河道清理機器人收集機構的動力學建模與仿真
2018-01-19 11:23:13李曉星
機械設計與制造 2018年1期
關鍵詞:模型
李曉星
(浙江工貿職業技術學院,浙江 溫州 325003)
1 引言
經濟的快速發展使得社會物質文明高度進步,人們的生活有了質的飛躍,但是發展也帶來了各種各樣的環境問題,特別是我們人類賴以生存的水資源。我國水體污染日益加劇,社會影響巨大,造成的經濟損失更是無以估量。在經濟不斷發展的今天,人們已經越來越意識到環境保護的重要性,特別是水體保護的重要性,這不僅僅是美化我們的生活環境,創造更加適宜的生存空間,而且更是對經濟、對人們的日常生活有著十分深刻的影響。
通過查閱國內外相關河道清理機器人文獻[1-5],一般均通過燃油作為能源驅動,存在各種污染,國外現有的水面漂浮物清理機器人集水面漂浮物清理、油污水處理等多種功能,但是其體積相對較大,能耗大,使用成本高,不適合在狹窄河道、湖泊等水域清理。國內現有的景區湖泊、河道仍然停留在人工打撈階段,效率比較低,工作強度比較大。因此,我們設計了一款采用電源驅動的遠程河道清理機器人。
2 河道清理機器人的設計
新型遠程可視化河道漂浮物清理機器人是一種新型高科技環保產品,主要用于水面漂浮物(如漂浮垃圾)的打撈和收集工作,其自動化程度較高,能完成對各種水面漂浮垃圾遠程操控收集工作,其主要由船體推進機構、漂浮物收集機構、雙船體結構、平行四邊形控制的旋轉盤機構等組成,三維裝配示意圖,如圖1所示。
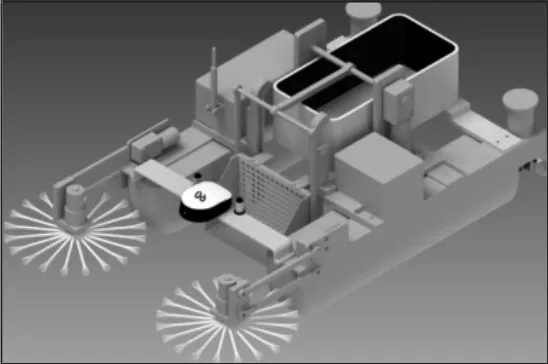
圖1 河道漂浮物清理機器人三維結構示意圖Fig.1 The Three-dimensional Structure Schematic of the River Floater Cleaning Robots
2.1 漂浮物收集機構設計
由于該機器人主要應用于河道、湖泊等水域,漂浮物上會粘附大量的水,其收集裝置不能采用簸箕類型,因此,我們設計為濾網式的收集鏟。該收集機構主要是由支撐架、電機、曲柄、連桿、濾網式收集鏟組合成。當漂浮物收集到一定體積時,觸碰限位開關,電機驅動電機帶動曲柄產生主動旋轉,通過連桿等一系列作用使得收集鏟把漂浮物從水面打撈到船上的回收艙中。該機構示意圖,如圖2所示。
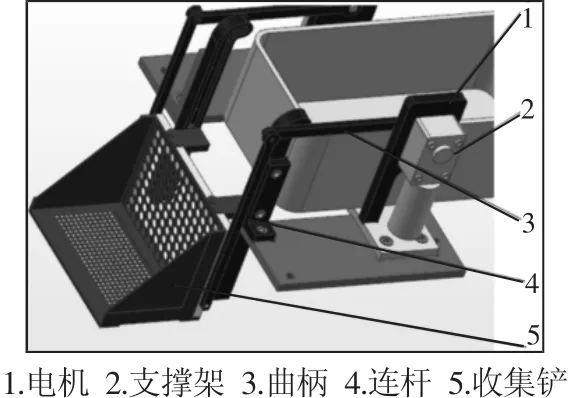
圖2 一種清理機器人的垃圾收集機構Fig.2 A Garbage Collection Mechanism for Cleaning Robots
2.2 船體推進機構
船體推進機構將動力裝置提供的動力轉換成船體前行的推力,從而驅動船體前行。常見的主要有主動式和反應式兩類[6]。采風力驅動等方式的為主動式,依靠槳輪、噴水、螺旋槳等為反應式。我們設計采用的是螺旋槳。轉向時不需要用舵控制,只需要調節電機轉速使兩側螺旋槳轉速即可達到轉向的效果,極易實現控制。
2.3 旋轉盤機構
增加水面垃圾自動打撈船的打撈面積,在船體前方增加兩個旋轉盤。由于收集鏟的收集面積有限,安裝位置僅為左右船體的中間空余部分,所以在左右船體前方安置兩個旋轉盤,以擴及到船體所經過位置的所有范圍。由于在水域中會有硬質物體,如小的暗礁等,會妨礙到旋轉盤的工作,因此設計時通過平行四邊形結構的可變性,來安裝旋轉盤。
3 收集裝置動力學建模分析
漂浮物收集機構的設計,直接影響到清潔機器人的工作效率,根據漂浮物收集裝置三維圖,繪制其機構運動簡圖,如圖3所示。可以看出該機構為一個四桿滑塊機構,其自由度為:F自=2。對于只有一個動力源確有2個自由度的機構來說其運動是不確定的,或者說是機構內部桿件的耦合造成了運動的不確定性,難以控制[7]。為了得到一組可靠的運動特性,必須將耦合的問題進行求解。下面建立該機構的動力學模型:
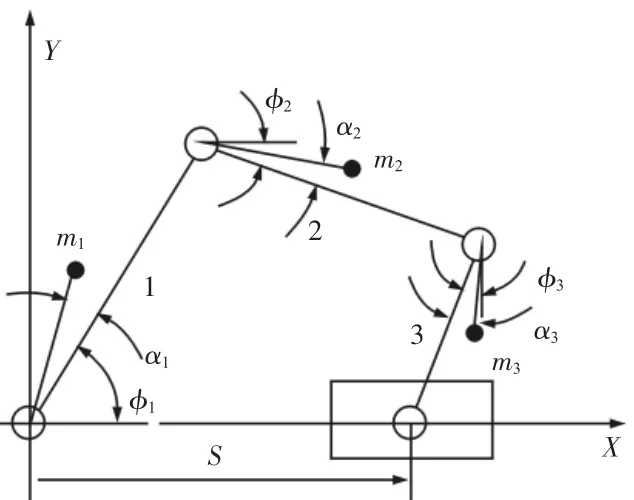
圖3 收集機構的示意圖Fig.3 Schematic Diagram of The Collection Mechanism
3.1 位置分析
首先進行位置分析,建立該機構的封閉矢量方程式,用復數矢量表示為[6]:l1eiφ1+l2ei(-φ2)+l3eiφ3=sei0(1)
式中:l1、l2、l3—桿 1、2、3 的長度;s—滑塊運動距離。
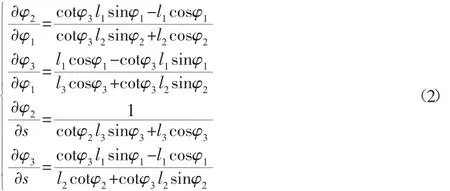
由于 φ2=φ2(φ1,s),j3=j3(j1,s),所以將式(1)分別對 φ2和 φ3求偏導數。按照歐拉公式展開,取實部和虛部分別相等可得:
3.2 速度分析
設各個構件的質心為Si,由原點到Sj的矢量為rsj,則有:
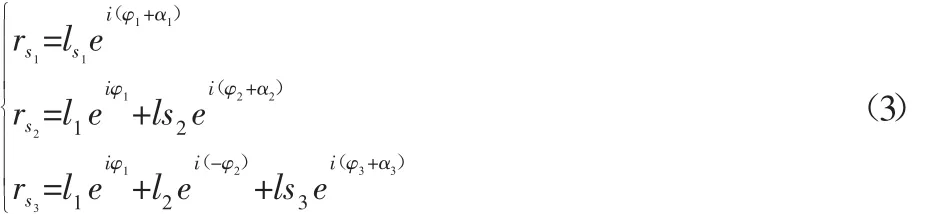
為了求得各個機構的速度和角速度,將式(3)各式兩邊同時對時間t求導,將速度表達式代入總動能表達式[8],簡化可得:

式中:A、B、C—簡化后系數。
由第二類拉格朗日方程,代入式(4)可得式(5)。此方程即為該機構的動力學方程。
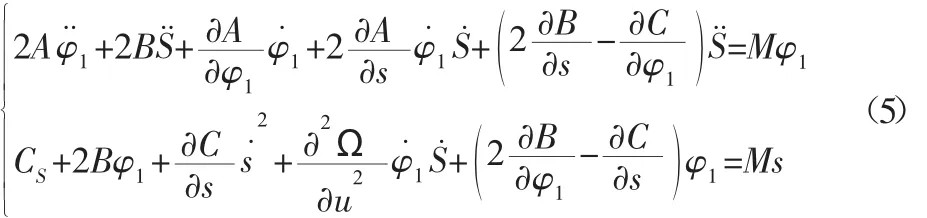
式中:Mφ1、Ms—外力轉化到構件1和4上的廣義驅動力矩。
4 動力學解耦分析
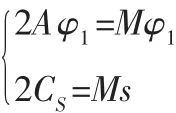
該機構動力學方程為二階非線性微分方程組。現在討論該方程的解耦問題。由于各桿件之間的角度與滑塊移動距離呈現非線性關系,導致各項相互影響產生耦合;同時,各桿件的質量分布也是產生耦合問題的一個因素[9]。式(5)表明,在運動過程中,機構各桿件的耦合直接影響其控制。系數B與角度和行程均相關,它是影響機構運動特性的最關鍵因素,若能使系數B值為零,就可以大大緩解耦合的情況,再適當配置質量就可以實現該機構的完全解耦。為了得到一種可行的運動方案。接下來就分析一種特殊的情況,使該機構完全解耦。假設代入式子(5),并利用式(2)得:
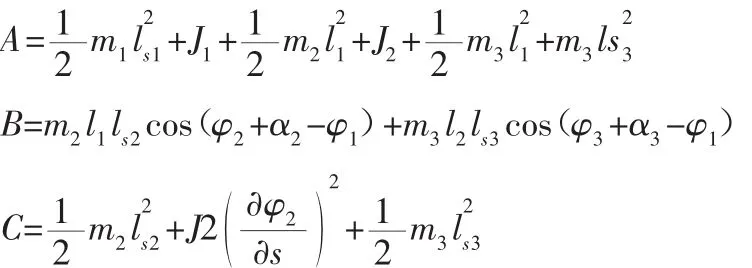
其中B是耦合項,若使得構件2、3該構件鉸接點連線上且φ2=φ3,則:B=0,于是改動力學方程可以解耦為:
5 動力學解耦模型檢驗
為了檢驗動力學模型建立的可靠性,運用動力學分析軟件ADAMS建立該虛擬模型樣機[10]。虛擬樣機模型在建立過程中需要造型尺寸、質量、轉動慣量、質心位置等物理特性參數,均用解耦所得的參數進行設定。構件之間的約束關系根據其物理樣機模型的約束關系直接進行定義,并添加構件之間的約束限制構件之間的相對運動。最后建立虛擬樣機仿真模型從而通過測量工具驗證模型。建立的模型并進行約束設定,如圖4所示。測量其中的φ1、s和φ3,當φ1從起始位置開始轉動過程中,s也在不斷增長,同時φ3也隨之變化且達到90°,即實現了翻轉,將垃圾傾倒出,如圖5所示。ADAMS的運動學仿真表明動力學模型的解耦可靠可行。與此同時,按照1:1的尺寸比例制造了實體模型,如圖6所示。
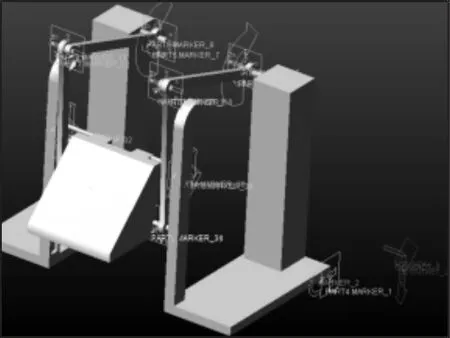
圖4 虛擬樣機模型Fig.4 The Model of The Virtual Prototype
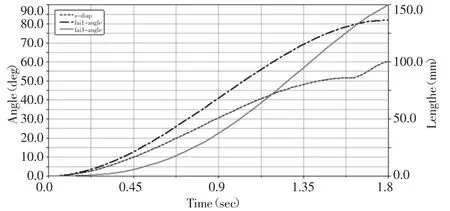
圖5 測量 φ1、s和 φ3的變化曲線Fig.5 The Change Curve of φ1,s And φ3

圖6 收集機構實物模型圖Fig.6 The Physical Model of The Collection Mechanism
6 樣機試驗
為了檢驗樣機工作的有效性。將樣機在真實的河道中進行模擬試驗。據統計河道中的漂浮物主要以樹葉、樹枝和瓶子等為主。于是試驗選定在寬度為10m的河道中截取10m長度,在100m2的范圍內均布散落一次性筷子(模擬樹枝)、樹葉、500ml礦泉水瓶子等標記漂浮物。根據河道漂浮物數量的不同和采集時間的不同,將試驗分成6組,每組試驗10次,分別給定10min和30min進行收集試驗,然后又模擬3種不同污染程度的河道,污染較重的河道中一次性筷子80根、樹葉200片、礦泉水瓶40個;中等污染的河道中一次性筷子20根、樹葉50片、礦泉水瓶10個;污染較輕的河道中一次性筷子5根、樹葉20片、礦泉水瓶2個。通過多次試驗,采集清理數據匯總,如圖7所示。從試驗數據可以看出,30min相比10min收集的成功率更高,10min的試驗除污染較輕的礦泉水瓶河道收集率均在70%以上,但30min的試驗中,整體的收集率均在93%以上。在累計60次的試驗中,收集機構均能正常工作,結構運行穩定,故障率為0。

圖7 試驗數據采集Fig.7 Test Data
7 小結
針對狹窄河道、湖泊設計了一款河道漂浮物清理機器人,其可以實現狹小水域的自動清理,平行四邊形機構上的旋轉盤將船體寬的范圍撥動到濾網式的收集鏟范圍,隨著螺旋槳驅動船體前行,漂浮物收集到一定程度,通過曲柄連桿組件實現漂浮物的回收。對于收集機構運動的不確定性,建立了動力學模型,對其存在的耦合問題進行解耦分析,得出了一種解耦模型,通過ADAMS動力學軟件驗證了該解耦模型的可行性,實物模型制作后,通過多次試驗,運行可靠,清理效果好,可廣泛應用于狹窄河道、湖泊、池塘等場所。
[1]王林沖.河溝清理機的研究與開發[J].科技縱橫,2013(4):45-46.(Wang Lin-Chong.River dredging machine research and development[J].Technology aspect,2013(4):45-46.)
[2]袁勝發.氣動式水面垃圾清理裝置的研究[J].液壓與氣動,2008(12):55-56.(Yuan Sheng-fa.Study on Pneumatic Surface Cleaner[J].Journal of Hydraulic and Pneumatics,2008(12):55-56.)
[3]邱成果.大峽水電廠庫區水面垃圾清理船的設計[J].船海工程,2003,(4):12-13.(Qiu Cheng-guo.Design of water surface garbage cleaners in reservoir area of Daxia Hydropower Station[J].Bohai Engineering,2003(4):12-13.)
[4]苗現華.新型河道清理船的設計[J].江西科學,2013,31(2):225-226.(Miao Xian-hua.Design of new river cleaning ship[J].Jiangxi Science,2013,31(2):225-226.)
[5]張玉新.水面垃圾清理船執行機構的仿真設計與研究[J].機械設計與制造,2011(4):62-64.(Zhang Yu-xin.Simulation design and research of actuating mechanism for refuse-removal vessel[J].Mechanical Design and Manufacture,2011(4):62-64.)
[6]盧俊.15000HP海洋油氣增產作業船推進系統設計及動力定位能力分析[J].航海工程,2017(2):135-138.(Lu Jun.Propulsion System Design and Dynamic Positioning Capability Analysis for 15 000 HP Well Stimulation Vessel[J].Ship&Ocean Engineering,2017(2):135-138.)
[7]趙博生.基于ADAMS的高速吹瓶機的運動學和動力學仿真[J].機械設計與制造,2012(10):77-79.(Zhao Bo-sheng.Kinematics and dynamics simulation of high-speed blow molding machine based on ADAMS[J].Mechanical Design and Manufacture,2012(10):77-79.)
[8]Hsiang-Chen Hsu,W.Y.C.,Shen-LiFu.Dynamic Finite Element Analysis onUnderlay Microstructure of Cu/low-K Wafer during Bonding Process,2005.
[9]沈惠平.并聯機構運動解耦設計方法與應用研究[J].農業機械學報,2016(6):348-356.(Shen Hui-ping.Study on decoupling design method and application of parallelmechanismmotion[J].JournalofAgriculturalMechanization,2016(6):348-356.)
[10]陳立平.機械系統動力學分析及ADAMS應用教程[M].北京:清華大學出版社,2005(1).(Chen Li-ping.Mechanical system dynamics analysis and ADAMS application tutorial[M].Beijing:Tsinghua University Press,2005(1).)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
