組合式智能搬運車的設計
2018-02-20 06:26:48魏勝程王文博
現代制造技術與裝備 2018年12期
蔣 勇 王 強 魏勝程 王文博
(南京理工大學泰州科技學院智能制造學院,泰州225300)
目前快遞分揀大多數采用人工或者利用單一機器進行分揀,工作效率低下,并且難以對現代種類繁多貨物進行分揀運輸。目前,快遞行業只能按貨物尺寸將之分類至不同倉庫,并以不同方式進行分揀搬運,不僅工作量具大了,而且還需要更大面積的倉庫。因此組合式智能搬運車的設計,具有重要意義。
1 系統組成和工作原理
本文所設計的組合式智能搬運車三維設計效果如圖1所示,主要由電源、控制系統、激光發射器、接收器、驅動電機、車輪、轉盤鏈接機構和雙驅動輪雙萬向輪等結構組成。整個系統初步設計方案由四個可獨立工作的搬運小車組成,每個搬運車都帶有激光發射器和接收器,用于兩兩之間識別對接;對接過程中,利用轉盤鏈接機構可保證驅動輪不動,實現平臺轉動;對接完成后,兩車由電磁鐵相連接。搬運車采用方形外觀設計,載物面積大、實用性強、便于貨物運輸,能夠滿足多個搬運車對接需求。

圖1 整車三維設計效果
2 系統結構設計
根據理論知識以及試驗數據分析計算,進行模擬仿真,設計了車體、轉盤鏈接機構以及雙驅動輪雙萬向輪。車體由上、下兩部分組成,如圖2所示。上半部主要由機體,小車外殼等部件組成,此外還包括電源、中央控制芯片、電機驅動模塊以及降壓模塊等部件。另外,用于與其他小車對接的激光發射器及接收器裝在外殼側板處,便于 實現對接及修正;
下半部分為動力系統,由驅動電機及車輪組成。
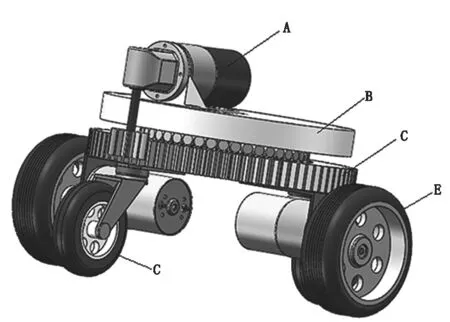
圖2 車體的組成
為了讓車體工作時具有較高靈活性,上下兩部分機體采用了轉盤連接,如圖3所示。轉盤鏈接機構由一個大直徑定齒輪與一個小直徑動齒輪組成。定齒輪保持不動,通過動齒輪轉動形成一個穩定圓周運動。為避免轉盤工作時受驅動電機導線影響,在轉盤連接處采用導電滑環設計,滑環上下部分分別位于小車上下連接部分。

圖3 上下部分裝盤連接
在設計小車底盤時,有普通汽車底盤和履帶底盤兩種方案,對比兩種系統方案,本設計采用了比較折中方式,即左右并列兩個驅動輪作為動力,前后加上兩個萬向輪作為平衡結構,既保證了車體平衡,也保證了車體具有較高靈活性。同時,采用雙電機作為驅動動力,有效降低了電池電量消耗,讓小車完成更多的運輸工作。
3 系統控制設計
系統控制以ESP8266WIFI串口模塊為控制核心,采用傳感器進行位置檢測,使搬運車能夠做出各種組合運動,具體控制流程如圖4所示。利用ESP8266WIFI串口模塊WIFI功能與小車進行遠程通信,根據貨物重量與大小,發出不同組合信號,控制小車進行運輸;利用激光發射器和接收器進行定位,不斷發射與接收信號,控制器判斷小車是否以及到達對接位置,若未到達,則系統控制小車進行移動與轉向,調整小車姿態,保證小車準確對接,如此循環直到小車到達預定對接位置;當小車到達預定對接位置時,系統控制小車進行對接,對接完成后控制電磁鐵使兩車連接。

圖4 小車控制流程圖
4 運行情況介紹
根據三維設計效果完成了四輛小車制作,四輛小車可以根據不同貨物重量和大小進行靈活組合,滿足各種需求,實現多工作狀態模式。
(1)物件較小,單個車里能夠裝載的情況。各小車單獨運行,互不干涉,三維效果及實物運行如圖5所示。
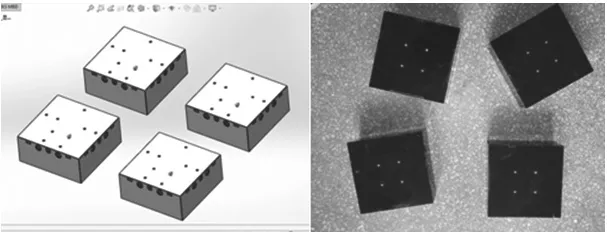
圖5 各小車單獨工作狀態
(2)物件稍大的情況。兩輛小車自動組合,實現搬運,三維效果及實物運行如圖6所示。
(3)物件占地面積較大的情況。四輛小車組合成“大田字”形狀,聯合運送貨物,三維效果及實物運行如圖7所示。
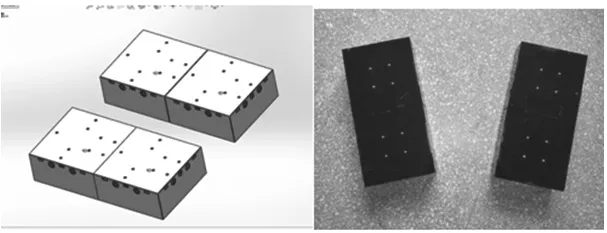
圖6 兩兩組合工作狀態

圖7 四輛車“大田字”組合工作狀態
(4)物件長度較長的情況。四輛小車組合成“長一字”形狀,聯合運送貨物,三維效果及實物運行如圖8所示。

圖8 四輛車“長一字”組合工作狀態
5 結語
組合式智能搬運車優點在于能夠針對不同體積貨物組合出不同形狀,以單一機器來實現倉庫貨物運輸,避免出現大機器搬運小物件、小機器運不了大物件等問題,有效降低了運輸成本、工人工作強度以及運輸時間,提高了工作效率、載運速度以及貨物流通量。
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中華詩詞(2018年11期)2018-03-26 06:41:34
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年8期)2016-10-09 02:11:50
中國醫藥科學(2015年19期)2015-02-27 12:33:11
