基于點云投影的瓷磚凸包特征點檢測
2018-02-27 05:16:48任志奇
陶瓷學報 2018年6期
趙 謙,任志奇
(西安科技大學 通信與信息工程學院,陜西 西安 710054)
0 引 言
隨著國家經濟的飛速發展,市場對瓷磚質量提出了嚴苛的標準。由于瓷磚生產工藝特殊,批量生產時質量難以保證的特點,因此對瓷磚進行無損平整度檢測具有重大意義。目前絕大多數企業的瓷磚平整度檢測主要依靠人工,存在檢測效率低,工作強度大,質量不穩定,漏檢率高等問題[1]。
近幾年3D掃描技術的發展日益成熟,這為瓷磚檢測帶來了新的技術手段[2]。目前瓷磚平整度檢測設備主要采用激光位移傳感器[3-5]來獲取瓷磚特征點信息,也有一些采用容柵位移傳感器[6]、光纖位移傳感器[7]、PSD傳感器[8]等等。這些設備檢測精度高、速度快,但造價昂貴、裝置復雜、維護成本高。而3D掃描儀體積輕便、裝置簡單、掃描精度高,可在極短時間內快速獲取物面三維點云,將其用于瓷磚平整度檢測是可行的。由于瓷磚點云離散無序,瓷磚平整度檢測所需的特征點位置未知。為此本文提出一種基于點云投影的瓷磚凸包特征點檢測算法,可從瓷磚點云中自動快速提取瓷磚特征點坐標。
1 系統簡介
實驗所采用的3D掃描系統為光軸交叉型光路結構,如圖1所示,P為結構光場的投影系統(Projector),成像系統(Camera)為接受變形光柵像的面陣探測器,本系統采用CCD(Charge-Coupled Device,電荷耦合元件)攝像機。投影系統的光軸PO和成像系統的光軸CO相交于參考平面(Reference Plane)上的O點,參考平面與成像系統的光軸垂直。光柵像被投影系統投影到待測物體表面,A和B是參考平面上的點,H是物面的被測點,由于受到物體高度分布h(x, y)的空間調制,觀察系統將得到攜帶有物體高度分布信息的變形光柵像。L是成像系統出瞳到參考平面的距離,d是成像系統與投影系統之間的距離。
系統由信息采集模塊和計算模塊組成,如圖2所示。信息采集模塊主要由投影儀(Projector)向待測物體表面投射三頻彩色光柵(Three-Frequency Color Grating),用彩色CCD獲取彩色條紋變形圖,作為算法模塊的輸入。算法模塊則通過條紋變形圖解調出條紋圖的相位信息,進一步重建出掃描對象的三維信息。系統采用彩色條紋投影與立體視覺融合的三維傳感方法,以測量復雜動態物體(Dynamic Object)。其基礎原理是一種雙向融合機制,即先用三頻彩色條紋的相位分布指導雙目立體視覺全局匹配,反過來,再利用雙目條紋灰度圖局部多特征的精細匹配校正初始相位失真,這種失真來源于反射率噪聲、形狀突變以及條紋的非正弦性,最終用立體視覺求解空間點位置坐標。

圖1 3D掃描系統光路原理圖Fig.1 Optical path schematic of 3D scanning system
2 算法描述
2.1 瓷磚平整度
中華人民共和國國家標準《GB/T 3810.2-2016》(《瓷磚試驗方法 第2部分:尺寸和表面質量的檢驗》)對瓷磚平整度的定義如下。
中心彎曲度:磚面的中心點偏離由4個角點中的3點所確定的平面的距離[9]。
邊彎曲度:磚一條邊的中點偏離由4個角點中的3點所確定的平面的距離[9]。
翹曲度:由磚的3個角點確定一個平面,第4角點偏離該平面的距離[9]。
實際應用中,邊彎曲度的計算與國家標準略有不同。通常做法是取瓷磚一邊上的3個四等分點(也稱邊特征點),分別計算這3個點到任意3個角點所確定平面的距離,然后取最大值作為該邊的邊彎曲度。可見瓷磚平整度檢測的關鍵是獲取瓷磚平面的3類特征點坐標:4個角點、12個邊特征點、1個中心點。
2.2 凸包算法
瓷磚特征點中最重要的是對瓷磚4個角點的檢測,為此引入計算幾何中的凸包模型來對角點進行描述。凸集是理解凸包的前提,凸集的定義如下:假設在平面上有非空點集S,在S中任取兩點p1,p2,如果點p=tp1+ (1-t)p2∈S,其中,0≤t≤1,則稱是S凸集。換言之,如果S中任意兩點所連線段全部位于S之中,那么S就是凸集,顯然,帶有“凹部”的任何平面點集都不是凸集。在凸集的基礎上,凸包定義為包含平面點集S的最小凸集,關于凸包可以這樣想象:在地面上固定若干木樁,用根繩子將這些木樁盡量緊地圈起來,所形成的凸多邊形就是凸包。圖3和圖4展示了瓷磚點云的三維凸包模型以及點云投影的二維凸包模型,這兩個模型是后面兩個瓷磚特征點檢測算法的基礎。
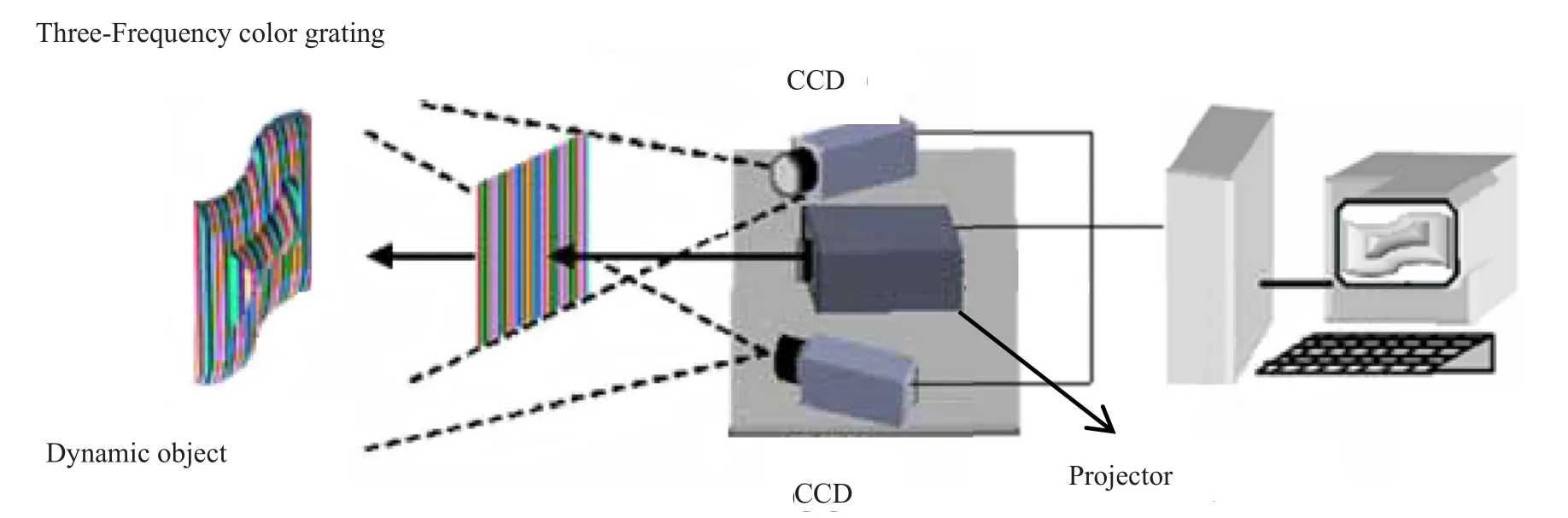
圖2 彩色條紋投影與雙目立體視覺融合3D掃描系統Fig.2 3D scanning system with color fringe projection and binocular stereo vision fusion
目前求解凸包的算法有卷包裹法、Graham方法以及分治算法等等,而Graham方法是求解平面點集凸包問題的最佳算法[10],故重點介紹Graham方法,其步驟如下:

圖3 瓷磚點云三維凸包Fig.3 Tile point cloud three-dimensional convex hul

圖4 瓷磚點云投影凸包Fig.4 Tile point cloud projection convex hull
(1)設凸集中y坐標最小的點為p1,如果有多個y坐標最小點,則以x坐標最小的點為p1。將p1與凸集中其它各點用線段連接,然后計算各線段與水平線的夾角,并按夾角大小以及到p1的距離進行詞典式分類,得到序列p1, p2, p3, …, pn,用線段依次連接這些點,得到一個多邊形。p1是凸包邊界的起點,p2與pn也必是凸包頂點。pn+1=pn,如圖5所示。
(a)根據各點傾角大小以及到p1的距離進行詞典式分類
(b)以p1為起點,逆時針連線成一多邊形
(d)原p4成為p3,p1和p4在同側,p3暫時在邊界上,繼續查下去
(e)最后得到凸包的6個頂點
(2)刪去p3, p4, …, pn-1, 中不是凸包頂點的點,方法如下:
步驟1:k←4;
步驟2:j←2;
步驟3:如果p1和pk分別在兩側,則刪去pk-1,后繼頂點編號減1,k←k- 1,j←j- 1;否則pk-1暫為凸包頂點,并記錄;
步驟4:j←j + 1,轉至步驟3,直至j←k-1;
步驟5:k←k + 1,轉至步驟2,直至k←n + 1。
(3)順序輸出凸包頂點。
2.3 瓷磚特征點檢測算法
假設瓷磚表面點云為P(x, y, z),Pxy(x, y)為點云投影,瓷磚點云數為n。令角點D4={d1, d2, d3, d4},邊特征點B4={d1i, d2i, d3i, d4i}, (i=1, 2, 3),中心點0xy。令角點投影D4xy={d1xy, d2xy, d3xy, d4xy},邊特征點投影B4xy={b1ixy, b2ixy, b3ixy, b4ixy},(i=1, 2, 3),中心點投影Oxy。根據作用域的不同,瓷磚特征點檢測可分為直接檢測與間接檢測兩種。前者直接在三維點云中尋找特征點坐標,后者先將三維點云映射至二維平面,在該平面檢測特征點投影,最后將特征點投影反映射至三維點云空間,即可得到瓷磚真實的特征點坐標。

圖5 Graham方法的解釋Fig.5 Interpretation of the Graham method
2.3.1 算法1:直接檢測算法
第一步:角點估計
獲取P(x,y,z)的凸包,記凸包頂點集合為T(x,y,z);
計算T(x,y,z)內各點之間的距離,距離最大的兩個點記為角點d1、d3;
過d1、d3構造直線L13,滿足L13(x, y, z) ≥ 0的部分記為T1(x, y, z),滿足L13(x, y, z)<0的部分記為T2(x, y, z);
計算T1(x, y, z)內各點到直線L13的距離,距離最大的點為角點d2;
計算T2(x, y, z)內各點到直線L13的距離,距離最大的點為角點d4。
第二步:邊特征點估計
以角點d1、d2所在邊的四等分點b1i,(i=1, 2, 3)為例,假設第一步所求d1、d2的坐標分別為d1(x1, y1, z1)和d2(x2, y2, z2),則b1i坐標計算過程如下:
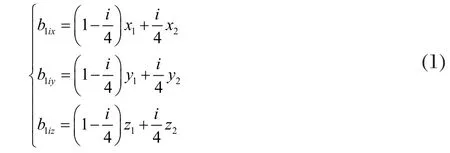
其中,i=1, 2, 3,表示3個四等分點;
若b1i在P(x, y, z)中,則b1i為所求的四等分點,否則以距b1i最近的點為四等分點b1i(注意:本段及論文后面的“距某點最近的點”可由K最近鄰(K-Nearest Neighbor,KNN)算法實現,KNN是機器學習的基本算法);
同理可得其它三組四等分點b2i、b3i、b4i。第三步:中心點估計記O'(xavg , yavg , zavg),

若O'在P(x, y, z)中,則O'為中心點O,否則以距O'最近的點為中心點O。
2.3.2 算法2:點云投影檢測算法第一步:角點投影估計
獲取Pxy(x, y)的凸包,記凸包頂點集合為T(x, y);
計算T(x, y)內各點之間的距離,距離最大的兩個點記為角點投影d1xy、d3xy;
過d1xy、d2xy構造直線L13,滿足L13(x, y, z) ≥ 0的部分記為T1(x, y),滿足L13(x, y, z)<0的部分記為T2(x, y);
計算T1(x, y)內各點到直線L13的距離,距離最大的點為角點投影d2xy;
計算T2(x, y)內各點到直線L13的距離,距離最大的點為角點投影d4xy;
第二步:邊四等分點投影估計
以角點投影d1xy、d2xy所在邊的四等分點投影b1ixy,(i=1, 2, 3)為例,假設第一步所求d1xy、d2xy的坐標分別為d1xy(x1xy,y1xy)和d2xy(x2xy,y2xy),則b1ixy坐標計算如下:
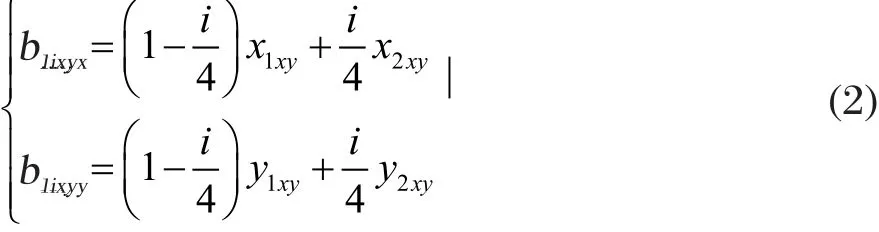
其中i=1, 2, 3,表示3個四等分點投影;
若b1ixy在Pxy(x, y)中,則b1ixy為所求的四等分點投影,否則以距b1ixy最近的點為四等分點投影b1ixy;
同理可得其它三組四等分點投影b2ixy、b3ixy、b4ixy。第三步:中心點投影估計
記O'(xavg ,yavg ,zavg ),其中

若O'在Pxy(x, y)中,則O'xy為中心點投影Oxy,否則以距O'xy最近的點為中心點投影Oxy。第四步:點云投影特征點映射
根據P(x, y, z)到Pxy(x, y)的映射關系,將上述特征點投影進行3D映射,即:
3 算法仿真
3.1 實驗環境(見表1)

表1 實驗環境Tab.1 Experimental environment
3.2 仿真結果與分析
3D掃描系統對圖6所示的白色光面瓷磚(300*300 mm)進行掃描,獲得瓷磚表面密集點云,點云數達100000,為強化視覺效果,對該點云進行抽樣,使其點云數降至10000,作為后面顯示瓷磚特征點的背景點云。分別見圖7、圖8。
用算法1和算法2分別提取瓷磚特征點,提取效果如圖9、圖10所示,特征點坐標數據如表2、表3所示。

圖6 白色光面瓷磚Fig.6 White glossy tiles
觀察表2和表3,發現算法1與算法2分別獲取的特征點坐標有細微差異,這是因為算法1和算法2的作用空間不同,前者是在三維空間(空間點云),后者是在二維空間(點云投影)。根據空間點及其投影關系易知,三維空間距離最大的兩個點,在二維平面上的投影距離未必最大(可以想象這樣一個場景,在桌面上豎立一支鉛筆,筆頭和筆尾距離最長,但筆頭與筆尾的投影在筆尾處重合,其投影點的距離為零),所以算法1所得凸包中的d1、d3和算法2凸包中的d1xy、d3xy不一定滿足fpxy→p映射關系,其余特征點情況類似。由前面鉛筆的例子可以發現,如果點云數據本身存在干擾點(在z軸方向上距離點云平面偏大的點),算法1有可能會得到錯誤的結果,而算法2則不然,其點云投影以及反映射的處理過程使其可以排除Z軸方向上的干擾點,這也表明算法2的抗干擾性要強于算法1。
為形象比較算法1和算法2所得瓷磚特征點坐標的差異,下面給出兩組坐標在x、y、z三個坐標軸上的差異圖及其相關圖(相關圖上的點越逼近直線,證明其相關程度或相似度越高)。需要說明的是,由于兩組坐標過于相似,為增強顯示效果,在顯示算法2所得坐標時,統一將其下移3個單位,顯示效果如下。
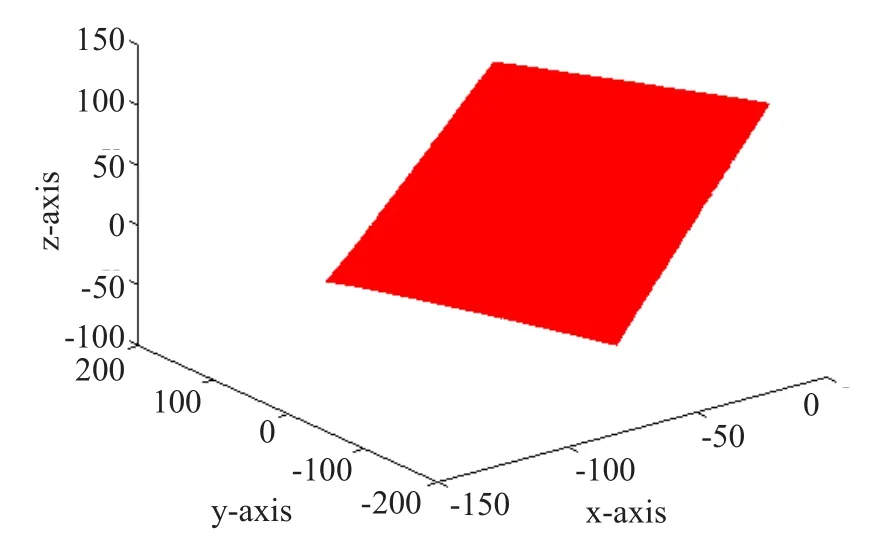
圖7 瓷磚表面點云(點云數:100000)Fig.7 Tile surface point cloud (Point cloud number: 100000)
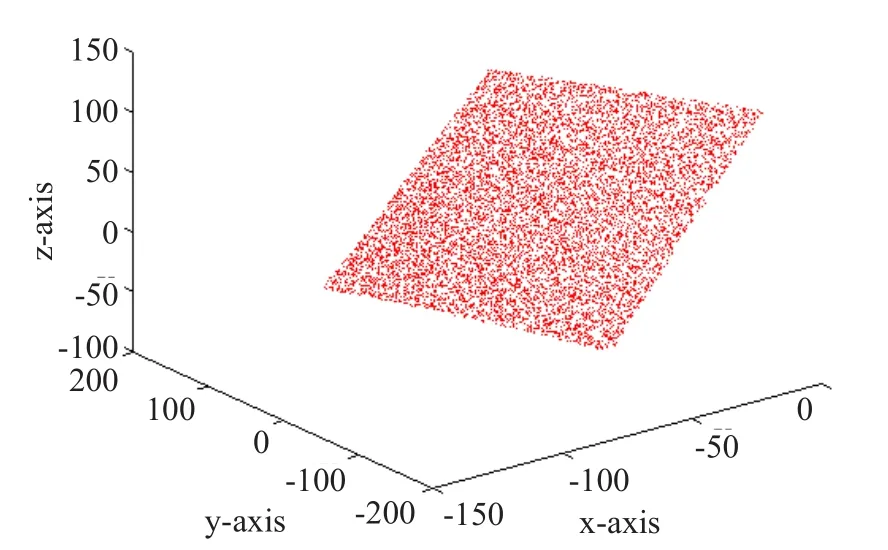
圖8 瓷磚表面點云(點云數:10000)Fig.8 Tile surface point cloud (Point cloud number: 10000)
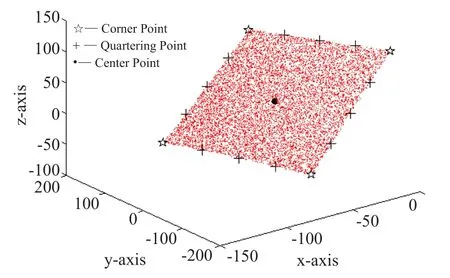
圖9 算法1所得瓷磚特征點Fig.9 Tile feature points resulting from Algorithm 1

圖10 算法2所得瓷磚特征點Fig.10 Tile feature points resulting from Algorithm 2
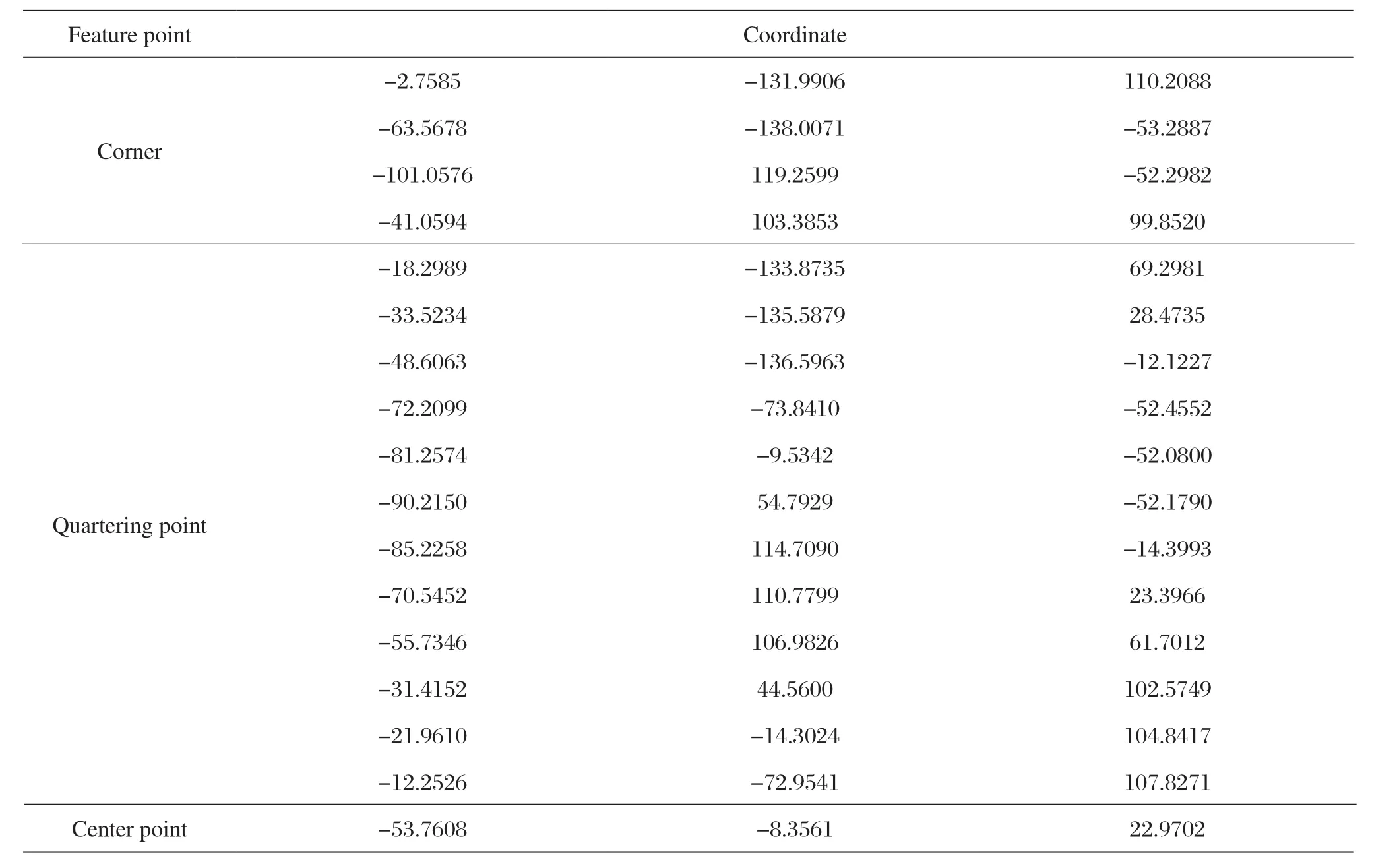
表2 算法1檢測的瓷磚特征點坐標Tab.2 Tile feature point coordinates detected by Algorithm 1

表3 算法2檢測的瓷磚特征點坐標Tab.3 Tile feature point coordinates detected by Algorithm 2
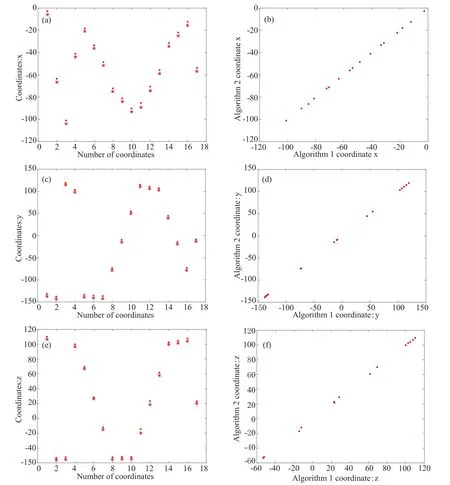
圖11 算法1、算法2所得瓷磚特征點坐標示意圖及相關圖(圖(a)(b)(e)標記點說明:‘.’算法1特征點坐標;‘*’算法2特征點坐標)Figure.11 Schematic diagrams for detection of tile feature point coordinates by Algorithm 1 and algorithm 2(Marking points in (a)(b)(e): ‘.’ Algorithm 1 detected feature point coordinates; ‘*’ Algorithm 2 detected feature point coordinates)
由于本實驗3D掃描系統的高精度性能,算法1與算法2所得瓷磚特征點坐標誤差極小。從瓷磚特征點坐標相關圖(圖11(b)、(d)、(f))可以看到,兩組特征點坐標的x、y、z坐標相關圖呈線性分布,證明兩組坐標相關度極高。用MATLAB自帶的corr2()函數比較兩組坐標數據的相似度,其x坐標相似度為0.9999,y坐標相似度為1.0000,z坐標相似度為0.9999,總體相似度為1.0000,驗證了我們的判斷。
下面比較算法1與算法2的執行效率,分別統計二者各運行10次的時間,如表4所示。
由上表可以看到算法2比算法1的運行效率更高。這是由于算法1直接在三維空間中尋找凸包,而瓷磚點云不一定全部處于同一平面,此時多個凸包頂點存在交叉,而算法2不存在這個問題。理論上二維空間點集的凸包頂點數滿足三維空間點集的凸包定點數滿足n為100000時二者比值為6.81。本實驗中算法1所得三維凸包頂點數高達360,去掉重復點為119,算法2為20,二者比值為5.95,與理論值6.81相比這個數值是合理的。很容易理解,凸包頂點數越多算法的運行時間也就越長,在這里近似認為算法運行時間與凸包定點數呈正相關,由于算法2有一個從二維到三維的反映射過程,因此算法2與算法1的運行時間比值要小于5.95,而實際比值為3.28,故算法2的運行效率是算法1的3倍以上是合理的。
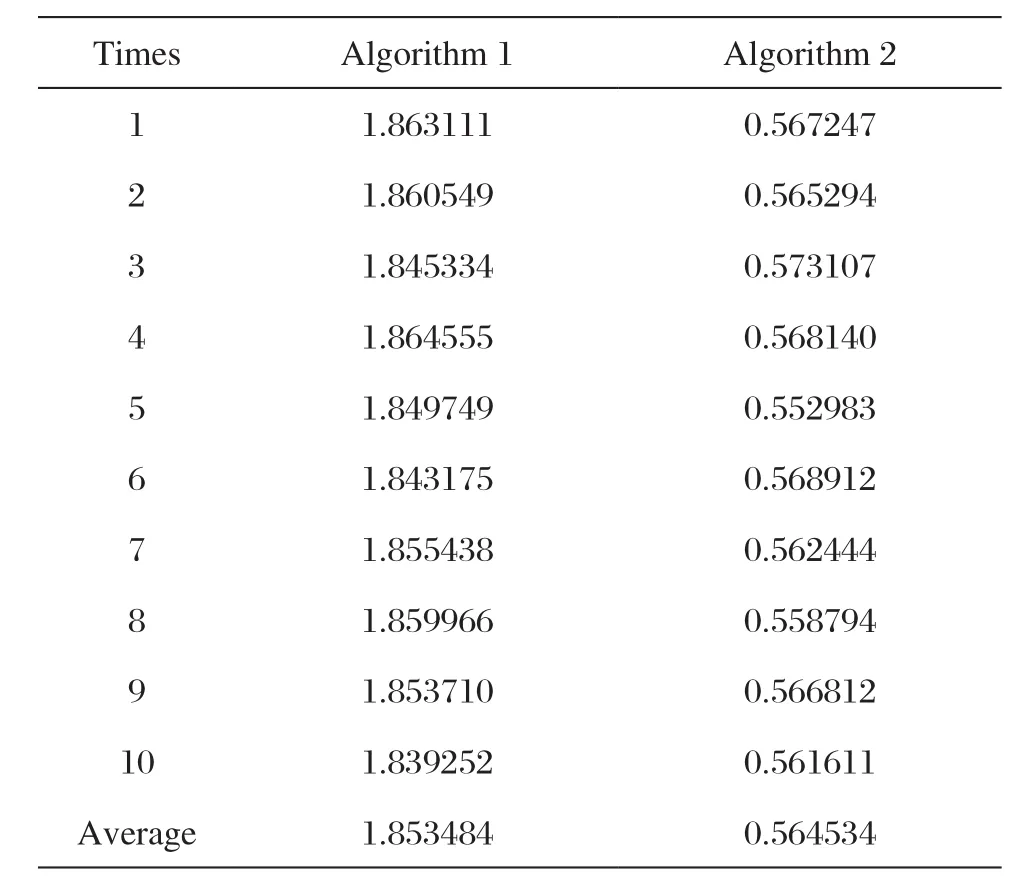
表4 算法執行時間(單位:秒)Tab.4 Algorithm running time (Unit: second)
4 結 論
本文將3D掃描技術用于瓷磚平整度檢測領域,并提出了一種基于點云投影的瓷磚凸包特征點檢測算法。算法創造性地將三維空間中特征點的檢測轉換為在二維空間中對其特征點投影的檢測,極大提高了算法執行效率。實驗證明,本文提出的點云投影檢測算法性能明顯優于直接檢測算法,不僅具備一定的抗噪能力,而且執行效率較高,0.6秒內便可完成瓷磚特征點的提取,這對3D掃描儀應用于瓷磚平整度檢測實現自動化、高效化具有重要意義。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54