RLV末端能量管理段的軌跡規劃及制導策略研究
2018-04-02 02:04:46穆凌霞王新民馬天力
航天控制 2018年1期
穆凌霞 李 平 王新民 馬天力
西北工業大學自動化學院,西安 710072
近年來,先進的軌跡規劃及制導技術作為提高可重復使用運載器(RLV)自主性、降低成本的重要手段之一,受到了廣泛關注。其中,末端能量管理(TAEM)的軌跡規劃及制導是保證RLV安全返回的關鍵技術之一[1]。
早期的航天飛機TAEM制導策略[2-3],將地面航程設計成4段,其中航向校正圓柱(Heading Alignment Cylinder, HAC)采用的半徑及位置固定,縱向制導采用能量剖面,為了預測地面軌跡和待飛距離,將機翼保持水平,忽略了滾轉角對升力的影響,而升力會嚴重改變飛行器的能量和航程。這種策略是在當時的計算機存儲及運算能力的限制下的折衷選擇。縱橫向解耦、離線軌跡的思想導致RLV在自主導引飛行時存在一些固有的局限性:1)離線策略增加了任務前規劃的時間和任務花費,并導致RLV在飛行過程中嚴重依賴預先加載于機載計算機中的軌跡。在突發情況下,只能跟蹤預先規劃好的有限的應急軌跡,制約了RLV自主修復的能力;2)縱橫向解耦的設計策略,難以保證RLV末端飛行狀態的控制精度,而且將飛行路徑限制在一個狹小的標稱飛行走廊內難以應對非標稱情況。文獻[4-6]在航天飛機TAEM軌跡設計的方法上進行了改進,通過HAC位置和半徑的方法設計地面航程,將高度剖面規劃為地面航程的函數,得到由多個幾何參數決定的參考軌跡。利用能量航程比的關系,求解軌跡上各點能量及狀態,最后判斷終端能量以及約束是否滿足要求,求得可行軌跡解集,擇優選擇得到滿足TAEM要求的最優參考軌跡。該算法可在線使用,提高了RLV對不同初始能量的自適應能力,但是因其繼承了傳統的縱橫向解耦的思想,導致制導精度有限。
文獻[7-10]研究了一種基于內核提取的次優節點應用的TAEM三維軌跡生成方法。該方法采用的是縱橫向耦合的質心運動方程,因此所得的軌跡參數及控制量更精確。但是,設計橫側向軌跡時,利用了飛行器的最大轉彎能力,這一特點限制了RLV在非標稱情況下進行軌跡調整的能力,從而制約了非標稱情況下的自主飛行能力。文獻[11]則在上述方法基礎上,對軌跡迭代求解邏輯和地面軌跡機動方式進行了改進,加快了軌跡的生成速度,提高了精度和適應性。
在已有研究的基礎上,本文提出了一種TAEM三維軌跡規劃算法及橫向制導策略:設計了分段地面軌跡,可調參數為HAC的位置和大小及轉彎模式,提高了對高低能量的適應能力;設計了三維軌跡迭代算法,以KEP運動方程為基礎并利用滾轉角剖面,迭代生成滿足縱向剖面的三維軌跡;設計了縱向位置校正算法,通過對可調參數的迭代,使TAEM末端狀態滿足要求;設計了HAC段和預著陸段的橫向制導律,通過建立橫向制導的數學模型,從理論上給出了詳細的制導律設計過程。
1 TAEM軌跡生成算法
1.1 算法基礎
在以時間為自變量的傳統RLV質點動力學方程[4]的基礎上,利用內核提取協議(Kernel Extraction Protocol, KEP)[7],建立以高度為自變量、動壓為狀態變量的KEP動力學方程,有:
(1)
(2)
(3)
(4)
(5)
(6)
其中,自變量h為高度;狀態量(q,γ,χ,x,y,S)分別為RLV的動壓、航跡傾斜角、航跡方位角、縱程、橫程和地面航程;μ為滾轉角;m為RLV的質量;g為重力加速度,在TAEM飛行范圍內可取常值;CL和CD為升力和阻力系數,為迎角α和馬赫數的函數。
注意:該KEP運動方程提取了RLV運動的主要特征。考慮到動壓對RLV安全飛行的意義,利用動壓替代速度作為狀態變量;考慮到RLV在末端不涉及與時間相關的節省燃油、快速性等問題,利用高度替代時間作為自變量。
為了完成后續軌跡的規劃,首先設計代表縱向特征的動壓剖面,動壓隨高度的變化關系,如式(7)所示:
qref(h)=α0+α1h+α2h2+α3h3
(7)
對式(7)求導有
(8)
式中,α0,α1,α2和α3為待設計參數。
根據已知的起點、終點處的動壓和高度信息,引入終點處動壓變化率為0的約束,以及設定中間某高度處的動壓值,構成4個約束方程,可確定上述參數的值。
注意:終點處動壓變化率為0,為準平衡滑翔假設,符合緊接著TAEM段的進場著陸段(Approach & Landing, AL)的準平衡滑翔的假設。
設計地面軌跡如圖1所示,在傳統的TAEM分段軌跡的基礎上,增加了對HAC位置和半徑大小的調整以及2種轉彎模式的選擇,以提高制導系統的自適應能力。轉彎模式有跨越式和直接式2種,如圖1所示,當RLV起點與HAC在跑道同側為直接式,否則為跨越式,采用該策略可以確保當RLV在初期再入段結束時具有不同的能量時,均能通過合適的轉彎模式選擇以及HAC的調整實現精確著陸。圖1中,TAEM段開始于TEP(Terminal Entry Point)點,經歷的4段飛行路線依次為:捕獲段、直線飛行段、HAC段和預著陸段。
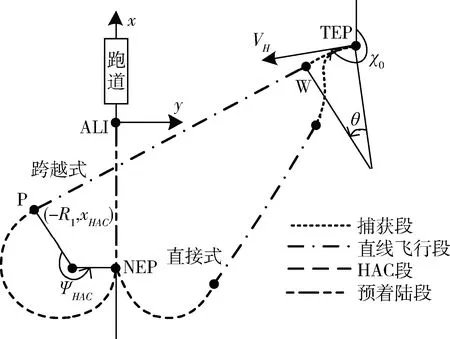
圖1 地面軌跡設計

(9)
根據協調轉彎原理,利用上述航程的大小,計算在滾轉角指令的分段函數如下:
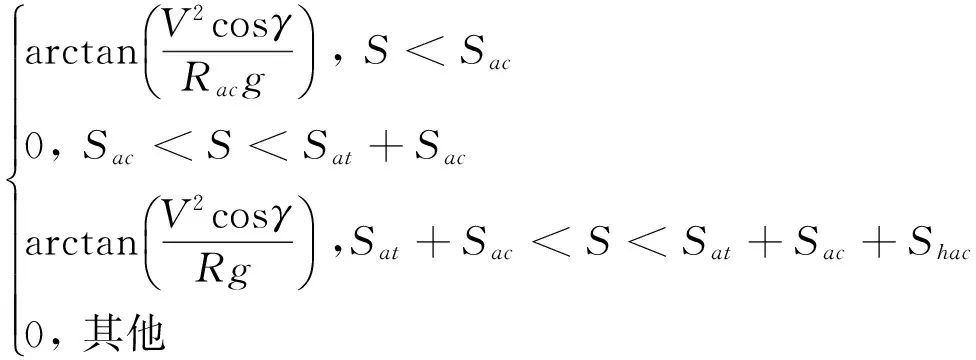
(10)
1.2 算法設計
在上述動壓剖面和地面軌跡的基礎上,設計TAEM三維軌跡生成算法流程如圖2所示,在每個高度節點上,利用2個嵌套回路迭代求解滿足RLV運動方程的狀態變量。內環使用割線法,調節迎角使得實際與期望的動壓變化率相等,然后根據式(10)計算滾轉角,使用割線法調節航跡角使實際與期望的動壓一致,計算當前高度節點上的地面航程,為下一節點的滾轉角的計算作鋪墊,記錄所有狀態并進入到下一個高度節點的循環。
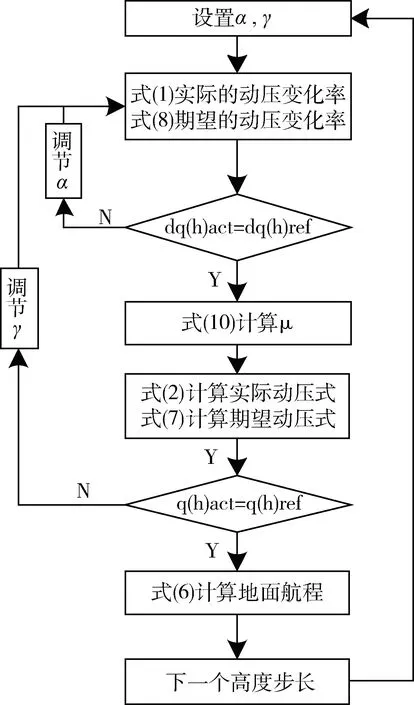
圖2 TAEM三維軌跡迭代算法
該算法可以保證終點處的高度、動壓、橫向位置和航跡方位角滿足指定的要求,但縱向位置有出現誤差的可能,因此,設計如圖3所示的縱向位置校正算法,通過調整R1,xHAC(定義如圖1所示)實現縱向位置的校正,同時通過轉彎模式的選擇實現RLV不同初始能量的要求,算法原理如下:
Step1: 設定R1,xHAC為最小值,并選擇跨越式飛行模式,利用算法1完成TAEM三維軌跡的設計,得到最終的縱向位置;
Step2: 判斷該位置是否超過終點位置xALI,若是,則選取跨越式飛行模式0,若否,則選取直接式飛行模式1;
Step3: 設定R1,xHAC的值,進行三維軌跡設計;
Step4: 判斷|xf-xALI|是否小于Δ=100ft,若是,則仿真結束,若否,則利用式(11)和(12)調整設置新的R1,xHAC,返回Step3。
HAC位置的校正采用如下線性規律:
xHAC(k+1)=xHAC(k)+bsgo
(11)
其中,sgo=xALI-xf表示縱向待飛距離;b為校正因子,在2種不同的模式下取不同的值。
HAC半徑R1的校正采用牛頓迭代法:
(12)
其中,文中的縱向位置校正策略是通過調整HAC的弧長達到調整sgo的目的。根據式(9)的HAC的弧長,計算上式中偏微分項?sgo/?R1=ΨHAC。
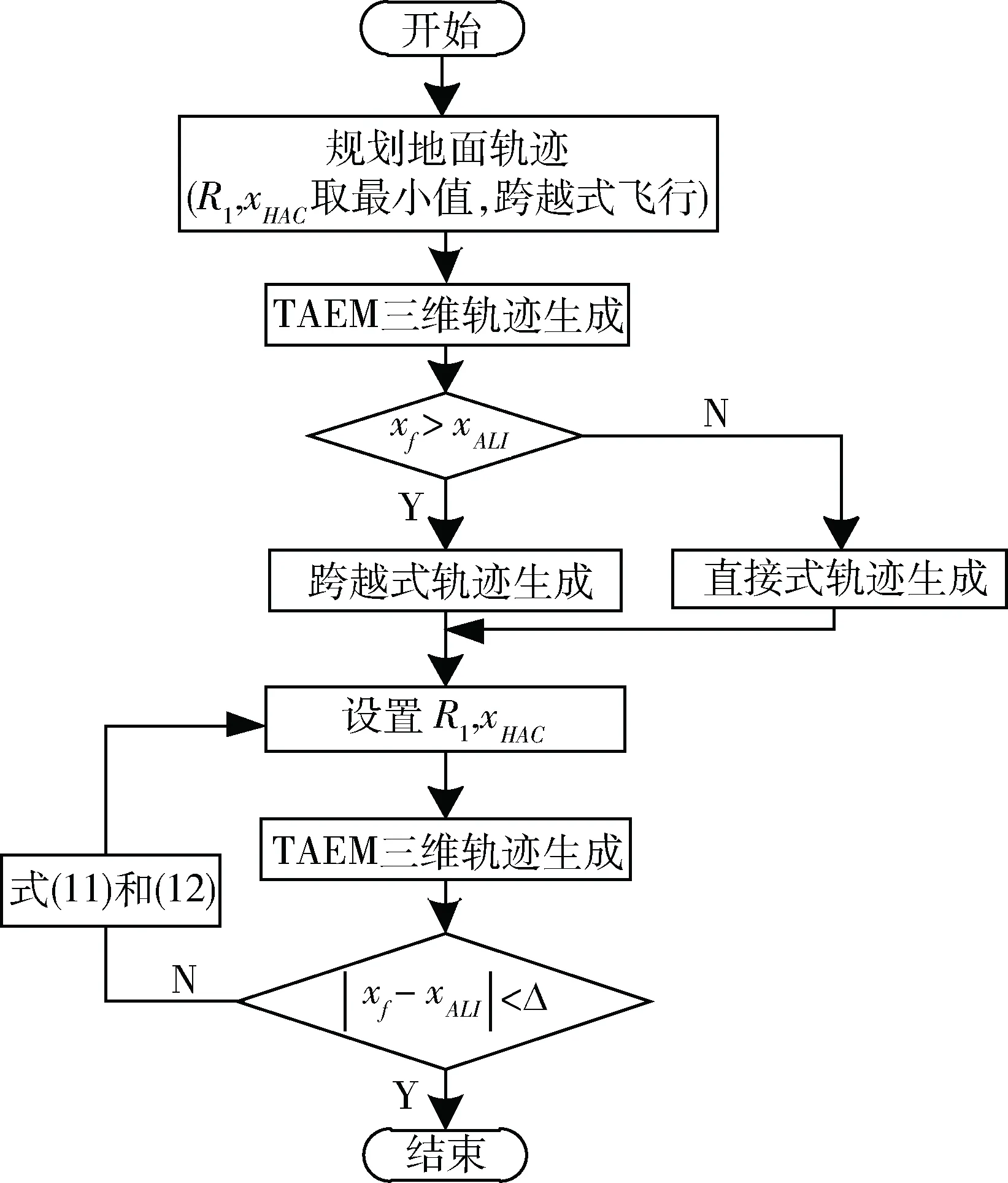
圖3 縱向位置校正算法
2 橫向魯棒制導律設計
當RLV進入到TAEM段時,通過在線軌跡規劃器,根據當前的能量狀態規劃合適的飛行軌跡,即確定HAC的位置、半徑大小以及轉彎模式。RLV在飛行過程中需完成對軌跡的跟蹤飛行。其中,各段的縱向采用迎角制導策略,可參見文獻[4]。本節主要研究RLV橫側向制導律的設計,HAC段為螺旋軌跡,RLV進行大范圍橫向機動,成為整個TAEM段制導的關鍵技術,預著陸段為TAEM的最后一段,考慮到HAC段的跟蹤誤差及切換延遲帶來的誤差,高精度的航向校正控制意味著TAEM的制導精度。
2.1 HAC段橫向制導律設計
如圖4所示,當RLV跟蹤HAC的圓弧時,在法向和側向分別對RLV進行受力分析,并根據牛頓第二定律有:

(13)

(14)
Lcosμ=mgcosγ
(15)
考慮到RLV轉彎角速率
(16)
定義VH=Vcosγ為RLV在水平方向的速度。因此,根據式(14)和(16),解得
上述過程完成了開環滾轉角指令的計算,從理論上來講,若RLV能夠以上式所示的滾轉角飛行,那么RLV將能較好的跟蹤理想的HAC軌跡,但是,實際飛行中,初始條件的不確定以及模型的假設及不確定性,均會導致僅依賴該制導指令達不到滿意的軌跡跟蹤效果。因此,引入閉環制導指令,實時校準RLV的航向誤差。與文獻[4]不同,本文從理論的角度對制導律進行設計。
首先,建立軌跡跟蹤的模型,如圖4所示,定義σ為航跡偏差角,η為RLV當前位置和HAC中心參考點連接成的直線與x軸之間的角度,R為HAC半徑,由圖4中的幾何關系,有:
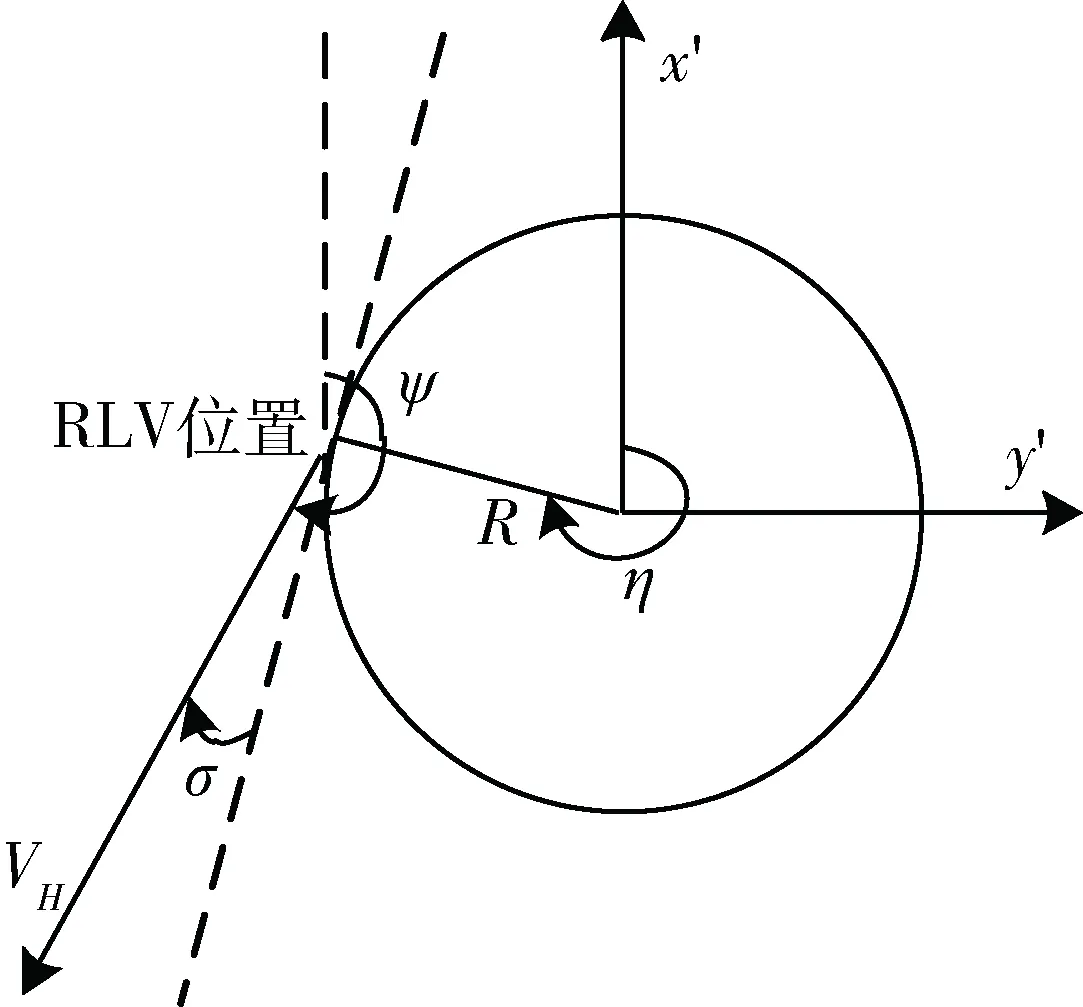
圖4 HAC軌跡跟蹤模型
η=ψ+(90°-σ)
(17)
(18)
(19)
由式(14)、(17)和(18)可得,
(20)
定義航向偏差角的擾動量、半徑的擾動量和滾轉角增量分別為:
δu=[μ-μ*]
δR=R-R*,δσ=σ-σ*
其中,μ*,R*和σ*為相應的期望值。
令系統狀態變量δz=[δRT,δσT]T,輸入為δu,對式(19)和(20)求偏導,并利用式(15)的關系,建立線性系統方程:

(21)
(22)
可見系統矩陣A,B在某一瞬態均為已知量或可測量得到。根據系統能控性秩判據,可知系統完全能控。此外,根據det(λI-A)=0,計算得到系統的特征根為:λ=±j(VH/R)。可見系統是二階零阻尼系統,需引入反饋項。令反饋制導項為:
δu=Kδz=kRδR+kσδσ
(23)
利用極點配置的原理,得到:
其中,ξ,ωn為阻尼比和自然頻率。

因此,HAC段的橫向閉環制導指令為:
總的橫向制導律為:
(24)
2.2 預著陸段橫向制導律設計
當ΨHAC≤5°時,制導系統即認為HAC段的飛行完成,隨即切換至預著陸段,理想情況下,此時的滾轉角μ應當為0,橫向位置為0,而實際中,由于HAC段終點處的位置誤差,以及切換延遲帶來的誤差,需要對滾轉角進行修正,以消除最終的橫向位置誤差。
選取橫向位置及其變化率為狀態變量,構建系統方程為:

設計制導律為:
與HAC段類似,此處不再展開。因此,預著陸段的橫向制導律為:
(25)
3 仿真驗證
本文建立的RLV模型具有與X-34飛行器[12]類似的結構,在MATLAB環境下對RLV末端能量管理段軌跡規劃算法及制導策略進行仿真分析,首先,在不同的初始條件下,生成期望的TAEM飛行軌跡,以驗證軌跡規劃算法的可行性及其對初始條件不確定性的自適應能力。然后,對HAC段及預著陸進行軌跡跟蹤分析,以驗證橫向制導律對HAC初始偏差情形下的適應能力。
由于初期再入段的控制誤差,導致TAEM段起點位置和航跡方位角存在不確定性,因此,論文設定了如表1所示的5種不同的仿真初始條件,分別進行仿真試驗,起點高度均為85000ft,動壓255psf,終點高度為10000ft,動壓為170psf。設定HAC半徑調節因子R2=305。
圖5給出了不同初始條件下的地面軌跡迭代曲線,可見該軌跡規劃算法可保證在不同的初始條件下,通過調整HAC的位置和大小及轉彎模式,可規劃出合適的參考軌跡,算法可行。
為了驗證HAC段和預著陸段的橫向制導律,選取HAC起始點為仿真開始點,此時高度為38000ft,
馬赫數0.8,處于亞聲速飛行階段。給定HAC段的初始位置誤差為1000ft,選取ξ=0.7,ωn=0.5rad/s,ξp=0.9,ωnp=0.5rad/s。圖6給出了地面軌跡的跟蹤曲線,可見在制導律式(24)和(25)的作用下,可以保證TAEM末端制導的精度。圖7給出該范圍內的迎角和滾轉角隨高度變化的曲線圖,迎角除了在HAC開始處出現瞬態響應,其余均較為平緩,滾轉角在HAC段逐漸減小,在預著陸段近似為0,最終保證了橫向位置誤差接近為0。
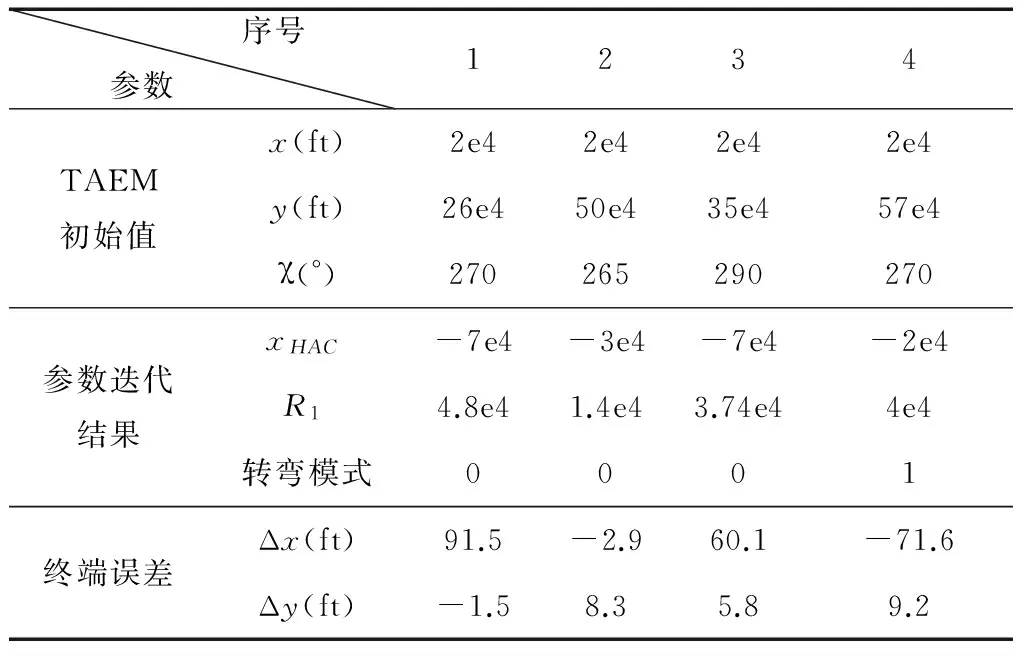
表1 不同初始條件下的軌跡生成結果
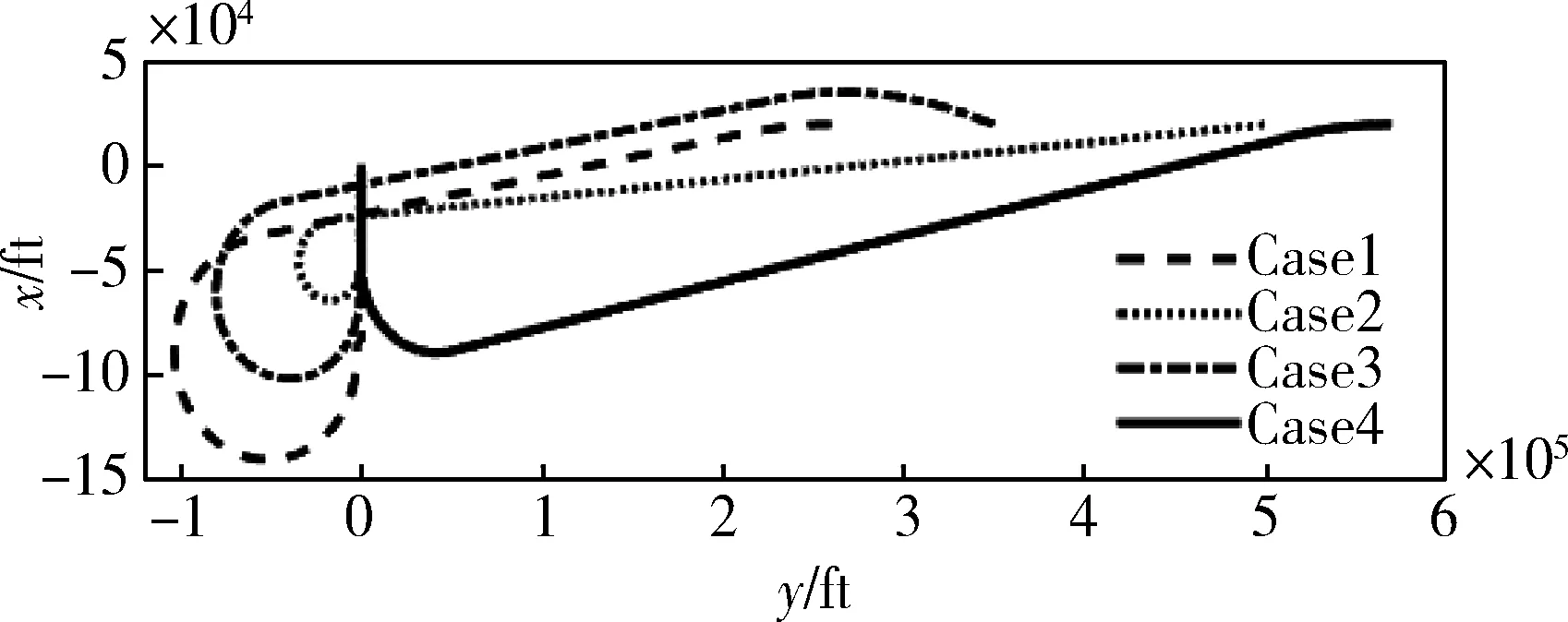
圖5 不同初始條件下生成的地面軌跡
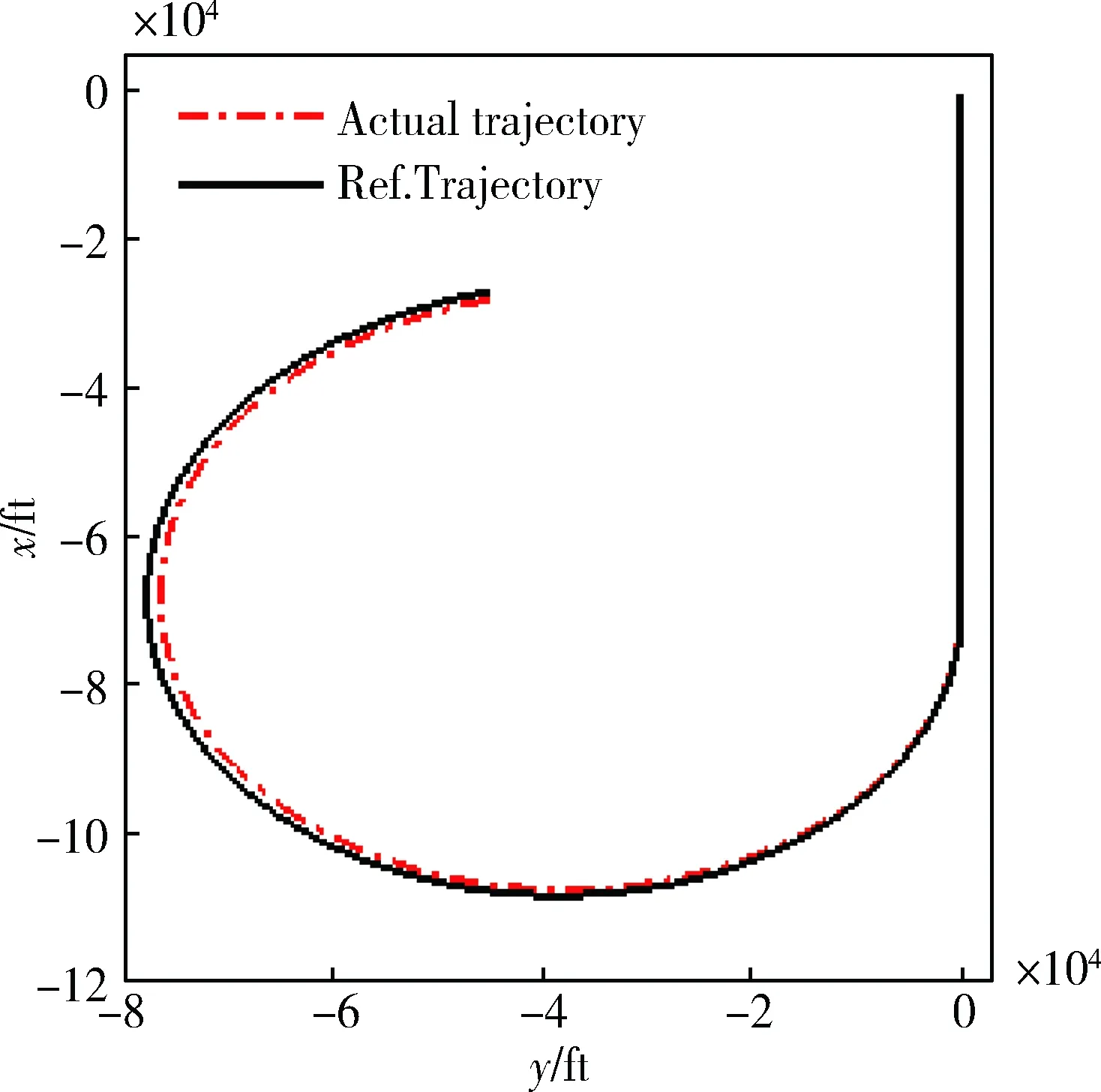
圖6 地面軌跡跟蹤結果
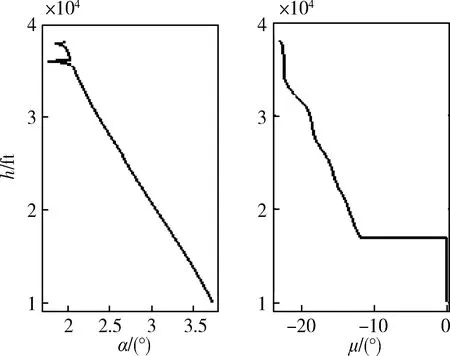
圖7 系統輸入曲線
4 結論
考慮到RLV在TAEM段的實際飛行特點,本文提出的軌跡規劃算法從建立以高度為自變量、動壓為狀態變量的KEP運動方程著手,根據動壓剖面和地面軌跡,迭代生成三維軌跡。利用縱向位置校正算法,保證在不同初始位置下能夠生成合理的TAEM軌跡。考慮到橫向跟蹤可能出現的誤差,設計了HAC段和預著陸段的橫向制導律,保證了末端制導精度。
[1] 包為民. 航天飛行器控制技術研究現狀與發展趨勢 [J]. 自動化學報, 2013, 39(6): 697-702. (Bao Weimin. Present Situation and Development Tendency of Aerospace Control Techniques [J]. Acta Automatica Sinica, 2013, 39(6): 697-702.)
[2] Moore T E. Space Shuttle Entry Terminal Area Energy Management [R]. NASA Johnson Space Center, Technical Memorandum1047744, 1991.
[3] 孫春貞, 黃一敏, 郭鎖鳳. 重復使用運載器末端能量管理段軌跡線設計[J].系統工程與電子技術, 2007,29(6): 909-914.(Sun Chunzhen, Huang Yimin, Guo Suofeng. Trajectory Design for Terminal Area Energy Management of Reusable Launch Vehicle [J]. Systems Engineering and Electronics, 2007,29(6): 909-914.)
[4] Kluever C A. Terminal Guidance for an Unpowered Reusable Launch Vehicle with Bank Constraints [J]. Journal of Guidance, Control, and Dynamics, 2007, 30(1): 162-168.
[5] 陳功, 解志軍, 崔乃剛. 升力式再入飛行器末端能量管理方法[J]. 哈爾濱工業大學學報, 2012, 44(9):
20-24.(Chen Gong, Xie Zhijun, Cui Naigang. The Method of Terminal Area Energy Management for Lifting Reentry Vehicle [J]. Journal of Harbin Institute of Technology, 2012, 44(9): 20-24.)
[6] 周敏, 周軍, 郭建國. RLV 末端能量管理段軌跡在線規劃與制導[J]. 宇航學報, 2015, 36(2): 151-157. (Zhou Min, Zhou Jun, Guo Jianguo. On-Line Trajectory Planning and Guidance for Terminal Area Energy Management of Reusable Launch Vehicle[J]. Journal of Astronautics, 2015, 36(2): 151-157.)
[7] Barton G H, Grubler A C, Dyckman T R. New Methodologies for Onboard Generation of TAEM Trajectories for Autonomous RLVs [C]. Proceedings of the 2002 Core Technologies for Space Systems Conference.
[8] Grubler A C. New Methodologies for Onboard Generation of Terminal Area Energy Management Trajectories for Autonomous Reusable Launch Vehicles[D]. Cambridge: Massachusetts Institute of Technology, 2001.
[9] 張軍, 黃一敏, 楊一棟. RLV末端能量管理段三維制導軌跡推演研究[J]. 系統工程與電子技術, 2010, 32(8): 1727-1731.(Zhang Jun, Huang Yimin, Yang Yidong. Research on 3-D Guidance Trajectory Propagation of Terminal Area Energy Management for RLVs [J]. Systems Engineering and Electronics, 2010, 32(8): 1727-1731.)
[10] 沈宏良, 龔正. 航天飛機末端能量管理段在線軌跡設計方法 [J]. 宇航學報, 2008, 29(2): 430-433. (Shen Hongliang, Gong Zheng. Methodology of Onboard Trajectory Design for Space Shuttle Terminal Area Energy Management Phase [J]. Journal of Astronautics, 2008, 29(2): 430-433.)
[11] 唐鵬, 張曙光. 末端能量管理段軌跡生成改進算法[J]. 宇航學報, 2009, 30(4): 1340-1345. (Tang Peng, Zhang Shuguang. Improved Trajectory Generation Algorithm for Terminal Area Energy Management Phase[J]. Journal of Astronautics, 2009, 30(4): 1340-1345.)
[12] Bandu N P, Brauckmann G J. Aerodynamic Characteristics, Database Development, and Flight Simulation of the X-34 Vehicle [J]. Journal of Spacecraft and Rockets, 2001, 38(3):334-344.
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
公民與法治(2020年11期)2020-07-25 02:02:06
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41