基于航空反潛戰(zhàn)術(shù)搜索確定區(qū)域的優(yōu)化方法
2018-02-07 05:45:11鄭潤(rùn)高張成棟
艦船電子工程 2018年1期
鄭潤(rùn)高 張成棟
(海軍蚌埠士官學(xué)校 蚌埠 233012)
1 引言
由于現(xiàn)代潛艇的威脅正在不斷增長(zhǎng),反潛戰(zhàn)作為潛艇戰(zhàn)的反制措施,正在受到各海軍國(guó)家的普遍重視。目前,世界各國(guó)海軍的大、中型反潛水面艦艇普遍裝備有反潛直升機(jī)。艦載直升機(jī)反潛已成為現(xiàn)代水面艦艇反潛的重要手段。航空反潛以其快速反應(yīng)能力強(qiáng)、搜潛效率高、隱蔽安全、攻潛效果好等優(yōu)勢(shì)而成為反潛的主力軍。航空反潛主要由搜索和攻擊兩部分行動(dòng)組成,而對(duì)潛艇的搜索是關(guān)系到反潛作戰(zhàn)成敗的首要環(huán)節(jié)[1]。因此,科學(xué)組織搜索行動(dòng)、提高搜索效率的重要性不言而喻。為研究方便,本文假定反潛活動(dòng)方式為應(yīng)召反潛。
2 一般的航空反潛搜索區(qū)域確定模型[1]及其不足
2.1 一般的航空反潛搜索區(qū)域確定模型
應(yīng)召反潛搜索區(qū)[2]通常根據(jù)發(fā)現(xiàn)目標(biāo)的初始位置、判斷敵潛艇可能使用的航速(v潛)、從發(fā)現(xiàn)潛艇到飛機(jī)到達(dá)發(fā)現(xiàn)目標(biāo)的初始位置所用的總時(shí)間(t總)、反潛飛機(jī)搜索所用時(shí)間(t搜)等因素來確定。
其中,t總=t報(bào)+t決+t傳+t準(zhǔn)+t航。 t報(bào)為最初發(fā)現(xiàn)潛艇并報(bào)告指揮所經(jīng)過的時(shí)間;t決為指揮員定下決心所用時(shí)間;t傳為傳達(dá)命令所用時(shí)間;t準(zhǔn)為反潛飛機(jī)出動(dòng)準(zhǔn)備所用時(shí)間;t航為反潛飛機(jī)飛抵目標(biāo)初始發(fā)現(xiàn)點(diǎn)所用時(shí)間。反潛飛機(jī)搜索范圍的大小為

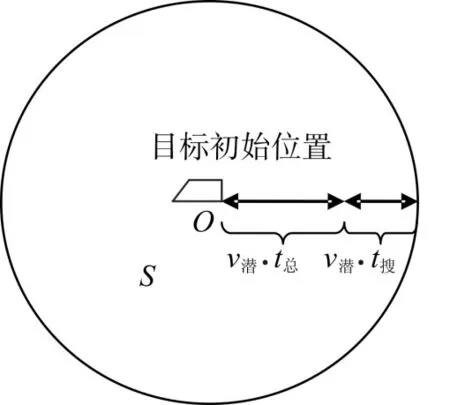
圖1 確定應(yīng)召反潛搜索區(qū)示意圖
2.2 模型存在的不足
現(xiàn)代信息化戰(zhàn)爭(zhēng)中戰(zhàn)場(chǎng)環(huán)境瞬息萬變,戰(zhàn)斗行動(dòng)效率將直接影響戰(zhàn)斗結(jié)果。在反潛搜索行動(dòng)中,搜索區(qū)域的確定是搜索行動(dòng)的第一步,對(duì)于搜索結(jié)果有著重要影響。上述搜索區(qū)域確定模型雖然在理論上講完全符合作戰(zhàn)要求,但是從實(shí)戰(zhàn)角度來說還存在著以下兩個(gè)方面的不足:
一是搜索區(qū)域沒有輕重主次之分。我們知道在一定條件下的一定時(shí)間內(nèi)潛艇活動(dòng)具有一定的連續(xù)性,比如在目標(biāo)潛艇尚未發(fā)覺我方發(fā)現(xiàn)其行蹤時(shí),它的行動(dòng)軌跡、速度、狀態(tài)、航向等均不會(huì)發(fā)生急劇變化。因此,在一定時(shí)間內(nèi),確定反潛飛機(jī)搜索范圍應(yīng)當(dāng)充分考慮這些因素。上述模型從理論上雖然完全覆蓋了目標(biāo)潛艇存在的范圍,但忽略了潛艇存在區(qū)域的差別性和規(guī)律性。對(duì)某些區(qū)域來說,目標(biāo)潛艇存在的可能性很小或者根本就不可能存在。這種“顧全”的搜索思路可能會(huì)影響整個(gè)反潛行動(dòng)的效率,延長(zhǎng)反潛搜索時(shí)間,延誤最佳搜索時(shí)機(jī)。
二是搜索區(qū)域的確定缺乏動(dòng)態(tài)性。在反潛搜索行動(dòng)中敵我雙方均在動(dòng)態(tài)變化,所以搜索區(qū)域的確定在充分考慮輕重主次的基礎(chǔ)上還應(yīng)該考慮彼此動(dòng)態(tài)變化這一重要特點(diǎn)。依上述模型,以磁力探測(cè)儀搜索中的圓形搜索方法為例[1],反潛飛機(jī)搜索路徑為圓形,其半徑主要取決于敵潛艇可能使用的速度(v潛)和發(fā)現(xiàn)到開始搜索的時(shí)間間隔(t),計(jì)算公式為:R=v潛?t,得到的搜索區(qū)域是一個(gè)固定的圓形區(qū)域。而在實(shí)戰(zhàn)中,按照半徑R(t)=v潛?f(t)計(jì)算公式所進(jìn)行的搜索效率比較理想。
3 航空反潛搜索區(qū)域分析與優(yōu)化
3.1 搜索區(qū)域確定方法的優(yōu)化
為研究方便,我們給出了如下一些變量及其意義說明:vmax為目標(biāo)潛艇最大可能航速,判斷依據(jù)來源于戰(zhàn)前對(duì)目標(biāo)潛艇情報(bào)的搜集;vmin為目標(biāo)潛艇最小可能航速,判斷依據(jù)為目標(biāo)潛艇為達(dá)到一定戰(zhàn)術(shù)目的所做的戰(zhàn)術(shù)調(diào)整(如低速航行降噪),0≤vmin≤v潛;v潛為初始位置時(shí)刻目標(biāo)潛艇航速,若搜索行動(dòng)開始前仍無法確定目標(biāo)潛艇航速,則令v潛=vmax;φ為初始位置時(shí)刻判斷的目標(biāo)潛艇航向,搜索行動(dòng)開始前仍無法確定時(shí)以發(fā)現(xiàn)點(diǎn)至我方連線角度進(jìn)行賦值替代。在搜索行動(dòng)中,可依據(jù)獲取的實(shí)際信息重新進(jìn)行賦值;t總為同上,即t總=t報(bào)+t決+t傳+t準(zhǔn)+t航;t搜為同上,即搜索行動(dòng)所需時(shí)間;S1為從發(fā)現(xiàn)目標(biāo)潛艇至反潛機(jī)到達(dá)潛艇初始位置時(shí)間內(nèi)目標(biāo)潛艇最小擴(kuò)散面積,S1=π(vmin?t總)2;S2為從發(fā)現(xiàn)目標(biāo)潛艇至反潛機(jī)到達(dá)潛艇初始位置期間目標(biāo)潛艇以v潛航行的擴(kuò)散面積,S2=π(v潛?t總)2;S3為從發(fā)現(xiàn)目標(biāo)潛艇至反潛機(jī)到達(dá)潛艇初始位置時(shí)間內(nèi)目標(biāo)潛艇最大擴(kuò)散面積,S3=π(vmax?t總)2;S4為從發(fā)現(xiàn)目標(biāo)潛艇至反潛機(jī)完成搜索任務(wù)時(shí)間內(nèi)目標(biāo)潛艇最大擴(kuò)散面積,S4= π(v潛(t總+t搜)]2。
實(shí)際需要搜索的面積:
S實(shí)=S4-S1= π[v潛(t總+t搜)]2- π(vmin?t總)2
上述面積公式意義:無論潛艇航向如何,在反潛飛機(jī)到達(dá)初始位置時(shí)刻,目標(biāo)潛艇出現(xiàn)在S1區(qū)域的概率為0。這里vmin的估計(jì)可借助風(fēng)險(xiǎn)偏好理論相關(guān)內(nèi)容,在此不作論述。示意圖如圖2所示。
3.2 搜索區(qū)域潛艇位置的概率密度特征
搜索區(qū)域的確定只是從理論上圈定了目標(biāo)潛艇可能存在的最大范圍。要實(shí)施搜潛行動(dòng),提高搜潛效率,必須研究搜潛規(guī)律,增強(qiáng)搜潛針對(duì)性,為科學(xué)決策搜潛方案提供依據(jù)。如圖2所示,潛艇位置用極坐標(biāo)(r,θ)表示。

圖2 優(yōu)化的確定應(yīng)召反潛搜索區(qū)示意圖
3.2.1 極半徑r和極角θ上潛艇的概率密度特征
以初始位置時(shí)刻對(duì)目標(biāo)潛艇的判斷航向(φ)為參考角度0,以逆時(shí)針轉(zhuǎn)向?yàn)檎担槙r(shí)針轉(zhuǎn)向?yàn)樨?fù)值。則在t總+?t時(shí)刻,目標(biāo)潛艇偏離的相對(duì)角度θ服從正態(tài)分布,并且其概率密度函數(shù)f(θ)的圖形關(guān)于直線 θ=0對(duì)稱,如式(2):

3.2.2 搜索區(qū)域內(nèi)潛艇的概率密度特征
應(yīng)該明確的是,目標(biāo)潛艇在搜索區(qū)域內(nèi)的存在位置由r和θ共同決定。上面已經(jīng)對(duì)潛艇所在半徑位置和偏離預(yù)測(cè)航向的正態(tài)分布特性進(jìn)行了討論,可以推知反潛飛機(jī)到達(dá)初始位置時(shí)刻目標(biāo)潛艇在搜索區(qū)域內(nèi)的存在狀況服從以r和θ為變量的聯(lián)合正態(tài)分布,潛艇在搜索區(qū)域內(nèi)的聯(lián)合概率密度函數(shù)如式(3):
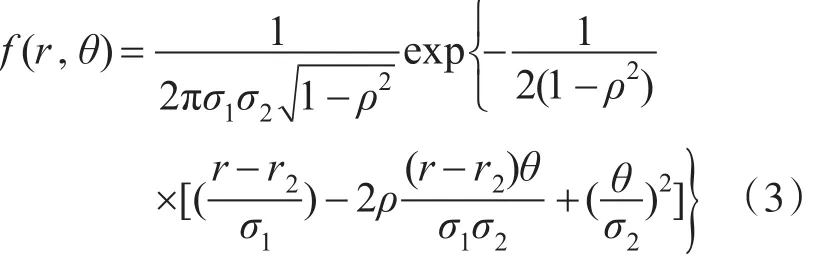
其中,r1≤r≤r3,-π≤θ≤+π。
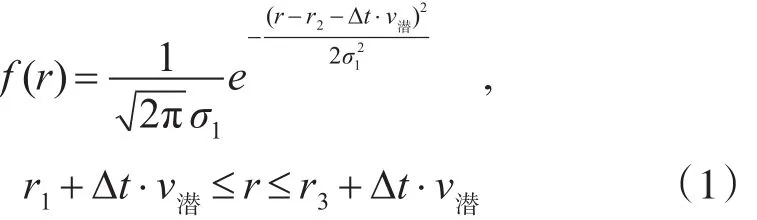
一般在反潛機(jī)達(dá)到初始位置后,目標(biāo)潛艇一直在沿著半徑方向運(yùn)動(dòng),隨著時(shí)間的推移這種位置的變化必然會(huì)帶來潛艇在搜索區(qū)域內(nèi)的聯(lián)合概率密度發(fā)生改變,這種變化我們應(yīng)當(dāng)加以考慮和計(jì)算。在t總+?t時(shí)刻,潛艇在搜索區(qū)域內(nèi)的聯(lián)合概率密度函數(shù)見式(4):
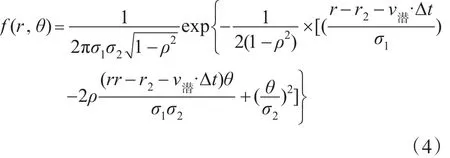
其中 r1+v潛??t≤r≤r3+v潛??t,-π≤θ≤+π ,v潛??t表示在?t時(shí)間內(nèi)潛艇在半徑方向發(fā)生的位移。
參數(shù)σ1、σ2、ρ的確定有兩種方法:一種方法是依據(jù)試驗(yàn)或?qū)崙?zhàn)積累的大量數(shù)據(jù),借助數(shù)理統(tǒng)計(jì)理論分析得出,這個(gè)問題的求證超出筆者能力范圍,在此不再討論;在沒有試驗(yàn)數(shù)據(jù)的情況下,另一種方法是進(jìn)行風(fēng)險(xiǎn)決策[3],主要的決策準(zhǔn)則有樂觀準(zhǔn)則、悲觀準(zhǔn)則、折衷準(zhǔn)則、遺憾準(zhǔn)則和等可能性準(zhǔn)則。圖3為 ρ=0.1、μ1=0、μ2=0、σ1=2、σ2=3的二維正態(tài)分布圖及其概率密度等值線圖。
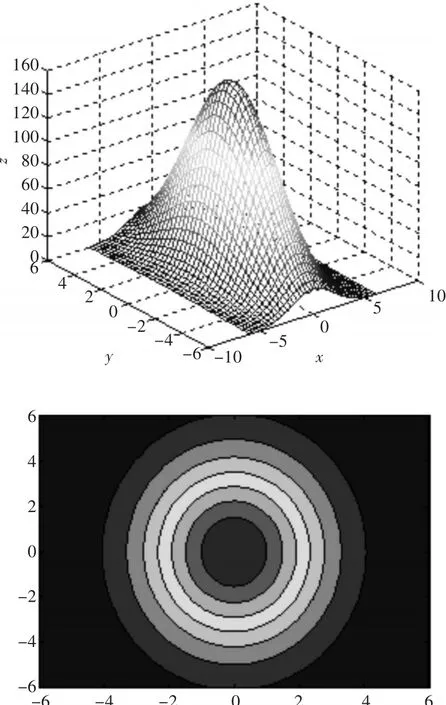
圖3 二維正態(tài)分布概率密度圖及其等值線圖
3.2.3 搜索區(qū)域的進(jìn)一步優(yōu)化
由概率分布密度函數(shù)公式及仿真圖形可知,在搜索區(qū)域內(nèi)存在一個(gè)如圖4所示粗線表示的橢圓區(qū),橢圓中心點(diǎn)極坐標(biāo)為 (r中,0),r中=v潛?(t總+?t),短軸與-→----OB共線。該橢圓區(qū)是t總+?t時(shí)刻目標(biāo)潛艇存在的最大可能區(qū)域,潛艇出現(xiàn)在該區(qū)域某點(diǎn)(r,θ)的概率密度值與|r-r中|和 ||θ 均成反比關(guān)系。因此,該橢圓區(qū)是反潛飛機(jī)重點(diǎn)搜索區(qū)域,搜索時(shí)應(yīng)按照潛艇出現(xiàn)在該區(qū)的概率密度大小合理設(shè)置搜索密度和探測(cè)設(shè)備投放密度。
4 搜索區(qū)域的優(yōu)化對(duì)搜索行動(dòng)的影響
4.1 搜索行動(dòng)起始坐標(biāo)的選擇
搜索起始坐標(biāo)的選擇對(duì)于搜潛效率的提高起著至關(guān)重要的作用。要科學(xué)決策搜索起始坐標(biāo),必須從兩個(gè)方面進(jìn)行考慮:一是目標(biāo)潛艇所在位置的半徑;二是目標(biāo)潛艇所在位置的相對(duì)角度。這兩個(gè)方面的因素相互關(guān)聯(lián),共同決定著搜潛起始坐標(biāo)[4~5]。

圖4 反潛搜索中重點(diǎn)搜索區(qū)示意圖
由圖3中的聯(lián)合正態(tài)分布概率密度等值線可知,最佳起始搜索位置應(yīng)該選擇在點(diǎn)(r,θ)=(r2,0)的鄰域內(nèi)。
4.2 搜索路徑的擬合模型[6]
設(shè)反潛機(jī)搜索潛艇起點(diǎn)為O′,基于對(duì)目標(biāo)潛艇存在的聯(lián)合概率分布密度和潛艇向外擴(kuò)散的考慮,搜索路徑應(yīng)該是一條自O(shè)′出發(fā)不斷向外擴(kuò)展的橢圓螺線,該螺線隨著|r-r中|和角度 ||θ的增大步長(zhǎng)逐漸增大。

圖5 搜索路徑仿真圖
該約束條件意味著潛艇在飛機(jī)飛行一圈所需時(shí)間內(nèi)移動(dòng)的距離應(yīng)當(dāng)小于或等于飛機(jī)在半徑方向上移動(dòng)的距離,一旦該條件不滿足應(yīng)該及時(shí)修正路徑參數(shù),從而保證搜索的可靠性。由此可知,在搜索過程中,飛機(jī)最佳搜索速度是當(dāng)上式取等號(hào)時(shí)的飛行速度。
5 結(jié)語
優(yōu)化潛艇搜索區(qū)域后,建立搜索路徑的擬合模型,我們可以通過將典型戰(zhàn)術(shù)技術(shù)參數(shù)帶入公式,進(jìn)行定量分析,以期對(duì)戰(zhàn)術(shù)動(dòng)作提供一定的指導(dǎo)。在航空反潛搜索行動(dòng)中,對(duì)搜索區(qū)域的優(yōu)化是提高搜潛效率的重要途徑,很多具體細(xì)節(jié)還可以進(jìn)一步從理論上優(yōu)化,在試驗(yàn)中論證,希望本文的工作能起一個(gè)拋磚引玉的作用。
[1]孫明太.航空反潛概論[M].北京:國(guó)防工業(yè)出版社,1998:344-345.
[2]譚樂祖等.最小二乘法在直升機(jī)扇形應(yīng)召搜潛陣中的應(yīng)用[J].艦船電子工程,2016,36(1):20-22.
[3]彭勇行.管理決策分析[M].北京:科學(xué)出版社,2000.
[4]李長(zhǎng)明.艦載直升機(jī)反潛搜索最佳方案優(yōu)選模型及應(yīng)用[J].火力與指揮控制,2005,30(8):68-71.
[5]戰(zhàn)凱.對(duì)策論在航空反潛搜索效能評(píng)估中的應(yīng)用研究[J].系統(tǒng)仿真學(xué)報(bào),2006,18(8):2086-2088.
[6]譚樂祖,張?jiān)姷?直升機(jī)單機(jī)等距螺旋應(yīng)召搜潛效能模型與仿真.火力與指揮控制,2016,41(8):102-104.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
小學(xué)生導(dǎo)刊(低年級(jí))(2016年8期)2016-09-24 22:09:04
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
