一種起豎過程中捷聯(lián)慣導快速對準方法
2018-04-04 02:09:26劉百奇尹世明
兵器裝備工程學報 2018年3期
劉百奇,呂 艷,尹世明,楊 陽
(中國運載火箭技術研究院研究發(fā)展中心, 北京 100076)
慣導系統(tǒng)在正常進入導航之前必須進行初始對準,對準精度和對準時間是衡量整個系統(tǒng)工作性能的重要指標。當武器系統(tǒng)或運載系統(tǒng)需要應急發(fā)射時,如何提升初始對準精度和速度尤為重要[1]。
目前,捷聯(lián)慣導系統(tǒng)初始對準的方式主要有光學對準、傳遞對準和自對準。傳統(tǒng)光學對準方法雖然簡單、易實現(xiàn),但是對配套設備要求高,時間長、自動化程度低[2]。Fang[3]提出了利用水平失準角收斂快的特點,利用水平失準角的穩(wěn)態(tài)值直接估計方位失準角,但該方法并不適用于應急發(fā)射。Lü[4]提出了運用IIR濾波器和Kalman濾波器相結合,減弱噪聲和外部干擾,提高方位角的對準精度,但不能提高對準的快速性。Wu[5]提出了一種基于GPS輔助信息的捷聯(lián)慣導對準算法,但其姿態(tài)估計的精度與載車的機動模式有關。傳遞對準的方法也用于多種武器系統(tǒng),采用高精度的主慣導通過傳遞對準將信息傳遞給子慣導[6-7],但該方法對載體機動形式有一定要求。自對準不需要借助外界信息,通過慣導系統(tǒng)自身的輸出完成對準,但其方位角的對準時間長,難以滿足快速要求。
本文提出一種在武器或運載器起豎過程中進行捷聯(lián)慣導快速對準的方法,利用起豎過程形成的俯仰機動以及桿臂效應帶來的加速度變化,提高了方位失準角的可觀測度,并且運用動桿臂補償法自主獲取捷聯(lián)慣導的位置和速度量測信息,利用卡爾曼濾波實現(xiàn)快速對準,與傳統(tǒng)的起豎之后進行靜基座精對準方法[8]相比,有效提升了應急發(fā)射時對準的快速性和精度。
1 起豎過程快速對準建模
1.1 捷聯(lián)慣導系統(tǒng)誤差建模
捷聯(lián)慣導系統(tǒng)的誤差源有很多種,其中主要有慣性器件本身誤差、慣性器件量化誤差、系統(tǒng)初始條件誤差、系統(tǒng)計算誤差等。
1.1.1速度誤差方程
根據(jù)慣導系統(tǒng)比力方程推導出的速度誤差微分方程為:
(1)

(2)
1.1.2位置誤差方程
設載體所在的地理緯度為L,經度為λ,高度為h,RM、RN分別為地球的子午圈主曲率半徑和卯酉圈主曲率半徑。VE,VN,VU為載體東向、北向、天向的速度。慣導系統(tǒng)的位置誤差方程可表示為:
(3)
對位置誤差方程的經度、緯度和高度求偏導,可得位置誤差微分方程為:
(4)
1.1.3姿態(tài)誤差方程
經推導,姿態(tài)失準角微分方程為:
(5)

(6)
1.1.4慣性器件誤差方程
將通過標定補償?shù)膽T導系統(tǒng)慣性器件誤差中的常值可由以下微分方程描述:
(7)
式(7)中,εx、εy、εz和▽x、▽y、▽z分別為慣導系統(tǒng)載體坐標系三個坐標軸上陀螺的常值漂移和加速度計的常值偏置。
1.2 基于動桿臂的量測信息誤差補償
慣導系統(tǒng)與武器或運載器固連,與發(fā)射車伺服機構回轉中心有一定的位置偏移即為桿臂矢量。定義桿臂為載體系下伺服機構回轉中心指向慣導系統(tǒng)中心的位置矢量,以Rb表示。桿臂示意圖見圖1。
因為慣導系統(tǒng)所獲得的運動參數(shù)為慣導系統(tǒng)敏感中心的運動參數(shù),在起豎機動過程中,需要進行伺服機構回轉中心到慣導系統(tǒng)之間的動態(tài)剛性桿臂補償,從而得到慣導系統(tǒng)敏感中心的位置、速度量測信息。
1.2.1速度量測信息誤差補償
通過慣導系統(tǒng)陀螺儀實時輸出的數(shù)據(jù)以及桿臂補償,可以獲得慣導系統(tǒng)的實時速度量測信息。即
(10)
1.2.2位置量測信息誤差補償
根據(jù)慣導系統(tǒng)實時輸出的姿態(tài)信息求取載體坐標系至導航坐標系的姿態(tài)轉移矩陣,將載體坐標系下的桿臂矢量信息轉化至導航坐標系下,并且與發(fā)射車伺服機構的回轉中心的地理位置矢量作矢量和,從而獲得慣導系統(tǒng)的實時位置量測信息。即
(8)
(9)
2 Kalman濾波算法
捷聯(lián)慣導起豎機動過程中,采用基于自主量測信息的卡爾曼濾波估計方法,由慣性導航系統(tǒng)誤差方程和慣性器件誤差方程得到濾波狀態(tài)方程,捷聯(lián)解算結果與自主式量測量的位置、速度之差得到量測方程。
2.1 狀態(tài)方程
系統(tǒng)狀態(tài)方程為:
(11)

(12)
式(12)中F1,F(xiàn)2,F(xiàn)3,F(xiàn)4,F(xiàn)5,F(xiàn)6,F(xiàn)7,F(xiàn)8的表達式參見文獻[9];
(13)
2.2 量測方程
系統(tǒng)量測方程為:
Z=HX+V
(14)
(15)

3 起豎過程快速對準仿真及試驗研究
3.1 仿真及結果分析
為了驗證本文提出的起豎過程快速對準方法的可行性和有效性,對傳統(tǒng)的靜基座精對準的方法和本文方法分別進行了相關對準過程的仿真以及對比。
回轉中心所在位置初始緯度設為40°,經度為116°。桿臂長度設為10 m,初始失準角φE、φN、φU分別取為0.05°,0.05°和1°,陀螺儀、加速度計的數(shù)據(jù)頻率為100 Hz。陀螺儀常值漂移取為0.01°/h,隨機漂移取為0.01°/h。加速度計的初始偏差取50 μg,隨機偏差為50 μg。濾波的初始條件中,狀態(tài)變量X的初值X(0)均取為0,初始估計均方誤差陣P(0),系統(tǒng)噪聲強度陣Q和量測噪聲強度陣R對應的取得的值如表1所示。
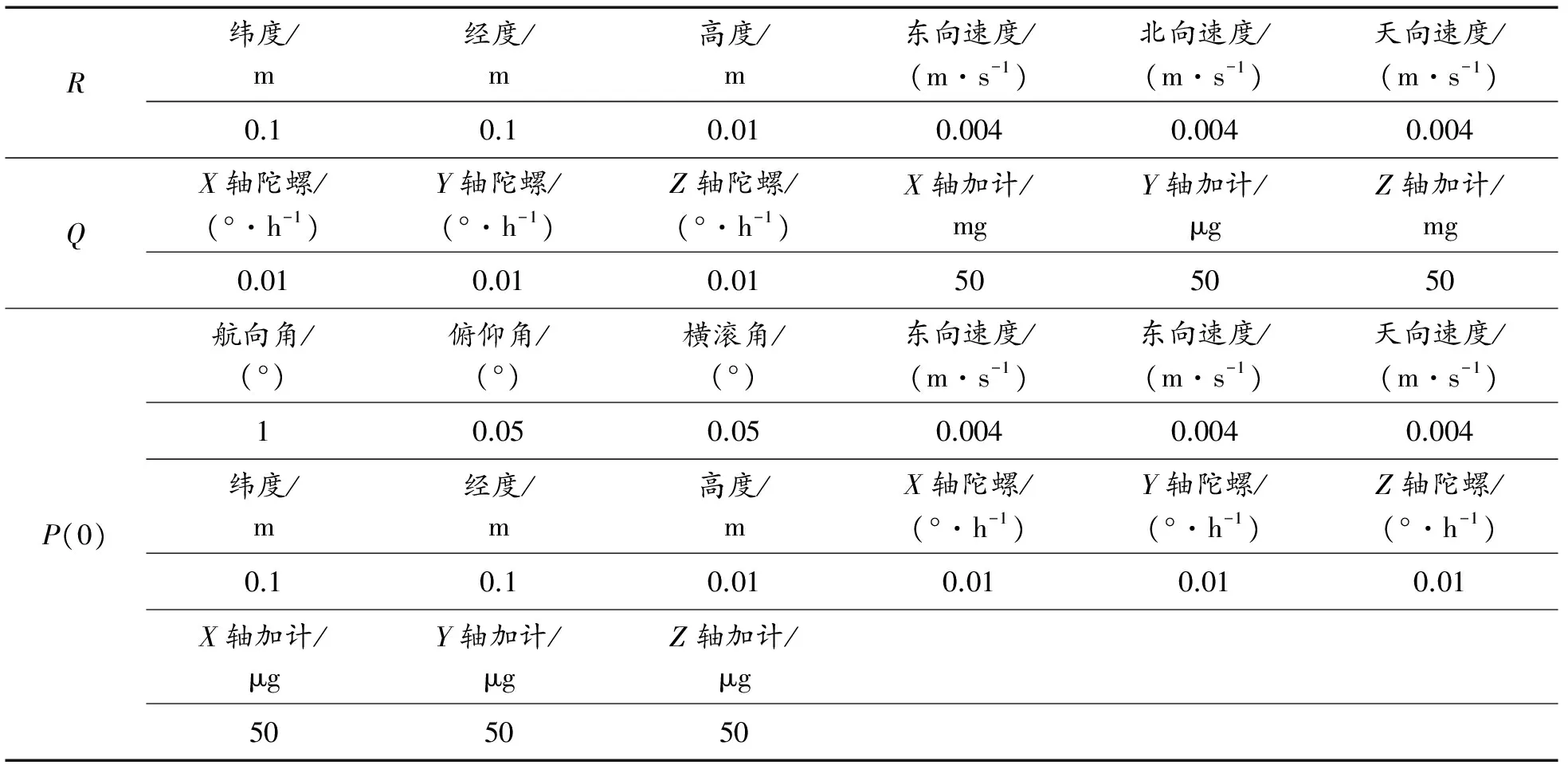
表1 組合濾波參數(shù)
利用軌跡發(fā)生器生成仿真數(shù)據(jù),采用卡爾曼濾波分別對傳統(tǒng)的起豎完成后靜基座精對準和起豎過程快速對準進行仿真分析。兩種不同對準方法的姿態(tài)角誤差估計過程如圖2所示。
由圖2可得,傳統(tǒng)靜基座精對準方法,即在起豎過程完成后進行靜基座精對準,水平姿態(tài)角俯仰角和橫滾角的估計速度快,20 s就基本達到穩(wěn)定,航向角的估計慢,大約在200 s以上。航向誤差角的最終收斂精度為5.8'。圖2中起豎過程快速對準方法,在機動起豎過程開始時就進行對準,俯仰角和橫滾角的估計速度與傳統(tǒng)靜基座精對準方法相當,在20 s左右基本達到穩(wěn)定,但航向角的估計速度比較傳統(tǒng)靜基座精對準方法快,大約在100 s達到穩(wěn)定。航向誤差角的最終收斂精度為3'。
由仿真結果可得,起豎過程快速對準方法與傳統(tǒng)靜基座精對準方法相比,不僅提高了對準速度,而且在較短時間約束下,對準精度也有所提高。
3.2 試驗及結果分析
為驗證本文提出的起豎過程快速對準方法,基于地面起豎裝置的起豎對準試驗進行研究,驗證捷聯(lián)慣導系統(tǒng)起豎過程的對準精度和對準時間,檢驗是否滿足實際工程需求。
將高精度激光陀螺慣導系統(tǒng)精確安裝在光學跟蹤系統(tǒng)工裝上,確定慣導系統(tǒng)敏感中心與工裝測量基準間的位置關系,將工裝精確安裝在模擬彈體適當位置,連同工裝一起裝配到試驗起豎裝置結構上。裝配光學動態(tài)跟蹤系統(tǒng),設置好光學動態(tài)跟蹤儀,實現(xiàn)實時動態(tài)跟蹤慣導系統(tǒng),精確測量慣導系統(tǒng)的位置、姿態(tài)等運動信息,用于后續(xù)檢校起豎對準精度。起豎裝置開始起豎工作后,在裝置起豎過程中采用慣導系統(tǒng)自主測量的角度和角速度信息進行實時動桿臂補償,獲得自主量測信息,并進行快速對準。
伺服機構回轉中心在試驗前通過經緯儀精確測量所在位置,同時精確測得桿臂長為9.194 3 m。起豎過程從初始姿態(tài)開始,旋轉90°后到達結束姿態(tài)。
試驗一共進行了15組,對15組起豎實驗數(shù)據(jù)統(tǒng)計分析結果如圖3所示。
通過地面起豎裝置的起豎環(huán)境快速對準試驗結果可以得出:航向姿態(tài)角對準精度在90s達到6'以內,在105s左右達到4'對準精度,滿足實際工程中起豎對準的精度和快速性需求。
4 結論
本文針對武器或運載器應急發(fā)射對快速對準的需求,提出了一種起豎過程中捷聯(lián)慣導快速對準方法。在靜基座條件下,利用起豎機動過程及動桿臂補償方法獲得自主式量測量,并運用Kalman濾波實現(xiàn)精對準。仿真結果表明,該方法與傳統(tǒng)靜基座精對準相比,提高了對準速度和精度。地面試驗驗證了該方法的有效性。理論分析和試驗結果表明,該方法能夠滿足應急發(fā)射快速對準的需求,具有重要的工程應用價值。
參考文獻:
[1]梁浩,王丹丹,穆榮軍等.車載導彈光學輔助數(shù)學傳遞對準方法[J].兵工學報,2015,36(3):510-515.
[2]王丹丹,陳小軍,王麗華.新對準技術應用展望[J].導彈與航天運載技術,2009 (3):20-22.
[3]FANG J C,WAN D J.A fast initial alignment method for strapdown inertial navigation system on stationary base[J].IEEE Transactions on Aerospace and Electronic Systems,1996,32(4):1501-1504.
[4]LV S L,XIE L,Chen J B.New techniques for initial alignment of strapdown inertial navigation system[J].Journal of the Franklin Institute,2009( 346):1021-1037.
[5]吳楓,秦永元,成研.基于 GPS 的彈載捷聯(lián)慣導動基座傳遞對準技術[J].中國慣性技術學報,2013 (1):56-60.
[6]LUAN H Z,MAO Y L.Study on a method of rapid transfer alignment[C]//Mechatronic Science,Electric Engineering and Computer (MEC),2011 International Conference on.IEEE,2011:1423-1426.
[7]馬志強,林恒,魏瑩瑩.車載傳遞對準技術研究[J].傳感器與微系統(tǒng),2011,30(3):54-56.
[8]Yang G L,WANG Y Y,YANG S J.Assessment approach for calculating transfer alignment accuracy of SINS on moving base[J].Measurement,2014,52(6):55-63.
[9]HU J,CHENG X H.A new in-motion initial alignment for land-vehicle SINS/OD integrated system[C]//2014 IEEE/ION Position,Location and Navigation Symposium-PLANS 2014.IEEE,2014:407-412.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
