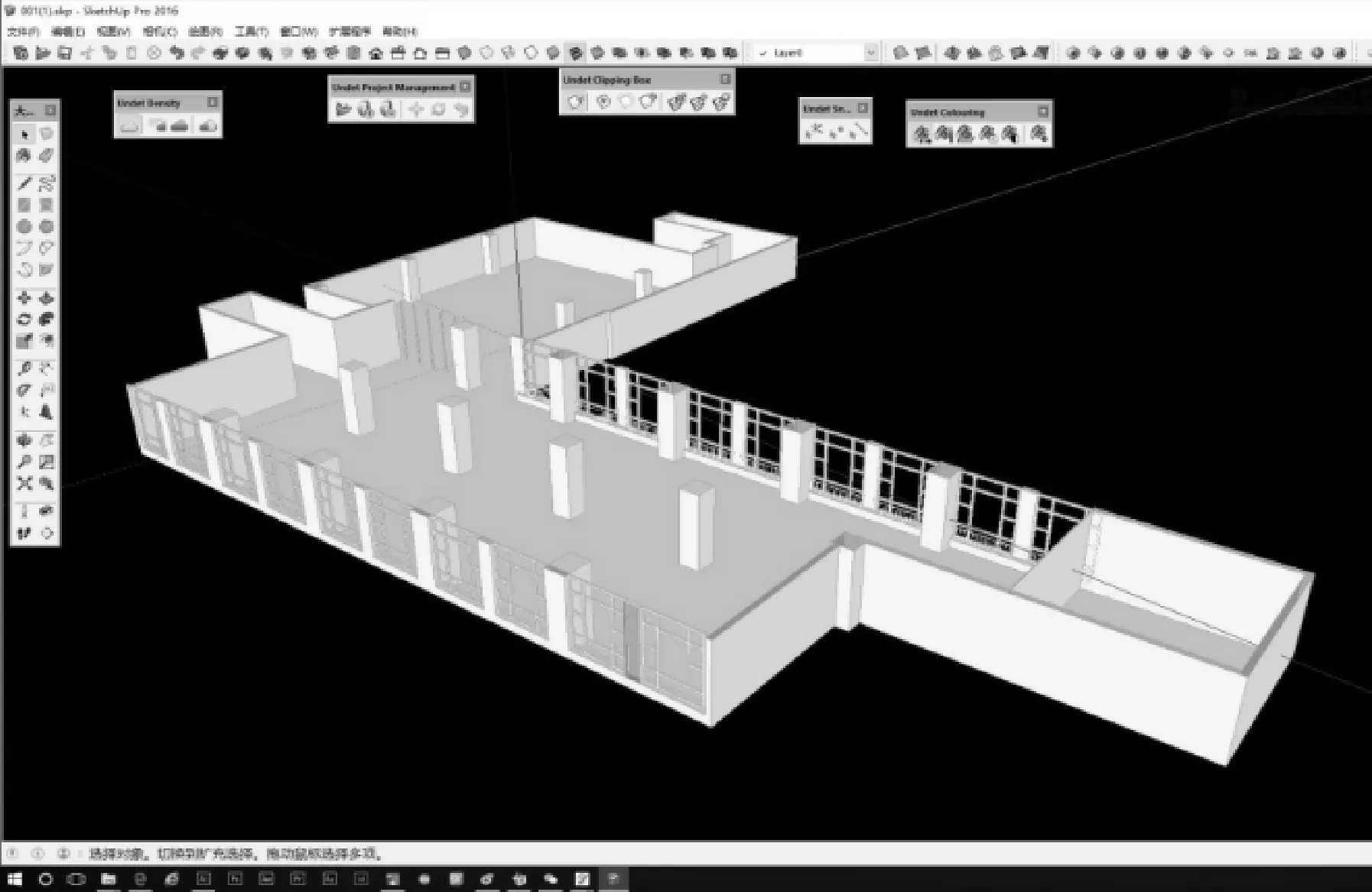
圖5 3D SLAM技術在建筑工程項目中的BIM應用
3.2.4電力、通信及森林管理
電力鐵塔和通信鐵塔是非常通用的長距離傳輸線纜的中繼支撐平臺。這些鐵塔的選址復雜性較高,在市區、山區、農田、戈壁等不同地形地貌情況下,施工和使用單位都需要對它們進行巡查和監管。除了常見的人工巡檢外,近來采用無人機結合激光和影像等自動化的巡查方法也逐漸成熟。與此同時,作為多地貌多地形的應用,地面激光和影像相結合的巡檢方式也被廣泛使用。這種地面數據采集方式可以更近距離、更精確地得到現場結構數據,對需要精確數據模型的管理和巡查類應用更為適用。當然,傳統的基于固定式三維激光掃描儀的作業模式效率非常低,參與的作業人員較多;在保證精度的情況下,采用3D SLAM激光影像背包測繪機器人移動作業可以提高工作效率10倍以上,并只需一名作業人員,因此可以極大地縮短外業施工周期,提升整體項目收益。
圖6為北京某高壓傳輸線路中繼支撐鐵塔站址,占地面積約44畝(30 000 m2),共有鐵塔4座,高度約55 m,為內業處理建模后的數據成果。
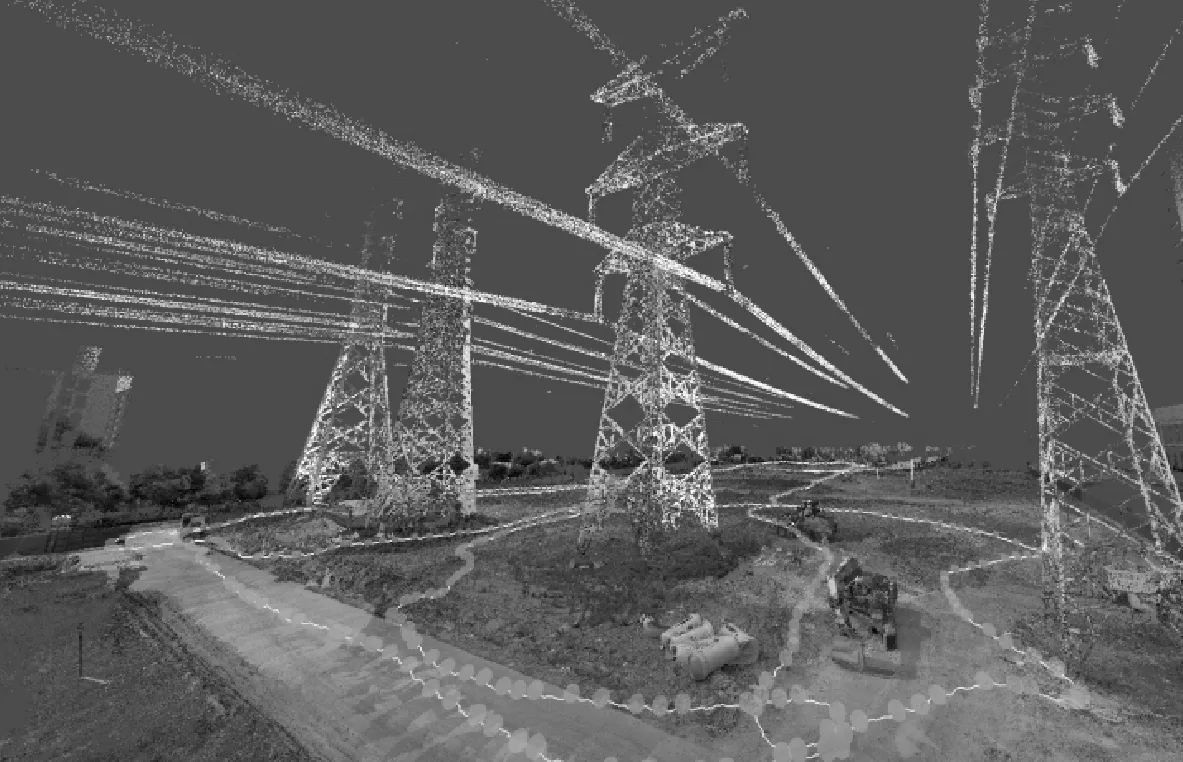
圖6 電力和通信鐵塔巡檢與管理中的應用實例
4 結 語
通過近些年的發展,移動機器人SLAM導航技術取得了很大的發展,多傳感器融合能進一步提高機器人的定位精度,尤其在一些復雜的場景中表現得更加突出,使得提高SLAM測繪移動機器人的測量精度、獲取高精度的點云數據成為可能。雖然目前的SLAM技術在測繪領域中的應用尚處于適應性試驗階段,但其特有的高精度、高效率及革新性在不遠的將來會帶來測繪領域的變革。
參考文獻:
[1] 王之卓.當代測繪科學的發展[J].測繪學報,1998,27(4):283-286.
[2] 趙吉先,聶運菊.測繪儀器發展的回顧與展望[J].測繪通報,2008(2):70-71.
[3] 寧津生,陳俊勇,李德仁,等.測繪學概論[M].武漢:武漢大學出版社,2004.
[4] 陳衛東,張飛.移動機器人的同步自定位與地圖創建研究進展[J].控制理論與應用,2005,22(3):455-460.
[6] SE S,LOWE D G,LITTLE J J.Mobile Robot Localization and Mapping with Uncertainty Using Scale-Invariant Visual Landmarks[J].International Journal of Robotics Research,2002,21(8):735-760.
[7] DAVISON A J.Real-time Simultaneous Localisation and Mapping with a Single Camera[C]∥IEEE International Conference on Computer Vision.[S.l.]:IEEE,2003.
[8] GRISETTI G,TIPALDI G D,STACHNISS C,et al.Fast and Accurate SLAM with Rao-Blackwellized Particle Filters[J].Robotics & Autonomous Systems,2007,55(1):30-38.
[9] SIM R,ELINAS P,LITTLE J J.A Study of the Rao-Blackwellised Particle Filter for Efficient and Accurate Vision-Based SLAM[J].International Journal of Computer Vision,2007,74(3):303-318.
[10]MONTEMERLO M,THRUN S,KOLLER D,et al.FastSLAM:a Factored Solution to the Simultaneous Localization and Mapping Problem in Robotics[C]∥Eighteenth National Conference on Artificial Intelligence.Edmonton:[s.n.],2002.
[11]WATER S T.American Association for Artificial Intelligence[J].Library Hi Tech News,1988(54):1-3.
[12]KAMEDA Y.Parallel Tracking and Mapping for Small AR Workspaces (PTAM) Augmented Reality[J].Journal of the Institute of Image Information & Television Engineers,2012,66(1):45-51.
[13]KONOLIGE K,AGRAWAL M.Frame SLAM:From Bundle Adjustment to Real-Time Visual Mapping[J].IEEE Transactions on Robotics,2008,24(5):1066-1077.
[14]KOHLBRECHER S,MEYER J,GRABER T,et al.Hector SLAM for Robust Mapping in USAR Environments[J].Robot Soccer World Cup,2013,8371:624-631.
[15]MUR-ARTAL R,MONTIEL J M M,TARDS J D.Orb-slam:A Versatile and Accurate Monocular Slam System[J].IEEE Transactions on Robotics,2015,31(5):1147-1163.
[16]ENGEL J,SCH?PS T,CREMERS D.LSD-SLAM:Large-Scale Direct Monocular SLAM[C]∥European Conference on Computer Vision.[S.l.]:Springer,2014:834-849.
[17]FORSTER C,PIZZOLI M,SCARAMUZZA D.SVO:Fast Semi-direct Monocular Visual Odometry[C]∥IEEE International Conference on Robotics and Automation.[S.l.]:IEEE,2014:15-22.
[18]ENDRES F,HESS J,STURM J,et al.3-D Mapping with an RGB-D Camera[J].IEEE Transactions on Robotics,2014,30(1):177-187.
[19]NEWCOMBE R A,LOVEGROVE S J,DAVISON A J.DTAM:Dense Tracking and Mapping in Real-time[C]∥2011 International Conference on Computer Vision.[S.l.]:IEEE,2011:2320-2327.
[20]ENDRES F,HESS J,STURM J,et al.3-D Mapping with an RGB-D Camera[J].IEEE Transactions on Robotics,2014,30(1):177-187.
[21]BAILEY T,DURRANT-WHYTE H.Simultaneous Localization and Mapping (SLAM):Part Ⅱ[J].IEEE Robotics & Automation Magazine,2006,13(3):108-117.
[22]KLEIN G,MURRAY D.Parallel Tracking and Mapping for Small AR Workspaces[C]∥Mixed and Augmented Reality,2007.ISMAR 2007.6th IEEE and ACM International Symposium on.[S.l.]:IEEE,2007:225-234.
[23]DAVISON A J,REID I D,MOLTON N D,et al.MonoSLAM:Real-time Single Camera SLAM[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2007,29(6):1052-1067.
[24]ANGELI A,FILLIAT D,DONCIEUX S,et al.Fast and Incremental Method for Loop-closure Detection using Bags of Visual Words[J].IEEE Transactions on Robotics,2008,24(5):1027-1037.
[25]HO K L,NEWMAN P.Loop Closure Detection in SLAM by Combining Visual and Spatial Appearance[J].Robotics & Autonomous Systems,2006,54(9):740-749.
[26]DURRANT-WHYTE H,BAILEY T.Simultaneous Localization and Mapping:Part I[J].IEEE Robotics & Automation Magazine,2006,13(2):99-110.
[27]KüMMERLE R,GRISETTI G,STRASDAT H,et al.g2o:A General Framework for Graph Optimization[C]∥Robotics and Automation (ICRA),2011 IEEE International Conference on.[S.l.]:IEEE,2011:3607-3613.
[28]徐冬云.基于Kinect的視覺同步定位與建圖研究[D].哈爾濱:哈爾濱工業大學,2016.
[29]GARCIA-FIDALGO E,ORTIZ A.Vision-based Topological Mapping and Localization Methods:A Survey[J].Robotics and Autonomous Systems,2015,64:1-2.
[30]黃鶴,王柳,姜斌,等.3D SLAM激光影像背包測繪機器人精度驗證[J].測繪通報,2016(12):68-73.
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
