偏置比例導(dǎo)引末制導(dǎo)控制
2018-01-29 09:28:32金玉華楊曉鋒
中國(guó)慣性技術(shù)學(xué)報(bào) 2017年6期
關(guān)鍵詞:發(fā)動(dòng)機(jī)
高 靜,金玉華,楊曉鋒
(1. 中國(guó)航天科工二院,北京 100854;2. 中國(guó)航天科工二院二部,北京 100854)
隨著現(xiàn)代科技的發(fā)展,近旁飛躍觀(guān)察目標(biāo)已成為重要的作戰(zhàn)方式之一。對(duì)于合作目標(biāo)來(lái)說(shuō),可以近距離觀(guān)測(cè)其飛行狀態(tài),提供其運(yùn)行狀況、故障類(lèi)別等信息[1]。
為了實(shí)現(xiàn)對(duì)空間目標(biāo)的清晰觀(guān)測(cè),要求飛行器從目標(biāo)附近掠過(guò),因而提出了偏置制導(dǎo)控制技術(shù),根據(jù)觀(guān)測(cè)的需要控制飛行器與目標(biāo)之間的最短距離,來(lái)觀(guān)測(cè)目標(biāo)外部結(jié)構(gòu)及故障情況,以滿(mǎn)足日益發(fā)展的科研需求。
偏置比例導(dǎo)引(Biased Proportional Navigation,BPN)是比例導(dǎo)引的一種改進(jìn)形式,它是在比例導(dǎo)引的基礎(chǔ)上添加一個(gè)偏置項(xiàng)來(lái)滿(mǎn)足不同的約束條件。目前大部分的偏置比例導(dǎo)引律設(shè)計(jì)都是針對(duì)直接命中目標(biāo),且在導(dǎo)引過(guò)程中提出不同約束條件如控制終端角度[3]、終端時(shí)間[9]、視場(chǎng)角[10]等,只有很少的偏置導(dǎo)引律應(yīng)用于將飛行器導(dǎo)引到目標(biāo)附近特定的近旁飛躍點(diǎn)。陸毓峰[11]等針對(duì)紅外導(dǎo)引頭只能跟蹤目標(biāo)尾焰中心從而造成未命中目標(biāo)的問(wèn)題提出了一種能實(shí)現(xiàn)超前偏置的比例導(dǎo)引律,該導(dǎo)引律可以使命中點(diǎn)前移一段距離,增大毀傷效率。王珂[12]在考慮彈目相對(duì)距離的估計(jì)誤差和視線(xiàn)轉(zhuǎn)率測(cè)量噪聲的條件下在二維平面內(nèi)設(shè)計(jì)了一種偏置導(dǎo)引律,實(shí)現(xiàn)了不干擾目標(biāo)在交會(huì)末端對(duì)目標(biāo)的觀(guān)測(cè),但在滿(mǎn)足視線(xiàn)轉(zhuǎn)率的要求值附近時(shí),軌控發(fā)動(dòng)機(jī)會(huì)發(fā)生頻繁對(duì)開(kāi)的情況,導(dǎo)致燃料浪費(fèi),因此其觀(guān)測(cè)目標(biāo)的數(shù)量受限。
本文對(duì)偏置比例末制導(dǎo)控制進(jìn)行優(yōu)化,首先研究了軌道和姿態(tài)控制發(fā)動(dòng)機(jī)的推力特性及姿軌控發(fā)動(dòng)機(jī)的相互影響,進(jìn)而在視線(xiàn)坐標(biāo)系的兩平面內(nèi)分別應(yīng)用偏置比例導(dǎo)引進(jìn)行偏置控制,提出一種能夠?qū)崿F(xiàn)垂直于視線(xiàn)的平面內(nèi)任意方向偏置的改進(jìn)偏置比例導(dǎo)引律,并給出了一種姿態(tài)控制律,最后在三維空間內(nèi)分析了飛行器的偏置比例導(dǎo)引末制導(dǎo)過(guò)程。
1 發(fā)動(dòng)機(jī)模型
軌控發(fā)動(dòng)機(jī)布局如圖1所示,4臺(tái)軌控發(fā)動(dòng)機(jī)沿周向均勻分布,其中1、3用來(lái)調(diào)整飛行器彈體系Y1軸方向上的運(yùn)動(dòng),2、4用來(lái)調(diào)整飛行器彈體系 Z1軸方向上的運(yùn)動(dòng)。
軌控發(fā)動(dòng)機(jī)產(chǎn)生的力和力矩在彈體坐標(biāo)系中分量形式為
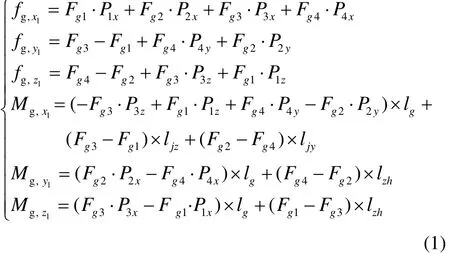
其中:lg為軌控發(fā)動(dòng)機(jī)推力作用點(diǎn)到軸向的距離(力臂);ljz、ljy分別為沿彈體執(zhí)行系Z1和Y1方向的徑向質(zhì)心漂移;lzh為軸向質(zhì)心漂移;P1x、P2x、P3x、P4x、P2y、P4y、P1z、P3z均為推力偏心。
姿控發(fā)動(dòng)機(jī)布局如圖2所示,姿控發(fā)動(dòng)機(jī)的輸入信號(hào)為六個(gè)開(kāi)關(guān)指令,輸出為彈體坐標(biāo)系中的三個(gè)方向的控制力矩和力。
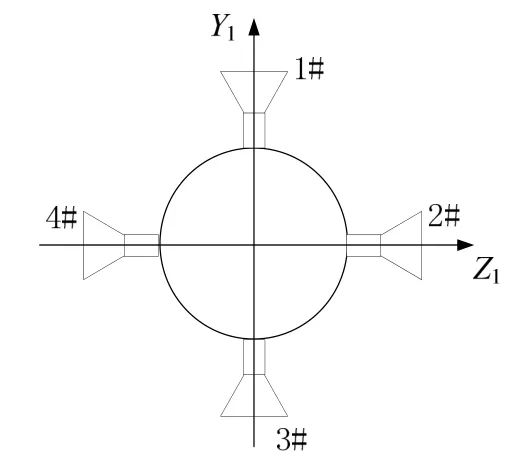
圖1 軌控布局(從尾部看)Fig.1 Divert thruster layout(viewed from tail)
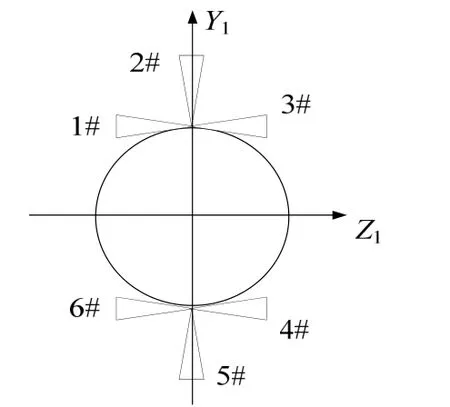
圖2 姿控布局(從尾部看)Fig.2 Attitude-control layout (viewed from tail)
由圖2可得:
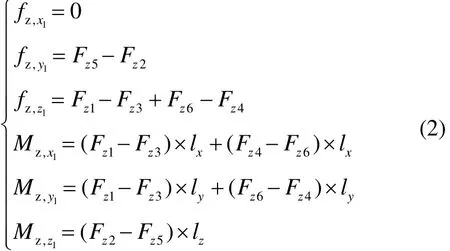
其中:lx、ly、lz分別是姿控力在彈體系 X1、Y1、Z1軸上的力臂。
由以上分析可知,在設(shè)計(jì)姿態(tài)控制律時(shí)要考慮到軌控發(fā)動(dòng)機(jī)產(chǎn)生的干擾力矩,同時(shí)在設(shè)計(jì)制導(dǎo)律時(shí)也要考慮到姿控發(fā)動(dòng)機(jī)產(chǎn)生的干擾力。
軌控發(fā)動(dòng)機(jī)推力上升和下降過(guò)程如圖3所示,則軌控發(fā)動(dòng)機(jī)的推力由推力曲線(xiàn)可得式(3):
圖3 軌控發(fā)動(dòng)機(jī)推力曲線(xiàn)圖Fig.3 Thrust curve of divert thruster
式中:發(fā)動(dòng)機(jī)穩(wěn)態(tài)推力為Fgmax;td是延時(shí)時(shí)間;tr是上升時(shí)間;tf是下降時(shí)間。
姿控發(fā)動(dòng)機(jī)推力工作曲線(xiàn)同軌控發(fā)動(dòng)機(jī),見(jiàn)圖 3。
本文為提高軌控發(fā)動(dòng)機(jī)燃料消耗效率,在考慮到當(dāng)前軌控發(fā)動(dòng)機(jī)的上個(gè)周期開(kāi)關(guān)指令和上兩個(gè)周期的開(kāi)關(guān)指令狀態(tài)基礎(chǔ)上,通過(guò)動(dòng)態(tài)調(diào)節(jié)3個(gè)發(fā)動(dòng)機(jī)閾值確定當(dāng)前發(fā)動(dòng)機(jī)的開(kāi)關(guān)狀態(tài)。
2 偏置比例導(dǎo)引末制導(dǎo)律
2.1 三維偏置比例導(dǎo)引律設(shè)計(jì)
已知零控脫靶量h可以近似表示為

式中:r˙為接近速度;tgo為剩余時(shí)間;ω為視線(xiàn)轉(zhuǎn)率。
近旁飛越的需求是希望有固定的脫靶量D,若要最終實(shí)現(xiàn)飛行器以h=D從目標(biāo)近旁飛過(guò),則根據(jù)式(4)應(yīng)有:

將r = -r˙tgo代入式(5)可得:

所以二維偏置制導(dǎo)律的形式為

其中:N為比例導(dǎo)引系數(shù)。
然而,以式(6)為偏置量,當(dāng)r逐漸降低時(shí),biasω會(huì)逐漸增大,當(dāng)r小于某一值時(shí),biasω會(huì)劇烈增加,而導(dǎo)致指令加速度也劇烈增大。因而,在某一固定距離rend前,應(yīng)停止對(duì)視線(xiàn)轉(zhuǎn)率的制導(dǎo)控制。
以上的分析均在二維平面內(nèi),而真實(shí)的觀(guān)測(cè)過(guò)程發(fā)生在三維空間內(nèi),對(duì)目標(biāo)的近旁飛躍過(guò)程也應(yīng)置于三維空間中分析。
飛行器和目標(biāo)的相對(duì)運(yùn)動(dòng)方程通常建立在視線(xiàn)坐標(biāo)系內(nèi),即
傳統(tǒng)的三維偏置比例導(dǎo)引律應(yīng)該在兩個(gè)相互垂直的平面內(nèi)分別設(shè)計(jì),實(shí)際上,通常在一個(gè)平面內(nèi)使用普通的比例導(dǎo)引律,而在想要偏置的平面內(nèi)使用偏置比例導(dǎo)引。如圖4所示,在無(wú)偏置情況下飛行器在o點(diǎn),目標(biāo)在T點(diǎn),本文根據(jù)三維相對(duì)運(yùn)動(dòng)方程可以在視線(xiàn)坐標(biāo)系的兩平面內(nèi)分別應(yīng)用偏置比例導(dǎo)引進(jìn)行偏置控制,如此可實(shí)現(xiàn)在垂直于視線(xiàn)的平面內(nèi)任意方向的偏置,使飛行器偏置到o′點(diǎn),即
圖4 兩通道BPN的控制效果示意圖Fig.4 Control effect of two-channel BPN
其中:
vy和 vz分別是飛行器和目標(biāo)的相對(duì)速度在視線(xiàn)坐標(biāo)系Ylos軸和Zlos軸方向的分量;hy和hz分別是飛行器相對(duì)目標(biāo)在視線(xiàn)坐標(biāo)系Ylos軸和Zlos軸方向的期望偏置距離。
對(duì)于非機(jī)動(dòng)目標(biāo),比例導(dǎo)引律的目的是使ω趨于0,因而相應(yīng)地,三維偏置比例導(dǎo)引律可以使yω、zω分別趨于Biasyω和Biaszω,即

因此,當(dāng)hy> 0,hz< 0時(shí),yω、zω分別趨向于一個(gè)大于0的小量,即最后視線(xiàn)傾角和視線(xiàn)偏角均向正向發(fā)散。同理,當(dāng)hy< 0,hz> 0時(shí),最后視線(xiàn)傾角和視線(xiàn)偏角均向負(fù)向發(fā)散。
2.2 姿態(tài)控制律
本文采用變結(jié)構(gòu)控制器完成俯仰、偏航和滾轉(zhuǎn)三通道的控制。
令姿態(tài)控制指令有:

其中:qε是視線(xiàn)傾角;qβ是視線(xiàn)偏角。
由于姿控發(fā)動(dòng)機(jī)推力的非線(xiàn)性,不可能完全跟蹤控制指令,只能將二者之差限制在一定的范圍。以俯仰通道為例,由式(3)可知,俯仰通道的姿態(tài)由2號(hào)、5號(hào)姿控發(fā)動(dòng)機(jī)控制,定義俯仰控制器的開(kāi)關(guān)函數(shù):

其中: ez=?-?c;e˙z= ?-?˙c; cz是大于零的常數(shù)。
當(dāng) sz≥δz時(shí),姿控發(fā)動(dòng)機(jī)2開(kāi),5關(guān);
當(dāng)sz<δz時(shí),姿控發(fā)動(dòng)機(jī)2、5都關(guān);
當(dāng) sz≤ - δz時(shí),姿控發(fā)動(dòng)機(jī)2關(guān),5開(kāi)。
同理,可以設(shè)計(jì)偏航和滾裝通道的姿態(tài)控制律,姿控發(fā)動(dòng)機(jī)分配邏輯如表1和表2所示。
表1 滾轉(zhuǎn)和偏航控制發(fā)動(dòng)機(jī)分配邏輯(點(diǎn)火發(fā)動(dòng)機(jī)號(hào))Tab.1 Allocation logic of roll and yaw control engines(number of ignition engine)
表2 俯仰控制發(fā)動(dòng)機(jī)分配邏輯Tab.2 Allocation logic of pitch control engine
3 偏置末制導(dǎo)控制系統(tǒng)原理
當(dāng)飛行器的觀(guān)測(cè)設(shè)備成功探測(cè)到目標(biāo)后,調(diào)整姿態(tài)使觀(guān)測(cè)設(shè)備能夠在穩(wěn)定地跟蹤到目標(biāo)并輸出視線(xiàn)角時(shí),進(jìn)行偏置末制導(dǎo)控制,控制飛行器的彈道不斷與目標(biāo)接近并且使飛行器的姿態(tài)一直穩(wěn)定地跟蹤目標(biāo)。為了防止偏置末制導(dǎo)后期視線(xiàn)轉(zhuǎn)率發(fā)散很快,設(shè)置剩余飛行距離,在到達(dá)剩余飛行距離后發(fā)動(dòng)機(jī)關(guān)機(jī),飛行器在無(wú)控情況下依靠慣性飛行,飛行器與目標(biāo)不斷接近,直到二者的最小距離達(dá)到需求。
實(shí)現(xiàn)飛行器偏置末制導(dǎo)控制主要由觀(guān)測(cè)設(shè)備、慣性測(cè)量裝置、彈載計(jì)算機(jī)、姿控發(fā)動(dòng)機(jī)及軌控發(fā)動(dòng)機(jī)組成[3,13-14],如圖5所示。軌控發(fā)動(dòng)機(jī)安裝在過(guò)質(zhì)心的橫截面上,控制飛行器的質(zhì)心運(yùn)動(dòng);姿控發(fā)動(dòng)機(jī)安裝在后端,控制飛行器的姿態(tài)。
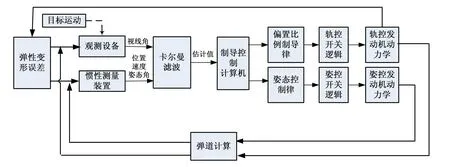
圖5 偏置末制導(dǎo)控制系統(tǒng)框圖Fig.5 Biased terminal guidance control system
當(dāng)前控制周期內(nèi),觀(guān)測(cè)設(shè)備探測(cè)跟蹤目標(biāo)并輸出視線(xiàn)角,慣性測(cè)量裝置計(jì)算飛行器當(dāng)前姿態(tài)角以及位置和速度,彈載計(jì)算機(jī)接收這些信息后按照設(shè)定好的制導(dǎo)和控制規(guī)律控制軌控發(fā)動(dòng)機(jī)和姿控發(fā)動(dòng)機(jī)工作。由姿、軌控發(fā)動(dòng)機(jī)提供的推力大小對(duì)飛行器和目標(biāo)的三維運(yùn)動(dòng)方程進(jìn)行解算,得出二者新的位置、速度和姿態(tài)信息,再通過(guò)觀(guān)測(cè)設(shè)備和慣性測(cè)量裝置輸出下一個(gè)控制周期的測(cè)量信息。整個(gè)偏置末制導(dǎo)系統(tǒng)構(gòu)成一個(gè)閉環(huán)的回路,通過(guò)消除視線(xiàn)轉(zhuǎn)律改變飛行器的速度方向,確保飛行器以相對(duì)穩(wěn)定的姿態(tài)向目標(biāo)方向接近。
4 仿真驗(yàn)證
為了驗(yàn)證本文提出的偏置導(dǎo)引方法的有效性,設(shè)置兩組不同的交會(huì)方式,仿真初始參數(shù)如表3所示。設(shè)兩組仿真期望偏置距離均為hy=20 m,hz=20 m,得到的最后兩組仿真的脫靶量誤差如表4所示。
由圖6~7可以看出,在末制導(dǎo)后期瞬時(shí)零控脫靶量繞期望偏置距離上下振蕩幾次后都收斂到期望的偏置距離,兩種交會(huì)情況均成功實(shí)現(xiàn)對(duì)飛行器偏置距離的約束,脫靶量誤差都小于0.5 m。
圖8~9結(jié)果表明,整個(gè)偏置末制導(dǎo)過(guò)程中飛行器的俯仰角和偏航角一直穩(wěn)定在初始視線(xiàn)傾角和視線(xiàn)偏角附近,滾轉(zhuǎn)角穩(wěn)定在零附近。
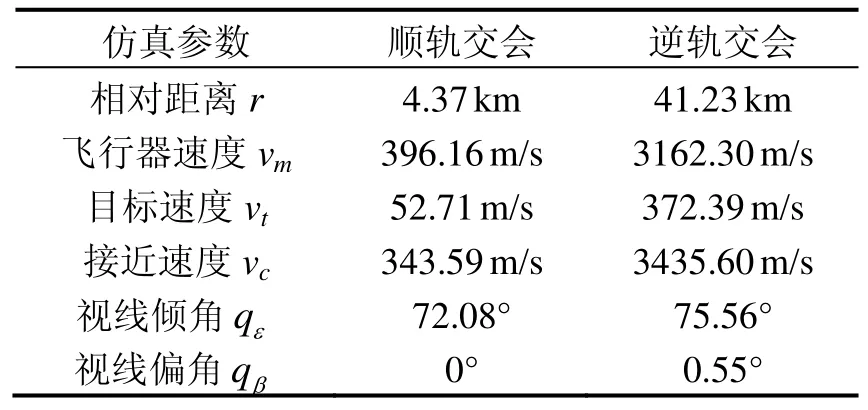
表3 仿真中初始參數(shù)Tab.3 Initial parameters in simulation
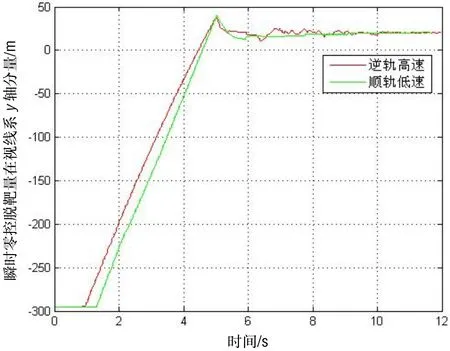
圖6 瞬時(shí)零控脫靶量在視線(xiàn)系y軸分量變化曲線(xiàn)Fig.6 Variation curve of y component of instant ZEM in LOS system
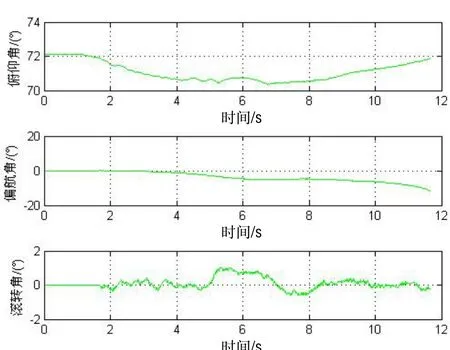
圖8 順軌交會(huì)姿態(tài)角變化曲線(xiàn)Fig.8 Variation curve of attitude angle of along-rail intersection
5 結(jié) 論
具有終端偏置距離約束的三維導(dǎo)引律設(shè)計(jì)目前還未見(jiàn)與本文方法類(lèi)似的文章,本文針對(duì)非機(jī)動(dòng)目標(biāo)分析了偏置比例導(dǎo)引末制導(dǎo)系統(tǒng),重點(diǎn)研究了偏置制導(dǎo)律及姿態(tài)控制律,成功實(shí)現(xiàn)在目標(biāo)旁的偏置并且在偏置過(guò)程中成功控制了飛行器的姿態(tài),驗(yàn)證了偏置制導(dǎo)控制是可行的,為對(duì)目標(biāo)近距離觀(guān)測(cè)提供了一種新的方法。
(
):
[1] 李廣華. 近旁飛躍航天器末制導(dǎo)方法研究[D]. 長(zhǎng)沙:國(guó)防科學(xué)技術(shù)大學(xué)研究生院, 2011.Li G H. Study on terminal guidance of flyby spacecraft[D]. Changsha: Graduate School of National University of Defense Technology, 2011.
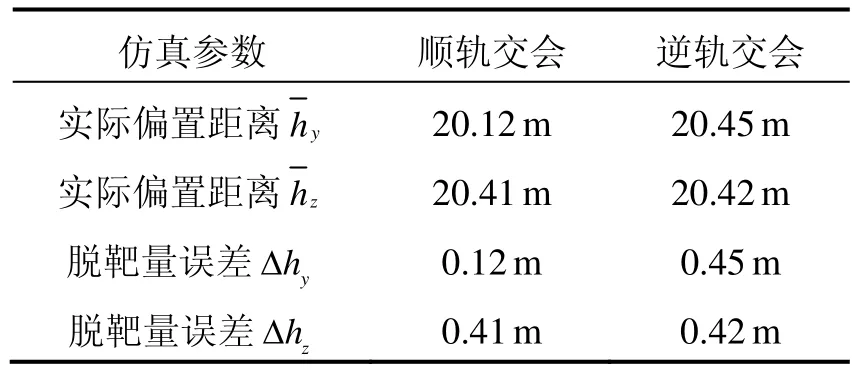
表4 脫靶量Tab.4 Miss distance
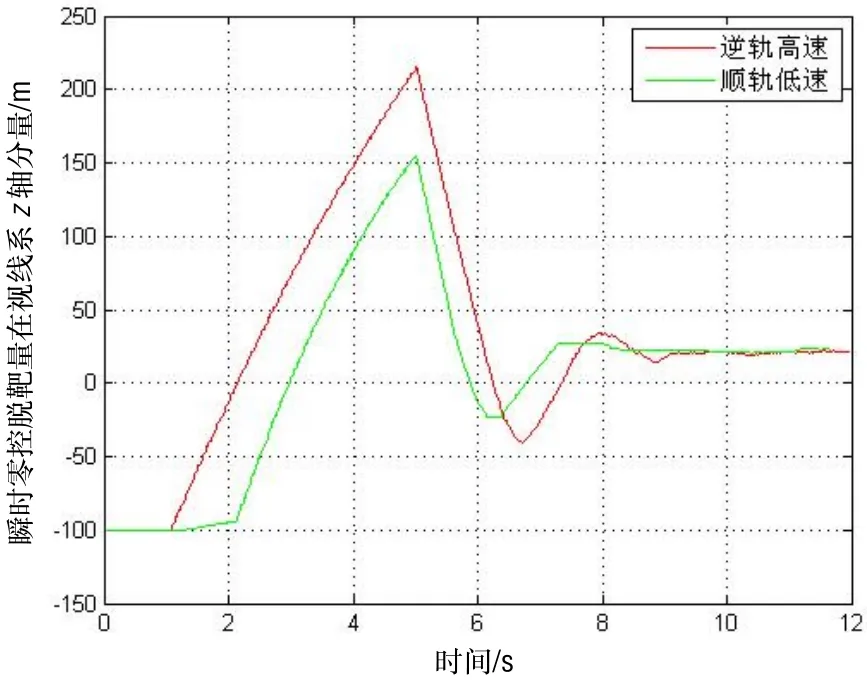
圖7 瞬時(shí)零控脫靶量在視線(xiàn)系z(mì)軸分量變化曲線(xiàn)Fig.7 Variation curve of z component of instant ZEM in LOS system
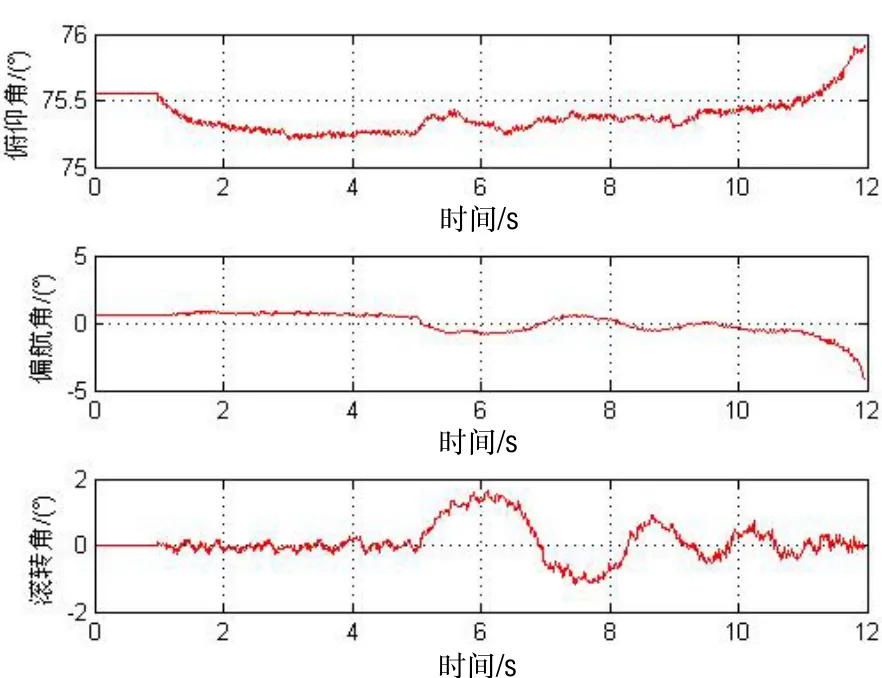
圖9 逆軌交會(huì)姿態(tài)角變化曲線(xiàn)Fig.9 Variation curve of attitude angle of inverse-rail intersection
[2] 張趙浩然. 基于伴隨方法的偏置導(dǎo)引末制導(dǎo)特性分析[D]. 哈爾濱: 哈爾濱工業(yè)大學(xué)控制與仿真中心, 2015.Zhang Z H R. Terminal guidance characteristic analysis of bias guidance based on adjoint method[D]. Harbin:Harbin Institute of Technology Control and Simulation Center, 2015.
[3] Liang Y, Zhao J G, Shen H R. Biased retro-proportional navigation law for interception of high-speed targets with angular constraint[J]. Defence Technology, 2014(10):60-65.
[4] Errer K S, Merttopcuoglu. Indirect impact-angle-control against stationary targets using biased pure proportional navigation[J]. Journal of Guidance, Control, and Dynamics,2012, 35(2): 700-703.
[5] Kim T H, Park B G. Bias-shaping method for biased proportional navigation with terminal angle constraint[J].Journal of Guidance, Control, and Dynamics, 2013, 36(6):1810-1816.
[6] Koray S E. Control of impact angle using biased proportional navigation[C]//Proceedings of the AIAA Guidance,Navigation, and Control Conference. 2013: 5113-5127.
[7] 高峰, 唐勝景, 師嬌, 等. 一種基于落角約束的偏置比例導(dǎo)引律[J]. 北京理工大學(xué)學(xué)報(bào), 2014, 34(3): 277-282.Gao F, Tang S J, Shi J, et al. A bias proportional navigation guidance law based on terminal impact angle constraint[J]. Transactions of Beijing Institute of Technology,2014, 34(3): 277-282.
[8] 顧家立, 陳萬(wàn)春. 一種帶導(dǎo)引頭視角和落角約束的導(dǎo)引方法[J]. 宇航學(xué)報(bào), 2013, 34(6): 782-787.Gu J L, Chen W C. Homing guidance with look angle and impact angle constraints[J]. Journal of Astronautics, 2013,34(6): 782-787.
[9] Zhang Y A, Ma G X. Guidance law with impact time and impact angle constraints[J]. Chinese Journal of Aeronautics, 2013, 26(4): 960-966.
[10] Lee C H, Kim T H, Tahk M J, et al. Polynomial guidance laws considering terminal impact angle/acceleration constraints[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(1): 74-92.
[11] 陸毓峰, 施志佳. 超前偏置導(dǎo)引律的探討[J]. 彈道學(xué)報(bào), 1992(11): 30-39.Lu Y F, Shi Z J. The study of proportional-navigation guidance law for leading of impact point[J]. Journal of Ballistics, 1992(11): 30-39.
[12] 王珂, 黨琳. 大氣層外攔截器偏置導(dǎo)引律設(shè)計(jì)[J]. 航空兵器, 2013(5): 26-29.Wang K, Dang L. Design of biased guidance law of exoatmospheric interceptor[J]. Aero Weaponry, 2013(5):26-29.
[13] Tekin R, Koray S E. Switched-gain guidance for impact angle control under physical constraints[J]. Journal of Guidance, Control and Dynamics, 2015, 38(2): 205-216.
[14] Yuan P J, Chern J S. Analytic study of biased proportional navigation[J]. American Institute of Aeronautics and Astronautics, 1992, 15(1): 185-190.
猜你喜歡
汽車(chē)維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車(chē)維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
汽車(chē)維修與保養(yǎng)(2020年11期)2020-06-09 05:42:06
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
汽車(chē)維護(hù)與修理(2016年3期)2016-02-28 13:16:54
汽車(chē)維修與保養(yǎng)(2015年1期)2015-04-17 03:25:30
汽車(chē)與新動(dòng)力(2015年1期)2015-02-27 12:11:01
汽車(chē)與新動(dòng)力(2014年6期)2014-02-27 12:10:49
汽車(chē)與新動(dòng)力(2014年5期)2014-02-27 12:10:41
汽車(chē)與新動(dòng)力(2014年2期)2014-02-27 12:10:15
 中國(guó)慣性技術(shù)學(xué)報(bào)2017年6期
中國(guó)慣性技術(shù)學(xué)報(bào)2017年6期
- 中國(guó)慣性技術(shù)學(xué)報(bào)的其它文章
- Modeling and analysis onoutput errors of precision linear vibration table
- 基于逆Gaussian過(guò)程的MEMS加速度計(jì)壽命融合預(yù)測(cè)方法
- 基于hp自適應(yīng)偽譜法的組合動(dòng)運(yùn)載器發(fā)射窗口拓展能力分析
- 微小衛(wèi)星聯(lián)合執(zhí)行機(jī)構(gòu)的遞階飽和姿態(tài)控制方法
- Effects of pump laser power and vapor cell temperature on SERF gyroscope
- 一種采用圓片級(jí)真空封裝的全硅MEMS三明治電容式加速度計(jì)