海上風電起重船施工運動響應分析*
2018-02-27 08:19:24陳鵬飛吳加文楊浩淼張華柯逸思
風能 2018年12期
關鍵詞:施工
文 | 陳鵬飛,吳加文,楊浩淼,張華,柯逸思
全球能源變革正值起勢階段,開發海上風能資源成為推動能源轉型的重要舉措。我國海上風電產業處于起步階段,相較陸上風電而言,海上風電施工難度更大、風險更高。海上風電起重船是海上風電產業重要的施工裝備,在海上施工時因受到風、浪、流的聯合作用會產生一定的運動,當運動響應過大時,其施工安全性將難以保證。
國內外學者已經對處于施工狀態下的起重船進行了大量研究,勢流理論可在頻域范圍內求解起重船在規則波中的運動響應,然后通過線性系統的分析方法以及頻率特性得到脈沖響應函數并進行傅里葉變換,就可以得到起重船在規則或者不規則波下的時域運動響應,這也是當前研究船在波浪中運動響應的主要方法;除此之外,另一種更加準確的評估方法是進行模型試驗。在具體施工時,起重船應盡量避免長周期波浪,并且應盡量使船首迎浪,避免波浪橫向或斜向入射,從而保證起重船在施工時的運動較小;同時,起重船在進行起吊作業時應注意起吊速度和時間,盡量避開共振區,以免動力響應過大。
福建海域是我國海上風電重點建設區域,具有得天獨厚的風能資源條件。基于福建海域特定的施工環境條件對起重船在施工時的運動響應進行分析具有重要意義。然而,目前針對該海域復雜施工環境條件下的起重船運動響應研究卻相對較少。本文以作業于福建海域的某海上風電起重船為研究對象,分別在頻域和時域范圍內對其進行研究,以安全性為前提,確定其可施工環境條件,為福建海域海上施工提供參考依據。

圖1 錨鏈布置示意圖

表1 船型參數

表2 錨鏈參數
船型參數
本文所研究起重船最大起重能力3600t,配有4個主勾、2個輔勾;船舷外工作幅度42~46m,起升高度水上108m、水下10m。船型參數如表1所示。
起重船配備8個定位錨,船首和船尾兩側分別設置4個錨點,每個錨點連接兩個錨纜,兩個錨纜之間的夾角為30°,對稱布置,環境條件方向以及錨鏈布置如圖1所示。
錨鏈參數如表2所示。
計算理論
頻域分析中,基于三維勢流理論計算船體的附加質量、阻尼系數等水動力參數以及幅值響應算子(response amplitude operator, RAO)等。速度勢采用Green函數及邊界元方法求解。頻域中船體的運動方程可表示為:

式中,mij為質量矩陣;μij為附加質量矩陣;λij為阻尼系數;Cij為恢復力系數矩陣;為傅汝德-克雷洛夫力;為波浪繞射力;為幅值響應算子(RAO)。
在頻域計算的基礎上,基于卡明斯脈沖理論可求得船體在時域內受到的波浪力,再考慮風力、流力以及系泊約束力,就可以通過下述方程求得起重船在時域范圍內的運動響應,方程為:

式中,M為質量矩陣;A(∞)為頻率無窮大時的附加質量矩陣,K為靜水力回復矩陣;為延遲函數;F包括波浪力、風力、流力以及系泊約束力。
數值模型
基于DNV-GL開發的大型商用軟件Sesam進行數值分析,使用模塊包括GeniE、HydroD以及Simo。根據Sesam軟件各模塊的功能,首先在GeniE中建立起重船濕表面模型(如圖2);然后將濕表面模型導入HydroD中求解水動力參數;最后在Simo中導入HydroD計算出來的水動力參數,并建立懸鏈線系泊分析模型(如圖3),進行時域分析。
頻域運動響應分析
起重船在海上風電場進行施工時,自身具有較小的運動響應是安全作業的前提,這與起重船設計完成之后的水動力性能密切相關。縱蕩、橫蕩以及艏搖三個方向的自由度運動在很大程度上依賴于系泊系統的約束,而垂蕩、橫搖、縱搖三個方向的自由度運動受懸鏈線系泊系統影響較小,可在頻域范圍內分析。
一、 RAO結果分析
RAO反映的是起重船在不同浪向、不同周期下的運動性能,是分析起重船運動的基礎。RAO圖中的橫坐標表示波浪周期,縱坐標表示運動幅值。
(一)垂蕩運動RAO

圖2 起重船濕表面模型

圖3 懸鏈線系泊系統分析模型

圖4 垂蕩運動RAO曲線
根據圖4可知:
(1)垂蕩運動幅值隨著波浪周期的增大而增大,最后接近定值。
(2)不同浪向下垂蕩運動幅值不同,當波浪方向為90°時,垂蕩運動幅值最大。
福建海域平均波浪周期在8~12s之間,在此周期范圍內垂蕩運動幅值結果如表3所示。

圖5 橫搖運動RAO曲線

表3 波浪周期8~12s范圍內不同浪向垂蕩運動幅值(m)

表4 波浪周期8~12s范圍內不同浪向橫搖運動幅值(°)
根據表3,0°、30°、150°和180°浪向下的垂蕩運動響應較小,最大值不超過0.65m。當波浪方向為60°(或120°)時,最大值為0.87m,增幅33.8%;當波浪方向為90°時,最大值為0.99m,增幅52.3%。所以,較小的波浪入射角可以保證垂蕩運動在8~12s周期范圍內具有較小值,有利于海上施工。
(二)橫搖運動RAO
根據圖5可知:
(1)橫搖運動幅值隨著波浪周期的增大先增大后減小,當波浪周期為10s時幅值達到最大,此時波浪周期與起重船橫搖運動固有周期較為接近。
(2)不同浪向下橫搖運動幅值不同,當波浪方向為90°時,橫搖運動幅值最大。
在8~12s周期范圍內橫搖運動幅值結果如表4所示。
根據表4,0°、30°、150°和180°浪向下的橫搖運動響應較小,最大值接近0.82°,其中0°(或180°)浪向下橫搖運動接近零。當波浪方向為60°(或120°)時,最大值為2.8°,增大2.4倍;當波浪方向為90°時,最大值為4.5°,增大4.5倍。相比于垂蕩運動,較小的波浪入射角對改善橫搖運動效果更加明顯,尤其是0°或者180°,橫搖運動接近零。為最大限度地減少橫搖運動,應選擇船首迎浪施工。
(三)縱搖運動RAO
根據圖6可知:
(1)縱搖運動幅值隨著波浪周期的增大先增大后減小,當波浪周期為10s時幅值達到最大,此時波浪周期與起重船縱搖運動固有周期較為接近。
(2)不同浪向下縱搖運動幅值不同,當波浪方向為0°或180°時,縱搖運動幅值最大,接近1.8°。

圖6 縱搖運動RAO曲線
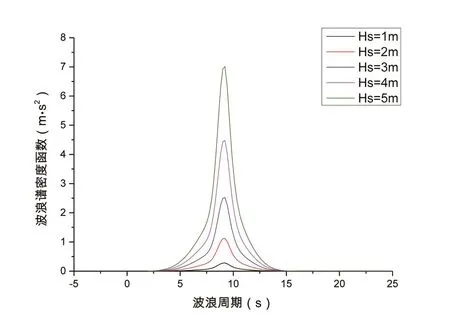
圖7 波浪譜密度函數

圖8 縱搖響應譜密度函數
二、 縱搖運動譜分析
為了研究船首迎浪施工時的縱搖運動,可對其進行譜分析。在我國沿海區域,波浪譜通常推薦采用Jonswap譜,公式如下:

式中,Swω為波浪譜密度函數,Hs為波浪的有義波高,Tp為譜峰周期,ω為波浪頻率,γ為譜峰因子,σ為形狀函數。
根據譜分析法計算原理,可以認為運動譜等于海浪譜乘以響應幅值算子(RAO),即:

式中,Srω為運動響應譜,Swω為海浪譜,為幅值響應算子(RAO)。
取有義波高Hs為1m、2m、3m、4m以及5m,譜峰周期Tp為10s進行譜分析,波浪譜密度函數Swω如圖7所示。
根據縱搖運動RAO以及公式(5),可得到縱搖運動響應譜Srω結果,如圖8所示。
通常認為3小時內的海況保持不變,并且滿足瑞利分布。對縱搖運動響應譜密度函數(圖8)進行3小時統計分析,就可以對起重船進行短期預報,結果如表5所示。
起重船的重心位于船中,縱傾時船首垂向下降高度可按下式計算:

式中,L表示船長,θ表示縱傾角。
根據表5的結果可知,當有義波高為4m時,最大縱搖角為4.39°,此時船首垂向高度h為4.5m,大于整個起重船干舷高度4.2m,即甲板已經入水;當有義波高為3m時,最大縱搖角3.29°,此時船首垂向下降高度h為3.45m,甲板距離水面較近,也不利于海上施工。
因此,根據譜分析預報結果,當波浪周期在10s附近時,起重船可作業有義波高盡量不要超過2m。
時域耦合運動響應分析
考慮到起重船和系泊系統之間的耦合作用,尤其是縱蕩、橫蕩以及艏搖運動受系泊系統影響較大,在頻域范圍內分析難以得到比較滿意的結果。因此,需要借助時域耦合分析技術,在確定的時間域內對起重船進行運動響應分析,以此得到起重船在某一時刻以后若干秒內確定的運動狀態。
頻域分析是時域分析的基礎,基于頻域計算結果,采用頻域轉時域的計算方法,在確定的風、浪、流環境條件下,對起重船進行時域耦合運動響應分析,得到起重船在實際海域的運動時間歷程和統計值。

表5 縱搖運動響應譜特征參數及短期預報值

表6 時域分析環境條件

表7 組合工況

表8 不同工況下起重船六自由度運動量統計值

圖9 Case2工況縱蕩運動時程曲線

圖10 Case2工況縱搖運動時程曲線
一、 環境條件和組合工況
根據譜分析預報結果,當波浪周期在10s附近時,為了避免在施工過程中出現較大的縱搖角,有義波高不得超過2m。計算時,波浪方向保持180°(船首迎浪方向)不變,改變風和流的方向,風、流與波浪夾角組合參考DNV-GL系泊定位規范,環境條件和工況設置如表6和表7所示。
二、 結果分析
不同工況下,起重船六自由度運動量統計值如表8所示:
(1)Case2工況下起重船整體運動量較大,這表明風、流、浪不同方向作用時可能產生最大運動。
(2) 三種工況下縱搖運動最大絕對值為2.18°,與譜分析的結果基本一致。
(3)對于處于系泊狀態的起重船而言,比較關注的是縱蕩運動。三種工況下,Case2工況下縱蕩運動最大,最大絕對值為2.6m,小于水深的10%(5m)。API規范要求浮體在系泊時的最大偏移量不得超過水深的10%,說明系泊系統對起重船的約束較為理想。
以Case2工況作為示意,給出起重船在實際海域、確定的環境條件下縱搖和縱蕩運動時程如圖9和圖10所示。相比于頻域計算結果,時域計算結果更加直觀,可直接得到起重船各自由度和各時刻確定的運動值。時域分析結果表明,起重船可安全施工。
結論
本文以作業在福建海域海上風電場的一艘起重船為例,對其在頻域和時域范圍內運動響應進行分析,得到以下結論:
(1)在頻域范圍內分析其橫搖、縱搖和垂蕩運動響應,得到較小的波浪入射角有利于起重船施工操作的安全性。
(2)在頻域分析的基礎上,通過譜分析預報縱搖運動響應,確定了起重船在福建海域可作業環境條件,最大有義波高2m。
(3)頻域分析和譜分析可較好預報起重船橫搖、縱搖和垂蕩運動,但無法準確預報處于系泊狀態下起重船橫蕩、縱蕩和艏搖運動,因此,需借助時域耦合分析法。在譜分析確定的環境條件下,在時域范圍內分析起重船全部六自由度運動,得到其縱蕩運動最大絕對值不超過2.6m,橫蕩運動最大絕對值不超過0.82m,均小于水深的10%,滿足API規范要求,說明該環境條件下,起重船可安全施工。
猜你喜歡
建材發展導向(2022年18期)2022-09-22 07:13:20
建材發展導向(2022年12期)2022-08-19 02:33:10
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年22期)2022-01-18 06:12:46
建材發展導向(2021年19期)2021-12-06 03:20:50
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年12期)2021-07-22 08:06:58
建材發展導向(2021年9期)2021-07-16 07:11:36
上海建材(2017年4期)2017-10-16 01:33:34
中國房地產業(2016年2期)2016-03-01 01:25:48