導航衛星天線相位中心誤差標定方法研究現狀及發展趨勢
2018-04-08 01:45:42劉偉平郝金明
測繪通報 2018年3期
劉偉平,郝金明,鄧 科
(1. 地理信息工程國家重點實驗室,陜西 西安 710054; 2. 信息工程大學,河南 鄭州 450001)
天線相位中心誤差是衛星導航數據處理中一項重要的誤差源,通常分為相位中心偏差(phase center offset,PCO)和相位中心變化(phase center variation,PCV)。按照天線的不同,又可細分為接收機天線相位中心誤差和衛星天線相位中心誤差[1]。為了更好地改正天線相位中心誤差,通常需要借助一定的技術手段對其進行精確標定。關于接收機天線相位中心誤差的標定方法,國內外已有多篇文獻對其進行了深入研究和系統總結,而導航衛星天線相位中心誤差標定方法研究現狀的系統梳理工作目前國內還鮮有文獻論及。
隨著我國北斗系統的建設發展,精確標定北斗衛星的天線相位中心誤差既有必要也有需求。系統總結已有的標定方法,可為我國北斗衛星天線相位中心誤差標定方法的研究提供必要的參考和借鑒。為此,本文首先簡要介紹主要衛星導航系統的衛星天線情況,而后論述導航衛星天線相位中心誤差標定方法的發展歷程及研究現狀,最后給出標定方法的發展趨勢。
1 導航衛星天線簡介
1.1 GPS衛星
截至目前,GPS衛星共有6種型號,包括Block Ⅰ、Block Ⅱ、Block ⅡA、Block ⅡR/ⅡR-M、Block ⅡF、Block Ⅲ[2]。其中,Block Ⅰ、Block Ⅱ、Block ⅡA衛星已經全部退役,Block Ⅲ衛星正在生產,截至2017年1月1日,在軌服役的衛星包括12顆Block ⅡR衛星、7顆Block ⅡR-M衛星和12顆Block ⅡF衛星。
GPS衛星天線由分布于兩個同心圓的12個螺旋形單元構成,這種結構決定了其發射的信號不會是完美的半球信號波,其相位中心必定與發射信號的方位角和天底角有關[3-4]。圖1給出了一顆Block Ⅱ衛星天線的結構示意圖,其他衛星類似。
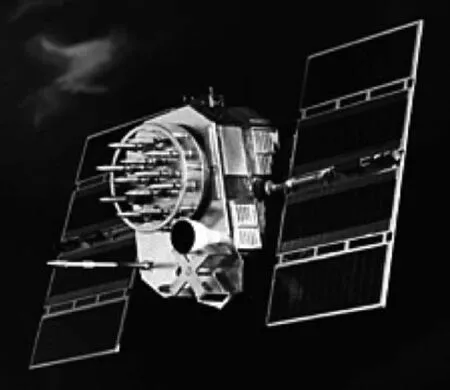
圖1 Block Ⅱ衛星天線結構示意圖
處理中,相同型號衛星的天線通常可作為同一類型。但值得注意的是,Block ⅡA衛星和Block Ⅱ衛星安裝了同一類型的天線,此外,最后發射的4顆Block ⅡR衛星安裝了為Block ⅡR-M設計的天線,因此處理中需將Block ⅡR衛星分成Block ⅡR-A和Block ⅡR-B衛星,并將Block ⅡR-B衛星和Block ⅡR-M衛星作為同一類型。
1.2 GLONASS衛星
GLONASS衛星前后共發射了3種類型的衛星:GLONASS衛星、GLONASS-M衛星和GLONASS-K衛星。目前,GLONASS衛星已經退役,GLONASS-M衛星為主要工作衛星,2011年發射了第一顆GLONASS-K衛星,后續將陸續發射新一代GLONASS-K2衛星。截至2017年1月1日,GLONASS系統在軌衛星共27顆,其中24顆處于工作狀態,1顆備份,1顆在軌測試,1顆處于維修狀態。
GLONASS衛星天線由12個信號元器件組成,GLONASS-K衛星和GLONASS-M衛星保持了相同的特性[5-6]。12個信號元器件是螺旋形的天線饋源,在朝向地球的天線面板上以2個同心圓進行分布,外圓有8個天線單元,內圓有4個,圖2給出了一顆GLONASS-K衛星天線的示意圖。

圖2 GLONASS-K衛星天線結構示意圖
這些衛星均安裝了姿態控制系統以維持天線陣列持續指向地心,其誤差不超過±1°。發射的信號是右旋橢圓極化信號,兩個頻率帶寬上的信號在天線瞄準線±19°范圍內,其強度不會弱于0.7 dB[7]。天線陣列的設計是為了以幾乎相同的信號強度覆蓋與衛星正對的地球半球,這種形狀的天線發射類型可以彌補信號從天底方向到地球邊緣的徑向衰減。
1.3 Galileo衛星
Galileo系統正處于建設階段,設計有3個MEO軌道面,傾角56°,半長軸29 600 km,衛星使用與其他GNSS相同的右旋橢圓極化天線。2016年12月15日,Galileo在軌衛星達到18顆,系統宣布開始提供初始服務。截至2017年1月1日,Galileo共發射3種類型衛星:GIOVE衛星、IOV衛星和FOC衛星。GIOVE衛星為試驗衛星,包含A、B兩星,已于2012年退役;IOV衛星為初始驗證衛星,包含4顆衛星;FOC衛星為工作衛星,預計發射30顆左右。
IOV衛星由Airbus Defence and Space公司生產,如圖3所示。IOV衛星包含45個排列在一起的天線單元,以每6個或9個組成一個子陣列,整個天線直徑達到1.4 m。這種天線為GIOVE-B天線的升級,GIOVE-B天線包含42個天線單元[8]。

圖3 Galileo IOV衛星天線結構示意圖
FOC衛星由OHB System AG公司生產,如圖4所示。2014年8月,發射了第一對衛星GAL-201和GAL-202。由于發射異常,這兩顆衛星由半長軸為29 600 km的近圓軌道變成了偏心率為0.23、半長軸為26 200 km的橢圓軌道。經過2014年底對GAL-201和2015年初對GAL-202的軌道機動,兩顆衛星的軌道均在一定程度上得到了調整,但仍然與原設計存在偏差,從而產生了一種新的軌道類型:偏心率0.16,半長軸27 980 km,地面重復軌跡周期20 d。兩顆衛星分別于2014年12月和2015年3月開始發射信號。2015年3月,發射了GAL-203和GAL-204,并于2015年5月開始發射信號,但2015年夏有3顆FOC衛星發生了信號中斷。其后,雙星或四星發射持續進行,于2016年12月建成了18顆衛星構成的星座,開始提供初始服務,系統最終將建成24顆工作衛星和6顆備份衛星的星座。FOC衛星天線與GIOVE-A衛星類似,由分布于4個象限的28個天線單元組成的天線陣列構成[9]。
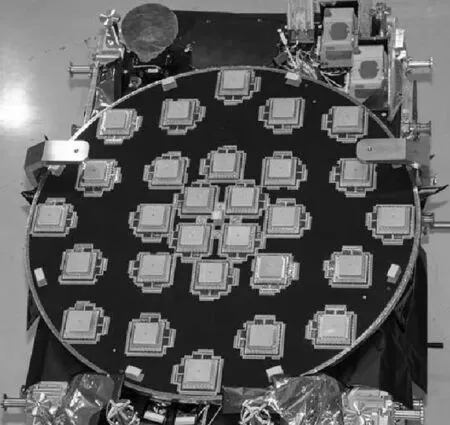
圖4 GALILEO FOC衛星天線結構示意圖
1.4 BDS衛星
北斗系統包含3類衛星:MEO衛星、IGSO衛星和GEO衛星[10]。2012年底,建成由5顆GEO衛星、5顆IGSO衛星和4顆MEO衛星構成的區域系統,開始提供亞太導航服務[11]。2015年起陸續發射全球系統衛星,截至2017年1月1日,已經在區域系統的基礎上又發射了3顆IGSO、3顆MEO和1顆 GEO衛星。
北斗系統的衛星天線相位中心改正主要有3種策略[12]:第一種是國際多模GNSS實驗工程(MGEX)采用的方法,即只改正天線相位中心偏差(x=0.6 m,y=0.0 m,z=1.1 m),忽略PCV改正。第二種是硬件制造商公布的策略,也僅改正天線相位中心偏差(x=0.634 m,y=-0.003 m,z=1.075 m),同樣忽略PCV改正值[13]。第三種是歐空局ESA/ESOC解算得到的改正模型[14],表1和表2分別給出了5顆IGSO衛星和4顆MEO衛星的PCO改正模型和PCV改正模型。

表1 北斗衛星PCO改正模型 mm

表2 北斗衛星PCV改正模型 mm
2 標定方法研究現狀
2.1 國外研究現狀
隨著GPS的建成運行,人們逐漸發現其不但可以應用在低精度的導航領域,而且能夠利用載波相位測量完成高精度的測繪任務。20世紀80年代中期,Sims等首次提出在利用GPS接收機進行高精度測量時需要進行接收機天線相位中心誤差改正[15],隨后Geiger提出把相位中心改正分為PCO和PCV兩部分進行考慮[16]。20世紀90年代初,Schupler等首先提出在微波暗室中估計絕對天線相位中心改正的方法[17],然而,該方法需要復雜的儀器設備且費用昂貴,最主要的問題是利用該方法獲得的相位中心改正數會在全球解中引入15×10-9的尺度誤差[18-19],因此,該方法最初并未得到推廣應用。
1996年6月30日起,IGS在GPS數據分析中開始使用相對天線相位改正模型。其標定方法為:通過短基線相對觀測,計算待標定天線相對參考天線(通常選擇AOAD/M-T天線)的PCO和PCV,并假設參考天線的PCV為0[20-21]。然而參考天線本身的PCV并不為0,因此這種處理模式會在解算結果中引入系統誤差[22]。
為此,研究人員又將注意力轉移到絕對天線相位中心標定方法的研究上。20世紀90年代末,德國漢諾威大學和Geo++公司提出了一種新的絕對天線相位中心標定方法——機器人標定法[23-24]。隨后,有研究表明:機器人標定法與微波暗室標定結果具有很好的一致性,但是全球解中的尺度誤差問題仍然存在[25]。兩種獨立方法獲得一致結果在一定程度上打消了人們對絕對天線相位中心標定方法本身的懷疑,研究人員轉而開始分析尺度誤差產生的其他可能原因。
隨后,有研究指出產生以上現象的原因是因為僅考慮了接收機絕對天線相位中心誤差,而對衛星的天線相位中心誤差處理不當[26]。在此之前,關于衛星天線相位中心所知甚少,系統僅對每一類型的衛星采用了一組天線相位中心偏差值,忽略了天線相位中心變化,而這些偏差值后來被證明精度較低[27-28],而且沒有明確說明對應的是L1、L2還是LC的相位中心。
為此,Rothacher等指出可以借助VIBI技術或者利用發射前精密的地面標定予以解決[25]。然而,后續的試驗卻證明這2條技術途徑都是行不通的。Mader等利用一個真實的Block ⅡA衛星天線,在地面上將其作為接收天線進行標定,結果并未獲得令人滿意的精度[29]。此外,IGS、IVS(international VLBI service)和ILRS(international laser ranging service)開展聯合研究,意圖利用VLBI技術來標定衛星天線相位中心,結果表明也難以達到精度水平要求[3]。
最終,研究人員認為衛星天線相位中心參數應當與其他大地參數一起在GPS全球解中進行估計,問題在于衛星天線相位中心參數與測站高程、對流層參數以及接收機的PCO和PCV參數之間存在強相關性[19]。Zhu等深入分析了這種相關性[28];Schmid等首次證明可首先采用ITRF2000尺度因子和機器人標定的接收機天線相位中心,而后估計與天底角相關的衛星天線PCV[3]。此外,與方位角相關的PCV也被證明是存在的[30]。由于處理中采用LC組合來消除電離層,這些PCV估值是針對LC觀測量的。以上工作按不同衛星類型估計PCV,Ge等指出由于不同衛星的PCV估值差別明顯,特別是z軸方向,使用按不同衛星類型給定的PCV仍是不夠的,應當按衛星給定PCV[31],但是,這種處理模式會使待估參數急劇增多,影響計算效率。
2004年,IGS提出要生成一組一致的絕對天線相位中心改正值用以在不同分析中心進行測試,TUM和GFZ決定重新處理自1994年起的IGS觀測數據,并將來自不同處理軟件使用不同處理策略的兩組結果進行合成處理,2006年11月5日,IGS開始使用絕對天線相位中心改正模型——igs05.atx,將相對天線相位中心模型改為絕對的優點在于:①與高度角相關的影響將得到改善,GPS定位結果將降低對高度截止角的依賴[30]。②相關參數的估值精度將得到改善,例如,有研究表明:采用絕對天線相位中心誤差模型后,由GPS和VLBI獲得的對流層天頂延遲差異會減小[30],全球參考框架尺度因子將更加穩定[32]。
igs05.atx得到了廣泛應用,但是,隨著時間的推移,其本身存在的缺陷逐漸暴露[1],此外,隨著新發射的衛星,以及不斷改進的多系統地面觀測網、由機器人標定的接收機天線也不斷增多,更新該模型的必要性日益突出。特別的,2010年5月,新的坐標框架ITRF2008開始使用[33],ITRF2008的尺度由VLBI和SLR 2種技術共同決定,而ITRF2005的尺度僅由VLBI決定[34],兩種尺度存在-0.94×10-9的差異,這種尺度差異會在衛星天線相位z-offset中引入+12.1 cm的誤差[28]。由于z-offset與尺度的強相關,如果繼續使用igs05.atx中的z-offset,將會導致IGS的尺度與ITRF產生差異。為此,經過對IGS歷史數據的再次處理,2011年4月17日起,所有IGS分析中心開始采用新的絕對天線相位中心模型——igs08.atx[35]。
除GPS外,GLONASS在1998年IGS組織的數據會戰之后,軌道精度得到不斷改善,其衛星天線相位中心誤差也引起了相關研究人員的注意。在2006年IGS開始采用絕對天線相位中心誤差之前,GLONASS衛星與GPS衛星類似,也是僅使用了按衛星類型給定的相位中心偏差PCO[36]。而后,CODE重新處理了2005年到2006年15個月的多系統數據,從而為13顆GLONASS衛星和4顆GLONASS-M衛星提供了天線相位中心誤差改正值[6]。需要指出的是:這次計算采用的觀測數據是由一個主要分布于歐洲的稀疏的觀測網絡提供,并且其中2顆GLONASS-M衛星SVN713和SVN714僅采用了3個月的觀測數據。GLONASS衛星天線相位中心變化被建模為分段線性函數,為了避免模型參數過多,僅為所有衛星共同估計了一組與天底角相關的PCV,然后,固定PCV,為每顆衛星估計z-offset,而PCO的水平分量固定為衛星制造商的提供值。
2011年4月,隨著IGS開始采用新的絕對天線相位中心模型——igs08.atx,GLONASS衛星天線相位中心誤差標定值也進行了相應的更新,相比igs05.atx,GLONASS的工作衛星、地面觀測網都得到了很大改進,接收機天線的標定也有利于多系統解的一致性[37]。此外,提供標定值的分析中心由原來的1家增加為2家,觀測數據時間區間由原來的15個月增加為7.5年。
由于其他衛星導航系統(如BDS、Galileo等)正處于建設階段,衛星天線相位中心誤差的研究還未如GPS和GLONASS一樣完善,但是,近期也有一些代表研究成果發表。對于Galileo,無論IOV衛星還是FOC衛星,天線相位中心誤差發射前的地面標定值均未公開發表,因此,對于IOV衛星,IGS(MGEX)是基于衛星圖片采用了一個約定值,并在數據分析中附加尺度模型[38];對于FOC衛星,則是基于幾周數據估計的近似值[39]。2016年,Steigenberger等對Galileo衛星的PCO標定方法作了進一步研究[9],但是忽略了衛星的PCV,有研究表明:IOV衛星的PCV峰值在10~15 mm左右,其標定方法仍需引起注意。對于北斗衛星,之前主要采用經驗值或出廠標定值,2014年,歐空局ESA/ESOC研究了北斗衛星天線相位中心誤差的標定方法,并發布了MEO和IGSO衛星的PCO和PCV值[14]。
2.2 國內研究現狀
在天線相位中心誤差標定方法研究方面,前期由于國內主要是應用GPS等系統進行測量定位,因此主要集中在接收機天線相位中心誤差的處理上,部分研究分析了該誤差對定位定軌的影響,而對衛星天線相位中心誤差的標定方法研究得還不多。
在接收機天線PCO標定方法的研究方面,1994年,武漢大學蔡宏翔介紹了微波暗室標定方法的基本原理[40];1995年,同濟大學沈文炳對野外短基線標定方法進行了改進[41];2000年,陳逸群利用幾何關系和最小二乘法計算了天線相位中心偏差[42];2001年,陜西天文臺高玉平對多種類型GPS接收機天線的相位中心偏差進行了檢測,并給出了檢測結果及建議[43];2009年,中南大學陳桂珍總結比較了國內外天線相位中心偏差檢測的特點及數據處理方法,并設計和實現了GPS接收機天線自動檢測系統[44];2013年,解放軍61365部隊張則宇等比較了3種GPS天線相位中心偏差校準的方法[45]。
近年來,在接收機天線PCV標定方法的研究方面,國內學者也逐漸發表了部分代表性成果。2010年,信息工程大學張成軍分析了基于測量機器人的天線相位中心偏差和變化的標定方法[46];2013年,武漢大學胡志剛、郭強等利用首臺國產室外自動機器人檢測設備進行了接收機天線相位中心誤差室外絕對標定實驗[47-48];2013、2014年,中國地震局李曉波、長安大學馬德強分別對GNSS天線相位中心偏差與變化精確標定方法進行了系統研究[49-50];2017年,信息工程大學鄧科系統研究了接收機天線相位中心誤差的相對和絕對標定方法,并對北斗接收機天線相位中心偏差和變化的標定方法進行了深入探討[51]。
在研究接收機天線相位中心誤差標定方法的同時,相關人員還研究了其對定位定軌的影響。2007年,北京大學高偉等分析了接收機天線PCO對GPS高程的影響[52];同年,武漢大學郭際明分析了天線相位中心偏差和變化對高精度GPS數據處理的影響[53];2010年,武漢大學張小紅、長安大學涂銳對天線相位中心誤差及改正模型對精密單點定位精度的影響進行了研究與分析[54-55];此外,武漢大學胡志剛、信息工程大學田英國還分析了接收機天線相位中心誤差對低軌衛星星載GNSS精密軌道確定的影響[56-57]。
目前,我國北斗衛星的天線相位中心誤差改正數還主要應用的是地面上的出廠標定值,該標定值只包含PCO,而沒有PCV,并且所有類型衛星均使用了同一PCO值。直到2014年,歐空局ESA/ESOC的Dilssner等才對北斗衛星天線相位中心PCO和PCV的標定方法作了初步研究,且僅公布了MEO和IGSO衛星的天線相位中心誤差標定值[14],黃觀文等分析對比了這些標定值的應用效果[12]。為了推動北斗系統在高精度領域的推廣應用,有必要進一步加強衛星天線相位中心誤差標定方法的研究。
3 未來發展趨勢
經過多年研究,導航衛星天線相位中心誤差標定方法得到了長足發展,但還存在如下問題有待進一步研究:
3.1 多系統及新型衛星的天線相位中心誤差標定方法研究
目前,IGS發布的衛星天線相位中心模型主要考慮了GPS衛星和GLONASS衛星,隨著Galileo、BDS等系統的建設發展,其衛星天線相位中心誤差的標定方法也引起了研究人員的關注,并取得了部分成果。事實上,在IGS召開的2014年研討會上,已經提議在其發布的天線相位中心誤差模型中將新建設的衛星導航系統考慮在內,并于2015年7月起,開始考慮在igs08.atx中增加Galileo、BDS及SBAS(如QZSS)的衛星天線相位中心誤差標定值。如何對這些衛星的天線相位中心誤差進行更精確的標定,是否可以照搬GPS或GLONASS的模型及標定方法,需要結合更多實測數據作深入研究和分析。此外,GPS和GLONASS系統近期也會有新型衛星發射,對于這些新型衛星的天線相位中心誤差標定方法也需要作進一步的研究。
3.2 建立新的衛星天線相位中心變化模型
目前,對于導航衛星天線相位中心變化,主要是按照衛星類型進行分類,而后利用與觀測方向高度角、方位角相關的分段線性函數或球諧函數進行建模。這種建模方式是否對所有衛星都適用,有沒有更優的建模方式,有待進一步討論。
3.3 更精細的接收機天線相位中心誤差標定
標定衛星天線相位中心誤差時,需要已知接收機天線相位中心誤差,因此更加精細的接收機天線相位中心誤差標定方法對衛星天線的標定具有重要影響。
在采用接收機絕對天線相位中心改正的同時,IGS開始考慮整流罩的影響。雖然整流罩對天線相位中心的影響在厘米量級[58],但是,直到igs05.atx應用之前,該影響或多或少是被忽略的。特別的,忽略整流罩將對不同技術(如SLR、VLBI等)解算的基線結果產生顯著影響[59-60],從而影響不同空間技術的聯合應用。目前,由于部分天線和整流罩的標定值遺失或根本沒有標定,這個問題暫時還未得到完全解決,需要進一步考慮整流罩對接收機天線相位中心的影響。
3.4 低軌衛星星載觀測數據輔助導航衛星天線相位中心誤差標定方法研究
以上論述的標定方法均是基于地面觀測量進行的,由于天線相位中心計算時需要固定尺度基準,造成GNSS技術無法與VLBI和SLR相獨立。有研究表明:利用低軌衛星星載數據標定導航衛星天線相位中心是可行的,除了可以獲得大天底角對應的改正數,還能不固定參考框架尺度而獲得標定值,這樣就可以依靠GNSS獲得獨立的框架尺度[61]。此時,需要使用低軌衛星星載天線的地面標定值,至少低軌衛星衛星天線的徑向PCO標定值無法與導航衛星發射天線的PCO獨立。
4 結 語
導航衛星天線相位中心誤差的精確標定是進行精密定位、開展高精度位置服務的前提,對衛星導航系統在高精度應用領域的拓展具有重要作用。目前,在相關研究人員的持續努力下,GPS、GLONASS等衛星天線相位中心誤差標定已由相對標定轉換為絕對標定,且不斷更新模型,朝著更高精度、更加細化的方向發展。隨著我國北斗全球系統的建成組網,需要進一步加強衛星天線相位中心誤差標定方法的研究,為北斗系統的全球高精度應用提供基礎支撐。
參考文獻:
[1] SCHMID R,STEIGENBERGER P,GENDT G,et al.Generation of a Consistent Absolute Phase-center Correction Model for GPS Receiver and Satellite Antennas[J].Journal of Geodesy,2007,81(12):781-798.
[2] 劉偉平,郝金明.國外衛星導航系統精密定軌技術的研究現狀及發展趨勢[J].測繪通報,2016(3):1-6.
[3] SCHMID R,ROTHACHER M.Estimation of Elevation-dependent Satellite Antenna Phase Center Variations of GPS Satellites[J].Journal of Geodesy,2003,77(7-8):440-446.
[4] CZOPEK F M,SHOLLENBERGER S.Description and Performance of the GPS Block I and Ⅱ L-Band Antenna and Link Budget[C]∥Proceedings of ION-GPS93.Salt Lake City:The Institute of Navigation,1993:37-43.
[5] JOHNSON N L.GLONASS Spacecraft[J].GPS World,1994,5(11):51-58.
[6] DILSSNER F,SPRINGER T,FLOHRER C,et al.Estimation of Phase Center Corrections for GLONASS-M Satellite Antennas[J].Journal of Geodesy,2010,84(8):467-480.
[7] ICD.GLONASS Interface Control Document Version 5.1[R].Moscow:Russian Institute of Space Device Engineering,2008.
[8] STEIGENBERGER P,DACH R,PRANGE L,et al.Galileo Satellite Antenna Modeling[C]∥EGU General Assembly 2015.Vienna:EGU,2015.
[9] STEIGENBERGER P,FRITSCHE M,DACH R,et al.Estimation of Satellite Antenna Phase Center Offsets for Galileo[J].Journal of Geodesy,2016,90(8):773-785.
[10]劉偉平.北斗衛星導航系統精密軌道確定方法研究[D].鄭州:信息工程大學,2014:2-10.
[11]郝金明,劉偉平,楊力,等.北斗衛星導航系統精密定軌技術研究現狀[J].測繪科學技術學報,2015,32(3):221-225,230.
[12]黃觀文,張睿,張勤,等.BDS衛星天線相位中心改正模型比較[J].大地測量與地球動力學,2015,35(4):658-661.
[13]LOU Y,LIU Y,SHI C,et al.Precise Orbit Determination of Beidou Constellation Based on BETS and MGEX Network[J].Scientific Reports,2014,4(8):4692.
[14]DILSSNER F,SPRINGER T,SCH?NEMANN E,et al.Estimation of Satellite Antenna Phase Center Corrections for Beidou[R].Pasadena,California:IGS Workshop,2014.
[15]SIMS M L.Phase Center Variation in the Geodetic TI4100 GPS Receiver System’s Conical Spiral Antenna[C]∥Proceedings of the First International Symposium on Precise Positioning with the Global Positioning System.Rockville,Maryland:U.S.Department of Commerce,1985.
[16]GEIGER A.Modeling of Phase Center Variation and Its Influence on GPS-positioning[C]∥Proceedings of the International GPS-Workshop Darmstadt:GPS-Techniques Applied to Geodesy and Surveying.Darmstadt,Germany:Springer,1988:210-222.
[17]SCHUPLER B R,ALLSHOUSE R L,CLARK T A.Signal Characteristics of GPS User Antennas[J].Navigation,1994,41(3):277-295.
[18]ROTHACHER M,SCHAER S,MERVART L,et al.Determination of Antenna Phase Center Variations Using GPS Data[C]∥IGS Workshop Proceedings on Special Topics and New Directions.Potsdam:GeoForschungs Zentrum Potsdam,1995:205-220.
[19]SPRINGER T A.Common Interests of the IGS and the IVS[C]∥Proceedings of International VLBI Service for Geodesy and Astrometry 2000 General Meeting.Germany:ADS,2000:296-305.
[20]MADER G L.GPS Antenna Calibration at the National Geodetic Survey[J].GPS Solutions,1999,3(1):50-58.
[21]ROTHACHER M,GURTNER W,SCHAER S,et al.Azimuth-and Elevation-dependent Phase Center Corrections for Geodetic GPS Antennas Estimated from GPS Calibration Campaigns[C]∥Proceedings of Symposium No.115 GPS Trends in Precise Terrestrial,Airborne,and Spaceborne Applications.Boulder,CO,USA:Springer,1995:333-338.
[22]SCHMID R,MADER G,HERRING T.From Relative to Absolute Antenna Phase Center Corrections[C]∥Proceedings of 2004 IGS Workshop and Symposium.Bern:Astronomical Institute,University of Bern,2005:209-219.
[23]MENGE F,SEEBER G,V?ELKSEN C,et al.Results of Absolute Field Calibration of GPS Antenna PCV[C]∥Proceedings of the 11th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION-GPS98).Nashville,TN:ION,1998:31-38.
[24]WüBBENA G,SCHMITZ M,MENGE F,et al.Automated Absolute Field Calibration of GPS Antennas in Real-time[C]∥Proceedings of the 13th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2000).Salt Lake City,UT:ION,2000:2512-2522.
[25]ROTHACHER M.Comparison of Absolute and Relative Antenna Phase Center Variations[J].GPS Solutions,2001,4(4):55-60.
[26]SPRINGER T A.Modeling and Validating Orbits and Clocks Using the Global Positioning System[D].Switzerland:University of Bern,2000.
[27]ROTHACHER M.Advanced Techniques of GPS Data Processing at the AIUB in Berne[R].Udine:International Centre for Mechanical Sciences,1994:137-153.
[28]ZHU S Y,MASSMANN F H,YU Y,et al.Satellite Antenna Phase Center Offsets and Scale Errors in GPS Solutions[J].Journal of Geodesy,2003,76(11-12):668-672.
[29]MADER G L,CZOPEK F M.The Block ⅡA Satellite-calibrating Antenna Phase Centers[J].GPS World 2002,13(5):40-46.
[30]SCHMID R,ROTHACHER M,THALLER D,et al.Absolute Phase Center Corrections of Satellite and Receiver Antennas:Impact on Global GPS Solutions and Estimation of Azimuthal Phase Center Variations of the Satellite Antenna[J].GPS Solutions,2005,9(4):283-293.
[31]GE M,GENDT G.Estimation and Validation of the IGS Absolute Satellite Antenna Phase Center Variations[C]∥Proceedings of 2004 IGS Workshop and Symposium.Bern,Switzerland:[s.n.],2005:1-7.
[32]GE M,GENDT G,DICK G,et al.Impact of GPS Satellite Antenna Offsets on Scale Changes in Global Network Solutions[J].Geophysical Research Letters,2005,32(6):L06310.
[33]ALTAMIMI Z,COLLILIEUX X,MéTIVIER L.ITRF2008:an Improved Solution of the International Terrestrial Reference Frame[J].Journal of Geodesy,2011,85(8):457-473.
[34]ALTAMIMI Z,COLLILIEUX X,LEGRAND J,et al.ITRF2005:A New Release of the International Terrestrial Reference Frame Based on Time Series of Station Positions and Earth orientation parameters[J].Journal of Geophysical Research,112(B9):B09401.
[35]SCHMID R,DACH R,COLLILIEUX X,et al.Absolute IGS Antenna Phase Center Model igs08.atx:Status and Potential Improvements[J].Journal of Geodesy,2016,90(4):343-364.
[36]KOUBA J.A Simplified Yaw-attitude Model for Eclipsing GPS Satellites[J].GPS Solutions,2009,13(1):1-12.
[37]WüBBENA G,SCHMITZ M,BOETTCHER G,et al.Absolute GNSS Antenna Calibration with a Robot:Repeatability of Phase Variations,Calibration of GLONASS and Determination of Carrier-to-noise Pattern[C]∥Proceedings of IGS 2006 Workshop.Darmstadt,Germany:[s.n.],2006.
[38]RIZOS C,MONTENBRUCK O,WEBER G,et al.The IGS MGEX Experiment as a Milestone for a Comprehensive Multi-GNSS Service[C]∥Proceedings of the ION 2013 Pacific PNT Meeting.Honolulu,Hawaii:ION,2013:289-295.
[39]MONTENBRUCK O,SCHMID R,MERCIER F,et al.GNSS Satellite Geometry and Attitude Models[J].Advances in Space Research,2015,56(6):1015-1029.
[40]蔡宏翔,王昆杰.雙頻GPS接收機天線相位中心的測定[J].陜西天文臺臺刊,1994,17(2):25-32.
[41]沈文炳.GPS接收機天線相位中心偏差參數檢測方法的改進[J].測繪工程,1995,4(3):36-43.
[42]陳逸群,劉大杰.GPS接收機天線相位中心偏差的一種檢定與計算方法[J].測繪通報,2000(12):15-16.
[43]高玉平.GPS接收機天線相位中心偏差的檢測[J].陜西天文臺臺刊,2001,24(2):121-126.
[44]陳桂珍.GPS接收機天線相位中心偏差檢測技術研究[D].長沙:中南大學,2006:1-20.
[45]張則宇,劉智超,龐飛,等.三種GPS天線相位中心偏差校準方法比較[J].計測技術,2013,33(4):55-58.
[46]張成軍.基于測量機器人的GPS天線相位中心影響檢測法[J].測繪通報,2010(3):7-9.
[47]胡志剛.北斗衛星導航系統性能評估理論與試驗驗證[D].武漢:武漢大學,2013:130-134.
[48]郭強.GPS接收機天線相位中心絕對校正方法研究[D].武漢:武漢大學,2013:1-10.
[49]李曉波.GNSS天線相位中心改正模型的建立[D].北京:中國地震局地震預測研究所,2013:5-10.
[50]馬德強.GNSS接收機天線相位中心誤差改正方法研究[D].西安:長安大學,2014:1-6.
[51]鄧科.GNSS接收機天線相位中心誤差檢測方法研究[D].鄭州:信息工程大學,2017:1-15.
[52]高偉,晏磊,徐紹銓,等.GPS天線相位中心偏差對GPS高程的影響及改正研究[J].儀器儀表學報,2007,28(9):2052-2058.
[53]郭際明,史俊波,汪偉.天線相位中心偏移和變化對高精度GPS數據處理的影響[J].武漢大學學報(信息科學版),2007,32(12):1143-1146.
[54]張小紅,李盼,李星星,等.天線相位中心改正模型對PPP參數估計的影響[J].武漢大學學報(信息科學版),2011,36(12):1470-1473.
[55]涂銳,黃觀文,鄒順.天線相位中心偏差變化及改正模型對精密單點定位精度的影響[J].大地測量與地球動力學,2010,30(3):113-117.
[56]胡志剛,趙齊樂,郭靖,等.GPS天線相位中心校正對低軌衛星精密定軌的影響研究[J].測繪學報,2011,40(S0):34-38.
[57]田英國,郝金明.Swarm衛星天線相位中心校正及其對精密定軌的影響[J].測繪學報,2016,45(12):1406-1412.
[58]BRAUN J,STEPHENS B,RUUD O,et al.The Effect of Antenna Covers on GPS Baseline Solutions[R].UNAVCO Report.Boulder:University NAVSTAR Consortium,1997.
[59]RAY J,ALTAMIMI Z.Evaluation of Co-location Ties Relating the VLBI and GPS Reference Frames[J].Journal of Geodesy,2005,79(4-5):189-195.
[60]RAY J,CRUMP D,CHIN M.New Global Positioning System Reference Station in Brazil[J].GPS Solutions,2007,11(1):1-10.
[61]HAINES B J,BAR-SEVER Y E,BERTIGER W I,et al.Realizing a Terrestrial Reference Frame Using the Global Positioning System[J].Journal of Geophysical Research,2015,120(8):5911-5939.
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
科技傳播(2019年22期)2020-01-14 03:06:28
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
北京航空航天大學學報(2017年5期)2017-11-23 05:54:08
Coco薇(2016年2期)2016-03-22 02:42:52
衛星與網絡(2016年12期)2016-02-05 09:23:28
西部廣播電視(2015年7期)2016-01-16 03:45:17
Coco薇(2015年1期)2015-08-13 02:47:34
