基于PID控制器的滾球控制系統(tǒng)設計與制作
2018-01-15 03:16:04李世甲李海龍藺瑞英
裝備制造技術 2017年11期
李世甲,萬 超,李海龍,藺瑞英
0 引言
2017年全國大學生電子設計競賽本科組B題要求設計制作一滾球控制系統(tǒng),在邊長為65 cm光滑正方形平板上均勻分布9個外徑3 cm的圓形區(qū)域,其編號為1-9號(從左至右依次排列),如圖1所示。系統(tǒng)通過控制平板的傾斜,使直徑不大于2.5 cm的小球能夠按照指定的要求在平板上完成動作,并從動作開始計時且顯示時間。要實現的基本要求如下:(1)在15 s內,控制小球從區(qū)域1進入區(qū)域5,在區(qū)域5停留不少于2 s.(2)控制小球從區(qū)域1進入區(qū)域4,在區(qū)域4停留不少于2 s,然后再進入區(qū)域5,小球在區(qū)域5停留不少于2 s.完成以上兩個動作總時間不超過20 s.(3)在30 s內,控制小球從區(qū)域1進入區(qū)域9,且在區(qū)域9停留不少于2 s.
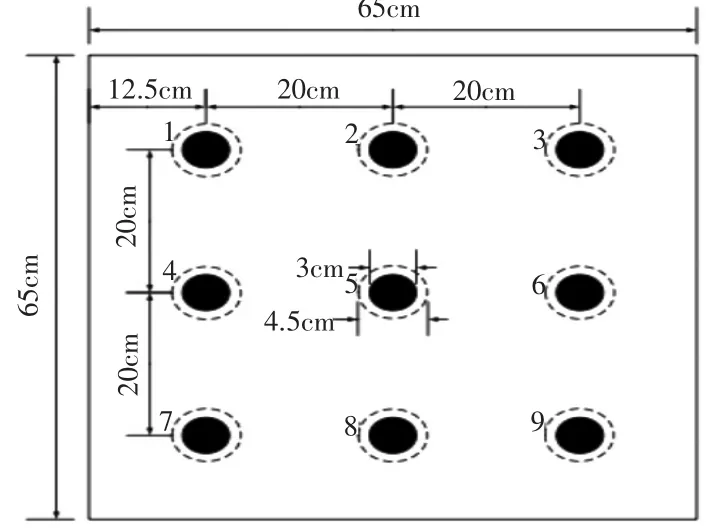
圖1 平板位置分布示意圖
本文研究的滾球控制系統(tǒng)在實現競賽題目要求的同時,可用于《機械電子工程專業(yè)導論》《機械控制工程基礎》《單片機原理及應用》等課程的實驗教學,或作為學生課外科技作品制作范例,提升學生專業(yè)知識學習興趣。
1 滾球控制系統(tǒng)設計
1.1 系統(tǒng)結構設計
根據要求,測控系統(tǒng)要使小球按照一定規(guī)律運動。本文通過切換6個啟動、復位按鍵實現3個題目要求的動作并在LCD液晶屏顯示動作時間。完成相應的控制任務,關鍵在于反饋信息的準確性和對步進電機的控制,為此將系統(tǒng)分為五個模塊,系統(tǒng)整體方案框如圖2所示。
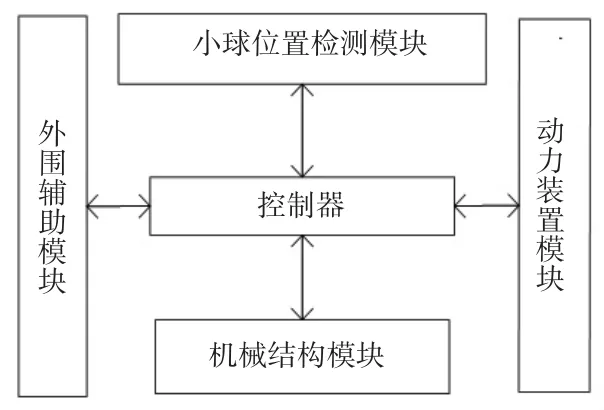
圖2 系統(tǒng)整體框圖
1.2 控制器模塊
控制器是整個控制系統(tǒng)的核心,承載著執(zhí)行控制算法,實現控制功能的作用。對于89C52單片機,原理簡單,成本低,綜合考慮后選擇其作為本控制系統(tǒng)控制器模塊[1]。
1.3 位置檢測模塊
由于購買的Chihod紅外線光電傳感器,最大測量范圍為30 cm,經測試及計算,其布置方式如圖3所示。S2和區(qū)域1的中心距距離為4 cm.
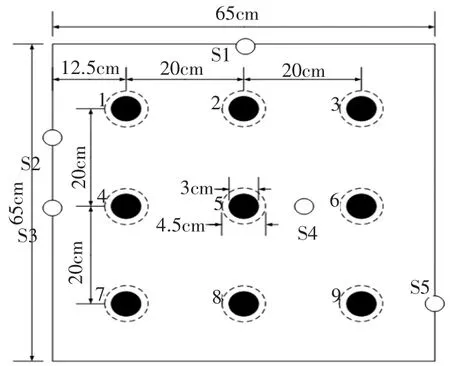
圖3 傳感器布置圖
1.4 動力裝置
動力裝置作為本控制系統(tǒng)中的執(zhí)行機構,其提供的動力是否充足、可調性是否優(yōu)良直接決定能否完成控制任務和控制質量的高低。在考慮了成本、體積、時效性等因素的基礎上選擇了28BYJ-48型步進電機,利用步進電機的正反轉控制木板翻轉。
1.5 外圍輔助模塊
本系統(tǒng)中的外圍輔助模塊,主要是指與對滾球的控制不起直接作用的功能調用模塊(按鍵)、顯示模塊(LCD1602液晶)、聲光提示模塊、數字式可調電源。
1.6 機械結構設計
系統(tǒng)的機械結構設計如圖4所示。平板1中間放置于萬向節(jié)3之上,萬向節(jié)3通過立柱4與底盤7相連接,平板1可在萬向節(jié)3之上360°擺動;電機5、6安裝在立柱上,同步帶2兩端系在平板1的孔內,并通過帶輪及聯軸器與電機5、6末端相連,通過電機的正反轉,可調節(jié)平板1的左右傾斜,通過電機5、6的聯動,可實現平板1的45°傾斜。光電模塊8安裝在平板1上,檢測小球通過的時間,并向控制系統(tǒng)反饋,從而改變電機轉速,用以控制小球速度。通過調節(jié)電機的轉速[2],實現平板的翻轉,通過平板的翻轉速度及角度,使小球按預設軌道運動,實現不同運動軌跡。制作的滾球控制系統(tǒng)實物如圖5所示。
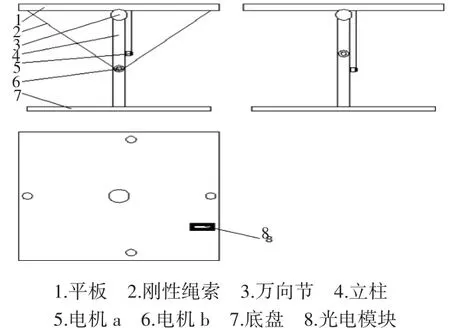
圖4 系統(tǒng)機械結構示意圖
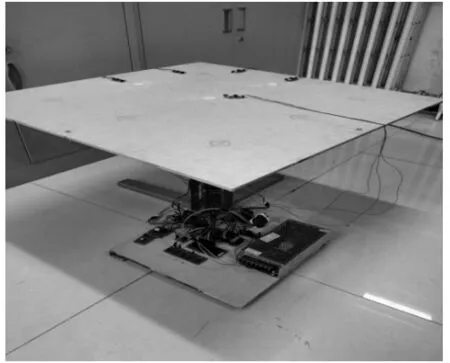
圖5 滾球控制系統(tǒng)實物圖
2 控制策略
2.1 PID控制
PID控制是將偏差的比例、積分和微分三者通過組合構成控制量。比例調節(jié)規(guī)律依據“偏差的大小”來動作,它的輸出變化量與輸人偏差成比例,調節(jié)平穩(wěn),作用及時,能有效地克服各種干擾,是最基本的調節(jié)規(guī)律,它的缺點是不能消除余差,因此只能用于那些對被調參數精度要求不高的場合。常用比例度Kp表示比例調節(jié)作用的強弱。Kp越小,表示比例增益越大,比例調節(jié)作用越強。同時,Kp越小,被調參數余差也越小,但調節(jié)系統(tǒng)穩(wěn)定性下降。常規(guī)的PID控制系統(tǒng)原理框圖如圖6所示[3]。
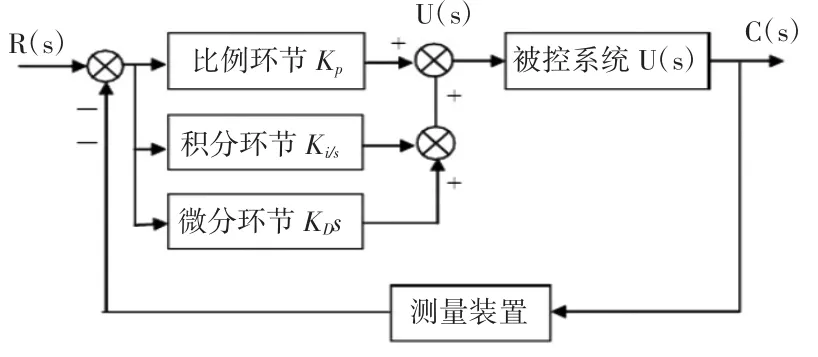
圖6 PID控制系統(tǒng)原理圖
2.2 控制系統(tǒng)實現
根據以上要求和PID原理,設計的滾球控制系統(tǒng)各部分的關系如圖7所示。單片機資源分配如圖8所示,LCD接線如圖9所示。LCD1602引腳連接方式如下:數據位D0~D7分別接單片機p0~p7,數據處理位 RS、RW、E 分別接單片機 p2.5~2.7,引腳 1(GND)和 16(K)接地,引腳 2(VCC)和 15(A)接電源正極。
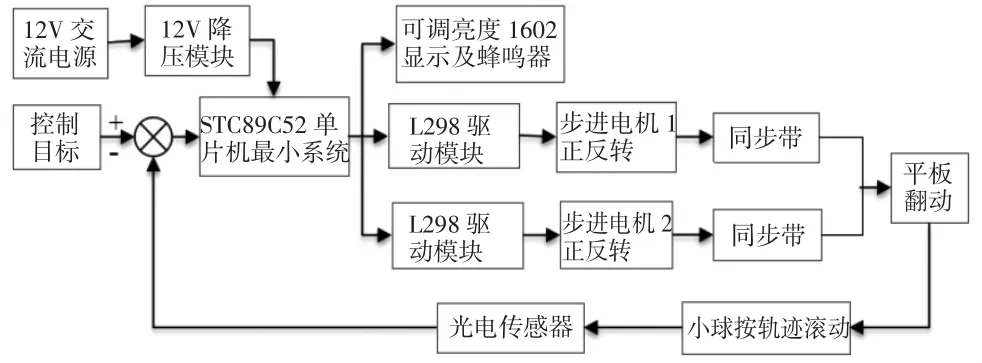
圖7 控制系統(tǒng)示意圖
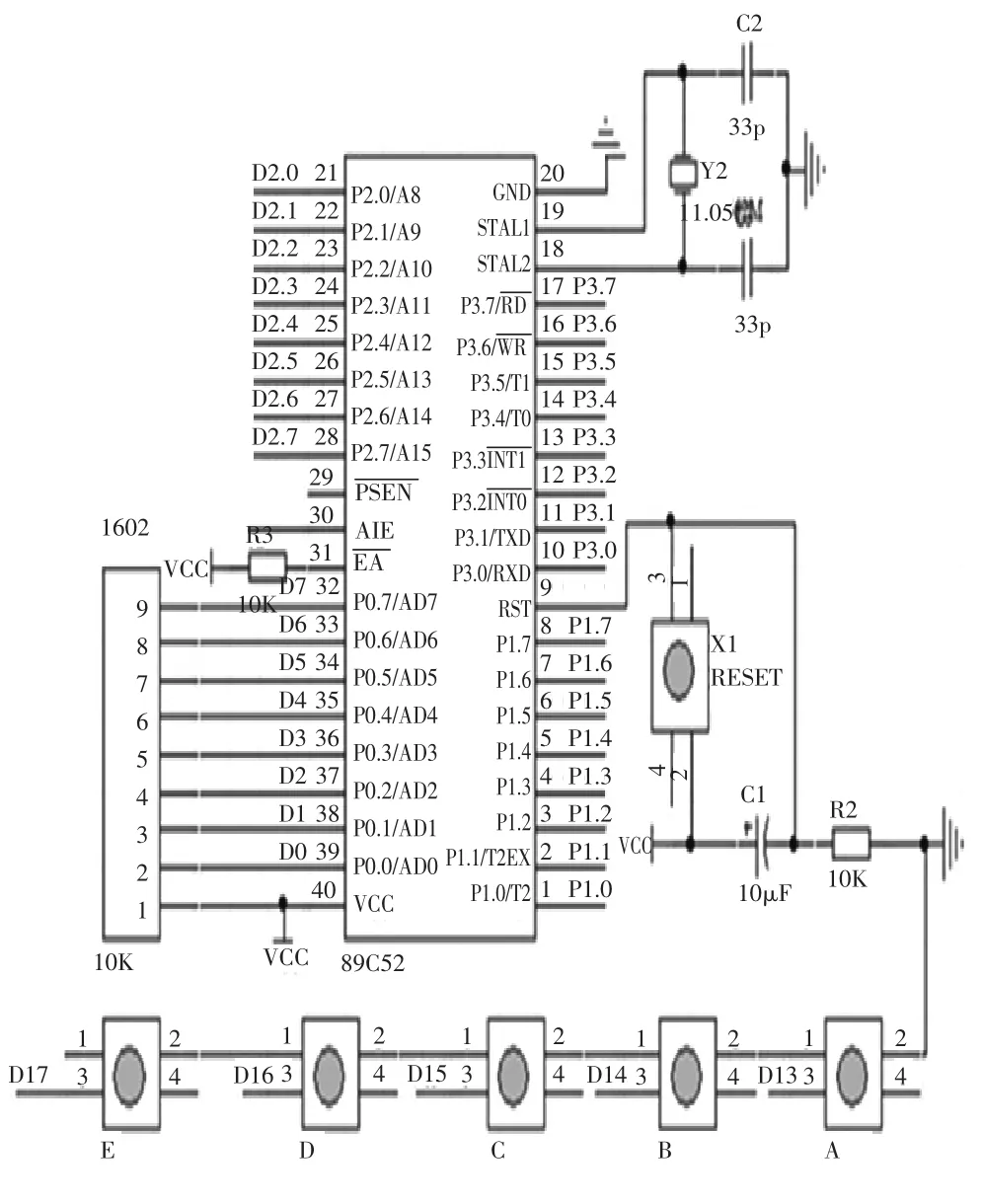
圖8 單片機資源分配圖
3 結論
所設計的控制系統(tǒng)經測試,可在規(guī)定時間內完成小球從1區(qū)進入5區(qū);從1區(qū)進入4區(qū),停留后進入5區(qū);小球從1區(qū)進入9區(qū)并停留。但是,誤差及穩(wěn)定性較差,原因是:(1)滾球控制系統(tǒng)機械結構受制作工藝所限,其剛度及穩(wěn)定性較差;(2)采用的控制方法過于簡單,控制不夠精確;(3)板材及小球的材質匹配不夠優(yōu)化。
[1]朱玉紅,林小軍.單片機原理與接口技術[M].北京:機械工業(yè)出版社,2013.
[2]湯蘊璆.電機學[M].5版.北京:機械工業(yè)出版社,2014.
[3]彭珍瑞,董海棠.控制工程基礎[M].2版.北京:高等教育出版社,2015.
猜你喜歡
當代工人(2020年8期)2020-05-25 09:07:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
兒童故事畫報·發(fā)現號趣味百科(2015年12期)2016-01-25 00:41:49
電測與儀表(2015年5期)2015-04-09 11:30:52
