當前工業機器人應用中的機械結構設計方法分析
2018-02-20 06:26:52趙源
現代制造技術與裝備 2018年12期
趙 源
(徐州華潤電力有限公司,徐州 221000)
1 工業機器人機械結構設計原則
在工業機器人機械結構設計過程中,要結合實際問題建立健全的、統籌性較好的處理機制,按照標準化流程完善信息處理效果,確保設計能夠滿足預期。
1.1 最小慣量原則
相關人員在對零部件活動結構予以分析過程中,慣性沖擊問題較為嚴重,設計過程要結合最小慣量原則,確保工業機器人平穩程度滿足預期,且能有效減少運動末端誤差問題。需要注意的是,在設計過程中要減少運動部件實際重量,確保運動連桿重心能最大程度接近轉軸結構。
1.2 設計尺寸最優化原則
在工業機器人機械結構設計過程中,設計人員要結合設計要求對零部件進行綜合分析,無論是尺寸還是結構,都要滿足實際應用需求,建立零部件管控機制和運維管理體系,在尺度選擇方面要保證更小,且能提升精密性。另外要選擇強度較好的材料,集中維護最小慣量和最優尺度管理效率,輔助機器人克服峰值力矩造成的影響。
1.3 可靠性原則
在工業機器人機械結構設計過程中,相關人員要建立健全完整的可靠性測試體系,對相關問題進行集中預估,結合實際運行質量和運行需求建構系統化修正方案,保證機器人使用管理工作基本效率。在機器人應用過程中,要保證軟件處理工序合理性,并在機器人經過調試后完成管理[1]。
除此之外,也要秉持工藝性原則、高剛度設計原則等,確保工業機器人機械結構設計工作能滿足質量標準要求,提高工業機器人實際應用效率。
2 工業機器人機械結構設計方法
2.1 明確工業機器人機械結構設計任務
為了保證工業機器人機械結構設計工作質量,在設計工作前應明確相應工作任務,建立相應的控制流程,針對設計目的和設計方案予以針對性管理,確保不同功能的機器人都能按照差異化要點和標準完成基礎設計工作。
2.2 整合工業機器人機械手臂運動學計算
對于工業機器人機械結構設計工作而言,機械手臂運動學管理和參數判定十分關鍵。
首先要對機械臂姿態進行計算,在三自由機械臂中,第1個關節繞Z軸進行旋轉,其實際運動過程對于平面內軌道運行并不會產生影響,因此,將其化簡為2自由度機械臂運行軌跡,如圖1所示。
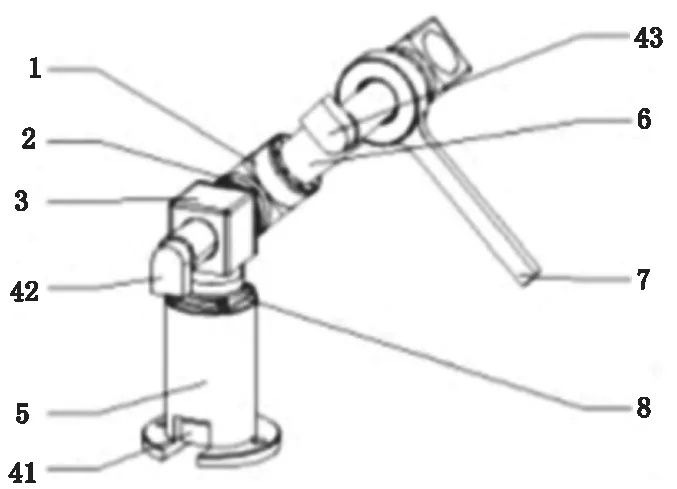
圖1 機械臂整體結構示意圖
結合圖1,若是將D-H作為坐標,則機械運動仿真就要設定L2和L3等單位長度,并且保證末端執行器的位置和姿態都能得到約束,依據矩陣分析如下要素:
(1)對應矩陣元素為(1,1)相等關系時,得出相應等式如式(1)所示。

(2)對應矩陣元素為(1,4)相等關系時,得出相應等式如式(2)所示。

(3)對應矩陣元素為(2,4)相等關系時,得出相應等式如式(3)所示。

依據相關數據可知,式(2)是未知數狀態,若依據傳統解法不能有效解決相關問題,就要借助Matlab聯合Solve函數進行求解。最終能計算出實數解能維護數據的連續性,剔除結果中的零解就能對x2和x3進行結果的存儲。
其次,對機械臂關節參數進行數據處理,應用方程進行擬合處理和操作,確保能維護數據,將其應用在統一周期內,結合關聯數據利用Adams軟件進行關節驅動變化展開綜合分析[2]。
2.3 優化設計流程
在工業機器人結構設計工作中,要確定臂長后對其進行優化處理,在最小工作空間范圍內提升操作效果,維護機械結構設計實效性。另外,要對主體結構進行綜合設計,完善負載慣量估算過程,對驅動力矩予以詳細判定,并進行集中優化驅動部件選型工作,完善傳動裝置設計效果,按照電氣布線和電氣接口設計要點提升實際效率。
最后要進行設計產品精度和出圖管理,秉持精細化管理機制,對產品精度進行全面分析,有效整合不同零部件尺寸結構,按照標準化設計要求對機器人樣品進行加工生產管理,保證生產改進機制能發揮實際價值[3]。
3 結語
在工業機器人結構設計過程中,要按照標準化設計原則有序開展相應工作,完善處理機制,提升管理工作科學性和綜合水平,全面處理樣品生產中存在的問題,提高設計工作應用價值,有效促進工業機器人機械結構設計工作。
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2021年13期)2021-07-28 07:15:50
當代工人(2020年8期)2020-05-25 09:07:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09
中國房地產業(2016年2期)2016-03-01 01:25:23
中國房地產業(2016年24期)2016-02-16 06:10:22
