基于PCA算法的機載LiDAR點云平面分割算法研究
2018-03-15 03:29:33葉玲潔顏遠青
城市勘測 2018年1期
關(guān)鍵詞:區(qū)域
葉玲潔,顏遠青
(1.廣州市城市規(guī)劃勘測設(shè)計研究院,廣東 廣州 510060; 2.珠海大橫琴科技發(fā)展有限公司,廣東 珠海 519000)
1 引 言
在建筑物的三維重建中,屋頂面提取是其中最關(guān)鍵的部分[1],后續(xù)工作都在屋頂面準確提取的基礎(chǔ)上進行。按照屋頂面的平整度,可以將屋頂面分為平面式屋頂和曲面式屋頂,現(xiàn)代建筑中尤其是城市建筑物,一般都較為規(guī)則,屋頂面多為平面式,而對于曲面式屋頂,難以直接用參數(shù)定義其曲面形狀,常規(guī)的做法是對其構(gòu)建Delaunay三角網(wǎng),以三角面片的形式來擬合曲面。本文的研究重點主要是針對平面式屋頂面,因此對曲面式的屋頂面不進行研究討論。
在屋頂面分割算法中,目前常用的主要是RANSAC(Random Sample Consensus,隨機抽樣一致性)算法[2]、區(qū)域增長算法[3]、三維霍夫變換算法[4]、聚類算法等。區(qū)域增長算法首先選定一個種子區(qū)域,根據(jù)屋頂面點云與種子區(qū)域的法向量夾角、空間位置關(guān)系不斷地拓展面片,該方法分割效果良好,但是算法中參數(shù)選取較為困難,同時由于法向量的計算易受噪聲點影響,進而使得算法增長出錯誤的平面。RANSAC是一種隨機參數(shù)估計算法,首先從點云中隨機選取三個點,計算出平面參數(shù),然后計算其他點與該平面的偏差,當偏差小于閾值,則該點為局內(nèi)點,不斷迭代找到局內(nèi)點最多的平面,則為最優(yōu)平面模型。RANSAC能魯棒的估計模型參數(shù),但是其迭代次數(shù)必須足夠多才能得到準確的結(jié)果,效率低下。
在進行平面擬合時,常用的方法是最小二乘法進行平面擬合,但最小二乘法對于自變量與因變量無法區(qū)分的情況,適應(yīng)性差[5],在實際中,一般認為接近垂直于地面的屋頂面是不存在的,以Z坐標作為因變量來對屋頂面進行最小二乘擬合平面。同時,在屋頂面點云存在噪聲點的情況下,對擬合結(jié)果影響很大。
本文利用PCA(Principal Component Analysis,主成分分析法)來計算點云的法向量,并以區(qū)域增長法來對平面進行分割。PCA算法可以有效減小噪聲點對法向量計算的影響,改善區(qū)域增長的結(jié)果。
2 平面擬合
本文中采用PCA的方法對點云進行平面擬合。PCA是一種數(shù)學(xué)變換的方法,利用降維的思想在變換中保持變量的總方差不變,將給定的一組變量線性變換為另一組不相關(guān)的變量,并且使變換后的第一變量的方差最大,即第一主成分,其他分量的方差依次遞減[6]。在本文中的變量為三維點坐標的集合,其變量為X、Y、Z三個坐標值,則經(jīng)過變換后,應(yīng)有三個主成分,對于一個空間平面,在平行于平面的方向上點集分布最為離散,方差最大,在垂直于平面的方向上,點集分布最為集中,方差最小,即空間平面的第三主成分為垂直于空間平面的向量。由于平面擬合最關(guān)鍵的為法向量的擬合,利用PCA得到點集的第三主成分,即能進一步擬合出平面方程,如圖1所示。

圖1 PCA變換原理
對于在坐標系XYZ下的待擬合平面點云,利用主成分分析法對其進行分析,可得到三個按照從大到小排列的特征值λ1、λ2、λ3,對應(yīng)的主分量分別為V1、V2、V3,其中V1和V2組成了待擬合平面的一組基,V3與V1、V2正交,為垂直于待擬合平面的法向量。如圖1,在XYZ坐標系下的點云,經(jīng)過主成分分析后,三個主成分分量V1、V2、V3組成了新坐標系X′Y′Z′的三個基,V1和V2為平面X′O′Z′的一組基,V3為O′Z′方向的基,即所擬合平面的法向量。
PCA過程如下:
(1)特征中心化。即每一維的數(shù)據(jù)都減去該維的均值,變換之后每一維的均值都變成了零。特征中心化后的點集P,如式(1),其中,xi、yi、zi為中心化后點坐標:
(1)
(2)計算三個坐標的協(xié)方差矩陣。協(xié)方差矩陣C為:

(2)
其中,cov(x,y)為x坐標和y坐標的協(xié)方差,cov(x,x)為x坐標的方差,協(xié)方差計算公式如式(3),xi、yi為中心化后點坐標:
(3)
當協(xié)方差大于零時說明x和y是正相關(guān)關(guān)系,協(xié)方差小于零時x和y是負相關(guān)關(guān)系,協(xié)方差為零時x和y相互獨立。
(3)計算協(xié)方差矩陣C的特征值和特征向量。所計算出來的特征值按照從大到小排序,分別為λ1、λ2、λ3,其所對應(yīng)的特征向量分別為ξ1、ξ2、ξ3。顯然,兩個較大λ所對應(yīng)的特征向量ξ1、ξ2為待擬合平面的一組基,而ξ3為待擬合平面的法向量,其三個分量分別為a、b、c。
若已知待擬合平面經(jīng)過點p(x0,y0,z0)p(x0,y0,z0),則擬合平面為式(4):
a(x-x0)+b(y-y0)+c(z-z0)=0
(4)
采用主成分分析法擬合平面的方法,對于存在噪聲點的情況,也能很好的擬合出結(jié)果。因為在一個平面點云中,噪聲點偏離平面的距離相對于平面的范圍較小,對擬合結(jié)果的影響可以忽略。
3 法向量計算
傳統(tǒng)的平面分割算法中,對于點的法向量計算通常是采用以點為圓心,r為半徑的一個鄰域,取鄰域內(nèi)的所有點云進行最小二乘擬合,這種方法在平滑變化的曲面上,計算的結(jié)果不會有太大偏差,但是在邊緣處,法向量難以確定,其結(jié)果是不準確的[7]。
本文中,首先對點的法向量進行計算。在選擇點云的鄰域點時,把當前表面情況考慮進去,即對于在同一個平面上,且空間上相鄰近,則認為是鄰域點,若不在同一個平面上,即使空間上相鄰近,也不視為鄰域點[8]。

圖2 初始鄰域點的選擇
法向量計算的主要步驟如下:
(1)定義所求點的r鄰域,搜索到其所有鄰域點,并進行平面擬合,擬合結(jié)果為Φinit。其中,如圖2,初始的鄰域點為在以所求點為球心,r為半徑的區(qū)域內(nèi)的所有點,都認為是所求點的鄰域點;
(2)計算鄰域點到Φinit的距離di的中誤差σ,將距離di小于兩倍中誤差的點權(quán)值設(shè)為1,距離di大于兩倍中誤差的點權(quán)值設(shè)為0。重新擬合平面Φinit;權(quán)值計算公式如(5):
(5)
(3)多次擬合,直到所擬合的平面參數(shù)不再改變或者改變量小于閾值,此時擬合的平面為Φi。則Φi的法向量為所求點的法向量。
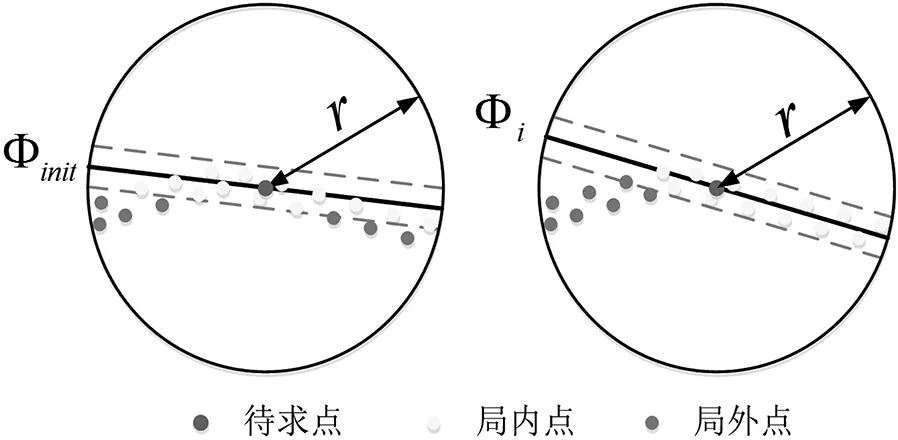
圖3 法向量求解過程
法向量的求解過程,也就是所求點處平面的擬合過程,可以用圖3表示,初始擬合的平面采用了r鄰域內(nèi)的所有點云進行擬合,其結(jié)果為Φinit,鄰域內(nèi)與Φinit的距離小于2σ的權(quán)值為1,如圖中黃色點,將權(quán)值為1的點重新擬合,多次擬合,最終結(jié)果為Φi,從圖3中可看出,此時所采用的用來擬合Φi的鄰域點為待求點的r鄰域內(nèi),且在同一個平面內(nèi)的點。如圖4,將以待求點為球心,r為半徑的區(qū)域內(nèi),與待求點在同一個平面內(nèi)的點,作為待求點的鄰域點,以最終確定的鄰域點來計算所求點的法向量。

圖4 最后鄰域點的確定
4 平面分割
本文中平面分割的主要算法為區(qū)域增長,主要步驟如下[9]:
(1)生成分割結(jié)果列表L,種子點隊列S,當前區(qū)域點列表Q;
(2)計算所有點的法向量和曲率。點pi對應(yīng)的法向量、曲率分別為ni、ci;
(3)選擇曲率最小且未聚類點作為種子點,將其添加到種子點隊列S和當前平面點列表Q中;
④若種子點隊列S為空時,當前平面提取完成,將當前平面點列表Q保存到分割結(jié)果列表L中;重置Q。
(5)最后的分割結(jié)果保存在列表L中。
在將點云數(shù)據(jù)進行平面分割后,同一個平面上的點云將被劃分到同一個聚類中。此時,對其進行平面擬合,計算出平面參數(shù)。做法是采用PCA算法計算得到平面的法向量,即平面參數(shù)a、b、c,將點集內(nèi)所有點求其中心,以其中心作為平面上點,計算出平面參數(shù)d。
5 實驗與分析

圖5 人字形屋頂面的區(qū)域增長算法分割結(jié)果
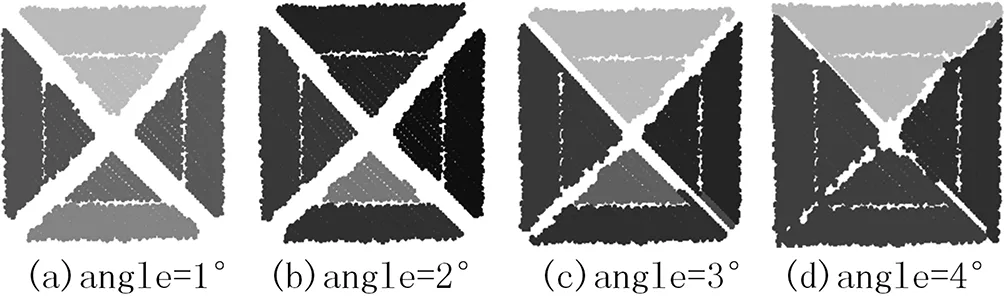
圖6 錐形屋頂面的區(qū)域增長算法分割結(jié)果
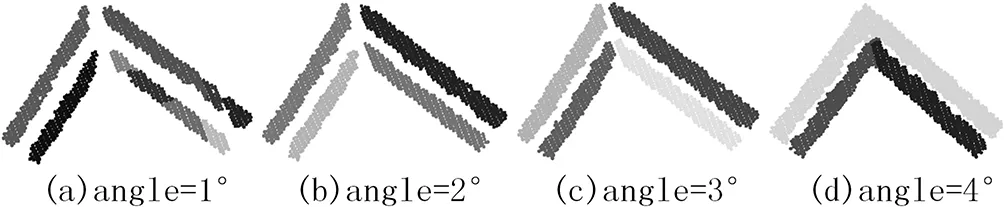
圖7 L形屋頂面的區(qū)域增長算法分割結(jié)果
圖5、圖6、圖7,為三組不同數(shù)據(jù),采用傳統(tǒng)的區(qū)域增長對數(shù)據(jù)進行平面分割的結(jié)果,其中,angle為角度閾值,可以看出,在平面上無噪聲或者噪聲較少的情況下,區(qū)域增長算法提取出來的平面內(nèi)部點較為連續(xù),不會出現(xiàn)空洞,但在邊緣處的點云無法很好地分割開。這是因為邊緣處的點云法向量計算困難,無法得到其正確的法向量,因此邊緣處的點云分割較為零碎,而本文中設(shè)定,當點數(shù)少于閾值時,不判別為一個平面,即一個平面上,必須有足夠多的點,才能被識別出。本文設(shè)置閾值為20個點。同時,區(qū)域增長的參數(shù)不容易設(shè)置,對于不同形狀的點云需要不同的參數(shù),使得建筑物平面點云自動化分割難以實現(xiàn),制約了建筑物自動化三維重建的可能。
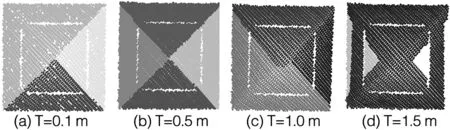
圖8 錐形屋頂面的RANSAC算法分割結(jié)果
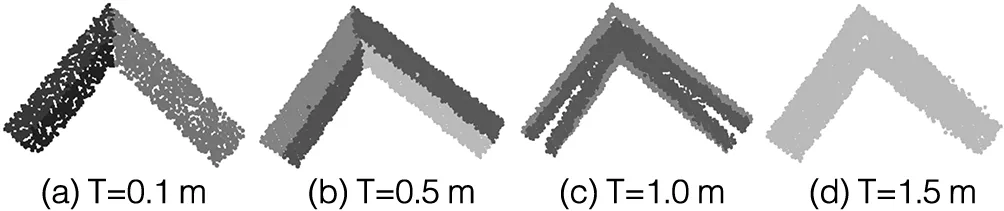
圖9 L形屋頂面的RANSAC算法分割結(jié)果
圖8、圖9,為兩組數(shù)據(jù),采用了RANSAC算法對數(shù)據(jù)進行平面分割的結(jié)果,其中,T為閾值。可以看出,RANSAC在參數(shù)合適的時候能夠較好地分割出平面。但是,RANSAC提取出的每個平面并不是等價的,第一個被提取出的平面總是會擁有更多的點,這一點在圖8的T=1.0 m時表現(xiàn)比較明顯。此外,參數(shù)不合適時,出現(xiàn)各種錯誤情況,如T=0.1 m時,平面中出現(xiàn)很多空洞,這是由于機載LiDAR掃描的點云在高程方向有一定的波動,但被RANSAC錯誤地濾掉;在第一組T=1.5 m和第二組T=1.0 m時,則出現(xiàn)全局最優(yōu),RANSAC只把全局內(nèi),分配到當前平面點數(shù)最多的判別為平面。
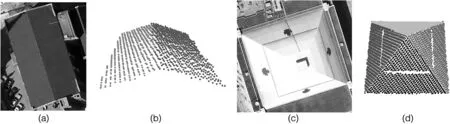
圖10本文算法結(jié)果與影像對比
圖10為本文算法分割結(jié)果與實際影像對比,可以看出分割的結(jié)果較為準確,在平面相交的邊緣處也沒有因為點云法向的不確定性而導(dǎo)致的錯誤分割或者邊緣缺失的情況。
而對于圖11類型的穹頂建筑,本文算法無法適應(yīng)。

圖11 穹頂屋頂建筑
6 結(jié) 語
本文簡單介紹了常用的平面分割算法,包括三維霍夫變換、RANSAC算法和區(qū)域增長算法。三維霍夫變換需要將點云變換到屬性空間,計算量較大,一般較少使用;RANSAC算法需多次迭代,效率低下,在參數(shù)不合適的時候,也容易出現(xiàn)全局最優(yōu)而導(dǎo)致分割錯誤,此外,若第一個提取的平面擁有更多的點也導(dǎo)致后續(xù)提取的平面質(zhì)量不斷下降;區(qū)域增長算法對邊緣處的法向量計算比較困難,隨之出現(xiàn)的是邊緣處的點云無法很好地分割到平面上。
本文采用PCA算法擬合局部平面的方法,并根據(jù)點到平面的距離設(shè)置權(quán)值,迭代多次后得到最準確的平面及其所對應(yīng)的法向量,由于所選擇的鄰域一般較小,所迭代次數(shù)相對于RANSAC算法大大減少。但在屋頂面點云數(shù)量較少的情況下,噪聲點對屋頂面法向量計算影響變大,容易導(dǎo)致法向量計算出錯,從而使得分割結(jié)果錯誤。計算出法向量后,再以區(qū)域增長算法來對點云數(shù)據(jù)進行分割,經(jīng)過實驗,其結(jié)果準確,分割效果良好。根據(jù)本文算法進行點云平面分割,其結(jié)果可應(yīng)用于建筑物的建模、點云分類等。本文算法主要針對平面點云的分割,對于平頂、坡頂甚至多平面復(fù)合型建筑物屋頂點云分割效果較好,但對于穹頂、曲面建筑物屋頂點云無法適用,筆者將繼續(xù)深入研究并加以改進。
[1] 胡偉,盧小平,李珵等. 基于改進RANSAC算法的屋頂激光點云面片分割方法[J]. 測繪通報,2012(11):31~34.
[2] 李娜,馬一薇,楊洋等. 利用RANSAC算法對建筑物立面進行點云分割[J]. 測繪科學(xué),2011,36(5):144~145.
[3] 李寶順,岑紅燕,包亞萍等. 基于平面提取的點云數(shù)據(jù)分割算法[J]. 計算機應(yīng)用與軟件,2014,31(7):145~148.
[4] 黃先鋒. 利用機載LIDAR數(shù)據(jù)重建3D建筑物模型的關(guān)鍵技術(shù)研究[D]. 武漢:武漢大學(xué),2006.
[5] 浮丹丹,周紹光,徐洋等. 基于主成分分析的點云平面擬合技術(shù)研究[J]. 測繪工程,2014,23(4):20~23.
[6] 王松,夏紹瑋. 一種魯棒主成分分析(PCA)算法[J]. 系統(tǒng)工程理論與實踐,1998(1):10~14.
[7] 楊斌. 機載LiDAR點元數(shù)據(jù)建筑物半自動提取方法研究[D]. 阜新:遼寧工程技術(shù)大學(xué),2012.
[8] Kim C,Habib A,Pyeon M,et al. Segmentation of Planar Surfaces from Laser Scanning Data Using the Magnitude of Normal Position Vector for Adaptive Neighborhoods[J]. Sensors,2016,16(2):140.
[9] 楊洋,張永生,張皓等. 基于LiDAR數(shù)據(jù)的建筑物自動化重建[J]. 測繪科學(xué)技術(shù)學(xué)報,2010,27(2):123~126.
[10] 姜如波. 基于三維激光掃描技術(shù)的建筑物模型重建[J]. 城市勘測,2013,3:113~116.
猜你喜歡
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
科學(xué)(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學(xué)輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農(nóng)墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
新疆財經(jīng)大學(xué)學(xué)報(2015年3期)2015-12-10 03:49:15