嵌入式谷物流量傳感器設計與試驗
2018-03-10 08:05:03熊迎軍沈明霞張保華
農業工程學報 2018年5期
熊迎軍,周 俊,韋 瑋,沈明霞,張保華
(1. 南京農業大學信息科學與技術學院,南京 210095;2. 南京農業大學工學院,南京 210031)
0 引 言
作物產量受農田土壤特性、生產管理方式等多種因素影響,在空間上存在差異[1-2]。獲取作物產量信息,建立產量分布圖,是實現作物生產過程中科學調控投入和制定管理決策措施的重要基礎,也是實現精細農業的核心技術和先決條件[3]。谷物測產系統是進行作物產量獲取的重要工具,出現已有接近30年歷史[4-5]。從原理上劃分,谷物測產系統的核心部件谷物流量傳感器可分成基于質量流和基于體積流2個類型[6-8]。相比之下,前者的精度和穩定性較好,所以歐美主流測產系統大都基于質量流原理[9],如美國Case IH公司的AFS系統、John Deere公司的Green Star系統、Ag Leader公司的PF advantage系統、Micro-Trak公司的Grain-Trak系統以及英國Massey Ferguson AGCO公司的Field Star系統等。質量流檢測有沖量式、稱重式以及伽馬射線式等多種實現形式,其中沖量式由于實現相對簡單并且安裝方便,應用最為廣泛[10-11]。2001年,中國農業大學的孫宇瑞等率先在國內開展了沖量式谷物測產系統試驗研究[12],此后,上海交通大學[13]提出了基于平行梁結構測量元件的沖量式谷物質量流量傳感器,并開展了田間試驗。圍繞著平行梁結構測量元件,南京農業大學[14]、江蘇大學[15]、華南農業大學[16]等研究機構也相繼開展了谷物測產系統研究。為了提高傳感器信號處理系統的集成度,2015年,王恒兵[17]在雙平行梁測量元件基礎上,基于DSP技術設計了智能谷物流量傳感器信號處理模塊,進行了實驗室測試。總體上看,國內的技術水平相比國外有較大差距,盡管近幾年國內還出現了基于稱重式質量流原理和光電式體積流原理的谷物測產系統研究[18-20],但是和沖量式一樣,目前還沒有成熟產品出現,在國內繼續開展易于集成、易于推廣應用的實用化谷物測產系統研究仍有必要。
鑒于此,本文引入嵌入式系統技術,設計了一款嵌入式谷物質量流量傳感器并進行了田間試驗。該傳感器能夠利用ARM處理器處理谷物流量信號,實時輸出谷物質量流量數據。
1 嵌入式谷物質量流量傳感器總體設計
如圖 1所示,整個系統由測量指、參考指、測量平行梁、參考平行梁、信號采集處理模塊、RTK GPS以及車載顯示終端組成。其中 RTKGPS是智能農機的標配裝備,在本系統中主要用來獲取作業位置和計算實時作業面積。前面的測量指檢測谷物沖擊信號,同時也受到機身振動影響,后面的參考指檢測收割機振動等干擾信號[21]。平行梁傳感器由彈性應變梁和惠斯登電橋組成,能夠將測量指和參考指檢測到的壓力信號轉換為電壓信號。信號進入嵌入式谷物沖量信號采集處理模塊后,由模擬信號為數字信號,通過自適應對消算法融合處理,濾除振動干擾,輸出實時谷物沖量信息,結合實際作業面積,獲得農田各位置的谷物產量。圖2是系統主要部件實物圖。
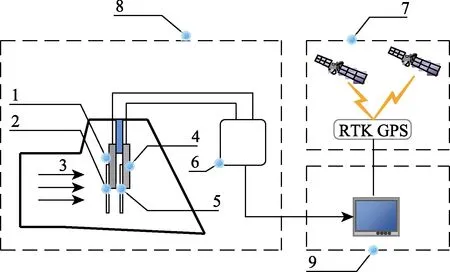
圖1 谷物測產系統總體結構圖Fig.1 Structure of grain yield monitoring system
2 嵌入式信號采集處理模塊硬件設計
本系統采用JHBL-3型平行梁傳感器,該傳感器靈敏度為2 mV/V,激勵電壓為5 V,所以平行梁傳感器滿幅輸出范圍為–10~+10 mv。谷物測產環境振動干擾較大,導致平行梁傳感器輸出信號不但幅度較小,噪聲也較大。為了盡可能提高信噪比,設計了由前置放大模塊、抗混疊濾波模塊、后置放大/ADC模塊組成的兩級信號調理放大電路,如圖3所示。
當放大電路總增益為 128倍時,正好位于后置放大/ADC轉換模塊的參考電壓(2.048 V)所限定的區域內,并且留有裕度。前置放大模塊基于儀表放大器AD623設計,對平行梁傳感器輸出的差分信號進行64倍放大,并將其轉換成單端信號。為了降低模擬噪聲的影響,在信號進入后置放大/ADC模塊之前,增加一個二階巴特沃斯低通濾波器進行抗混疊濾波,考慮到 2個平行梁傳感器信號處理通道都需要運放構建濾波器,采用單芯片雙運放SGM8422設計抗混疊濾波模塊。后置放大/ADC模塊則基于單芯片 HY16F188構建,該芯片是臺灣纮康科技設計的一款32位混合信號微控制器,集成24位AD和PGA模塊。HY16F188的特性使得后置放大/ADC模塊不但可以對信號進行 2倍放大和數字化,也可以利用微控制的運算資源對信號進行異常值檢測等預處理。如圖 3所示,在每個通道各引入一片HY6F188處理器,以便能夠并行預處理。2片HY16F188通過串口通信將數據傳輸至STM32F405處理器進行自適應對消處理。STM32F405是意法半導體公司的一款32位ARM處理器,主頻可達168 MHz,并且集成 DSP模塊,支持浮點運算,根據開發板測試,能夠滿足嵌入式谷物質量流量傳感器設計需要。為了保證2個芯片采集盡可能同步,將2片HY16F188的串口RXD信號直接接到STM32F405處理器的同一個TXD引腳上。每次采集時,由STM32F405通過TXD腳向2片HY16F188發送觸發信號,HY16F188收到這個觸發信號時即刻開始新一輪采集。
3 自適應干擾對消算法及嵌入式平臺實現
由于振動噪聲的影響,谷物沖量信號處理變得尤為復雜,甚至于國外已經商品化的沖量式谷物測產系統仍舊受到機器振動、地形等噪聲因素的干擾而導致實際應用存在不少問題[22-23]。周俊等[24-25]對單平行梁谷物沖量傳感器信號處理進行了系統研究,但是田間試驗效果不太理想。胡均萬等[16]在此基礎上,提出采用雙板模擬差分降低振動干擾,陳樹人等通過試驗證明雙板模擬差分有明顯效果[26]。但是劉成良等[27-28]指出模擬差分受制于結構參數,適應性欠佳,因此,本文提出了一種如圖 4所示的數字自適應干擾對消方法。
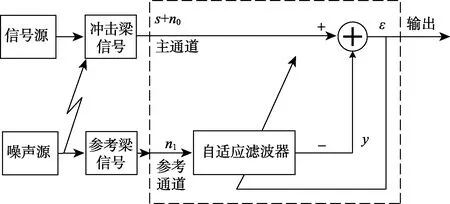
圖4 自適應干擾對消濾波器Fig.4 Adaptive interference cancellation filter
其中n0是沖擊梁接收的與谷物沖擊信號不相關的振動噪聲,n1與沖擊信號s不相關,但與振動噪聲n0一定程度上相關。通過最小二乘法調整自適應濾波器輸出信號y,使均方誤差E{ε2}最小,保證y在最小均方意義下逼近主通道振動噪聲 n0,進而獲得谷物沖擊信號的最佳估計。
測量通道和參考通道的信號由于結構和采集方式等因素的影響無法做到同步[29],直接相減會造成一定誤差。為了減小 2個通道信號之間的時延,在自適應對消之前首先分別截取 2個平行梁的輸出信號,求取最大相關系數,從最大相關系數位置提取子序列進行對消。假定某一時刻參考平行梁輸出信號中與測量平行梁的 N個采樣值 x(n)(n=0,1,2,···, N–1)最大相關的子序列為 zm(n) (n=0,1,2,···, N–1),則對消后誤差信號為:

式中w為對消因子。
根據最小二乘法,為了最大程度地對消振動干擾,對均方誤差E{ε(n)2}對w因子求一階導數并令之等于0,可得最小均方誤差的條件為
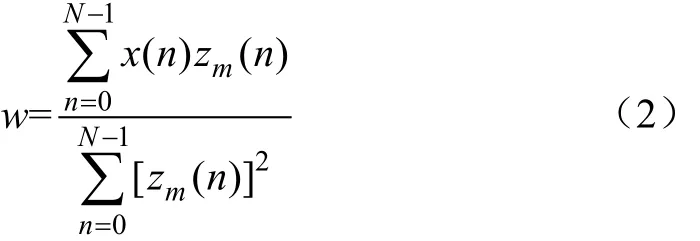
通過式(2)得到對消因子后,將其帶入式(1),即可得到干擾對消后的谷物沖擊信號。
可以看出,嵌入式信號采集處理模塊的軟件需要完成谷物沖擊信號和振動干擾信號采集接收、雙平行梁數據序列最佳對消點求取、自適應對消以及串口或者CAN總線數據發送等功能模塊。為了更好的在嵌入式平臺實現這些功能,在STM32F405平臺引入實時操作系統RT Thread。該操作系統是一個主要由中國開發人員維護的搶占式開源嵌入式操作系統。利用 RT Thread的多線程功能,設計處理線程Thread_PRO,在該線程的回調函數中實現最佳對消點求取、自適應對消等邏輯功能。串口通過中斷方式接收數據,設置 2個互斥變量 Mutex_A和Mutex_B,每個串口收到每輪的規定數目數據時置對應的互斥變量為True,Thead_PRO線程的回調函數檢測到互斥變量Mutex_A和Mutex_B均為True時,開始進行最佳對消點求取和自適應對消,并將對消得到的谷物沖擊數據通過串口或者CAN總線傳輸到上位機。
4 谷物測產系統上位機軟件設計
國外的測產系統都有自帶的產量圖生成軟件,但這些軟件都只適用于配套的設備,且不能進行二次開發[30]。為了方便測產結果的顯示和存儲以及產量圖的形成,配合嵌入式谷物流量傳感器,利用MFC(microsoft foundation classes,MFC)設計了谷物測產系統上位機軟件。該軟件有兩個獨立的數據源,分別是谷物流量傳感器數據和RTK GPS數據。2路數據均通過串口上傳至上位機,所以首先要設計串口通信模塊。具體可以通過 WINDOWS API、VC++標準通信函數、MSCOM 控件以及第三方控件類等方式實現串口通信。MSCOM 控件有事件驅動(Eventdriver)、查詢(Inquire)等2種數據處理方式,前者效率相對較高,本系統上位機軟件即采用MSCOM控件的事件驅動方式進行數據接收。
當新數據到達上位機時,會自動觸發OnComm事件,上位機軟件檢測到該事件后,立即進入各自數據接收處理服務程序。由于系統作業之前首先要進行標定,但每個收割季節僅需要做1次標定。如圖5a所示,開始測產之前,首先要手動選擇是否要進行標定,如果不標定,則采用之前保存的標定系數進行測產,否則進入標定流程。谷物質量流量傳感器數據乘以標定系數得到實際的谷物質量,而要計算產量還需要結合GPS數據獲得作業面積。GPS產生的經緯度數據是球面坐標數據,并不能直接使用,必須通過高斯變換轉換成平面坐標[31]。為了在谷物產量數據處理邏輯中獲得實時位置數據,在軟件設置2個全局變量,存儲實時位置數據,由GPS接收服務程序更新。
實時作業面積每5 s計算1次,用第i秒得到的位置坐標和第i-5秒的位置坐標就可以求得收獲機械這5 s內行走的面積。根據式(3)即可求得5 s內的實時產量。

式中Ti為5 s內的實時公頃產量,kg/hm2;Hi為5 s內的總產量,kg;xi為第 i秒的x坐標,m;xi-5為第(i-5)秒的x坐標,m;yi為第i秒的y坐標,m;yi-5為第(i-5)秒的y坐標,m;w′為表示收割機作業幅寬,m。
由圖5 a可知,獲得實時產量數據后,上位機軟件將對產量數據進行存儲和顯示。其中,存儲以TXT形式進行,而顯示功能是通過主界面實時刷新產量數據和生成產量圖 2種方式實現。產量圖起始點坐標設定在產量圖顯示區域的中心,以該點為原點建立屏幕坐標系。為了增強顯示效果,每個實時谷物產量值對應坐標投影像素點的一個 8連通區域,按照產量值不同,為該區域繪制不同等級顏色。產量圖生成功能啟動后,首先通過地塊號檢查是否已存在對應的地塊產量文件,如果存在,則自動載入數據,并利用已存在的數據求出車輛坐標轉換到屏幕顯示區域的投影系數,否則按照初始給定的投影系數繪制產量圖,并同步存儲原始產量數據。當出現收割機軌跡超過繪圖區域的情況,將坐標投影到屏幕顯示區域的系數縮小1/4,重新繪制已繪制的數據,然后繼續繪制,以保證整個產量圖能夠在繪圖區域中完整顯示。如果是加載歷史產量文件方式繪制時,則首先獲得產量文件中的車輛坐標極值,直接求出合適的投影系數。圖5b是最終實現的上位機軟件界面。
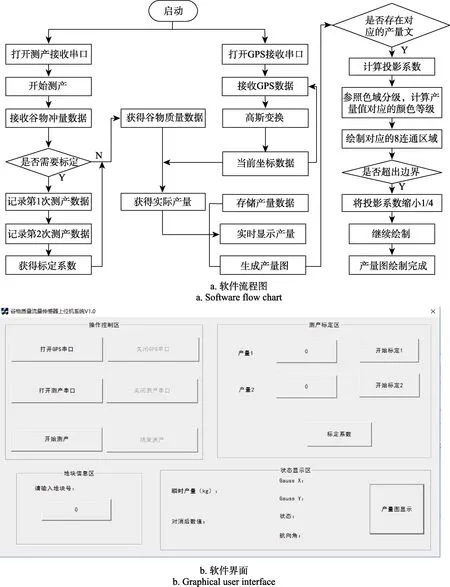
圖5 上位機軟件流程圖和軟件界面Fig.5 Flow chart and graphical user interface for upper-computer software
5 田間試驗
試驗平臺采用泰州常發農業裝備有限公司生產的CF703型號的谷物聯合收割機,如圖 6所示。整機外形尺寸為5 115 mm×2 813 mm×2 300 mm,額定功率75 kW。安裝基于嵌入式系統的谷物流量傳感器和RTK GPS,正常收割速度為1 m/s,收割幅寬為2 m。為測試基于嵌入式的谷物流量傳感器性能,2016年11月份,在江蘇省揚州市江都區一塊稻田進行實地空載振動試驗、標定試驗和測產試驗,試驗過程中保證其工作狀態相同。
5.1 振動試驗
振動試驗分為原地小油門、原地大油門和行走工作(1 m/s)等3個工況在實際田地進行。每個工況都啟動割臺和脫粒滾筒,行走工作工況是在田地里進行空載行走試驗,處于正常收割工作狀態,但不做實際收割。每個工況進行1 min采樣,每1 s產生500個谷物實時沖量數據,取均值作為每秒的谷物沖量值。

圖6 CF703型號谷物聯合收割機Fig.6 CF703 type grain combine harvester

圖7 3種工作工況下空載振動信號曲線Fig.7 Plots of vibration signal under three kinds of no-load condition
試驗發現,3種工況的嵌入式谷物流量傳感器輸出信號在一定范圍內相對穩定波動,未采用自適應干擾對消時,原始沖擊信號變化幅度最大可超過±1 000 mV。在進行空載振動試驗時,由于無糧食沖擊,所以理論上由式(1)得到的誤差信號序列的算術平均值應該為 0,但如圖 7所示,實際場景中由于受到各種因素影響,對消結果的均值不會為0。可以看出,原地小油門工況信號幅值主要位于區間[10 mV,33 mV],原地大油門工況信號主要位于區間[20 mV,43 mV],而行走工況多數信號值位于區間[15 mV,45 mV],總體在區間 [2.5 mV, 54 mV]變動,相比未進行自適應干擾對消的信號,變動幅度降低了1?(54?2.5)/2 000=97.4%。
5.2 嵌入式谷物質量流量傳感器標定試驗
標定試驗主要是將嵌入式谷物質量流量傳感器的嵌入式采集處理模塊輸出的谷物沖擊信號和實際的產量大小建立一定的函數關系,建立函數模型,通過實地正常收割試驗,計算得到標定系數,從而可以得到實際產量。
1)標定方法
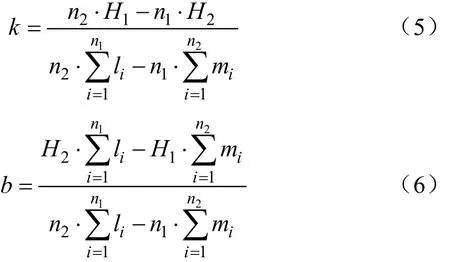
谷物沖擊信號與谷物實際質量成線性關系,所以采用一次函數標定,至少需要2次試驗可以獲得標定系數。假設每秒得到的數字信號均值為Gi,該秒內的產量為Ti,標定系數為k和b,由一次函數模型可知:

在標定試驗中,收割機在田塊中正常行走收獲 2次(1次指的是實際收割1段距離記錄1次產量),分別記下兩次的實際總產量分別為H1和H2,而在2次收獲過程中,每秒采集的數字信號均值分別為l1,l2,…,ln1和m1,m2,…,mn2,2次收獲時間分別為n1秒、n2秒,利用直線擬合方法,根據式(5)和(6),即可求出標定系數k和b。
只要在測產軟件標定區內輸入 2次實際測量得到的產量值,就可以求出該區域內的標定系數。
2)標定結果
在2次標定試驗中,每次收割20 m,累計通過稱量質量測得2次收獲實際產量為12.5和25.6 kg,在圖5b所示軟件界面測產標定區上的“產量1”和“產量2”上分別輸入12.5和25.6,點擊“標定系數”按鈕,可得到標定系數:k=0.008 299,b=-0.930 819 5。
5.3 測產試驗
測產試驗在完成標定試驗后進行,在一塊大區域的農田進行水稻收割。該農田的土壤肥沃程度、田間的管理因素等影響相近,在其中選取了 3塊進行測產試驗,分別編號1116、1117和1118。收割路徑按照由外向里轉圈的方式進行收割,由于特殊情況,1118 號地塊中間部分未收割,實際收割地塊為總地塊減去中間未收割地塊,故后面的1118號地塊均指實際的收割地塊。為了更加準確分析智能谷物流量傳感器的性能,根據實際土地情況,將三塊農田細分成小塊,其中1116和1118各分成3小塊,1117分成2小塊。在測產試驗后,通過稱量質量的方式獲得實際產量(面積采用易力S5pro型計畝儀獲取),作為谷物流量傳感器精度評定的參考標準,根據谷物流量傳感器的輸出數據獲得的每一小塊農田實時產量數據序列累加和的均值,作為谷物流量傳感器獲得的該塊農田的公頃產量。相對誤差則是由實時產量均值與實際公頃產量相比較獲得,用來描述測產傳感器的精度,測產試驗數據如表1所示。
綜合3塊農田產量情況,1116號地塊的產量最高,測量相對誤差最大不超過3.9%,說明谷物流量傳感器測量比較準確。而1117號地塊和1118號的公頃產量比1116號地塊少,最大測量相對誤差為7.4%。通過分析發現,1117號和1118號地塊測產精度相對較低的原因可能是這兩塊地的公頃產量較低,沖擊在平行梁上的力較小,有效信號較為微弱,噪聲信號的影響則相對較強,導致測產數據的相對誤差相對偏大。
圖 8是最終形成的公頃產量分布圖。由于一般的地塊公頃產量大概為 7 500 ~10 500 kg,所以將產量圖的色域分為12級。小于6 000 kg為一級,表示為藍色,大于12 000 kg為一級,表示為紅色,6 000 ~12 000 kg之間均分為10級,從藍色漸變到紅色,表示產量逐漸增大。通過產量圖可以直觀看出農田各位置的產量分布情況,但是該圖沒有對產量數據進行插值和濾波,所以產量圖存在產量不連續和個別區域產量過高的問題。
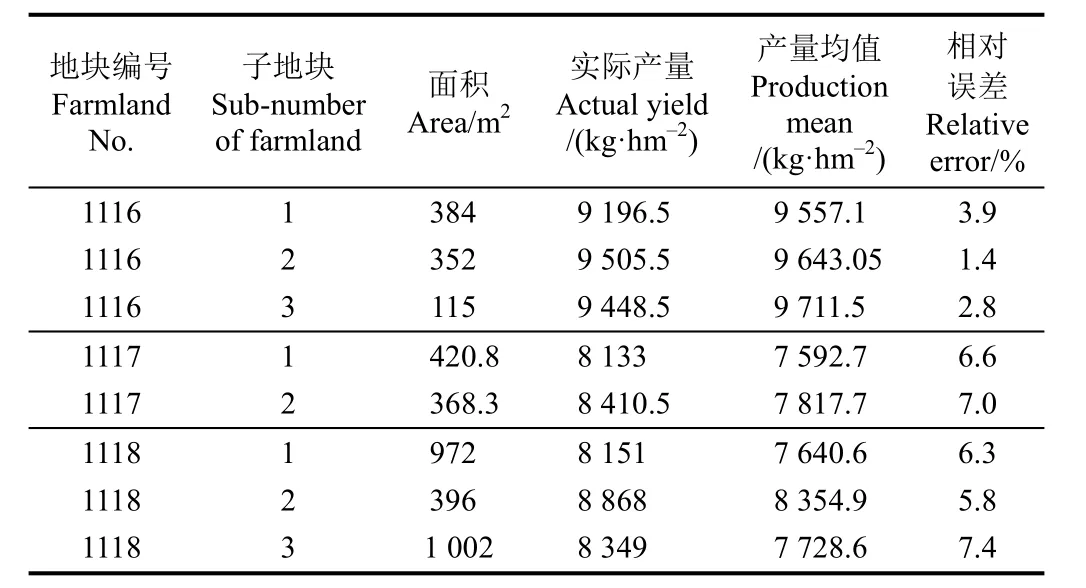
表1 嵌入式谷物質量流量傳感器實際測產試驗數據Table 1 Data for yield monitoring experiment with grain mass flow sensor based on embedded system

圖8 3塊地(1116、1117和1118)的產量分布示意圖Fig.8 Yield distribution map of block 1116,1117 and 1118
6 結 論
1)基于嵌入式系統技術設計了嵌入式谷物質量流量傳感器。該傳感器的信號采集處理模塊能夠利用差分信號采集通道將模擬谷物沖量信號轉換為數字量,通過嵌入式處理器STM32F405運行信號處理算法,濾除振動干擾,直接輸出相對精確的谷物沖擊信號。為了方便測產試驗,同時基于MFC設計了配套的上位機軟件,用于谷物產量顯示、存儲和產量圖生成。
2)通過空載振動試驗和田間測產試驗對嵌入式谷物質量流量傳感器的性能進行測試。振動試驗發現傳感器輸出信號均值隨空載振動強度增強而增大,原始沖擊信號經過自適應對消處理后,變化幅度減小了97.4%。采用線性方程對傳感器進行了標定,選擇3塊田地共計進行8次測產試驗,試驗結果表明傳感器測量精度在7.4%以內,同時發現,產量越高,傳感器的測量精度越高,給出了最終形成的產量分布圖,可以明顯看出農田各位置的谷物產量分布情況,但是由于未對產量數據進行插值和濾波,所以產量圖存在不連續和個別區域產量值過高的問題。
嵌入式谷物質量流量傳感器能夠直接輸出谷物質量流量信號,上位機僅需要加入RTK GPS,按步驟標定即可進行谷物測產工作,無須對谷物質量流量信號做進一步處理,對車載終端或者車載顯示器的依賴較少,易于集成和推廣應用。不過,雖然目前該傳感器能夠滿足測產需要,但在算法中未能考慮濕度、升運器轉速以及車輛前進速度變化等因素,使得系統還有較大升級空間,未來將逐步引入這些因素,改進算法,使得谷物流量傳感器的穩定性和精度能夠得到進一步提高。
[1] 汪懋華. “精細農業”發展與工程技術創新[J]. 農業工程學報,1999,15(1):1—8.Wang Maohua. Development of precision agriculture and innovation of engineering technologies[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 1999, 15(1): 1—8. (in Chinese with English abstract)
[2] Yang C, Peterson C L, Shropshire G J, et al. Spatial variability of field topography and wheat yield in the palouse region of the Pacific Northwest[J]. Transactions of the ASAE,1998, 41(1): 17.
[3] 羅錫文,臧英,周志艷,等. 精細農業中農情信息采集技術的研究進展[J]. 農業工程學報,2006,22(1):167—173.Luo Xiwen, Zang Ying, Zhou Zhiyan, et al. Research progress in farming information acquisition technique for precision agriculture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2006, 22(1):167—173. (in Chinese with English abstract)
[4] Shoji K, Miyamoto M. Improving the accuracy of estimating grain weight by discriminating each grain impact on the yield sensor[J]. Precision Agriculture, 2014, 15(1): 31—43.
[5] Schueller J K, Mailander M P, Krutz G W. Combine feedrate sensors[J]. Transactions of the ASAE, 1985, 28(1): 2—0005.
[6] Arslan S, Colvin T S. Grain yield mapping: Yield sensing,yield reconstruction, and errors[J]. Precision Agriculture,2002, 3(2): 135—154.
[7] Chung S O, Choi M C, Lee K H, et al. Sensing technologies for grain crop yield monitoring systems: A review[J]. Journal of Biosystems Engineering, 2016, 41(4): 408—417.
[8] 介戰,劉紅俊,侯鳳云. 中國精準農業聯合收割機研究現狀與前景展望[J]. 農業工程學報,2005,21(2):179—182.Jie Zhan, Liu Hongjun, Hou Fengyun. Research advances and prospects of combine on precision agriculture in China[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2005, 21(2): 179—182. (in Chinese with English abstract)
[9] 王薄,李民贊,張成龍,等. 沖擊式谷物流量傳感器設計與性能試驗[J]. 農業機械學報,2009,40(增刊1):52—56.Wang Bo, Li Minzan, Zhang Chenglong, et al. Development of grain flow sensor for yield monitor system[J].Transactions of The Chinese Society for Agricultural Machinery, 2009, 40(Supp.1): 52—56. (in Chinese with English abstract)
[10] Choung K L, Michihisa I, Toshikazu K. Development of impact type sensor for heading feeding combine[J]. Journal of the JSAM, 2000, 62(4): 81—88.
[11] Reyns P, Missotten B, Ramon H, et al. A review of combine sensors for precision farming[J]. Precision Agriculture, 2002,3(2): 169—182.
[12] 孫宇瑞,汪懋華,馬道坤,等. 沖量法谷物流量測量系統的試驗研究[J]. 農業機械學報,2001,32(4):48—50.Sun Yurui, Wang Maohua, Ma Daokun, et al. Experimental research on grain-flow-measurement system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2001,32(4): 48—50. (in Chinese with English abstract)
[13] 周俊,周國祥,苗玉彬,等. 懸臂梁沖量式谷物質量流量傳感器阻尼設計[J]. 農業機械學報,2005,36(11):121—123,127.Zhou Jun, Zhou Guoxiang, Miao Yubin, et al. Damping design of impact-based grain yield sensor[J]. Transactions of the Chinese Society for Agricultural Machinery, 2005, 36(11):121—123, 127. (in Chinese with English abstract)
[14] 周俊,苗玉彬,張鳳傳,等. 平行梁沖量式谷物質量流量傳感器田間實驗[J]. 農業機械學報,2006,37(6):102—105.Zhou Jun, Miao Yubin, Zhang Fengchuan, et al. Field testing of parallel beam impact-based yield monitor[J]. Transactions of the Chinese Society for Agricultural Machinery,2006,37(6): 102—105. (in Chinese with English abstract)
[15] 陳樹人,張文革,李相平,等. 沖量式谷物流量傳感器性能實驗研究[J]. 農業機械學報,2005,36(2):82—84.Chen Shuren, Zhang Wenge, Li Xiangping, et al. Experiment research of grain mass flow sensor based on impact[J].Transactions of the Chinese Society for Agricultural Machinery, 2005, 36(2): 82—84. (in Chinese with English abstract)
[16] 胡均萬,羅錫文,阮歡,等. 雙板差分沖量式谷物流量傳感器設計[J]. 農業機械學報,2009,40(4):69—72.Hu Junwan, Luo Xiwen, Ruan Huan, et al. Design of a dual-plate differential impact-based yield sensor[J].Transactions of The Chinese Society for Agricultural Machinery, 2009, 40(4): 69—72. (in Chinese with English abstract)
[17] 王恒兵. 基于 DSP的沖量式谷物流量傳感器數據處理系統開發[D]. 南京:南京農業大學,2015.Wang Hengbing. Development of Data Processing System for Impact -Based Grain Flow Sensor Based on DSP[D].Nanjing: Nanjing Agricultural University, 2015. (in Chinese with English abstract)
[18] 李偉,張小超,胡小安,等. 聯合收獲機稱量式測產系統軟件設計[J]. 農業機械學報,2011,42(增刊1):94—99.Li Wei, Zhang Xiaochao, Hu Xiaoan, et al. Design of intelligent yield monitoring software for combine harvester[J].Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(Supp.1): 94—99. (in Chinese with English abstract)
[19] 付興蘭,張兆國,安曉飛,等. 光電漫反射式聯合收割機谷物產量計量系統研發與性能試驗[J]. 農業工程學報,2017,33(3):24—30.Fu Xinglan, Zhang Zhaoguo, An Xiaofei, et al. Development and performance experiment on grain yield monitoring system of combine harvester based on photoelectric diffuse reflectance[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017,33(3): 24—30. (in Chinese with English abstract)
[20] 安曉飛,付興蘭,孟志軍,等. 光電信號與收割機谷物產量數據轉換模型的構建與驗證[J]. 農業工程學報,2017,33(增刊 1):36—41.An Xiaofei, Fu Xinglan, Meng Zhijun, et al. Grain yield data transformation model based on photoelectric principle and its validation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017,33(Supp.1): 36—41. (in Chinese with English abstract)
[21] 叢秉華,周俊. 雙平行梁谷物流量傳感器振動噪聲消除方法[J]. 傳感技術學報,2013,26(3):377—381.Cong Binghua, Zhou Jun. Vibration noise elimination for a grain flow sensor of dual parallel beam load cells[J]. Chinese Journal of Sensors and Actuators, 2013, 26(3): 377—381. (in Chinese with English abstract)
[22] Risius N W. Analysis of a Combine Grain Yield Monitoring System[D]. Ames: Iowa State University, 2014.
[23] Singh Manjeet, Verma Aseem, Sharma Ankit. Precision in grain yield monitoring technologies: A review[J]. AMAAgricultural Mechanization in Asia Africa and Latin America,2012, 43(4): 50.
[24] 周俊,劉成良. 平行梁沖量式谷物質量流量傳感器信號處理方法[J]. 農業工程學報,2008,24(1):183—187.Zhou Jun, Liu Chengliang. Signal processing method for impact-based grain mass flow sensor with parallel beam load cell[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2008, 24(1): 183—187. (in Chinese with English abstract)
[25] 周俊. 沖量式谷物質量流量傳感器及智能測產系統研究[D]. 上海:上海交通大學,2005.Zhou Jun. Research on Impacted-based Grain Mass Sensor and Intelligent Yield Monitor[D]. Shanghai: Shanghai Jiaotong University, 2005. (in Chinese with English abstract)
[26] 陳樹人,楊洪博,李耀明,等. 雙板差分沖量式谷物流量傳感器性能試驗[J]. 農業機械學報,2010,41(8):171—174.Chen Shuren, Yang Hongbo, Li Yaoming, et al. Experiment of dual-plates differential impact-based grain flo- w sensor[J].Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(8): 171—174. (in Chinese with English abstract)
[27] 劉成良,周俊,苑進,等. 新型沖量式谷物聯合收割機智能測產系統[J]. 中國科學:信息科學,2010,40(增刊1):226—231.Liu Chengliang, Zhou Jun, Yuan Jin, et al. Yield monitor system based on impact-based grain mass sensor[J]. Science China Information Sciences, 2010, 40 (Supp.1): 226—231.(in Chinese with English abstract)
[28] Zhou J, Cong B, Liu C. Elimination of vibration noise from an impact-type grain mass flow sensor[J]. Precision Agriculture, 2014, 15(6): 627—638.
[29] 魏新華,張進敏,但志敏,等. 沖量式谷物流量傳感器測產信號處理方法[J]. 農業工程學報,2014,30(15):222—228.Wei Xinhua, Zhang Jinmin, Dan Zhimin, et al. Signal processing method of impact-based grain flow sensor for predicted yield[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014,30(15): 222—228. (in Chinese with English abstract)
[30] 苑嚴偉,張小超,張銀橋,等. 農田糧食產量分布信息數字化研究[J]. 農業工程學報,2006,22(9):133—137.Yuan Yanwei, Zhang Xiaochao, Zhang Yinqiao, et al.Digitization of grain yield and distribution in- formation in farmland[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2006,22(9): 133—137. (in Chinese with English abstract)
[31] 陳進,王坤,李耀明. 基于Mallat算法的谷物流量信號小波去噪方法[J]. 農業工程學報,2017,33(3):190—197.Chen Jin, Wang Kun, Li Yaoming. Wavelet denoising method for grain flow signal based on Mallat algorithm[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(3): 190—197. (in Chinese with English abstract)
猜你喜歡
礦山安全信息(2022年40期)2022-04-07 02:16:52
當代水產(2021年10期)2021-12-05 16:31:48
鴨綠江(2021年35期)2021-04-19 12:24:18
今日農業(2020年20期)2020-11-26 06:09:10
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:23
聚氯乙烯(2018年9期)2018-02-18 01:11:34
電鍍與環保(2016年3期)2017-01-20 08:15:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25