一種電動舵機模擬控制器設計
2018-02-26 12:23:22龍海峰張巍何雨昂曹英健
電子技術與軟件工程 2018年17期
龍海峰 張巍 何雨昂 曹英健
摘要
本文介紹了一種電動舵機模擬控制器的原理、功能組成以及小型化設計方法,分析了控制電路和驅動電路結構,該模擬控制器具備良好的性能和較高的可靠性,探討了模擬控制器在電動伺服控制領域的應用前景。
【關鍵詞】電動舵機 控制器 電動伺服
1 概述
目前,在中小功率電動舵機控制器產品中,模擬控制器以其自身的優點在市場競爭中占有一席之地,研制一種體積小、成本低、可靠性和可維護性好的電動舵機模擬控制器具有極高的實用價值。本文介紹的電動舵機模擬控制器具有以下特點:
(1)采用以電機控制專用集成電路MC33035和集成運算放大器MC33179為核心的模擬控制電路,在滿足系統要求的情況下,大幅降低了設計成本和電路復雜程度,又節省了空間。
(2)采用P型和N型MOSFET相結合的H橋驅動模式,在保證可靠驅動的基礎上節省了光電耦合器及其相應的電源變換電路,這使得控制器所占用的空間進一步減小。
(3)模擬控制電路采用集成貼片元件,有效地減小了電動舵機控制器的重量和安裝體積。
2 模擬控制器原理及設計
2.1 控制原理
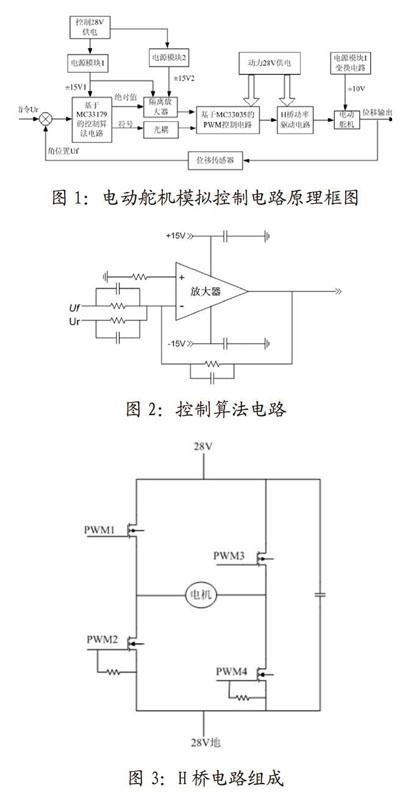
為了提高電動舵機的可靠性和響應性能,舵機控制電路通過一個精密反饋電位計構成閉環控制。控制器接受上級控制系統指令電壓信號Ur,舵擺角位置與電位計輸出的電壓信號Uf成正比,經過運算放大器的算法電路形成一比較電平,以此作為指令信號送入MC33035,該芯片輸出一定占空比的PWM信號,控制功率電路中MOSFET的導通和關斷,從而實現對舵機的閉環控制。電動舵機模擬控制器的控制原理如圖1所示。
2.2 算法控制電路設計
指令信號與反饋信號通過運算放大器求和后進行比例放大運算。具體實現電路如圖2所示。
PWM控制芯片MC33035要根據ERA+管腳指令電壓信號的大小來控制PWM波的占空比,指令電壓信號必須為正值;根據FWD/RV管腳的電壓信號來確定電機的正反轉方向,高電平時電機正轉,低電平時電機反轉。因此,在控制算法電路中設計了相應的絕對值電路和符號電路,使MC33035芯片能夠按照指令產生PWM波形,控制電機的運行。為了有效減小控制算法電路硬件所占用的空間,選用了四個運算放大器集成于一體的芯片MC33179。
2.3 PWM控制電路設計
MC33035是專門針對電機控制而設計的專用集成電路,內含誤差放大器、三角波放大器、脈寬調制器、輸出驅動門、限流電路、欠壓封鎖電路等。MC33035共可輸出六路PWM信號,本系統采用其中的四路。控制芯片通過運算放大器的模擬電壓輸出與三角波相比較,從而產生一定占空比的PWM波,其占空比大小與指令電壓成正比,伺服電機的方向控制通過FWD/RV管腳來實現。
2.4 功率電路設計
功率器件是模擬控制器中的關鍵器件之一,也是整個控制系統中容易損壞的元器件。在此選用IR公司的MOSFET,由IRF4905和IRFZ48N組成H橋電路,通過加入C型緩沖電路,可用于吸收浪涌電壓。由MOSFET組成的H橋電路如圖3所示。
3 小型化設計
為了盡可能減小模擬控制器的體積,在設計過程中采取以下措施:
(1)采用電機控制專用集成電路MC33035,可以輸出六路占空比可調的 PWM控制信號。采用DSP或單片機的數字控制器外圍電路復雜,設計成本相對較高,而且硬件電路占用空間較大。
(2)在模擬式控制器的控制算法電路中,需要四路運算放大器。在設計中選用四運放集成的MC33179,使硬件電路的空間得到了充分優化。
(3)采用P型和N型MOSFET構成的H橋驅動方式,減小了控制電路所占用的空間。
(4)模擬控制器中的絕大部分元器件都采用表帖式封裝,在保證性能的前提下使空間減小到最低的限度。
4 試驗結果
模擬控制器帶舵機負載進行了跟隨特性、幅頻特性和相頻特性測試,其指標滿足系統要求,并且解決了以往控制器相角滯后過大的問題。
5 結論
采用該模擬控制器的電動舵機,工作性能良好,能夠較好滿足設計要求。與一般的數字式電動舵機控制器相比,所占用的空間體積小,設計和生產成本較低,且使用方便、可維護性好。模擬式電動舵機控制器通用性較強,可進一步擴展到其它伺服領域,應用前景良好。
參考文獻
[1]薛安克,彭冬亮,陳雪亭.自動控制原理[M].西安電子科技大學出版社,2004(06).
[2]陳隆昌,閻治安,劉新正.控制電機[M].西安電子科技大學出版社,2000(05).
[3]李成,鄒建華.基于MC33035的小功率無刷電機PWM系統[J].電氣傳動自動化,2000,22(06):13-15.