空中目標紅外測量圖像自動判讀方法研究
2018-03-01 09:15:29周慧
兵器裝備工程學報 2018年1期
周 慧
(中國人民解放軍92941部隊, 遼寧 葫蘆島 125000)
隨著紅外圖像傳感器技術的發展,經緯儀的圖像存儲頻率越來越高,目前,光電經緯儀上的紅外傳感器已經達到1000幀/s,如此高的存儲頻率,傳統的人工判讀方式越來越不能滿足任務的需要。同時,由于試驗頻率的加大,滿足成像條件的氣象環境逐漸減少,導致對自動判讀算法性能的要求也越來越高。自動判讀的主要指標是目標特定部位跟蹤的穩定性和定位的準確性。目前,在目標跟蹤方面,大多數研究主要集中在弱目標的跟蹤算法上[1],而且是基于參數預測的方法。由于經緯儀測量圖像的目標和背景同時變化,且背景移動具有較高的無規律性,因此,預測效果實際上并不好。而對于特定部位的跟蹤主要集中在相關匹配算法研究上[2],由于空中目標軌跡的變化,導致目標圖像在形態和大小發生變化,所謂的配準算法很難實現。由于紅外傳感器強大的感應能力,目前大多數紅外測量實際上主要是跟蹤發動機尾焰[3],但是并沒有發現關于發動機尾焰跟蹤定位方面的文獻。至于判讀定位精度,大多數集中在提高標準目標跟蹤定位的算法精度上[4],對于實驗室的典型圖像效果較好,而對實際測量目標圖像的適用性并不理想。
作者根據多年的靶場實際工作經驗,依據測量目標圖像的具體結構和特點,按照測量圖像判讀的具體要求,論述了目標判讀的一些關鍵問題,給出了相應的判讀方法,并在實際圖像處理工作中取得了良好的應用效果。
1 經緯儀測量圖像判讀原理
對于光測設備,一般采用多臺設備交匯測量的定位方式,當然如果實現單臺定位,必須實現單臺測距,目前在被測目標上加合作目標比較困難,進行激光測距還難以實現。兩臺以上的設備跟蹤同一目標,就要求跟蹤目標的同一個部位,測量目標上的同一位置作為目標運動軌跡,這個位置即為判讀同名點。
目前各靶場的經緯儀基本上采用紅外和CCD傳感器,隨著跟蹤距離逐漸增大,紅外傳感器應用越來越多,并且多數選擇中波紅外傳感器。對于飛行目標圖像,一般由彈體和尾焰組成[5,6],如果要在彈體上確定一個同名點,對于可見光圖像,存在拍攝角度誤差引起部位差,但總體還可以忍受。而對于紅外圖像卻很難實現,因為紅外圖像為熱輻射,在異常高的尾焰輻射強度下,彈體蒙皮不可能成像,因此,紅外圖像僅僅為尾焰圖像,隨著距離的逐漸增大,尾焰的成像越來越弱,一旦距離稍遠就變成光團圖像了。
為了在紅外和CCD圖像上判讀同一個部位,同名點就必須選擇在可見光和紅外圖像都能成像的交叉部位,即為發動機尾噴口。在可見光圖像上為尾噴口后邊緣,在紅外圖像上,由于導彈蒙皮很難成像,一般選擇導彈尾焰前端,雖然距尾噴口有一定的距離,但在誤差允許范圍內,已經是最佳選擇了。當然也可以通過計算馬赫盤位置對這一小段距離進行修正,不過,目標特性參數實際上較難測量。
2 典型紅外測量目標的判讀方法
根據同名點判讀的原則,按照拍攝距離的遠近,將紅外和CCD傳感器的測量目標成像分為尾焰圖像、光團圖像和剛體圖像三類進行分析。
2.1 飛行器尾焰圖像
對于近距離的發動機尾焰圖像,總體上一般成拋物線狀顯示,由于經緯儀鏡頭的衍射作用,其拋物線邊緣不可能非常光滑,且由于不同的距離和拍攝方向,導致其形狀和衍射影響差別很大,直接對其進行定位不現實。基于此原因,本文提出了一種基于Hough變換[7]的飛行器尾焰前端判讀方法。對于目前的CCD和紅外傳感器,只有距離較近時發動機尾焰才可成像,此時高度達不到云層,無云雜波等干擾。距離較遠時,經過大氣的衰減,即成為光團圖像。并且由于尾焰的輻射能量很強,背景信息的灰度受到較大抑制,造成紅外圖像對比度很高,導致尾焰邊緣與背景灰度的梯度較大,因此,最佳的方法是首先對圖像進行自適應二值化處理。經過處理后的二值化圖像,其邊緣一般比較規整,按一般處理原則,應當對其拋物線頂端進行二次曲線擬合,由于尾焰圖像邊緣形狀變化較大,實際擬合效果并不理想。
經過長期的工作經驗發現,由于飛行目標速度一般較快,尾焰橫向基本對稱,其最穩定幾何特征為中軸線,且尾焰中軸線必然與尾焰頂端點相交,因此,必須首先提取目標的中軸線。提取中軸線的方法很多,基本上都是根據外形進行提取,而尾焰外形是不穩定的,因此基本上不適用。本文根據尾焰的具體特點,提出了一種利用重心線和Hough算法提取尾焰中軸線的方法,首先判斷尾焰二值化圖像的長寬比,如果在橫軸方向大于縱軸,則在縱軸方向求重心,反之,在橫軸方向求重心,得到每點的重心連線,如下式:
(1)
式(1)中:xi或yi為橫軸或縱軸的重心坐標;i或j為橫軸或縱軸的重心坐標。
由于外形輪廓的不平滑,得到的重心連線不可能全部與尾焰中軸線重合,且尾焰的前端成圓形,所求出的重心線前端不可能與尾焰前端中心相交。但是,重心連線上的多數點還是在尾焰的中軸線上。因此,本文提出一種方法,采用Hough變換技術求取重心直線中的最長線段。由于Hough采用一種投票機制,因此可適當設定一定的線段間隔,以適應一定的噪聲,這樣求出的最長直線一定是尾焰的中軸線。將中軸線段延長,交于尾焰圖像前端,其交點必然是尾焰圖像的前端。具體原理如圖1。
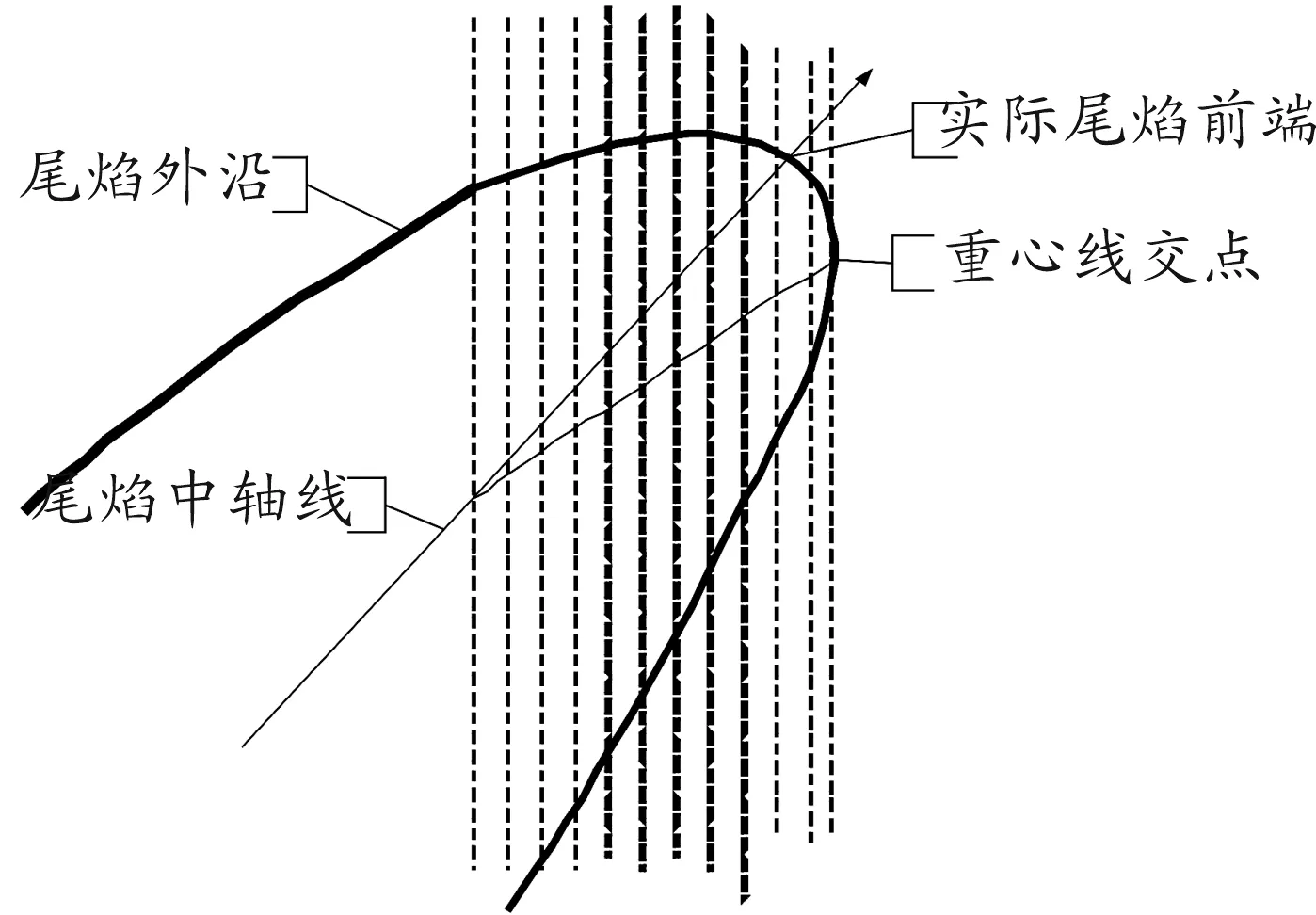
圖1 尾焰圖像判讀示意圖
2.2 光團圖像
對于較遠的目標圖像,由于圖像傳感器的感應能力有限,一般只能成光團形狀,僅僅因距測控站點的遠近不同導致光團大小不同而已,此部分圖像往往占整個軌跡的80%~90%,且定位精度較高。因此,此部分為自動判讀的主要內容,其定位方法基本思想為灰度重心,主要有重心法、均值飄移法等。重心法[8-9]即求取目標重心,此方法受到目標區域的影響,如果目標區域定義過大,背景的影響必然很大,如果目標區域定義過小,則變成了在目標上求重心,而實際上目標灰度很難做到重心區域均衡分布,因此,目標區域的確定非常關鍵;均值漂移算法[10]為求取目標圖像的反向直方圖,前提是必須準確確定目標區域的直方圖,這也要求準確確定目標區域。由此可見兩種算法均要求準確確定目標區域。
目前確定目標區域一般采用圖像二值化方法,即取包含目標圖像的一定區域,此區域一般采用上一幀圖像確定的區域。目標距離拍攝經緯儀越遠,區域也應該越小,且這個縮小量很難判定,在實際應用中效果并不理想。這是因為對于遠距離目標,其邊緣為熱輻射擴散,灰度逐漸遞減,如果疊加上發動機尾焰的變化及背景海浪和云團灰度的變化,導致光團目標邊緣變化具有很強的隨機性,但光團中心輻射能量很強,背景因素很難改變其灰度量。另外,無論何種二值化算法,導致其失效的原因基本上都是由于區域取得過大或過小,區域過大則背景像素比值過大,灰度值不均衡,目標像素與部分背景像素分為一類;如果區域過小,則將目標像素分為兩部分。但在目標判讀時第一幀的區域劃分應該是合理的。
本文根據長期判讀經驗,提出了一種灰度均值恒定方法,其原理為:由于目前經緯儀傳感器拍攝頻率較高,兩幀之間目標的灰度變化并不大,因此,可將前一幀目標的二值化閾值作為下一幀目標的閾值,對圖像進行二值化,得到目標區域后,按前一幀目標和背景的比值,確定后一幀的背景區域。步驟如下:
1) 人工確定第一幀圖像的目標和背景范圍,采用Otsu方法[11]對第一幀圖像進行二值化,并計算目標與背景的像素數比值k。在實際判讀工作中,第一幀圖像往往選擇目標比較清晰的圖像,且根據目標實際大小,人工設定目標范圍,因此,二值化效果非常好;
2) 利用前一幀(如果當前幀為第二幀,則利用第一幀)圖像的閾值對當前幀圖像進行二值化,得到目標區域像素數T。此區域為由前一幀的閾值所得,得到的范圍有一定誤差,由于序列圖像的連續性,目標范圍誤差并不大;
4) 利用重心法對目標中心進行重定位,得到脫靶量值(x,y)。
5) 利用Otsu方法對包含目標的背景正方形區域進行二值化,得到圖像的二值化閾值,作為下一幀圖像的二值化初始閾值。
6) 轉到2),繼續處理下一幀。
此方法充分利用了序列測量圖像各幀之間灰度分布的連續性及目標區域的范圍信息,對下一幀圖像的初始目標區域進行預測,控制了目標區域的異常變化,抵消了目標區域的變化誤差,在使用過程中效果良好,只要不是爆炸和助脫段,其效果是非常理想的,判讀原理及演示結果如圖2。
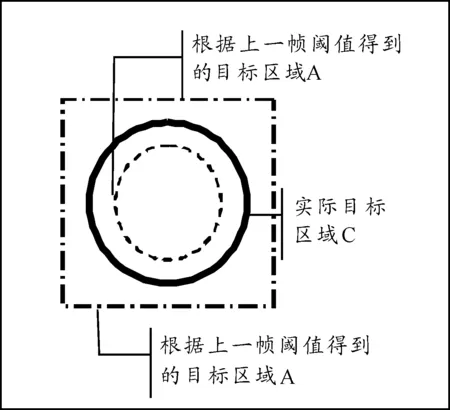
圖2 光團圖像判讀示意圖
2.3 剛體圖像
對于剛體判讀,要求判讀點在目標邊緣,例如,飛機一般為機頭或尾噴口。因此,多數采用模板匹配方法[12],即將第一幀圖像的目標區域作為模板,對第二幀以后的圖像分別進行匹配,圖像中匹配系數最大的位置即為判讀點,然后,將第二幀的目標圖像作為第三幀圖像的匹配模板,依次類推。對于較近的剛體目標,圖像目標比較清晰,目標細節較多,相關性較大,可直接采用模板匹配。但是,對于較遠的剛體目標,目標信號變弱,目標邊緣梯度勢必變差,邊緣像素灰度產生較大的隨機性,而對于空中測量目標,其目標本身較為單一、細節很小,本身相關性就很少,此時采用模板匹配必然存在著匹配誤差,多幀匹配后必然產生誤差積累。目前所有文獻介紹的匹配定位方法都是定位到模板中心,而實際上,靶場目標都是定位到目標邊緣,這樣,模板必須有一半為變化的背景,實際誤差積累是很大的,每幀定位后,必須進行判讀重定位。由于目標的不規則性,重定位算法采用各種灰度質心法不現實,而較差的邊緣,采用各種識別算法,其誤差也是很大的。因此,作者根據長期的圖像處理經驗,結合被測剛體目標的實際運動特性,提出了一種根據目標運動趨勢進行目標重定位的方法。因為判讀點必然位于目標邊緣,且一般都在目標圖像范圍的最外部,所以,首先取得到目標運動的方向,即:
(2)
式(2)中:y2,y1為前兩幀和前一幀的y脫靶量;x2,x1為前兩幀和前一幀的x脫靶量。如果y2>y1,則ky=1,否則ky=-1,如果x2>x1,則kx=1,否則kx=-1。其次,采用Otsu算法對目標圖像進行二值化,實際上應當對目標范圍內的圖像進行二值化,因匹配點已知,此范圍很容易確定。對于剛體目標,目標必在此運動方向上,模板匹配點一定位于目標幾何中心或目標范圍內,因此,可以自此點開始,沿運動方向在相比目標范圍稍大的圖像區域內作數條垂線,某條垂線與目標最后的交點,即為匹配修正點。定位原理示意圖見圖3。
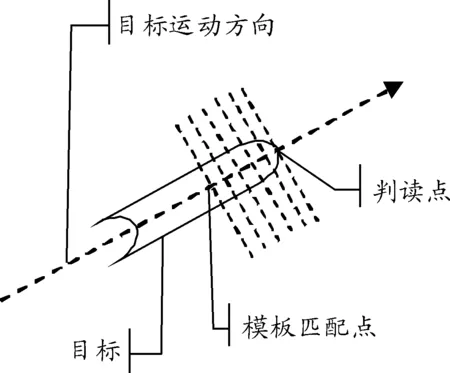
圖3 剛體目標判讀原理示意圖
當然,為了取得邊緣,必須對目標區域進行二值化,由于每幀圖像的自適應二值化方法一致,且目標蒙皮成像,因此,此方法修正精度非常高。
3 實驗結果與分析
為了更好地驗證本文所提算法的有效性,每種方法選取了處理過程的4幅圖像,具體見圖4和圖5。
由圖4可以看出:第一幅圖像為原始圖像,尾焰帶有較強的光學衍射現象。第二幅圖像,其重心連線明顯不在一條直線上,且存在一些斷點,尾焰前端接近圓形,重心連線前端向上彎曲,并不與尾焰前端相交。第三幅圖像為二值化圖像及hough變換所得的中軸線與尾焰前端的交點,尾焰外形盡管基本對稱,但邊緣并不平滑,這也是利用hough變換求最長直線的必要性。第四圖像上可以清晰看到所求交點為尾焰前端。因此,本文提出算法對圖像質量具有較強的適應性,所求的判讀點準確。
由圖5可以看出:第一幅圖像為原始圖像。第二圖像為利用前一幅圖像閾值得到的目標區域,視覺可以看到此區域比目標實際范圍略小。第三幅圖像中的正方形區域為按上一幀圖像目標和背景比例擴大的目標范圍,其范圍比較恰當地包含了目標圖像,對此范圍圖像進行二值化處理可以得到理想的結果,即第四幅圖像。因此,本文算法可以很好地控制目標及所包含的背景范圍,最大限度消除了背景的干擾,從而得到準確的判讀點。

圖4 尾焰圖像判讀效果圖
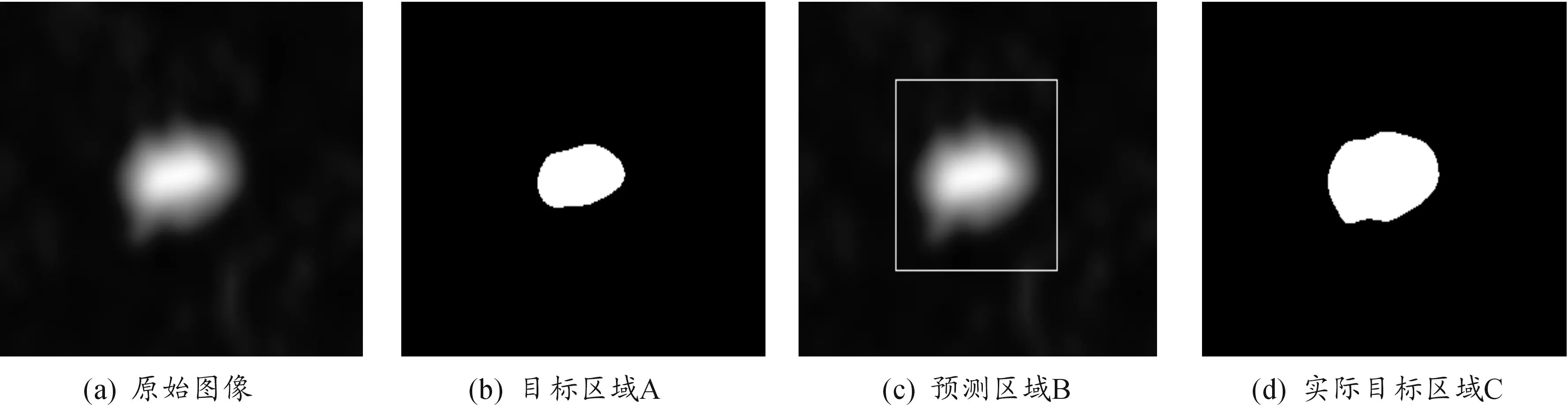
圖5 光團圖像判讀效果圖
4 結論
本文介紹了經緯儀圖像判讀的基本原理,論述了判讀同名點的確定原則,提供了利用經緯儀測角預測目標圖像位置的方法,分析了靶場不同典型目標的成像原理,并提出了相應的自動判讀方法。本文所提出方法是對各種氣象條件下跟蹤方法的適用性經過反復比較,長期測試的結果,具有定位精度高、算法簡單、判讀效率高,適用性強的特點,這些方法都已經在實際圖像處理工作中得到了充分應用,完成了大量圖像判讀工作。當然,限于文章篇幅的原因,每種方法都沒有介紹詳細的實現步驟,不過文章對于方法所用的原理已經指明了具體的參考文獻,實現起來應當比較容易。
[1] 蒲靜松,許東,劉乙君,等.星空背景下紅外弱小目標的快速檢測[J].激光與紅外,2017,47(4):513-517.
[2] 彭玉青,李木,高晴晴,等.基于動態模板匹配的移動機器人目標識別[J].傳感技術學報,2016,29(1):58-63.
[3] 孫丹丹,高教波,孫科峰.飛機及尾焰的紅外仿真[J].兵工自動化,2016.35(8):62-65.
[4] 李大成,楊曉東.一種圖像抖動下的目標位置測量方法[J].兵器裝備工程學報,2017,38(2):97-100.
[5] 郭曉沅,黃建祥.基于云重心判讀法的瞄準誤差影響度分析[J].彈箭與制導學報,2014,34(2):182-184.
[6] 郭鵬宇,丁少聞,田尊華,等.靶場光測圖像實時判讀系統設計與方法[J].國防科技大學學報,2014,36(2):168-174.
[7] 鐘權,周進,吳欽章,等.基于Hough 變換和邊緣灰度直方圖的直線跟蹤算法[J].光電工程,2014,41(3):89-93.
[8] 錢鋒,楊名宇,張曉沛.基于序列圖像提高光斑質心定位精度[J].光學精密工程,2016,24(11):2880-2887.
[9] 曹陽,李保權,李海濤,等.像素位置偏差對質心定位精度的影響[J].紅外與激光工程,2016,45(12):1217007-1-1217007-6.
[10] OTSU N.A Threshold Selection Method from gray-level histogram[J].IEEE Trans.,1979.SMC9(1):62-66.
[11] 徐火希.基于改進MeanShift的運動目標跟蹤算法[J].兵器裝備工程學報,2016,37(2):127-130.
[12] 陳金令,馮勝,李娜,等.空中目標的多模跟蹤算法研究[J].艦船電子工程,2015,256(10):51-54.
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
當代陜西(2020年14期)2021-01-08 09:30:42
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52
民生周刊(2012年10期)2012-10-14 09:06:46