塔式起重機(jī)剛?cè)狁詈蟿?dòng)力學(xué)模型研究
2018-01-19 11:22:39曹旭陽(yáng)高順德
機(jī)械設(shè)計(jì)與制造 2018年1期
關(guān)鍵詞:系統(tǒng)
楊 悅,曹旭陽(yáng),高順德
(大連理工大學(xué) 機(jī)械工程學(xué)院,遼寧 大連 116024)
1 引言
塔式起重機(jī)系統(tǒng)是典型的欠驅(qū)動(dòng)系統(tǒng),而且重物的非線性運(yùn)動(dòng)又和臂架、塔身等具有大長(zhǎng)細(xì)比的柔性構(gòu)件的變形相互影響,增加了研究其動(dòng)力學(xué)模型的難度。研究塔式起重機(jī)的動(dòng)態(tài)響應(yīng)對(duì)指導(dǎo)其結(jié)構(gòu)的設(shè)計(jì)和提高安全性能具有重要意義,隨著塔式起重機(jī)小車運(yùn)行速度的提升和對(duì)重物移動(dòng)位置精確性要求的提高,對(duì)其動(dòng)力學(xué)特性進(jìn)行研究的需求更加迫切。目前對(duì)塔式起重機(jī)的動(dòng)力學(xué)特性研究主要將系統(tǒng)等效為多剛體系統(tǒng),集中于重物擺動(dòng)特性以及消擺控制方法的研究[1-4],而綜合考慮塔式起重機(jī)結(jié)構(gòu)特性對(duì)系統(tǒng)動(dòng)力學(xué)響應(yīng)的研究較少。文獻(xiàn)[5]綜合考慮了塔式起重機(jī)系統(tǒng)的剛度、阻尼、摩擦和空氣阻尼等因素,將系統(tǒng)等效成了集中質(zhì)量-彈簧系統(tǒng),建立了數(shù)學(xué)模型并進(jìn)行了實(shí)驗(yàn),研究了回轉(zhuǎn)運(yùn)動(dòng)產(chǎn)生的動(dòng)載荷對(duì)系統(tǒng)的影響。文獻(xiàn)[6]結(jié)合有限元方法和剛體運(yùn)動(dòng)學(xué)理論,研究了重物的擺動(dòng)和系統(tǒng)的柔性對(duì)系統(tǒng)動(dòng)力學(xué)響應(yīng)的影響。文獻(xiàn)[7]將塔式起重機(jī)等效為中心剛體-柔性臂模型,并用線性彈簧考慮拉桿對(duì)系統(tǒng)動(dòng)力學(xué)響應(yīng)的影響,應(yīng)用Hamilton原理推導(dǎo)了描述系統(tǒng)回轉(zhuǎn)和變幅運(yùn)動(dòng)的動(dòng)力學(xué)控制方程。文獻(xiàn)[8]將塔式起重機(jī)等效為平面柔性多體系統(tǒng),綜合考慮了臂架、塔身、平衡臂的柔性,僅針對(duì)回轉(zhuǎn)制動(dòng)工況進(jìn)行了動(dòng)力學(xué)分析。
綜上,隨著理論與技術(shù)的不斷發(fā)展,國(guó)內(nèi)外學(xué)者對(duì)塔式起重機(jī)的動(dòng)力學(xué)特性研究越來(lái)越深入,但目前建立的動(dòng)力學(xué)模型仍存在結(jié)構(gòu)或運(yùn)動(dòng)描述不全面等問(wèn)題,同時(shí)對(duì)理論模型的合理性的探討也比較少見(jiàn)。基于此,重點(diǎn)研究在塔式起重機(jī)臂架的柔性變形和系統(tǒng)非線性運(yùn)動(dòng)的綜合影響下,將臂架等效為Euler-Bernoulli梁并考慮臂架的自重和結(jié)構(gòu)阻尼,應(yīng)用拉格朗日方程和假設(shè)模態(tài)法建立完整描述塔式起重機(jī)變幅、回轉(zhuǎn)和起升運(yùn)動(dòng)的離散化動(dòng)力學(xué)方程。然后應(yīng)用Maple數(shù)學(xué)軟件對(duì)方程進(jìn)行數(shù)值求解并與動(dòng)力學(xué)仿真的結(jié)果進(jìn)行對(duì)比。
2 運(yùn)動(dòng)學(xué)描述
2.1 變量定義
文獻(xiàn)[7]主要考慮臂架的柔性和拉桿的影響,忽略塔身、平衡臂等結(jié)構(gòu)的柔性,并且不考慮鋼絲繩長(zhǎng)的變化,建立的塔式起重機(jī)動(dòng)力學(xué)模型,如圖1所示。柔性臂架等效為Euler-Bernoulli梁,在水平面內(nèi)回轉(zhuǎn)。以臂架回轉(zhuǎn)中心為原點(diǎn),臂架的中線方向?yàn)閄1軸建立固定坐標(biāo)系O1X1Y1,作為系統(tǒng)輸出參數(shù)的參照。O2X2Y2和O3X3Y3分別為固結(jié)在臂架根部和小車中心的浮動(dòng)坐標(biāo)系,用以定義臂架的變形和作大范圍剛體運(yùn)動(dòng)的參數(shù)。對(duì)于細(xì)長(zhǎng)梁,其縱向伸縮變形相對(duì)于豎直平面內(nèi)的彎曲變形要小很多;且塔式起重機(jī)臂架水平面內(nèi)的彎曲變形主要由慣性力引起,其相對(duì)于豎直平面內(nèi)的彎曲變形也可忽略不計(jì),故僅考慮臂架豎直平面內(nèi)的彎曲變形,設(shè)其為w(x,t)。假設(shè)臂架初始時(shí)刻中線和X1軸重合,由靜止開(kāi)始進(jìn)行回轉(zhuǎn)、變幅、起升運(yùn)動(dòng)。忽略臂架變形對(duì)小車相對(duì)運(yùn)動(dòng)的影響,即假設(shè)小車始終沿著X2軸運(yùn)動(dòng),在任意時(shí)刻t,描述系統(tǒng)的廣義坐標(biāo)為:小車相對(duì)于臂架根部的位移s(t),臂架相對(duì)于X1軸的回轉(zhuǎn)角度α(t);鋼絲繩相對(duì)于小車中心的長(zhǎng)度l(t),重物在Z3Y3平面內(nèi)的擺角和偏離平面的平面外擺角分別為 β(t)、γ(t);臂架在Z3X3平面內(nèi)橫向彎曲變形w(x,t)。為便于公式推導(dǎo),上述廣義坐標(biāo)中,前3個(gè)廣義坐標(biāo)描述塔式起重機(jī)大范圍剛體運(yùn)動(dòng),將其作為系統(tǒng)輸入量,記為向量 p=[x1,x2,x3]T;后 3個(gè)廣義坐標(biāo)為描述系統(tǒng)動(dòng)力學(xué)響應(yīng)的輸出量,記為向量q=[x4,x5,x6(x,t)]T。xi(i=1,2…6)是關(guān)于時(shí)間的函數(shù),記其關(guān)于時(shí)間的一階、二階導(dǎo)數(shù)分別為yi(i=1,2…6)、zi(i=1,2…6)。
2.2 構(gòu)件坐標(biāo)
臂架中線上任一點(diǎn)P1在浮動(dòng)坐標(biāo)系O2X2Y2下的坐標(biāo)用向量表示為:R1=[x 0 x6(x,t)]T(1)
小車在臂架上運(yùn)動(dòng),小車位置P2在浮動(dòng)坐標(biāo)系O2X2Y2下的坐標(biāo)為:

重物位置P3在浮動(dòng)坐標(biāo)系O3X3Y3下坐標(biāo)為:

設(shè)浮動(dòng)坐標(biāo)系O2X2Y2向慣性坐標(biāo)系O1X1Y1轉(zhuǎn)化的反對(duì)稱
經(jīng)過(guò)坐標(biāo)變換,Pi(i=1,2,3)在慣性坐標(biāo)系O1X1Y1的坐標(biāo)用ri(i=1,2,3)表示為:


圖1 塔式起重機(jī)動(dòng)力學(xué)模型示意圖Fig.1 Dynamic Model of a Tower Crane
2.3 構(gòu)件速度將式(5)對(duì)時(shí)間求導(dǎo),得各構(gòu)件速度為:
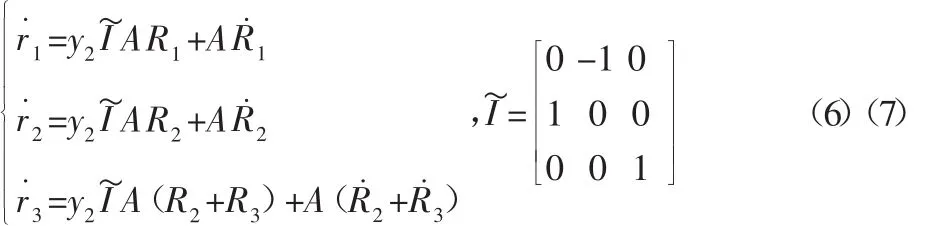
R˙i(i=1,2,3),Ri(i=1,2,3)表示對(duì)時(shí)間的一階導(dǎo)數(shù):

3 動(dòng)力學(xué)方程推導(dǎo)及其離散
3.1 方程推導(dǎo)
使用拉格朗日方程來(lái)建立系統(tǒng)大范圍運(yùn)動(dòng)規(guī)律已知的動(dòng)力學(xué)方程[9],向量形式的拉格朗日方程的基本形式為:

式中:T—系統(tǒng)動(dòng)能;V—系統(tǒng)勢(shì)能;q—系統(tǒng)廣義坐標(biāo)向量;F—廣
義力向量。對(duì)應(yīng)于,上式的廣義坐標(biāo)向量為q=[x4x5x6]T,
F=0。系統(tǒng)的動(dòng)能:

式中:等號(hào)右邊第一項(xiàng)為臂架的動(dòng)能,第二、三項(xiàng)分別為小車和重物
的動(dòng)能;ρ1—臂架的等效線密度;L1—臂架的長(zhǎng)度;m1、m2—小車和重物的質(zhì)量。將式(6)代入上式便可得到系統(tǒng)的動(dòng)能。
3.2 方程離散
采用假設(shè)模態(tài)法,將臂架任意點(diǎn)的橫向彎曲變形表示為:

經(jīng)過(guò)整理便可得到系統(tǒng)離散后矩陣形式的動(dòng)力學(xué)方程:

式中:M、K—(2+n)×(2+n)維矩陣,分別是離散系統(tǒng)的廣義質(zhì)量矩陣和廣義剛度矩陣;Q、G、Mi—(2+n)維列向量;Q—離散系統(tǒng)的輸出廣義坐標(biāo)向量;Q¨—其對(duì)時(shí)間的二階導(dǎo)數(shù);G—包括離心力、科式力和重力在內(nèi)的廣義力向量;Mi—與輸入廣義坐標(biāo)相關(guān)的廣義質(zhì)量向量。具體表達(dá)式為:

3.3 考慮結(jié)構(gòu)阻尼的離散方程

式中:C—(2+n)×(2+n)維矩陣,為系統(tǒng)的結(jié)構(gòu)阻尼矩陣;
Q˙—Q對(duì)時(shí)間的一階導(dǎo)數(shù),具體為:

考慮柔性梁的結(jié)構(gòu)阻尼時(shí),系統(tǒng)的動(dòng)力學(xué)方程變?yōu)椋?/p>
組合系數(shù)α和β計(jì)算公式為:

式中:ωi、ξi(i=1,2)—柔性梁的第一、第二階振動(dòng)頻率和相應(yīng)的阻尼比。
選取固定邊界懸臂梁的模態(tài)函數(shù),其元素為:

對(duì)應(yīng)固定邊界懸臂梁,其橫向彎曲振動(dòng)的固有頻率計(jì)算式:

將式(21)~式(25)代入式(20)便可得到考慮結(jié)構(gòu)阻尼的系統(tǒng)的離散動(dòng)力學(xué)方程。
4 數(shù)值計(jì)算與動(dòng)力學(xué)仿真
4.1 計(jì)算參數(shù)和仿真模型
上節(jié)推導(dǎo)得到了系統(tǒng)的離散動(dòng)力學(xué)方程,首先使用Maple數(shù)學(xué)軟件截取柔性梁的前二階模態(tài)進(jìn)行數(shù)值計(jì)算,然后與使用ADAMS進(jìn)行動(dòng)力學(xué)仿真的結(jié)果進(jìn)行了對(duì)比。塔式起重機(jī)的系統(tǒng)參數(shù),如表1所示。建立的塔式起重機(jī)ADAMS簡(jiǎn)化仿真動(dòng)力學(xué)模型,如圖2所示。模型中塔帽、臂架為柔性體,其余都為剛性體。

表1 系統(tǒng)參數(shù)表Tab.1 System Parameters
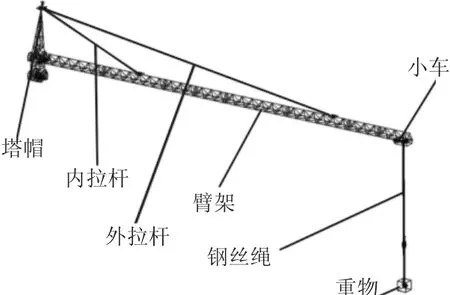
圖2 塔式起重機(jī)ADAMS動(dòng)力學(xué)模型Fig.2 ADAMS Simulation Model
數(shù)值計(jì)算和動(dòng)力學(xué)仿真針對(duì)文獻(xiàn)[10]中塔式起重機(jī)三種典型的運(yùn)動(dòng)形式,初始條件為小車距回轉(zhuǎn)中心60m,鋼絲繩長(zhǎng)度為20m。第一種形式臂架進(jìn)行先勻加速后勻速最后再勻減速的變幅運(yùn)動(dòng),加速時(shí)間為0.5s,勻速運(yùn)動(dòng)10s,減速時(shí)間為0.5s,勻速運(yùn)動(dòng)速度為0.9m/s。第二種形式,臂架同時(shí)進(jìn)行變幅和起升運(yùn)動(dòng),運(yùn)動(dòng)時(shí)間為10.5s,且都為先勻加速運(yùn)動(dòng)再勻速運(yùn)動(dòng),變幅加速時(shí)間0.5s,勻速運(yùn)動(dòng)速度0.9m/s,起升加速時(shí)間2.57s,勻速運(yùn)動(dòng)速度1.333m/s。第三種形式臂架進(jìn)行先勻加速后勻速最后再勻減速的回轉(zhuǎn)運(yùn)動(dòng),加速時(shí)間為13.67s,勻速運(yùn)動(dòng)時(shí)間為10s,減速運(yùn)動(dòng)3.6s,勻速運(yùn)動(dòng)角速度為3.78°/s。各運(yùn)動(dòng)速度函數(shù),如圖3所示。

圖3 變幅、回轉(zhuǎn)和起升運(yùn)動(dòng)速度函數(shù)Fig.3 Velocities of Luffing,Rotating and Lifting Motion Respectively
4.2 僅變幅運(yùn)動(dòng)時(shí)結(jié)果對(duì)比
僅變幅運(yùn)動(dòng)時(shí)的計(jì)算和仿真結(jié)果,如圖4所示。分析可知重物X方向位移的變化主要由變幅運(yùn)動(dòng)和重物的擺動(dòng)產(chǎn)生,計(jì)算和仿真的結(jié)果基本一致,8s以后的差異主要是由于重物平面內(nèi)擺角的差異造成。臂架豎直平面內(nèi)的橫向彎曲振動(dòng)引起了重物Z方向位移的變化,由計(jì)算和仿真得到的其變化的幅值和周期基本一致。與數(shù)值計(jì)算結(jié)果比較,仿真得到的重物平面內(nèi)擺角有周期性微幅的震蕩,且變化周期更長(zhǎng),這一差異主要是因?yàn)閿?shù)值計(jì)算中并未考慮臂架的軸向振動(dòng)。

圖4 僅變幅運(yùn)動(dòng)時(shí)重物運(yùn)動(dòng)響應(yīng)曲線Fig.4 Dynamic Response of the Payload When Luffing Only
4.3 同時(shí)變幅和起升運(yùn)動(dòng)時(shí)結(jié)果對(duì)比
同時(shí)進(jìn)行變幅和起升運(yùn)動(dòng)時(shí)的計(jì)算和仿真結(jié)果,圖略。起升運(yùn)動(dòng)和臂架的橫向彎曲振動(dòng)引起重物Z方向位移的變化,變化的周期和臂架的振動(dòng)周期一致。重物平面內(nèi)擺角仍有微幅的震蕩,且計(jì)算和仿真結(jié)果仍存在周期差異。另外,與第一種形式比較,起升運(yùn)動(dòng)引起了擺角幅值的增大和周期的縮短。
4.4 僅回轉(zhuǎn)運(yùn)動(dòng)時(shí)結(jié)果對(duì)比
僅回轉(zhuǎn)運(yùn)動(dòng)時(shí)的計(jì)算和仿真結(jié)果,圖略。比較可知,計(jì)算和仿真得到的重物X方向和Y方向位移的變化趨勢(shì)都幾乎一致。Z方向位移的變化在初始階段比較吻合,但隨著時(shí)間的增加,計(jì)算的結(jié)果較仿真的結(jié)果其幅值變小而周期變長(zhǎng)。另外,重物平面內(nèi)的擺角和平面外的擺角的振動(dòng)周期仍存在差異,且仿真得到的結(jié)果存在明顯的周期性震蕩,這種差異產(chǎn)生的主要原因仍然是由于計(jì)算過(guò)程中忽略了臂架的軸向振動(dòng)和水平面內(nèi)的橫向彎曲振動(dòng)。可知在回轉(zhuǎn)減速運(yùn)動(dòng)階段,重物平面外的擺角會(huì)迅速增大。
5 結(jié)論
(1)建立的動(dòng)力學(xué)模型可以完整地描述塔式起重機(jī)各種典型的運(yùn)動(dòng)過(guò)程,較準(zhǔn)確地跟蹤重物運(yùn)動(dòng)過(guò)程的位移響應(yīng)。(2)數(shù)值計(jì)算結(jié)果表明模型可以近似地反映重物平面內(nèi)和平面外的擺角響應(yīng),動(dòng)力學(xué)仿真結(jié)果還表明臂架的軸向振動(dòng)和水平面內(nèi)的橫向彎曲振動(dòng)會(huì)引起擺角的周期性微幅震蕩。(3)變幅運(yùn)動(dòng)和回轉(zhuǎn)運(yùn)動(dòng)都會(huì)引起重物平面內(nèi)的擺動(dòng)。回轉(zhuǎn)運(yùn)動(dòng)還會(huì)引起重物平面外的擺動(dòng),當(dāng)回轉(zhuǎn)快速制動(dòng)時(shí)會(huì)引起擺角的迅速增大。同時(shí)進(jìn)行變幅和起升運(yùn)動(dòng)時(shí),起升運(yùn)動(dòng)會(huì)引起重物擺動(dòng)幅值的增大和周期的縮短。的研究結(jié)果對(duì)研究塔式起重機(jī)的動(dòng)力學(xué)響應(yīng)和跟蹤重物軌跡、研究重物的擺動(dòng)規(guī)律具有重要的指導(dǎo)意義,同時(shí)對(duì)于研究大長(zhǎng)細(xì)比臂架類工作機(jī)構(gòu)的動(dòng)力學(xué)響應(yīng)也具有重要的參考價(jià)值。
[1]TZU-SUNG W,MANSOUR K,WEN-SHYONG Y.Anti-sway tracking control of tower cranes with delayed uncertainty[J].Fuzzy SETS and Systems,2015,1(10):1-20.
[2]KOUMBOULIS F N,NIKOLAOS D K,GIANNARIS G L.Independent motion control of a tower crane through wireless sensor[J].ISA Transactions,2015(11):1-9.
[3]DAVID B,JASON L,JON D.Radial-motion assisted command shapers for nonlinear rotational slewing tower crane[J].Control Engineering Practice,2010(18):523-531.
[4]王寶家,殷晨波.塔機(jī)位置與防擺控制研究[J].機(jī)械設(shè)計(jì)與制造,2015(1):165-168.(Wang Bao-jia,Yin Chen-bo.Research of tower crane’s position and antiswing control[J].Machinery Design&Manufacture,2015(1):165-168.)
[5]JERMAN B,PODRZAJ P,KRAMAR J.An investigation of slewing-crane dynamics during slewing motion-development and verification of a mathematical model[J].International Journal of Mechanical Sciences,2004(46):729-750.
[6]JU F,CHOO Y S,CUI F S.Dynamic response of tower crane induced by the pendulum motion of the payload[J].International Journal of Solids and Structures,2006(43):376-389.
[7]YANG Wen-qing,ZHANG Zhi-yi,SHEN Rong-ying.Modeling of system dynamics of a slewing flexible beam with moving payload pendulum[J].Mechanics Research Communications,2007(34):260-266.
[8]蘭朋,陸念力.塔式起重機(jī)柔性臂回轉(zhuǎn)制動(dòng)過(guò)程動(dòng)力分析[J].哈爾濱工業(yè)大學(xué)學(xué)報(bào),2004,36(5):677-680.(Lan Peng,Lu Nian-li.Dynamic analysis of flexible jib of tower crane in case of braking slewing motion[J].Journal of Harbin Institute of Technology,2004,36(5):677-680.)
[9]蔡國(guó)平,洪嘉振.旋轉(zhuǎn)運(yùn)動(dòng)柔性梁的假設(shè)模態(tài)方法研究[J].力學(xué)學(xué)報(bào),2005,37(1):48-56.(Cai Guo-ping,Hong Jia-zhen.Assumed mode method of a rotating flexible beam[J].ACTA Mechanica Sinica,2005,37(1):48-56.)
[10]呂玉蘭.塔式起重機(jī)操作培訓(xùn)模擬系統(tǒng)的研究與實(shí)現(xiàn)[D].大連:大連理工大學(xué),2015.(Lv Yu-lan.Research and implement of operation training simulation systemfortowercrane[D].Dalian:DalianUniversityofTechnology,2015.)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
