電液伺服閥閥芯粘性阻尼系數辨識方法研究*
2018-04-02 02:05:17王書銘蔡存坤左哲清董立靜
航天控制 2018年1期
關鍵詞:系統
王書銘 蔡存坤 左哲清 延 皓 董立靜
1.北京交通大學機械與電子控制工程學院,北京100044 2.北京精密機電控制設備研究所,北京100076
電液伺服系統在航空、航天、艦船、冶金和化工等領域中有著極為廣泛的應用,具有結構緊湊、精度高和響應快[1-3]的優點。電液伺服閥作為電液伺服系統核心元件,可進行快速流量調節,在系統中起到了至關重要的作用[4-7]。由于工作可靠、性能穩定,滑閥一般被用作電液伺服閥的功率放大級。經多年研究,國內外學者已經建立了較為準確的滑閥模型,但由于液壓系統中一些所謂的“軟量”影響,模型中的一些參數較難確定[8-10]。這些“軟量”包括閥芯粘性阻尼系數、液體彈性模量等。閥芯粘性阻尼系數反映了流體粘滯力與閥芯運動速度的關系,是滑閥模型中的重要組成部分,其大小與流體粘度、滑閥結構等有關,但至今仍未找到一種有效的理論計算方法或測試方法。所以,為建立滑閥的精確數學模型,乃至建立電液伺服閥的準確數學模型,需要尋求一種準確、有效的測試方法和辨識方法[11-18],確定閥芯粘性阻尼系數的大小。
1 測試系統基本原理
粘性阻尼測試可以采用2種方法:1)從摩擦力與閥芯速度基本原理出發,結合合適的摩擦模型,擬合出粘性阻尼系數的靜態測試方法[19];2)利用振動系統模型辨識并計算出粘性阻尼系數的頻率特性方法,即動態測試方法。
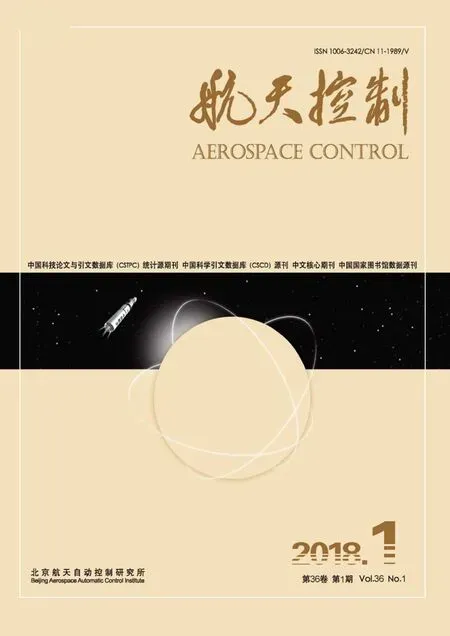
當閥芯行程較長的情況下,可采用靜態測試方法,利用直線位移進給機構驅動閥芯作勻速運動,驅動桿上裝有力傳感器。根據牛頓力學運動定律,此時力傳感器反饋值即為閥芯所受摩擦力,通過測定多個速度下的不同摩擦力值可擬合出閥芯所受摩擦力隨速度變化曲線,從而可求出閥芯粘性阻尼系數σ。但閥芯行程較短時,靜態測試方法所測試到的數據值往往誤差較大,通用性不強,因而本文將采用動態測試方法,其動態測試基本原理如圖1所示。
該測試系統主要由激振器、輕質彈簧、滑閥閥芯及激光位移傳感器A與B組成,實物圖如圖2。
激振器輸出位移信號,驅動質量-彈簧阻尼系統高頻振蕩。閥套右側及激振器側分別安裝有一個激光傳感器,將閥芯振動和激振器的位移信號通過數據采集卡采集進工控機。通過不同頻率和幅值的位移指令信號,使得閥芯在不同頻率下進行高頻振動。通過采集的相應頻率下的位移信號,繪制出系統幅頻-相頻特性曲線,計算機數據分析,擬合出系統的動態特性,從而得到系統的阻尼系數。
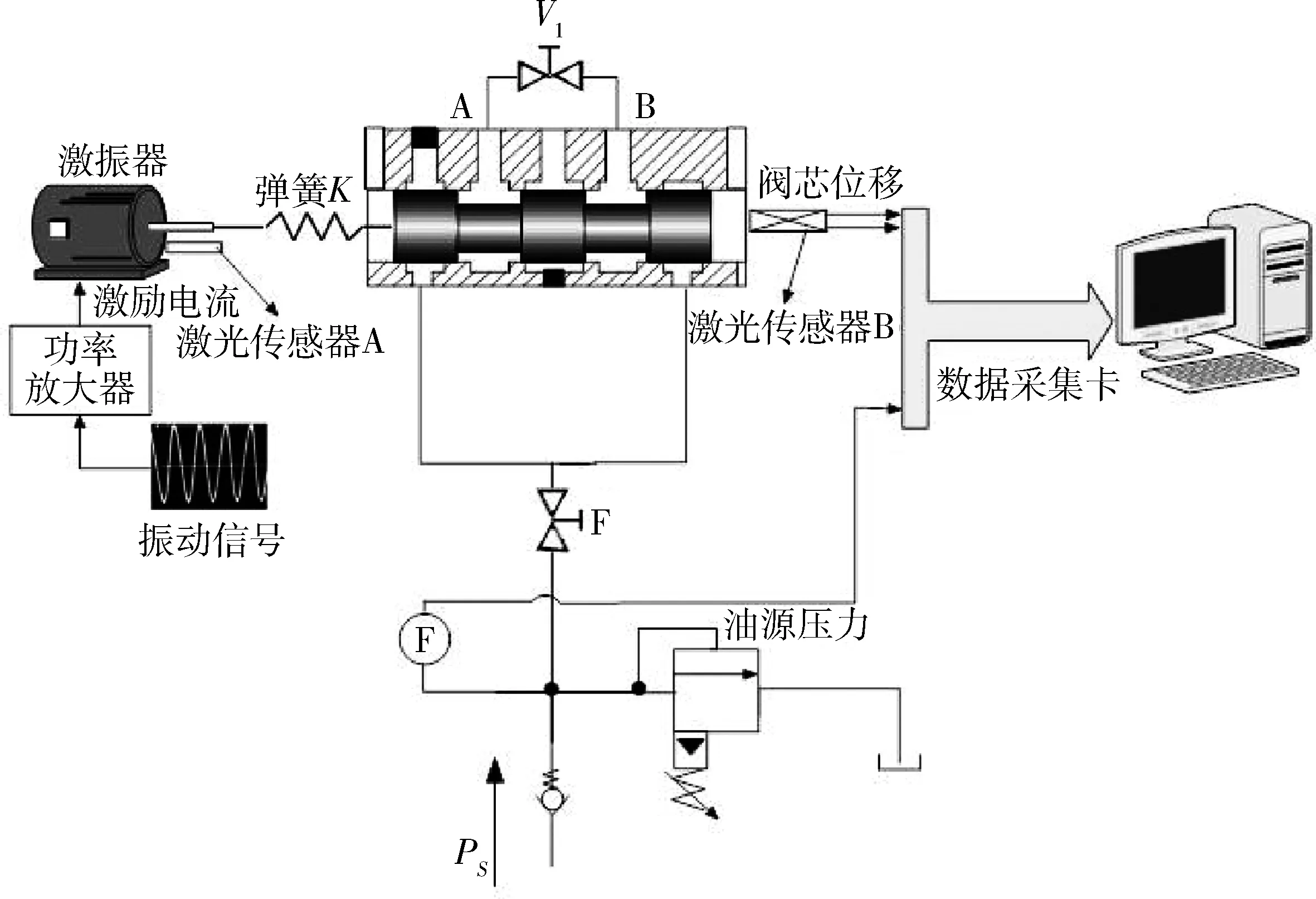
圖1 粘性阻尼系數測試試驗臺原理圖
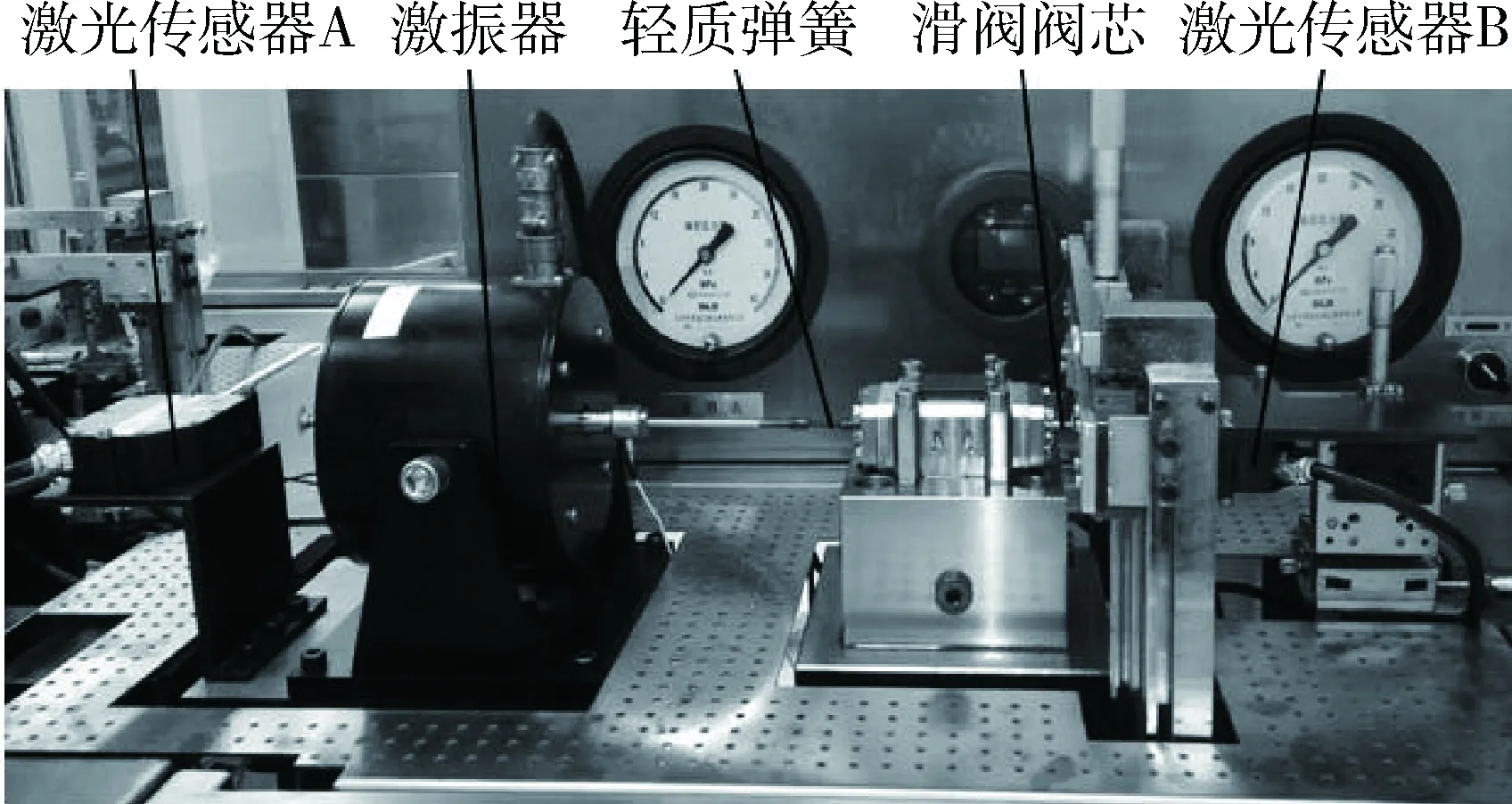
圖2 粘性阻尼系數測試試驗臺實物圖
2 系統建模與辨識
2.1 粘性阻尼系統數學模型
通過對測試系統的結構分析,可以得到粘性阻尼系數測試系統的簡化圖,如圖3所示。
圖3 粘性阻尼系數測試系統模型
其中,yp為激振器給定位移信號,即系統輸入;yl為滑閥閥芯位移,即系統輸出;k為連接彈簧的剛度;m為彈簧右端連接件質量+滑閥閥芯質量;Bc為滑閥粘性阻尼系數。
經過對滑閥閥芯的受力分析,且忽略庫倫摩擦力非線性因素的影響,可得:
(1)
經拉氏變換后,得到系統的傳遞函數為:
(2)
通過傳遞函數,可以得到系統的固有頻率ωn和阻尼比ε:
(3)
(4)
2.2 數據實時處理方法
對測控系統采集到的輸入輸出信號進行數據在線實時處理,可得頻率特征曲線。
利用頻率特性法,傳遞函數W(s)可以表示為:
W(jw)=A(w)ejφ(w)
(5)
依據上述理論,位移傳感器采集不同頻率下系統的輸入輸出位移量,即可得到幅頻特性曲線。
假設實測得到的正弦信號y(t)以一定頻率f進行采樣,需要辨識得到的信號形式為:
f(t)=vsin(wt+φ)
(6)
式中,v和φ分別代表信號的幅值及相位。其中幅值可通過工控機實時程序計算得到,w=2πf是已知的角頻率。
取基函數φ0(t)=cos(wt),φ1(t)=sin(wt),式(6)可展開為:
f(t)=vsin(φ)cos(wt)+vcos(φ)sin(wt)
=A0φ0(t)+A1φ1(t)
(7)
式中,A0=vsin(φ);A1=vcos(φ),則
(8)
那么估計與實測的信號誤差為:
Δ=f(t)-y(t)
(9)
建立優化方程:
(10)
式中,m為系統采樣總數。這就將問題變成了線性極小化問題,根據上式分別對A0,A1求偏微分,得出:
(11)
對上式合并簡化得:
(12)

(13)
那么,可以求出A0與A1,由式(8)可得到該估計信號的相位。
通過上述數據實時處理方法,可以求得該測試系統輸入輸出2個信號的相位差,進而得到該系統的相頻特性。
2.3 系統傳遞函數辨識
根據試驗得到的頻率特征曲線,對其進行辨識,能夠計算出系統的傳遞函數。
通過實驗獲得系統的實頻特性Re(w)和虛頻特性Im(w),利用這些參數估計系統的傳遞函數。
設一個過程的傳遞函數為:
(14)
式中,n>m,對應的頻率響應為:
(15)
而實測的頻率特性數據為:
G*(jwi)=Re(wi)+jIm(wi)
(16)
在頻率點wi上,估計與實測的頻率響應誤差為:

(17)
根據加權最小二乘法準則:
(18)
由式(17)和(18),可以得出:
(19)
式中,
H(wi)=Re(wi)σ(wi)-Im(wi)τ(wi)-α(wi)
F(wi)=Re(wi)τ(wi)-Im(wi)σ(wi)-β(wi)
其中,
(a0=1,n=1,2,…)
(m=0,1,2,…)
即
(20)
解方程式便可求出傳遞函數的系數,從而可以得到系統的固有頻率和阻尼比值,進而求出滑閥的粘性阻尼系數Bc。
3 實驗過程及結果分析
針對某一型號的電液伺服閥滑閥,其閥芯質量m=0.0257kg,分別使用剛度K1=1.5N/mm和K2=1N/mm的2種輕質彈簧對其進行試驗。該測試系統做掃頻試驗時,由上位機發出幅值為2mm的正弦指令信號,其初始頻率設為1Hz,終止頻率為50Hz,頻率間隔為1Hz,每個頻率點做10個周期往復運動。采樣時間根據多媒體定時器取T=0.001s,對測試系統輸入輸出位移信號進行數據采集。通過采集的數據,利用第2.3節介紹的數據實時處理方法,可以得到系統的頻率響應特性曲線,如圖4所示。
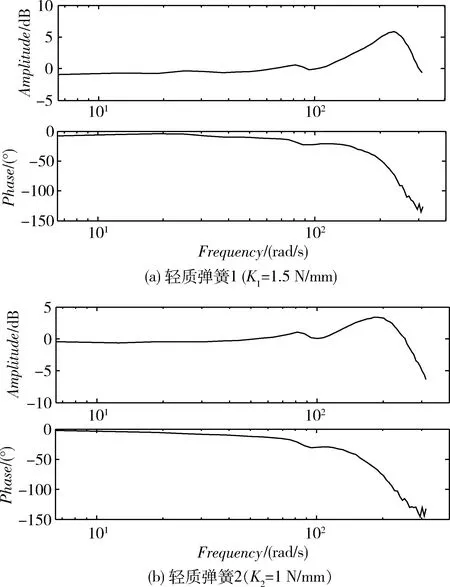
圖4 實驗所得幅頻-相頻曲線
再對所得實驗曲線進行辨識,并將擬合出的系統幅頻特性曲線與實驗結果對比,如圖5所示。
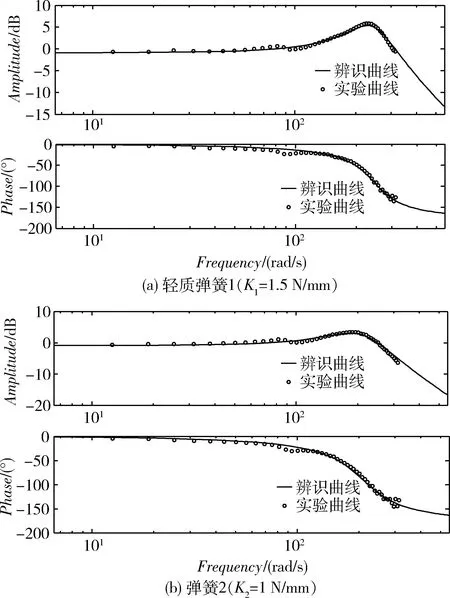
圖5 辨識曲線與實驗曲線對比圖
根據圖5的對比結果,可知辨識結果與實驗所得數據基本吻合,驗證了辨識方法的有效性。
相應的,根據此辨識結果可以得到輕質彈簧1及2系統的傳遞函數,其分別為:
(21)
(22)
據傳遞函數式(21)可以得到輕質彈簧1系統的固有頻率ωn1=244.62rad/s以及阻尼比εz=0.25。根據傳遞函數式(22)可以得到輕質彈簧2系統的固有頻率ωn2=210.35rad/s以及阻尼比ε2=0.314。由阻尼比ε,在已知閥芯質量和彈簧剛度的條件下,根據式(4)得到在不同彈簧剛度條件下測得的滑閥閥芯粘性阻尼系數分別為Bc1=3.11N/(m/s),Bc2=3.18N/(m/s)。從所得結果可以看出,在剛度為1.5N/mm和1N/mm的2種輕質彈簧試驗條件下,得到的粘性阻尼系數的值基本一致,相差僅為2.25%,因此證明本測試方法是有效的、可靠的。
4 結論
閥芯粘性阻尼系數是電液伺服閥模型的重要組成部分。本文提出了一種基于加權最小二乘法準則的動態測試方法,能方便準確地辨識得到閥芯的粘性阻尼系數,為電液伺服閥的精確建模打下了堅實的基礎。根據試驗分析與辨識結果,主要結論如下:
1)將伺服閥閥芯看作一個二階系統,通過測得其輸入和輸出,可直接得到系統粘性阻尼系數,且試驗數據與理論推導相吻合;
2)利用加權最小二乘法辨識的數學方法,可準確得到系統的傳遞函數,這是推導粘性阻尼系數的有效方式;
3)在剛度為1.5N/mm和1N/mm的2種輕質彈簧試驗條件下,得到的粘性阻尼系數值基本吻合,表明該動態測試和辨識方法可在較短的行程內較準確辨識出系統的粘性阻尼系數。
[1] Shang Yaoxing, Jiao Zongxia, Wang Xiaodong, et al. Study on Friction Torque Loading with an Electro-hydraulic Load Simulator [J]. Chinese Journal of Aeronautics, 2009, 22(6):691-699.
[2] 高炳微, 邵俊鵬, 韓桂華. 電液伺服系統位置和力模糊切換控制方法[J]. 電機與控制學報, 2014, 18(5):99-104. (Gao Bingwei, Shao Junpeng, Han Guihua. Fuzzy Switching Control Between Position and Force for Electro-Hydraulic Servo System [J]. Electric Machines and Control, 2014, 18(5):99-104.)
[3] Sangiah D K, Plummer A R, Bowen C R, et al. A Novel Piezo Hydraulic Aerospace Servovalve. Part 1: Design and Modelling [J]. Proceedings of The Institution of Mechanical Engineers Part I Journal of Systems & Control Engineering, 2013, 227(4):371-389.
[4] 康雙琦, 江林秋. 電液伺服閥的發展歷史及研究現狀分析[J]. 資治文摘:管理版, 2009(5):194-194. (Kang Shuangqi, Jiang Linqiu. The Development History and Research Status Analyze of Electro-Hydraulic Servo Valve [J]. Views of Zizhi, 2009(5):194-194.)
[5] Sangiah D K, Plummer A R, Bowen C R, et al. Modelling and Experimental Validation of a Novel Piezo hydraulic Servo-valve [C]. ASME 2011 Dynamic Systems and Control Conference and Bath/ASME Symposium on Fluid Power and Motion Control. 2011:343-350.
[6] 陳彬, 易孟林. 電液伺服閥的研究現狀和發展趨勢[J]. 液壓與氣動, 2005,(6):5-8. (Chen Bin, Yi Menglin. The Present Research and Prospects of Electro-Hydraulic Servo Valve [J]. Chinese Hydraulics & Pneumatics, 2005, (6): 5-8.)
[7] 鄒方晨, 郭棟. 電液伺服閥靜動態性能測試臺的設計[J]. 遼寧工業大學學報(自然科學版), 2016, 36(3):156-159. (Zou Fangchen, Guo Dong. Design of Static and Dynamic Performance Test Device for Electro-Hydraulic Servo Valve [J]. Journal of Liaoning University of Technology (Natural Science Edition), 2016, 36(3):156-159.)
[8] Shin W, Choi H, Shin H, et al. Development of a Direct Drive Servo Valve With Flow Force Compensated Spool [C]. Asme/jsme 2003, Joint Fluids Summer Engineering Conference. 2003:633-637.
[9] 水清皎. SM4-20雙噴嘴擋板式電液伺服閥特性研究[D]. 蘭州理工大學, 2013.(Shui Qingjiao. The Research of Characteristic O-n SM4-20 Twin Falapper-nozzle Servo Valve [D]. Lanzhou University of Technology, 2013: 62-90.)
[10] Pan X. Measurement of Spool Valve Overlap Value of Servo Valve [J]. Journal of Vibration Measurement & Diagnosis, 2009.
[11] Kadri M B. Comparison of Least Square Identification Schemes for a Model-Free Fuzzy Adaptive Controller [J]. Arabian Journal for Science & Engineering, 2014, 39(4):3067-3076.
[12] 宋濤, 于存貴. 基于MATLAB/Simulink液壓伺服系統辨識仿真[J]. 液壓與氣動, 2015,(10):120-123. (Song Tao, Yu Cungui. Hydraulic Servo System Identification Simulation Based on MATLAB/Simulink [J]. Chinese Hydraulics & Pneumatics, 2015,(10):120-123.
[13] Wang D, Ding F. Input-output Data Filtering Based Recursive Least Squares Identification for CARARMA Systems [M]. Digital Signal Processing, 2010, 20(4): 991-999.
[14] 蒙楊超, 董自安, 王珂. 電液比例泵控馬達系統辨識及實驗分析研究[J]. 液壓氣動與密封, 2015,(3):35-40. (Meng Yangchao, Dong Zian, Wang Ke. Identification and Experimental Analysis of Electro-hydraulic Proportial Pump Control Motor System [J]. Hydraulics Pneumatics & Seals, 2015,(3):35-40.)
[15] 姚巍. 自行車機器人系統辨識及MATLAB仿真[D]. 北京郵電大學, 2008. (Yu Wei. System Identification and Simulation of Bicycle Robot [D]. Beijing University of Post and Telecommunication, 2008.)
[16] 于剛. 伺服閥控液壓馬達系統的辨識與控制研究[D]. 山東大學, 2007. (Yu Gang. Study on Identification and Control of Servovalve-Controlled Motor Control System [D]. Shandong University, 2007.)
[18] 田勇. 電液比例閥控馬達液壓系統辨識與恒功率控制策略研究[D]. 長安大學, 2014. (Tian Yong. The Identification of Electro-hydraulic Proportional Valve-controlled Motor System and The Study of Constant Power Control Strategy [D]. Chang’an University, 2014.)
[19] 弓萌野, 劉向東, 賴汝. 一種基于LabVIEW的新型阻尼測試系統設計[J]. 控制工程, 2012, 19(6):1206-1209. (Gong Mengye, Liu Xiangdong, Lai Ru. A Novel Damping Test System Based On LabVIEW [J]. Control Engineering. 2012, 19(6):1206-1209.)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32