內嵌加速度計的智能輪胎縱/垂向力估計算法?
2018-03-15 10:55:54路妍暉劉勝利
汽車工程 2018年2期
趙 健,路妍暉,朱 冰,劉勝利
前言
輪胎是汽車與地面接觸的唯一部件,輪胎與路面接觸過程中的相互作用力對車輛有重大影響,是汽車安全性、操縱穩定性、燃油經濟性和乘坐舒適性等性能的重要保證。實時獲取輪胎力信息對汽車動力學控制有重要意義,輪胎力實時測量與估算的研究一直倍受關注。但輪胎力不易直接獲取,在許多研究中大多通過車輛動力學模型推導或估算得到輪胎力[1-2],例如,文獻[3]中提出了一種利用車載傳感器直接測量的車輛狀態參數結合車輛7自由度模型,采用RKF算法估計輪胎側向力的方法。近年來,傳感器技術與電子技術的發展使在輪胎中加裝傳感器,直接測量輪胎力成為可能。
智能輪胎是集成了傳感技術、信號調理技術和實時通信技術等先進技術的輪胎,它能自動檢測當前輪胎的工作狀況,自動監測胎壓、胎溫、輪胎與路面間的附著特性和輪胎與路面間的輪胎力等信息,并將上述各種信息實時傳遞給車輛的底盤控制系統[4]。智能輪胎通過安裝在胎內的各種傳感器,獲取輪胎的作用力信息[5-7]。在智能輪胎的諸多傳感器方案中,采用三軸微機電系統(micro-electro-mechanical system,MEMS)加速度傳感器的方案受到較多的關注,它通過在胎冠內表面安裝MEMS傳感器,實時測量輪胎轉動時,特別是傳感器通過接地印跡時胎冠內表面的振動加速度,實時測量和估算輪胎路面相互作用力。MEMS傳感器體積小,質量輕,易于實現在輪胎內的安裝。文獻[8]中使用三軸加速度計的信號結合滑移率對地形進行分類與識別,文獻[9]中通過加速度信號檢測輪胎與路面接觸部分的滑動情況。
本文中設計了一種在胎冠內側粘貼三軸MEMS加速度傳感器的智能輪胎測試系統,并搭建了實車試驗平臺,在典型工況下進行了智能輪胎的實車試驗;據此對汽車行駛時輪胎接地印記處胎冠內壁周向與法向加速度信號的響應機理進行分析,提取了智能輪胎周向與法向加速度信號的典型特征;在此基礎上,將智能輪胎加速度信號的特征結合輪速、車速等影響因素,采用BP神經網絡方法設計了智能輪胎縱向力與垂向力估計算法。
1 智能輪胎系統設計
1.1 智能輪胎系統工作原理簡述
本文中采用在輪胎胎冠內壁粘貼三軸加速度計的智能輪胎方案。汽車行駛時,胎冠內表面的加速度信號不斷變化,特別是當傳感器所處位置通過接地印跡時,輪胎接地印記處的加速度信號會產生與輪胎力狀態高度相關的響應。因此,采集輪胎胎冠表面的加速度信號,并分析輪胎接地印跡處加速度響應的典型特征與輪胎力的對應關系,在此基礎上設計估算算法,即可實現輪胎力的估計。
1.2 智能輪胎測試系統硬件方案
智能輪胎測試系統總體架構如圖1所示。為進行智能輪胎加速度信號機理分析與算法開發,除可以采集胎冠內表面加速度矢量信號的智能輪胎系統外,還加裝了車輛狀態信息采集系統和輪胎力采集系統。
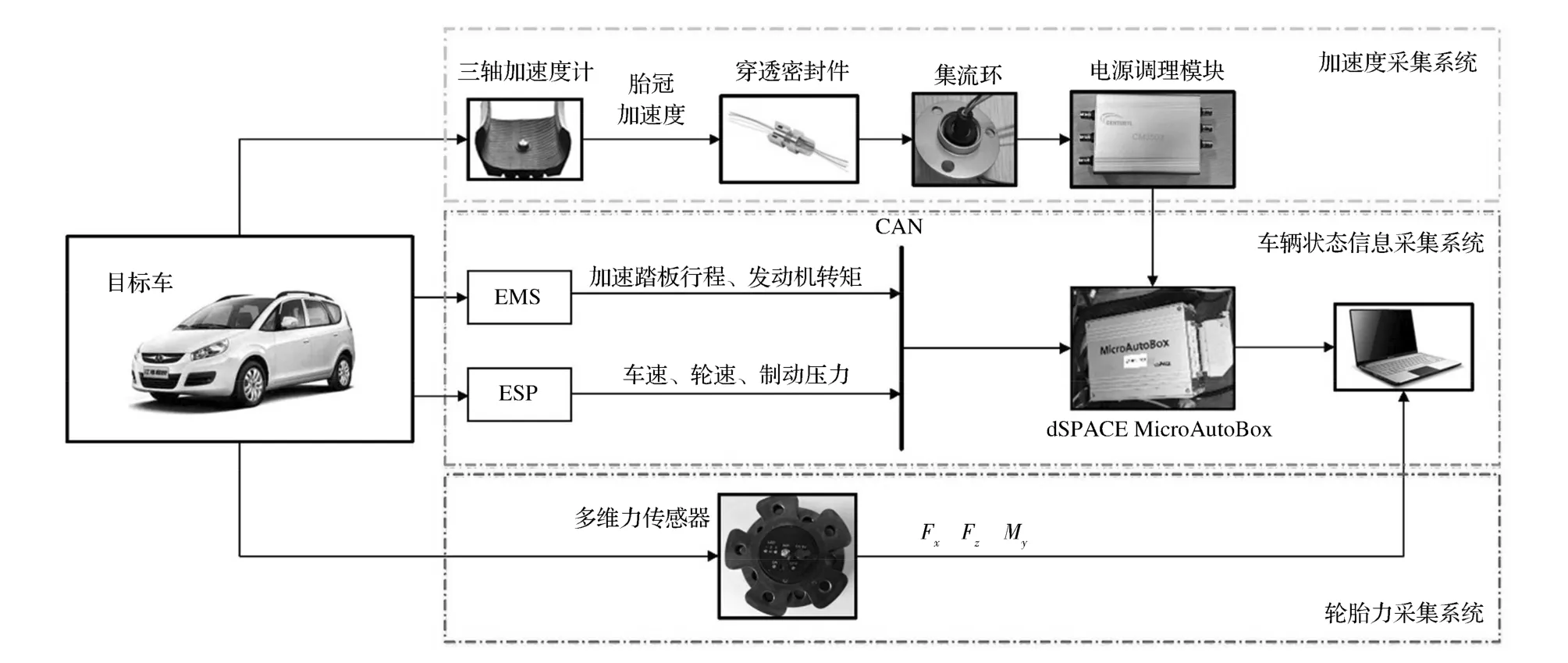
圖1 智能輪胎測試系統設計及研究方案
(1)智能輪胎加速度采集系統
輪胎振動加速度信號由粘貼于胎冠內表面的加速度傳感器采集,經穿透密封裝置、集流環和恒流源模塊輸出模擬信號,由dSPACE公司的MicroAuto-Box采集。
加速度傳感器采用美國DYTRAN公司生產的3313A2型微型三軸集成壓電(integral electronic piezoelectric,IEPE)型加速計。這種傳感器尺寸只有6.1mm×6.1mm×6.1mm,非常便于在輪胎內的安裝;其量程高達±2 500g,符合智能輪胎的要求。通過強力膠固定安裝在輪胎胎冠內側中央。加速度計及其在輪胎內的安裝實物圖如圖2所示。
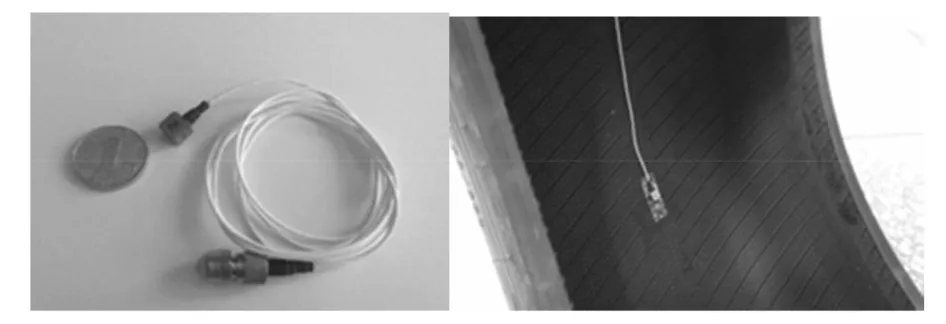
圖2 三軸加速度計及其內表面的安裝
穿透密封裝置在保證輪胎的密封的前提下,引出加速度傳感器接線,實現傳感器供電及信號傳輸;集流環用于旋轉輪胎的接線;恒流源模塊用于IEPE型傳感器信號的供電與信號調理,如圖3所示。經恒流源模塊調理后的加速度信號由MicroAutoBox系統實時采集。
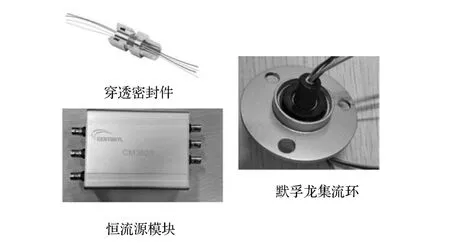
圖3 加速度采集系統附件
(2)車輛狀態信息采集系統
智能輪胎振動加速度與輪胎力的對應關系受到輪速等車輛狀態信息的影響。車輛發動機管理系統(engine management system,EMS)的加速踏板行程、發動機轉矩信號和電子穩定性程序(electronic stability program,ESP)的輪速、制動主缸壓力信號發送到車輛動力CAN,由MicroAutoBox采集,用于分析多種因素對智能輪胎加速度信號的影響。其中加速踏板、發動機轉矩和制動主缸壓力信號用于確定試驗工況。
(3)多維輪胎力傳感器
為分析輪胎接地印跡處加速度信號特征與輪胎力的對應關系,本文中采用合肥旭寧科技有限公司生產的BIOFORCEN多維力傳感器同步測量輪胎力。傳感器實物如圖4所示,可實現輪胎的縱向力Fx、垂向力Fz和旋轉力矩My的直接測量。
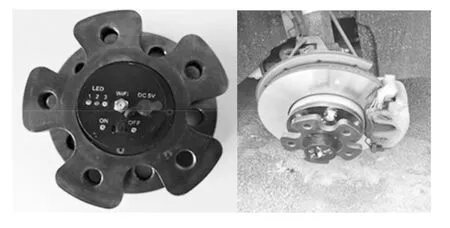
圖4 多維力傳感器
2 實車試驗
2.1 實車測試系統

圖5 智能輪胎裝車及測試系統
實車試驗在某A級轎車上進行,它裝用205/55 R16輪胎,胎壓0.22MPa。智能輪胎測試系統裝車如圖5所示。由于本文中采用的多維力傳感器無法實現輪胎側向力的實時采集,雖然所采用的三軸加速度傳感器可測量輪胎側向加速度,但本文中并未完成側向力估計的研究,因此只進行了直行工況試驗。選取的試驗場地為水平的干燥瀝青路面,路面附著系數在0.8左右,試驗工況為:(1)勻速直線行駛,速度15,25,35km/h等;(2)直線加速工況,速度 0-40km/h,加速過程中保持節氣門開度不變,中低強度加速;(3)直線制動工況,速度40-0km/h,中低強度制動,持續制動過程中制動踏板位置保持不變。
2.2 試驗采集結果
試驗過程中,每組均進行多次測試。圖6~圖8分別為勻速直行(15km/h)、加速、減速工況下的測試結果示例。
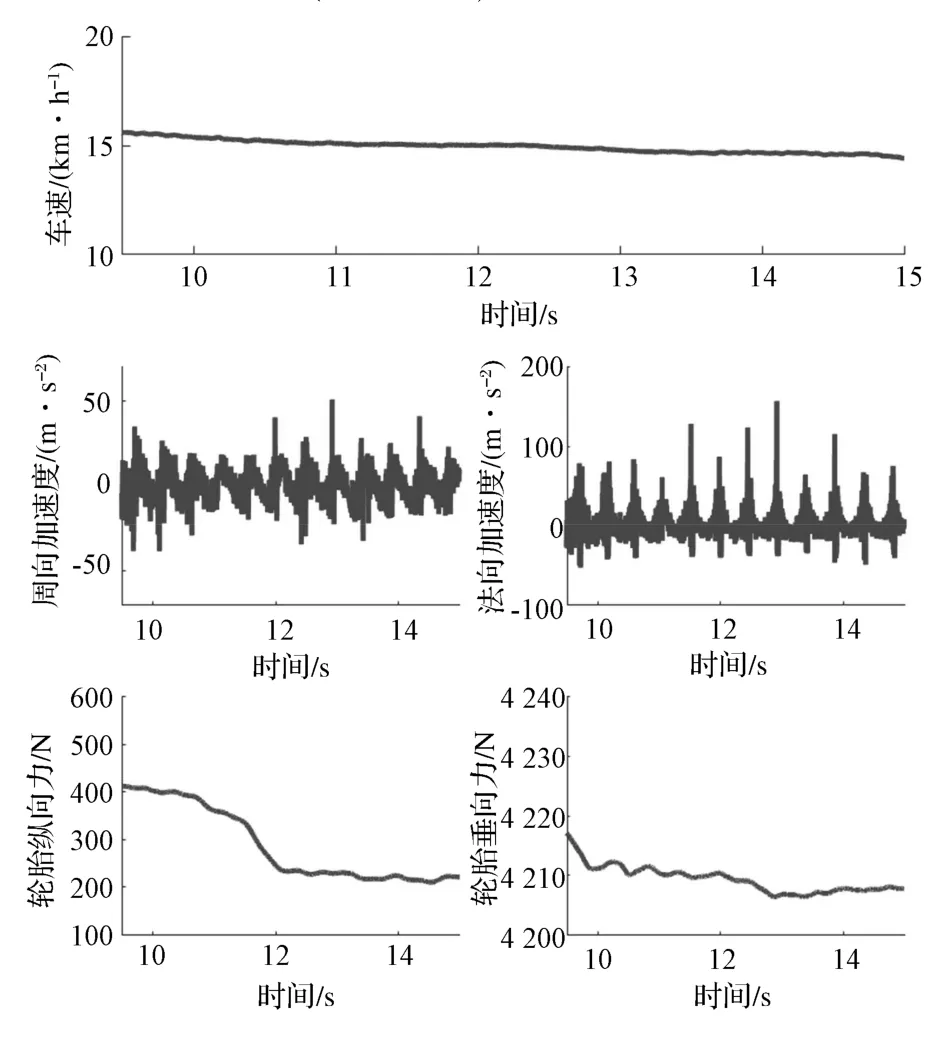
圖6 勻速工況數據采集結果曲線
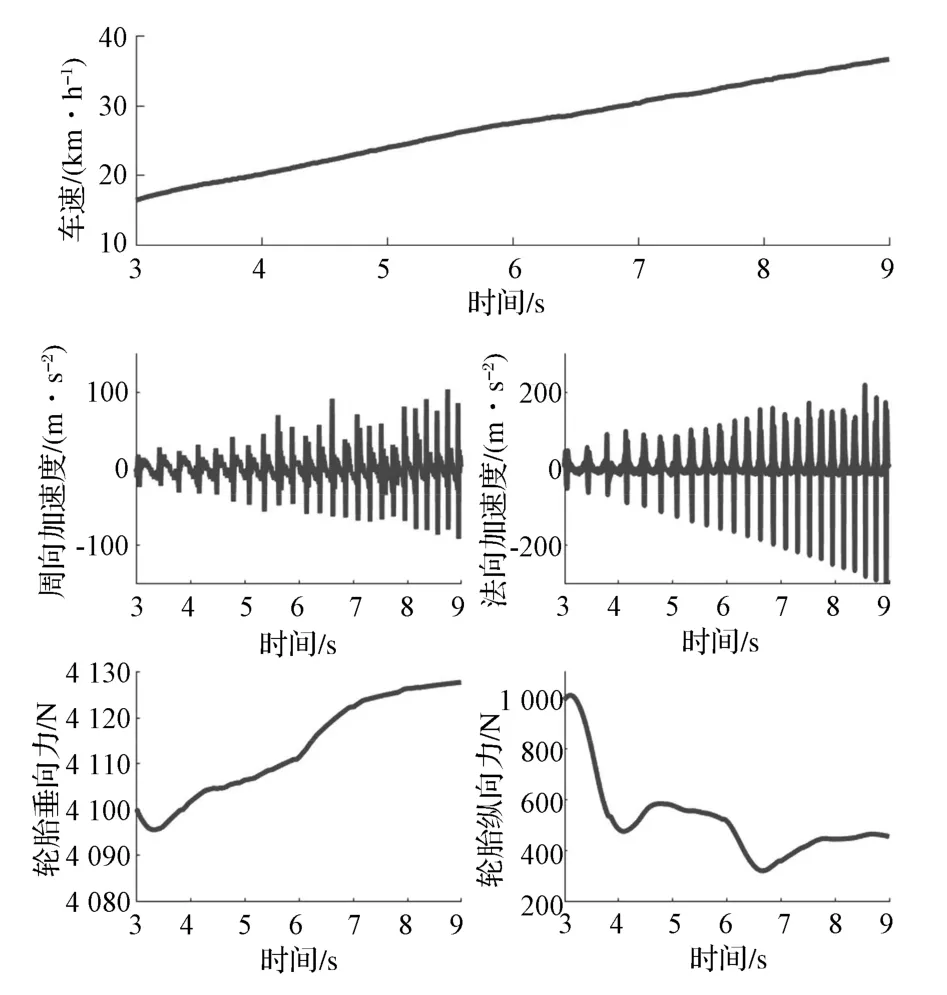
圖7 加速工況數據采集結果曲線

圖8 制動工況數據采集曲線
由圖可見,當加速度計所在位置通過接地印跡時,加速度信號會有明顯的響應。車輛直線行駛時,勻速工況下智能輪胎各向加速度信號特征基本保持不變,而在加速工況下,智能輪胎的加速度信號會隨車速的增加而明顯增大,在制動時,智能輪胎的加速度信號會隨車速的降低而減小。須進一步分析和提取加速度信號特征。
3 智能輪胎加速度信號特征提取
3.1 輪胎力與輪胎變形的關系
輪胎接地印跡附近的變形如圖9所示[10]。
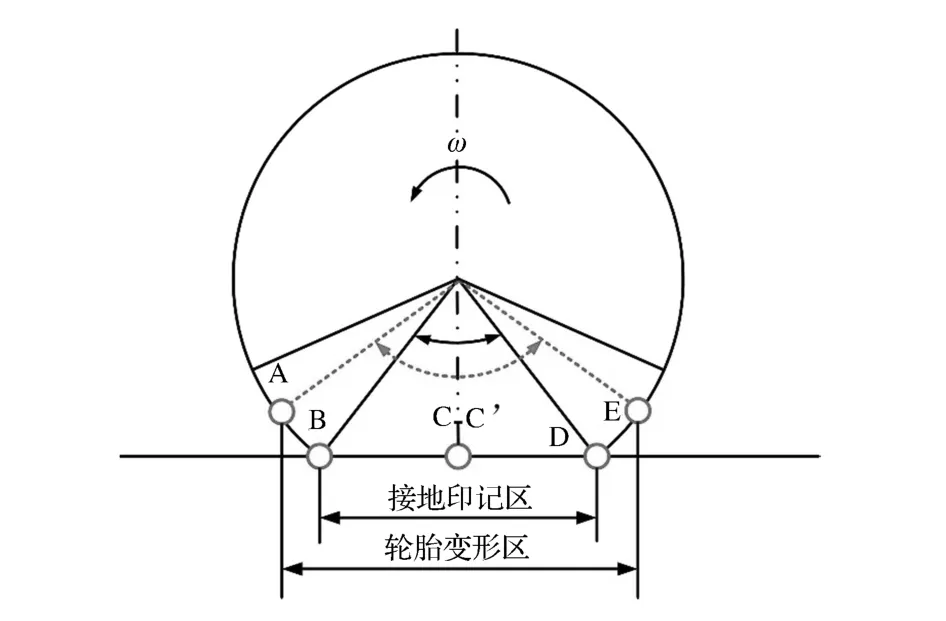
圖9 輪胎接地印跡附近的變形圖
由圖可見,車輪在不受縱向力時,其接地印跡的中心C在車軸的投影線C′上,而在輪胎縱向力作用下,接地印跡的中心將發生移動,接地印跡的中心將與車軸的投影線發生偏離。所以輪胎變形區的AB,BD和DE 3個區域的周向加速度信號響應對應著不同大小的輪胎縱向力。
意大利S.M.Savaresi等人在研究輪胎力與輪胎應變關系時認為輪胎垂向力與輪胎變形關系如圖10所示[11]。研究認為輪胎垂向力的變化將導致接地印跡長度的變化,輪胎垂向力Fz與輪胎接地印跡的長度ΔΦ是一個正相關函數關系:


圖10 輪胎垂向力與輪胎變形的關系
3.2 輪胎周向加速度信號特征的提取
輪胎周向加速度信號細節如圖11所示。其中A,B,D和E對應圖9中的A,B,D和E。在區域①中周向加速度信號突然增大,再迅速減小,其主要原因是輪胎進入接地印跡前輪胎逐漸拉緊,而進入接地印跡時,輪胎由弧線變為直線發生瞬時壓縮。進入接地印跡后輪胎變形逐漸穩定,周向加速度信號逐漸減小到0。區域②內周向加速度信號保持在0,對應輪胎穩定區域。區域③內周向加速度信號從0迅速減小,變為負值,再迅速增大到0,其原因是加速度計離開接地印跡時,輪胎受到的縱向力減小,輪胎變形由直線變為弧線導致輪胎向后拉伸。
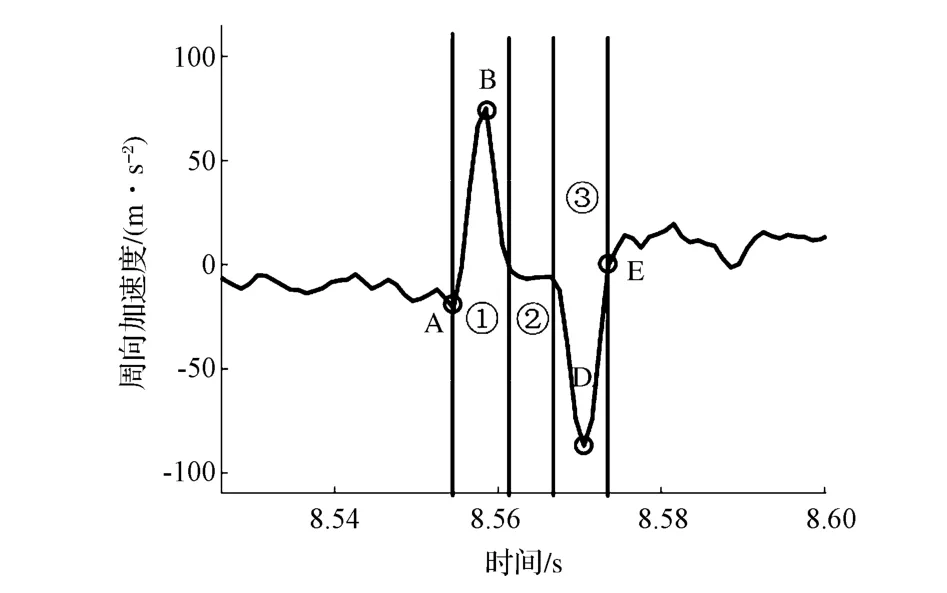
圖11 輪胎周向加速度信號響應細節圖
由輪胎周向加速度信號所提取的特征如圖12所示。周向加速度的兩個極值點對應三軸加速度計進出輪胎接地印跡的時刻B和D,結合輪速可以提取到輪胎周向加速度信號的一個特征Δt。在區域①和區域③內,輪胎的變形不穩定,其所受的輪胎縱向力是變化的,而區域②輪胎的變形保持不變,其所受的輪胎縱向力認為是不變的,提取的特征包括區域①內輪胎周向加速度由極大值axmax到0的時間t1、區域②的時間t2和區域③周向加速度由0減小到極小值axmin的時間t3。另外,周向加速度信號極值的大小也受到縱向輪胎力的影響,所以提取的特征值也包括輪胎周向加速度的極大值axmax與極小值axmin。
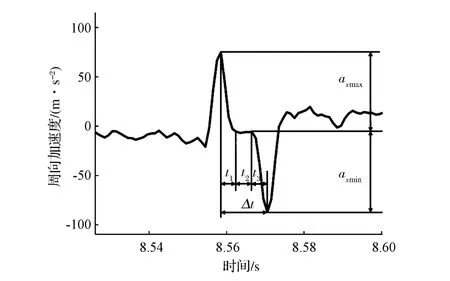
圖12 輪胎周向加速度特征
3.3 輪胎法向加速度信號特征的提取
輪胎法向加速度信號響應細節圖如圖13所示。當加速度計通過輪胎接地印跡時,不會產生垂向振動,因此法向加速度信號基本保持不變,在三軸加速度計進入與離開輪胎接地印跡點A和E時,輪胎法向加速度信號的變化率最大。
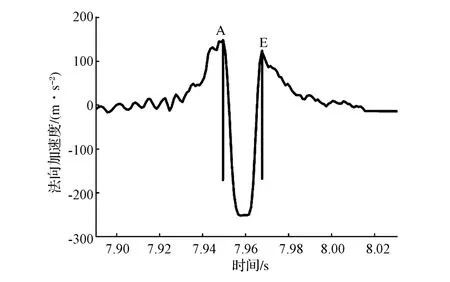
圖13 輪胎法向加速度信號響應細節圖
由輪胎的法向加速度信號所提取的特征如圖14所示。輪胎法向加速度信號的值az在接地印跡區域內幾乎不變,其與輪胎垂向力Fz密切相關,可作為輪胎法向加速度的特征之一。另外,輪胎在法向加速度的兩個極大值所在時刻A和E之間的長度為輪胎變形長度,由輪胎縱向力和垂向力共同決定,所以法向加速度的兩個極大值之間的時間td也可作為輪胎法向加速度信號的一個重要特征。
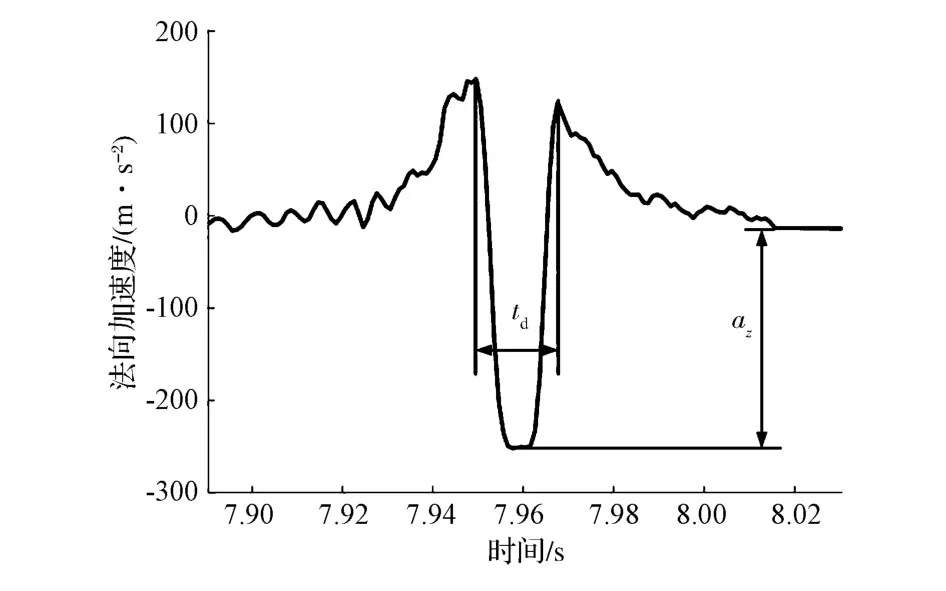
圖14 智能輪胎法向加速度的典型特征
4 輪胎力估計算法
4.1 基于加速度的輪胎力估計算法基本思想
根據提取的智能輪胎加速度的信號特征,結合輪胎力的影響因素,如輪速等,找出智能輪胎加速度信號與輪胎力的關系,即可由加速度信號估計輪胎力。由于輪胎是典型的非線性系統,很難直接建立這些信息與輪胎力之間關系的解析表達式,因此,本文中選用BP神經網絡算法來實現對輪胎力的估計。
4.2 基于BP神經網絡的輪胎力估計
由于所提取智能輪胎加速度信號的特征對輪胎縱向力Fx、垂向力Fz的響應機理不同,所以對這兩個方向的力各采用一個獨立的神經網絡模型來估計。
4.2.1 縱向輪胎力估計算法
輪胎縱向力估計的神經網絡模型如圖15所示,其中輸入層包含6個結點,包括智能輪胎周向加速度的5個特征和輪速;隱含層有兩層,其中第一隱含層包含10個結點,第二隱含層包含5個結點;輸出層只有一個結點,為縱向輪胎力。
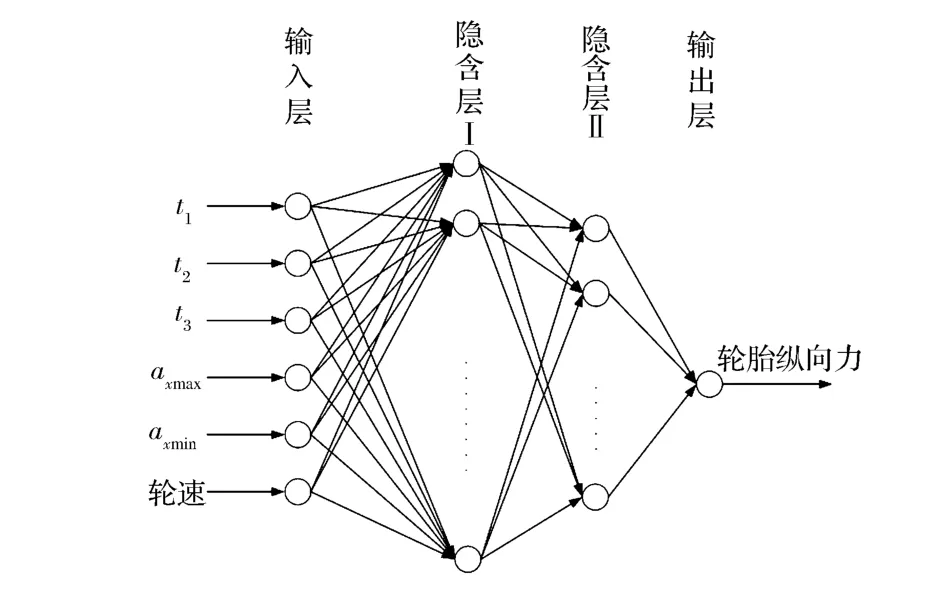
圖15 輪胎縱向力估計算法神經網絡模型圖
所采集的智能輪胎信號和輪胎力信號一部分用來訓練,一部分用來驗證,結果如圖16所示。
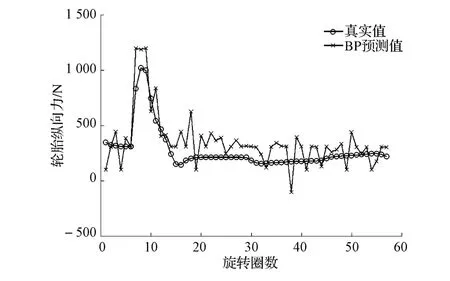
圖16 輪胎縱向力的神經網絡訓練效果
4.2.2 垂向輪胎力估計算法
輪胎垂向力估計的神經網絡模型如圖17所示,其中輸入層包含4個結點,包括智能輪胎周向加速度的一個特征、法向加速度信號的兩個特征及輪速;只有一層隱含層為10個結點;輸出層只有1個結點為輪胎垂向力。
對輪胎垂向力也采用一部分數據進行訓練,一部分進行驗證,其訓練效果如圖18所示。
縱向輪胎力和垂向輪胎力的神經網絡訓練效果表明,基于智能輪胎加速度信號的輪胎力估計算法有效可行。
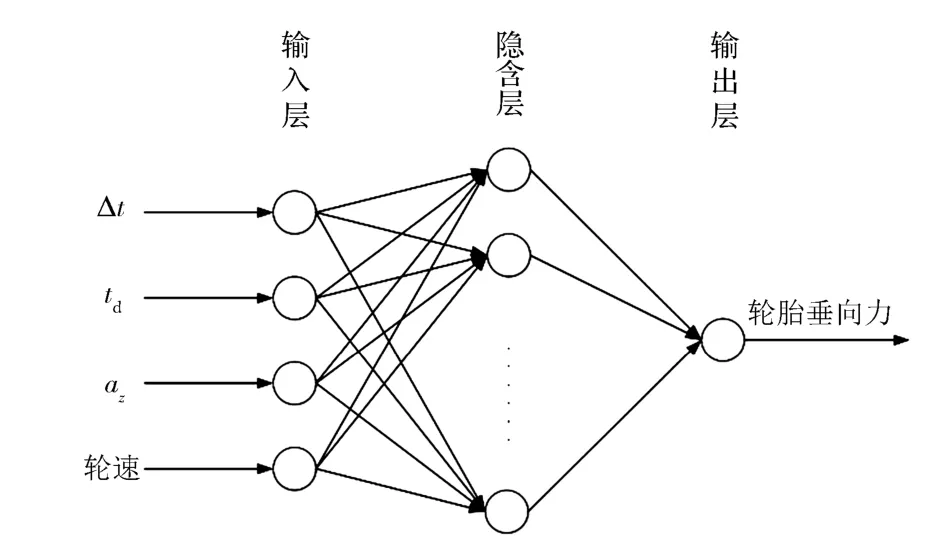
圖17 輪胎垂向力估計算法神經網絡模型圖
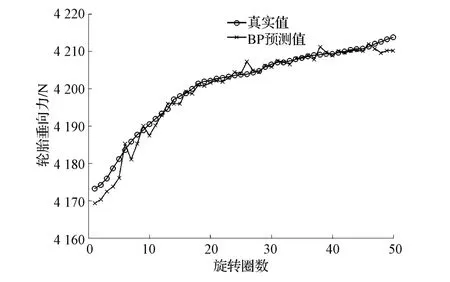
圖18 輪胎垂向力的神經網絡訓練效果
5 結論
本文中提出了智能輪胎設計的整體方案,建立了智能輪胎系統。搭建了實車試驗平臺,進行了智能輪胎的實車試驗,采集了多組工況下的智能輪胎信號。應用智能輪胎實車試驗獲取的信號,對智能輪胎加速度信號進行了響應機理分析;基于提取的智能輪胎加速度信號的典型特征,結合輪速等影響因素,對縱向和垂向輪胎力進行了估計。結果表明,所提出的算法有效可行,可對輪胎力進行準確的估計。
[1] RAY L R.Nonlinear state and tire force estimation for advanced vehicle control[J].IEEE Transactions on Control Systems Technology,1995:117-124.
[2] 張為.基于虛擬傳感器的輪胎力和車輛狀態變量估算[J].北京工業大學學報,2011,37(8):1196-1204.
[3] 葉浩,劉國海,張多,等.采用RKF輪胎力估計的4WID電動汽車縱向速度估計研究[J].機械科學與技術,2017,36(4):637-642.
[4] 揭琳峰,王國林,周孔亢.智能輪胎傳感器技術研究現狀[J].汽車工程,2010,28(6):569-573.
[5] LIU Y H,LI T,YANG Y,et al.Estimation of tire-road friction coefficient based on combined APF-IEKF and iterationalgorithm[J].Mechanical Systems and Signal Processing, 2017, 88:25-35.
[6] ZHU Xiaolong,DANG Lu.A ‘smart tire’for estimating the tire force and the extents of the influences of specific factors[J].Journal of Automobile Engineering,2017.
[7] SINGH K B,TAHERI S.Estimation of tire-road friction coefficient and its application in chassis control systems[J].Systems Science& Control Engineering,2015,3(1):39-61.
[8] KHALEGHIAN S,TAHERI S.Terrain classification using intelligent tire[J].Journal of Terramechanics, 2017, 71:15-24.
[9] NISKANEN A J,TUONONEN A J.Detection of the local sliding in the tyre-road contact by measuring vibrations on the inner liner of the tyre[J].Measurement Science and Technology, 2017, 28(5):055007.
[10] YANG X,OLATUNBOSUN O, RAMOS D G P, et al.Experimental investigation of tire dynamic strain characteristics for developing strain-based smart tire system[J].SAE International Journal of Passenger Cars-Mechanical Systems, 2013, 6(1):97-108.
[11] SAVARESISM,TANELLIM,LANGTHALER P,et al.New regressors for the direct identification of tire deformation in road vehicles via “in-tire” accelerometers[J].IEEE Transactions on Control Systems Technology,2008,16(4):769-780.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:25:42
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54