高超聲速飛行器的神經網絡PID控制*
2018-04-02 02:09:47和志偉戈新生
航天控制 2018年1期
管 萍 和志偉 戈新生
北京信息科技大學自動化學院,北京100192
高超聲速飛行器具有反應敏捷,機動靈活,攻擊準確等優點,已逐步成為各國關注的焦點[1-3]。不同于傳統飛行器,高超聲速飛行器受其飛行速度、高度以及飛行條件的影響,飛行器氣動參數可能發生無法確定的非線性變化,很難建立精準的數學模型。因此,傳統的控制算法很難滿足高超聲速飛行器姿態控制要求。目前,國內外在高超聲速飛行器姿態控制方面已經取得了一定的突破。文獻[4]采用非線性設計方法,擴張狀態觀測器能估計系統未知不確定性進行動態補償,動態面控制可避免對虛擬指令直接微分,調節速度快,穩態精度高,有較強的強魯棒性。文獻[5]提出狀態相關黎卡提方程方法設計控制器,能夠自適應改變調節速度,優化輸出。文獻[6]采用模糊模型參考自適應控制方法,通過跟蹤參考模型,保證控制效果,對模型變化有較強的自適應性及魯棒性。然而上述方法未考慮飛行器飛行過程中氣動參數的劇烈變化,未驗證飛行器的姿態控制系統對氣動參數攝動的魯棒性。
本文針對高超聲速飛行器飛行過程中氣動參數變化導致的不確定性,將神經網絡PID控制應用于高超聲速飛行器縱向通道的姿態控制中,傳統PID控制具有可靠性高、結構簡單的特點,而將神經網絡與PID控制相結合形成的神經網絡PID控制既具有傳統PID控制的特點,又具有神經網絡的自主學習、自適應的特點,能夠對PID控制參數進行合理推理計算和在線優化,增強控制系統的魯棒性。針對高超聲速飛行器動力學模型和運動學模型設計了高超聲速飛行器的單神經元PID控制器和PID神經網絡控制器,并推導了權值調整的學習算法。在線優化控制器的參數,使得高超聲速飛行器的姿態控制系統能有效地抑制氣動參數的變化,仿真結果也驗證了該控制方法的有效性。
1 高超聲速飛行器的縱向模型
對高超聲速飛行器的運動特性進行解析,得到高超聲速飛行器俯仰通道的數學模型為[7]:
(1)
(2)

某高超聲速飛行器的氣動參數如下[8]:
CL(α)=-8.19×10-2+4.70×10-2×Ma+
1.86×10-2×α-4.73×10-4×(Ma×α)-
9.19×10-3×Ma2-1.52×10-4×α2+5.99×

1.-7×(Ma×α)2+4.617×10-5×Ma3-
7.887×10-5×α3;
CM(q)=-1.36+3.86×10-1×Ma+7.85×
1.-4×α+1.40×10-4×(Ma×α)-5.42×
1.-2×Ma2+2.36×10-3×α2-1.95×10-6×
(Ma×α)2+3.80×10-3×Ma3-1.48×10-3×α3;
CM(δe)=-5.67×10-5-1.51×10-6×
Ma-6.59×10-5×α+2.89×10-4×δe-
4.46×10-6×(Ma×α)-5.87×10-6×(Ma×δe)
代入式(1)和(2)可得系統的運動學方程和動力學方程為:
(3)
(4)

5.87×10-6×Ma);g1為常數;f1(α)為隨攻角α變化的非線性函數;g2為與飛行馬赫數Ma有關的常數,當飛行馬赫數Ma確定時,g2也為確定的常數;f2(α,q)為隨攻角α和俯仰角速度q變化的非線性函數。
高超聲速飛行器的縱向通道呈現非線性、強耦合性,當氣動參數(CL,CM)大范圍變化時,很難建立精準的數學模型。因此,控制的主要目標是設計一個合適的控制量即舵偏δe,使高超聲速飛行器在氣動參數(CL,CM)大范圍變化時能快速精準的跟蹤攻角指令信號。
2 神經網絡PID控制器設計
基于多時間尺度,將高超聲速飛行器的姿態模型劃分為快回路和慢回路,控制系統結構如圖1所示。快回路為俯仰角速度反饋,變化迅速,采用神經網絡控制器,產生控制力矩;慢回路為攻角反饋,變化緩慢,采用傳統的PID控制器,產生快回路制導指令。在外環控制器設計過程中,以預期攻角指令信號作為輸入,攻角預期值αref與實際值α的偏差作為外環控制器的輸入,外環控制器的輸出即俯仰角速度qref作為內環的輸入;內環輸入的角速度信號qref與實際的角速度q的偏差作為神經網絡控制器的輸入,輸出為控制力矩δe,作為高超聲速飛行器動力學模型的輸入。通過控制飛行器的舵偏δe來實現對給定攻角指令信號的穩定跟蹤。針對這2個回路分別設計PID控制器和神經網絡PID控制器。
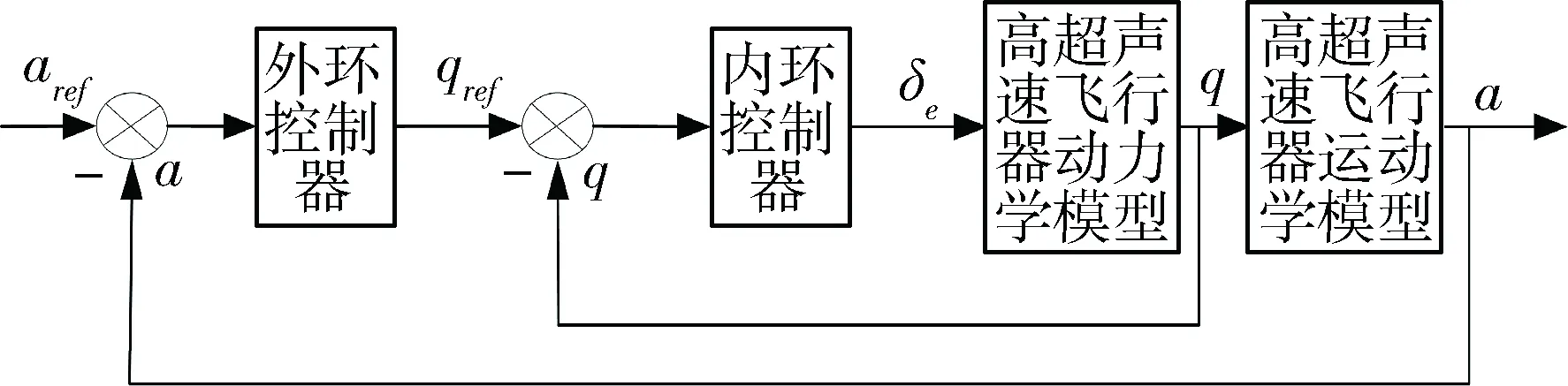
圖1 高超聲速飛行器神經網絡PID控制系統結構圖
2.1 外環回路控制器設計
給定攻角預期值αref,反饋的實際攻角值為α,則此時攻角的誤差eα為
eα=αref-α
(5)
eα作為外環PID控制器的輸入,控制器的系數分別為kp,ki和kd,外環控制器的輸出qref為
(6)

2.2 內環回路控制器設計
俯仰角速度期望值為qref,實際值為q,則俯仰角速度的偏差eq為
eq=qref-q
(7)
針對高超聲速飛行器的內環控制器設計,分別采用單神經元PID控制和PID神經網絡控制。
2.2.1 單神經元PID控制器設計
將單神經元與PID相結合,構成高超聲速飛行器的單神經元PID控制器[9]。
PID的位置式控制為
(8)
由式(8)得到PID的增量式控制為

(9)
由此得到高超聲速飛行器的單神經元PID控制算法,單神經元PID控制結構圖如圖2所示。
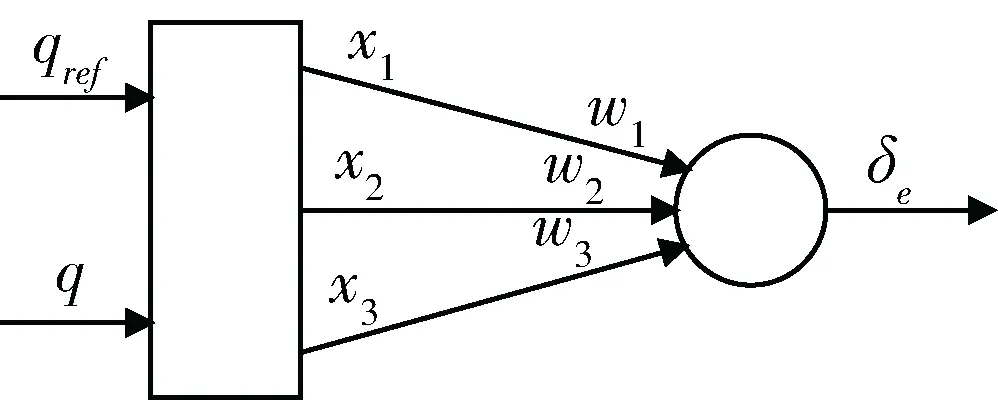
圖2 單神經元PID控制結構圖
(10)
式中,x1(k)=eq(k);x2(k)=eq(k)-eq(k-1);x3(k)=eq(k)-2eq(k-1)+eq(k-2);K為神經元的比例系數;wi是神經元的權值。
采用Hebb學習規則,得到權值調整的學習算法:
w1(k)=w1(k-1)+ηIeq(k)δe(k)x1(k)
w2(k)=w2(k-1)+ηPeq(k)δe(k)x2(k)
w3(k)=w3(k-1)+ηDeq(k)δe(k)x3(k)
(11)
對積分、比例和微分項中的權值wi分別采用了不同的學習速率ηI,ηP,ηD,以便對不同的權系數分別進行調整。
2.2.2 PID神經網絡控制器設計
將神經網絡與PID結合,構成高超聲速飛行器的PID神經網絡控制器。
PID神經網絡的結構如圖3所示:
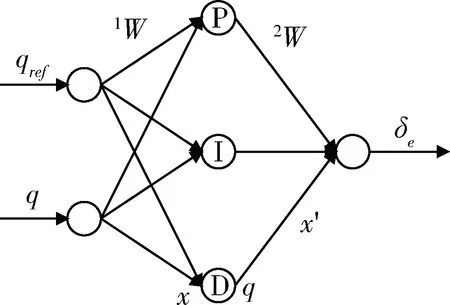
圖3 PID神經網絡結構圖
輸入層: 輸入[qref,q],輸出與輸入相等。
隱層: 輸入
xi(k)=qred-q,i=1, 2, 3
(12)
輸出
q1(k)=x1(k)
(13)
q2(k)=q2(k-1)+x2(k)
(14)
q3(k)=x3(k)-x3(k-1)
(15)
輸出層:
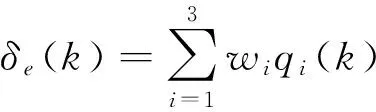
(16)
高超聲速飛行器的PID神經網絡控制器采用反向傳播學習算法,設準則函數
(17)
在要求的限度之內,經由k步迭代后,權值調整算法為:
(18)
(19)
(20)
等效替代,它的正負可以決定其在權值調整算法中對收斂方向所起的作用。式(19)可化為
(21)
將式(21)代入式(18)得
w1(k+1)=w1(k)+η2·eq(k)·q1(k)
w2(k+1)=w2(k)+η2·eq(k)·q2(k)
w3(k+1)=w3(k)+η2·eq(k)·q3(k)
(22)
式中,η2是學習步長,對隱層至輸出層的權值進行調整。
單神經元PID控制實質上用單神經元實現了PID增量式控制,PID神經網絡控制用神經網絡實現了PID的位置式控制,二者都借助神經網絡的學習使PID神經網絡既具有PID控制的魯棒性,又使PID參數能夠在線調節,具有較強的自適應能力。
3 仿真研究
分別將單神經元PID控制器和PID神經網絡控制器應用于高超聲速飛行器縱向通道的姿態控制中,進行仿真研究。取高超聲速飛行器飛行馬赫數Ma=5,飛行高度為36.576km。外環控制器參數kp=50,ki=0.6,kd=0.1。仿真過程中,采樣周期τ=0.001s。在不同的控制律下,攻角的階躍響應曲線如圖4所示,攻角的方波響應曲線如圖5所示,階躍響應時的舵偏響應曲線如圖6所示,方波響應時的舵偏響應曲線如圖7所示。
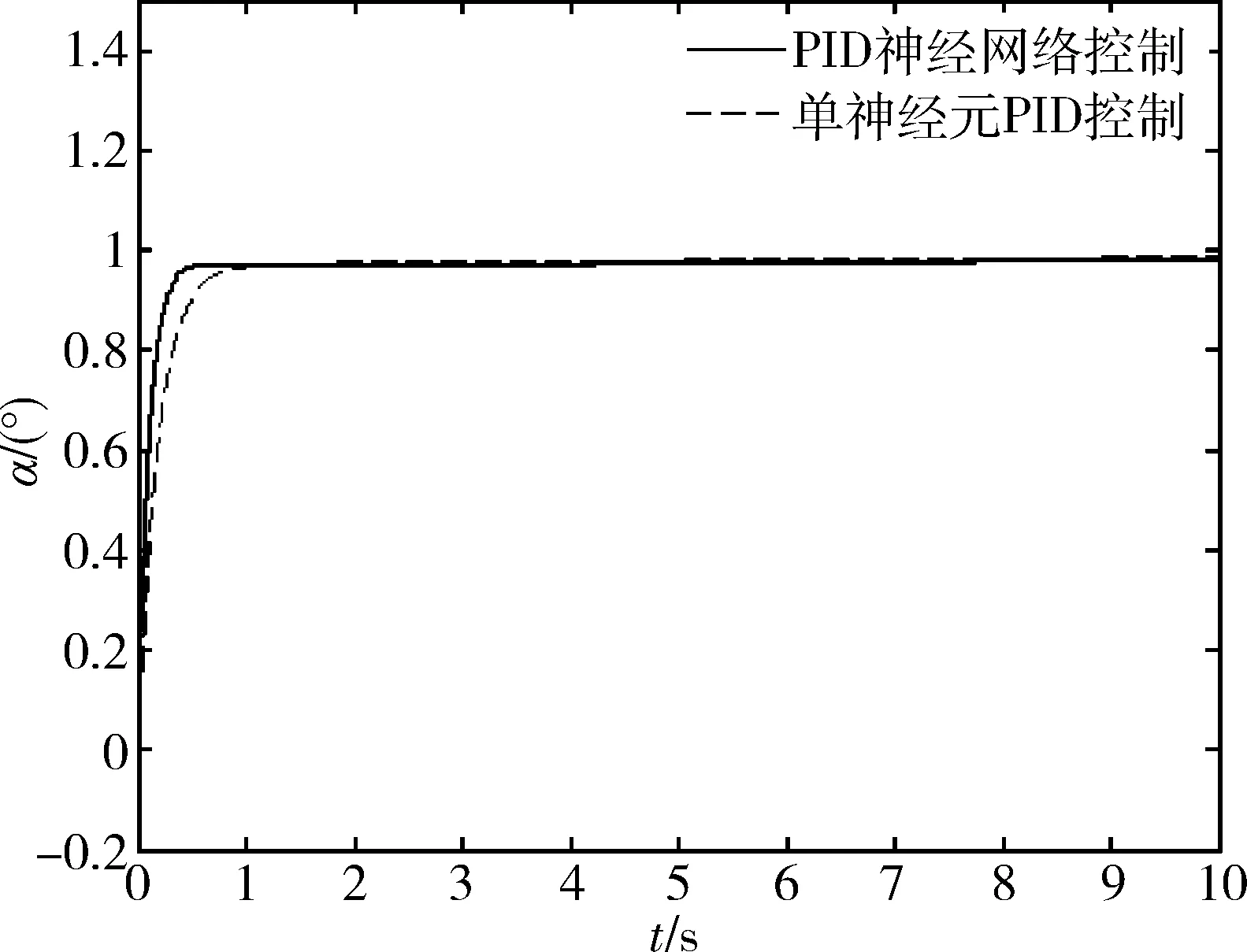
圖4 攻角階躍響應曲線
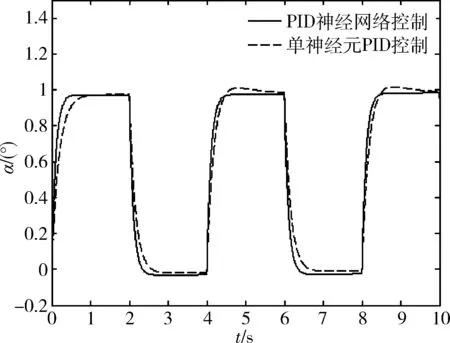
圖5 攻角方波響應曲線
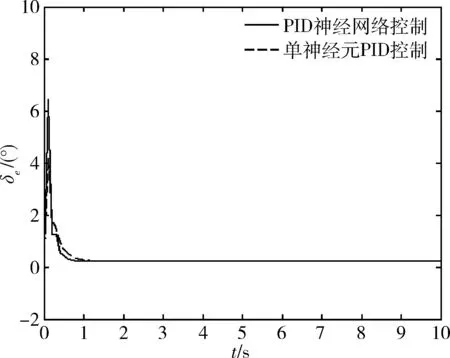
圖6 階躍響應時舵偏角的響應曲線
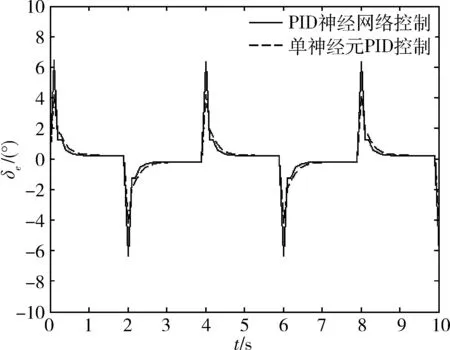
圖7 方波響應時舵偏角的響應曲線
從仿真結果可看出,PID神經網絡控制系統與單神經元PID控制系統都能夠在保證沒有超調的情況下快速跟蹤攻角指令信號,但單神經元PID控制系統調節時間約為1.0s,而PID神經網絡控制系統的調節時間小于0.5s。由此可見,PID神經網絡控制系統無超調,調節時間短,無穩態誤差,具有更好的動靜態性能和較好的控制品質。
由于高超聲速飛行器惡劣的飛行環境,氣動參數變化范圍大,因此要求高超聲速飛行器的控制器要具有較強的魯棒性。為了檢驗PID神經網絡控制系統在氣動參數變化范圍大情況下控制系統的穩定性,分別在氣動參數變化±30%和±50%的情況下進行仿真研究。氣動參數變化+30%、+50%、-30%和-50%時不同控制器下攻角的階躍響應曲線分別如圖8~11所示。
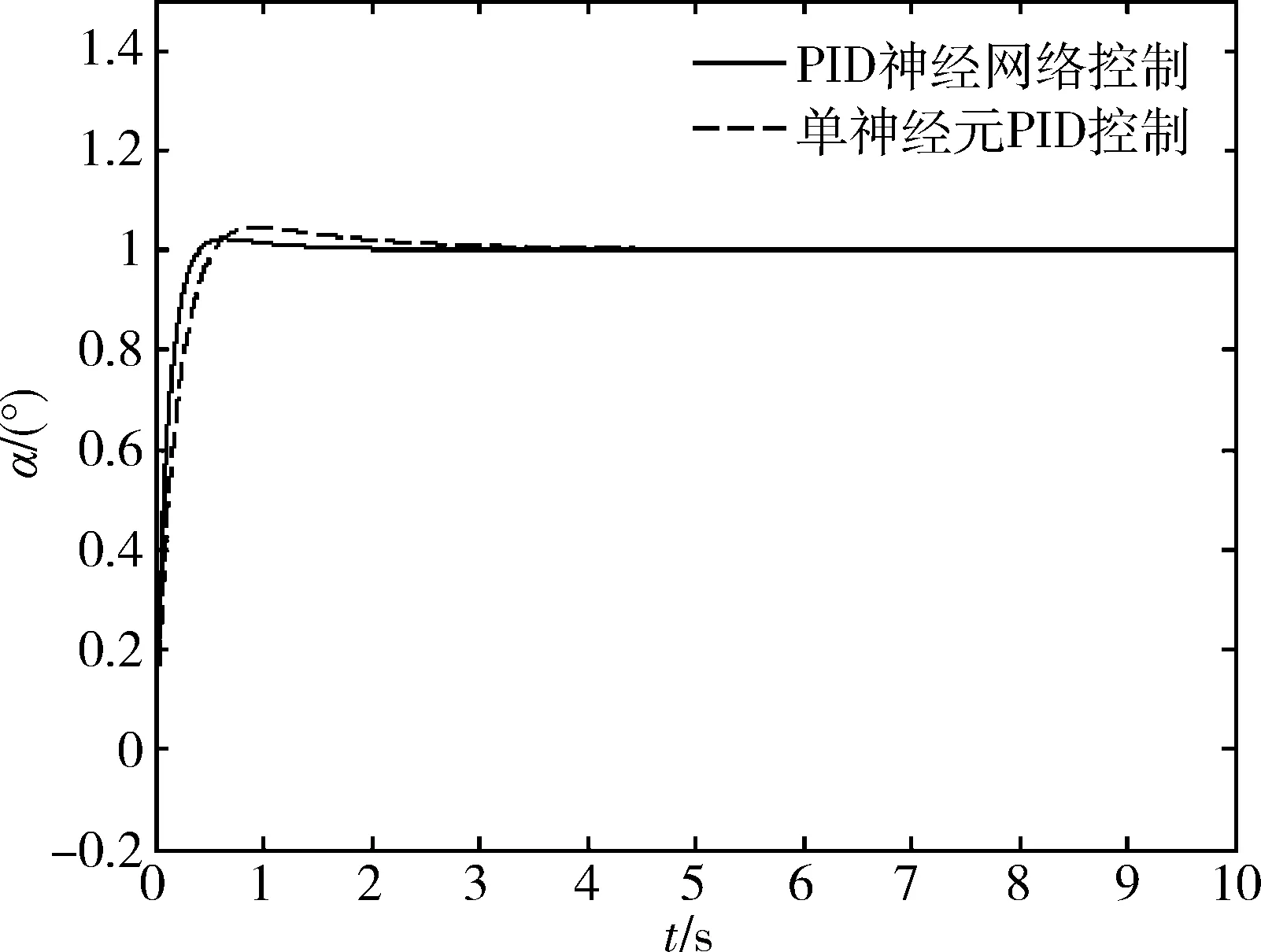
圖8 氣動參數變化+30%時的攻角響應曲線
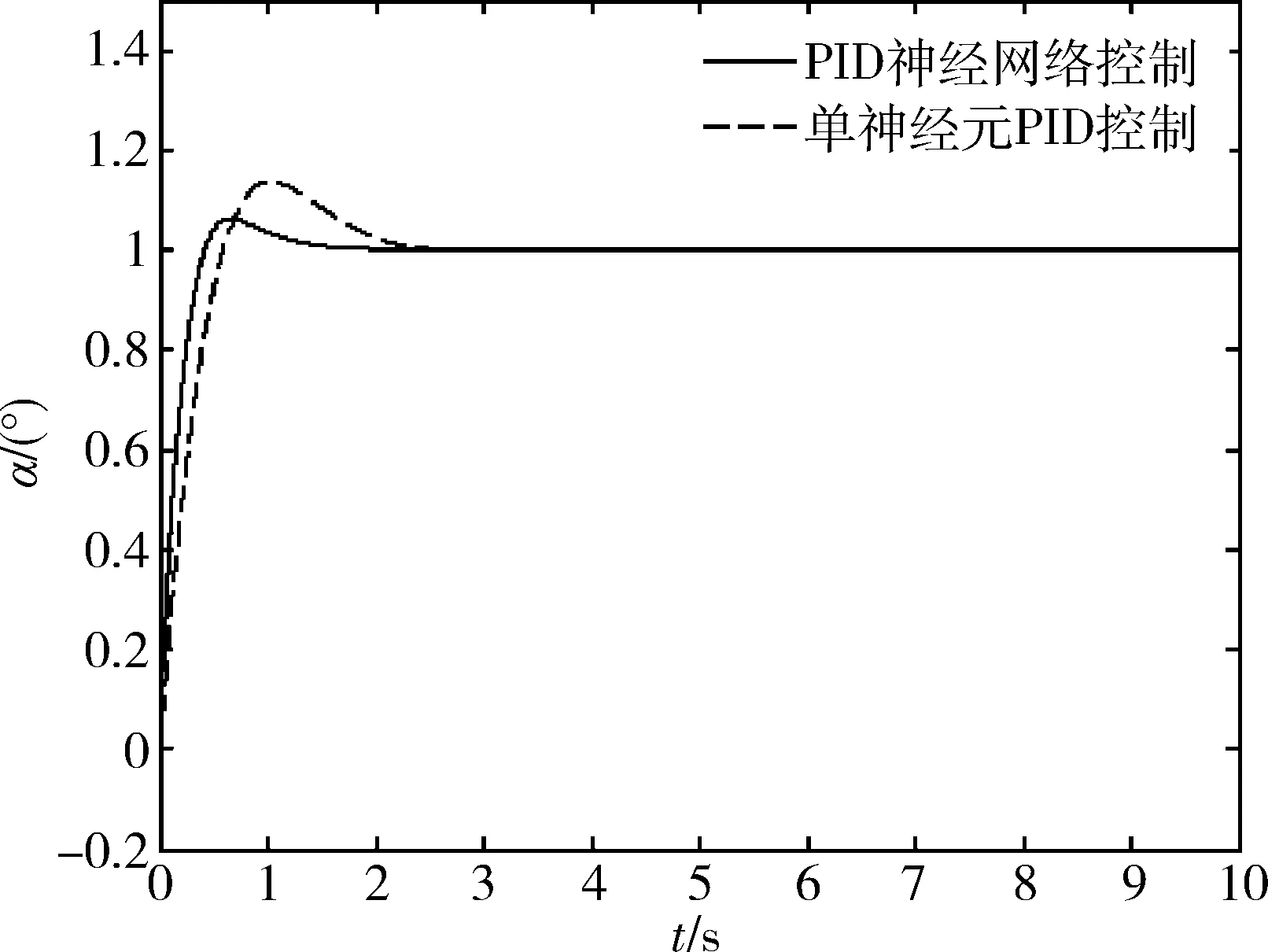
圖9 氣動參數變化+50%時的攻角響應曲線
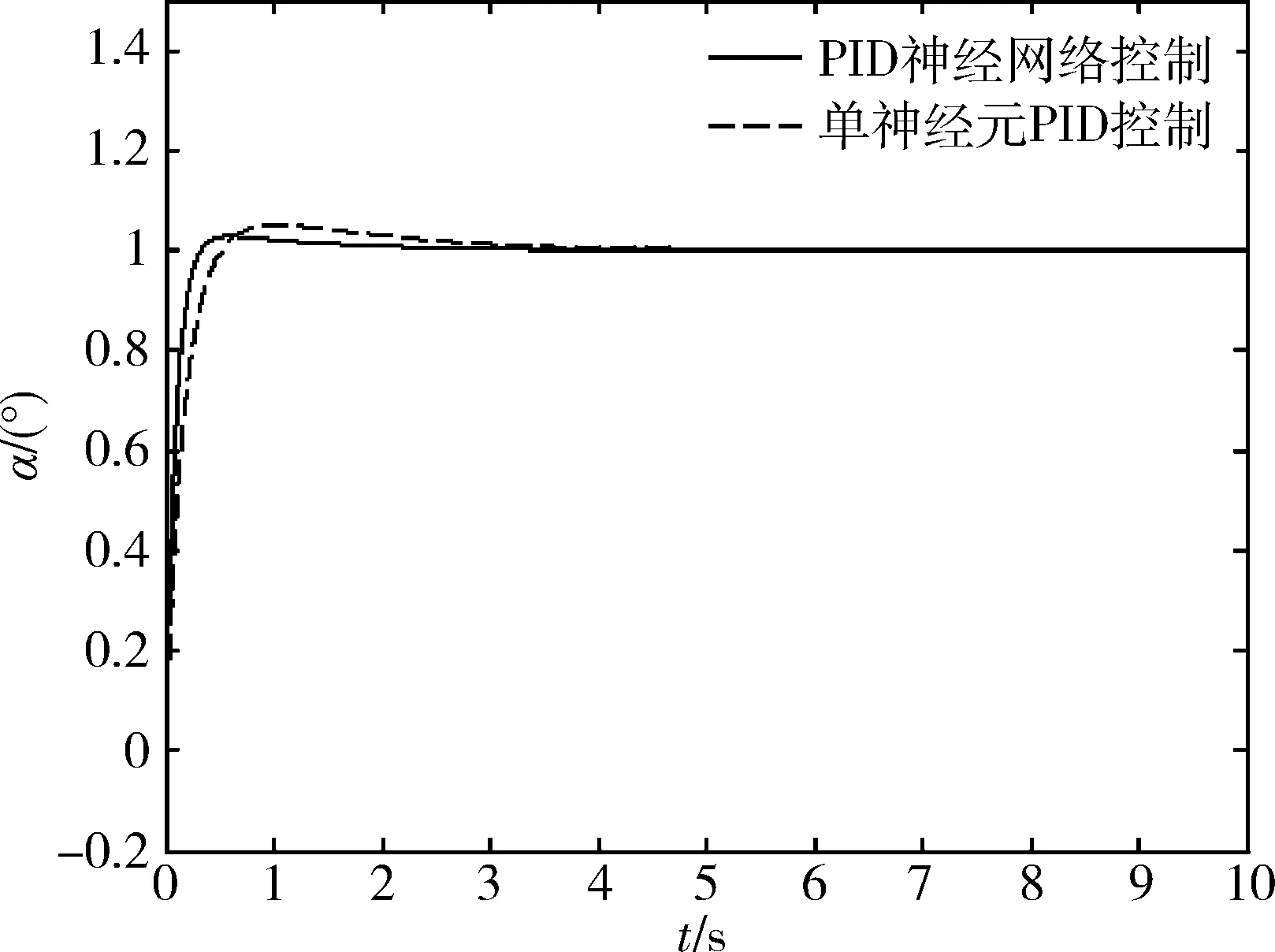
圖10 氣動參數變化-30%時的攻角響應曲線
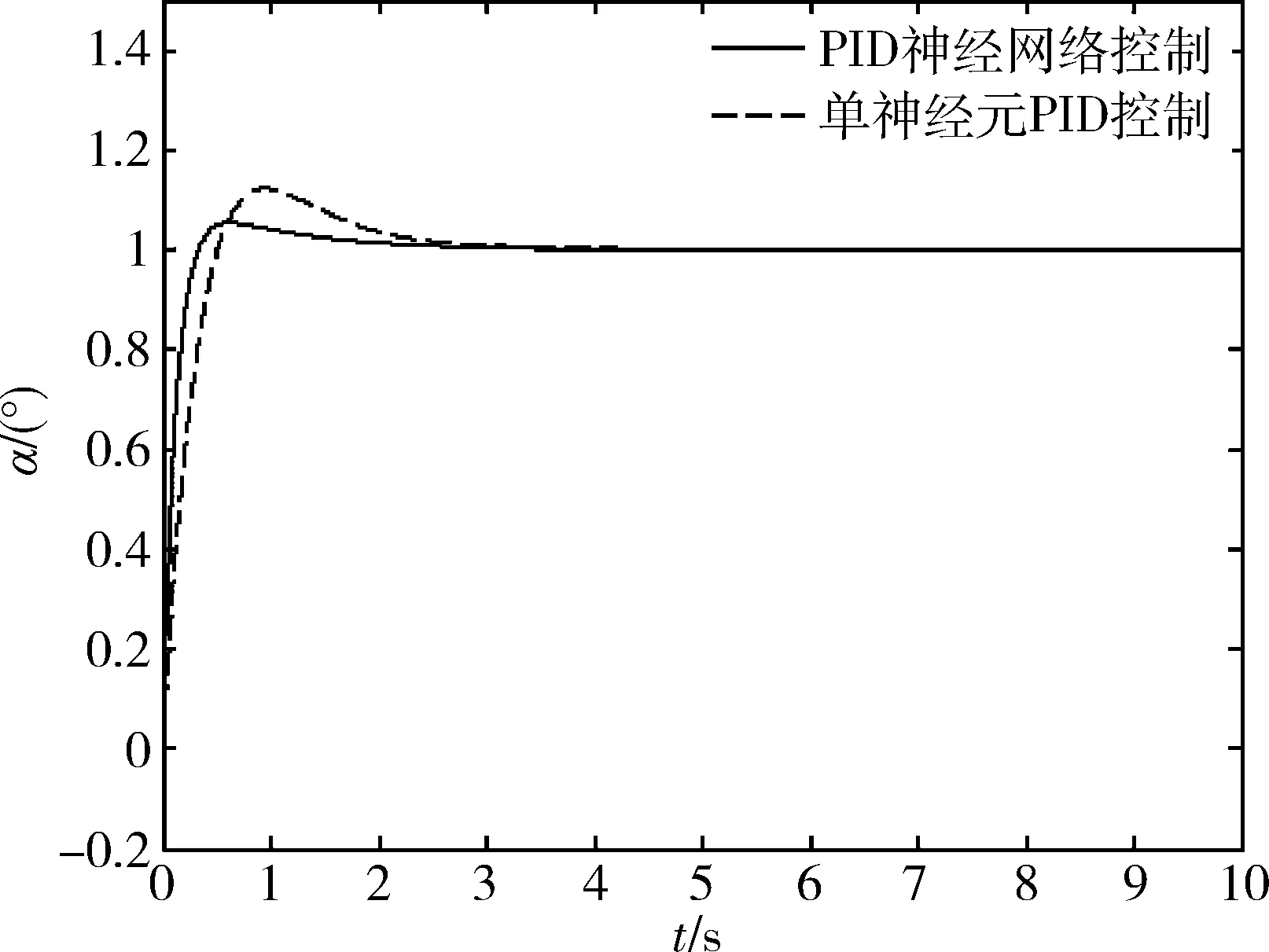
圖11 氣動參數變化-50%時的攻角響應曲線
從仿真結果可看出,2種控制器均能有效抑制氣動參數變化。然而與單神經元PID控制相比,由于PID神經網絡神經元個數增多,可調參數調整靈活,因此自適應能力更強。仿真結果顯示,在氣動參數劇烈變化的情況下,單神經元PID控制調節時間較長,超調量較大,而PID神經網絡控制系統超調量小,能較快達到穩定,調節時間仍然較短,穩態誤差也能達到控制精度范圍,因此PID神經網絡控制系統對氣動參數的變化有較強的抑制作用。而且,PID神經網絡與單神經元PID控制相比更易于調整參數,設計方法更加簡單。
4 結論
將神經網絡控制算法與PID控制相結合應用到高超聲速飛行器縱向通道的姿態控制中,針對高超聲速飛行器的動力學模型和運動學模型設計了單神經元PID控制算法和PID神經網絡控制算法,并推導了權值調整的學習算法,實現了PID參數的在線優化,使其不依賴于被控對象精確的數學模型,并增強高超聲速飛行器姿態控制系統對氣動參數攝動的魯棒性。仿真結果表明,高超聲速飛行器的神經網絡PID控制系統不僅有較好的跟蹤性和穩定性,對攻角階躍指令和方波指令有較高的跟蹤精度和較快的跟蹤速度,而且能抑制氣動參數變化的影響,有較強的魯棒性。神經網絡PID控制算法簡單,魯棒性強,易于實現,具有廣闊的工程應用前景。
[1] 陳亞飛, 陳敬一. 巴西14-X高超聲速飛行器計劃發展綜述[J].飛航導彈, 2013, 8(8):9-12. (Chen Yafei, Chen Jingyi. Brazilian 14-X Hypersonic Aerospace Vehicle Project [J]. Winged Missiles Journal, 2013, 8(8): 9-12.)
[2] 安慧. 美國的高超聲速計劃[J].太空探索, 2013, 7(7): 22-27. (An Hui . Hypersonic Program in the United States [J]. Space Exploration, 2013, 7(7): 22-27.)
[3] 譚詩利, 王潔, 王鵬飛. 基于反演的高超聲速飛行器動態面滑模控制[J]. 航天控制, 2016, 34(4): 23-28. (Tan Shili, Wang Jie, Wang Pengfei. The Dynamic Surface and Sliding Mode Controller Design for Hypersonic Vehicles [J]. Aerospace Control, 2016, 34(4): 23-28.)
[4] 劉曉東, 黃萬偉, 禹春梅.含擴張狀態觀測器的高超聲速飛行器動態面姿態控制[J].宇航學報, 2015, 8(36): 916-922.(Liu Xiaodong, Huang Wanwei, Yu Chunmei. Dynamic Surface Attitude Control of Hypersonic Vehicle Containing Extended State Observer [J]. Journal of Astronautics, 2015, 8(36): 916-922.)
[5] 晏資湘.基于SDRE方法的高超聲速飛行器姿態控制[J]. 導彈與航天運載技術, 2015, 3(3): 10-12.(Yan Zixiang. Hypersonic Vehicle Attitude Control Based on SDRE [J]. Missiles and Space Vehicles, 2015, 3(3): 10-12.)
[6] 程仙壘, 劉魯華, 湯國建. 高超聲速飛行器模糊模型參考自適應控制方法[J]. 航天控制, 2014, 32(4): 13-18.(Cheng Xianlei, Liu Luhua, Tang Guojian. The Research on Fuzzy Model Reference Adaptive Control for Hypersonic Vehicle [J]. Aerospace Control, 2014, 32(4): 13-18.)
[7] 李惠峰.高超聲速飛行器制導與控制技術[M]. 北京: 中國宇航出版社, 2012:54-85.(Li Huifeng. Guidance and Control Technology of Hypersonic Vehicle [M]. Beijing: China Aerospace Publishing House, 2012: 54-85.)
[8] Shahriar Keshmiri, Richard Colgren, Maj Mirmirani. Development of an Aerodynamic Database for a Generic Hypersonic Air Vehicle [R]. San Francisco:AIAA, 2005-6257,2005.
[9] 劉金琨.先進PID控制及其MATLAB仿真[M].北京: 電子工業出版社, 2003: 87-96. (Liu Jinkun. Advanced PID Control and Its MATLAB Simulation [M]. Beijing: Electronic Industry Press, 2003: 87-96.)