混合動(dòng)力汽車(chē)駕駛風(fēng)格識(shí)別的研究?
2018-01-15 10:46:28郝景賢余卓平趙治國(guó)詹驍文沈沛鴻
汽車(chē)工程 2017年12期
郝景賢,余卓平,趙治國(guó),詹驍文,沈沛鴻
(1.同濟(jì)大學(xué)新能源汽車(chē)工程中心,上海 201804; 2.上汽大通汽車(chē)有限公司,上海 200438)
前言
駕駛風(fēng)格指駕駛員的習(xí)慣性駕駛方式[1]。研究表明,混合動(dòng)力汽車(chē)與傳統(tǒng)汽車(chē)一樣,其燃油經(jīng)濟(jì)性和排放性能受駕駛員的駕駛風(fēng)格影響較大[2-3]。因此,除駕駛員自身需要培養(yǎng)出良好的駕駛習(xí)慣外,在整車(chē)控制策略開(kāi)發(fā)過(guò)程中,對(duì)駕駛員駕駛風(fēng)格進(jìn)行有效識(shí)別,以增強(qiáng)整車(chē)對(duì)不同駕駛風(fēng)格的適應(yīng)性具有重要意義。
關(guān)于駕駛風(fēng)格對(duì)車(chē)輛燃油經(jīng)濟(jì)性的影響,國(guó)外學(xué)者開(kāi)展了諸多研究。其中,文獻(xiàn)[4]中通過(guò)建模仿真研究了駕駛員行為對(duì)某串聯(lián)式混合動(dòng)力大客車(chē)燃油經(jīng)濟(jì)性的影響,發(fā)現(xiàn)經(jīng)常急劇加減速的激進(jìn)型駕駛行為所造成的燃油消耗比正常型高60%。為獲得更好的燃油經(jīng)濟(jì)性,文獻(xiàn)[5]中通過(guò)仿真對(duì)幾種典型工況下的駕駛風(fēng)格進(jìn)行了優(yōu)化,發(fā)現(xiàn)趨于保守的駕駛風(fēng)格更節(jié)油,但會(huì)額外延長(zhǎng)行駛時(shí)間。
在駕駛風(fēng)格識(shí)別研究方面,國(guó)外采用了諸多方法,文獻(xiàn)[6]中對(duì)此進(jìn)行了總結(jié)。雖然方法各有不同,但總體上將駕駛風(fēng)格分為3類(lèi):冷靜(calm,soft或mild)型,正常(normal)型和激進(jìn)(aggressive,hard)型。其中,文獻(xiàn)[7]中以車(chē)速標(biāo)準(zhǔn)差和加速踏板踩踏速度標(biāo)準(zhǔn)差為基準(zhǔn),將駕駛風(fēng)格從最冷靜到最激進(jìn)程度進(jìn)行分類(lèi),并提出了一種基于單輸入單輸出的神經(jīng)網(wǎng)絡(luò)對(duì)駕駛風(fēng)格進(jìn)行識(shí)別的方法。文獻(xiàn)[8]中采用沖擊度結(jié)合典型工況下的平均沖擊度值來(lái)表征駕駛風(fēng)格并進(jìn)行在線識(shí)別。文獻(xiàn)[9]中利用k最近鄰算法、神經(jīng)網(wǎng)絡(luò)、決策樹(shù)和隨機(jī)森林等方法對(duì)駕駛員風(fēng)格進(jìn)行了識(shí)別。文獻(xiàn)[10]中搭建了一種基于數(shù)據(jù)挖掘和神經(jīng)網(wǎng)絡(luò)等人工智能技術(shù)對(duì)駕駛風(fēng)格進(jìn)行識(shí)別并提供駕駛建議的DrivingStyles軟硬件平臺(tái)。在國(guó)內(nèi)的研究文獻(xiàn)[11]和文獻(xiàn)[12]中,主要通過(guò)對(duì)駕駛員操作加速踏板和制動(dòng)踏板的動(dòng)作進(jìn)行分析,結(jié)合車(chē)速等參數(shù),通過(guò)模糊邏輯對(duì)駕駛員驅(qū)動(dòng)和制動(dòng)意圖進(jìn)行識(shí)別,將其細(xì)分為急加速、緩加速、低速巡航、高速巡航和緊急制動(dòng)等。
文中基于某款混合動(dòng)力汽車(chē),通過(guò)實(shí)車(chē)試驗(yàn)采集了表征駕駛風(fēng)格的相關(guān)參數(shù),采用主成分分析對(duì)參數(shù)進(jìn)行降維處理,應(yīng)用K-均值聚類(lèi)對(duì)駕駛風(fēng)格進(jìn)行分類(lèi),最后利用支持向量機(jī)對(duì)駕駛風(fēng)格進(jìn)行識(shí)別。所開(kāi)發(fā)的駕駛風(fēng)格分類(lèi)和識(shí)別方法可為自適應(yīng)駕駛風(fēng)格策略的制定奠定基礎(chǔ)。
1 混合動(dòng)力汽車(chē)駕駛風(fēng)格數(shù)據(jù)采集與分析
對(duì)駕駛風(fēng)格進(jìn)行分析和研究,須獲得與之密切相關(guān)的諸多數(shù)據(jù)。為獲得最真實(shí)的、最能反映駕駛風(fēng)格的數(shù)據(jù),進(jìn)行了專(zhuān)門(mén)的道路試驗(yàn)。考慮到實(shí)際道路環(huán)境和交通狀況等不可控因素變化對(duì)駕駛風(fēng)格的影響,在開(kāi)展駕駛試驗(yàn)前,須對(duì)試驗(yàn)路徑等試驗(yàn)條件進(jìn)行規(guī)劃,以盡量減小這些因素對(duì)駕駛員的影響。
1.1 樣車(chē)與行駛路線的選擇
試驗(yàn)車(chē)輛為某款四輪驅(qū)動(dòng)強(qiáng)混合動(dòng)力轎車(chē),其動(dòng)力系統(tǒng)框架如圖1所示。

圖1 混合動(dòng)力轎車(chē)動(dòng)力系統(tǒng)架構(gòu)
基于安全和資金考慮,沒(méi)有在高速公路和城區(qū)擁堵道路等環(huán)境進(jìn)行試驗(yàn),僅模擬城市郊區(qū)工況,從而分析識(shí)別駕駛員在郊區(qū)工況的駕駛風(fēng)格。駕駛員道路試驗(yàn)在校園內(nèi)進(jìn)行。為模擬城市郊區(qū)的駕駛環(huán)境,對(duì)試驗(yàn)路線進(jìn)行規(guī)劃,如圖2所示。
粗線部分即為整個(gè)試驗(yàn)路線。每一趟駕駛試驗(yàn)起止于圖中所示的A點(diǎn)。B點(diǎn)為校門(mén)口交叉路口,C點(diǎn)和D點(diǎn)為學(xué)生宿舍區(qū)域起止點(diǎn)(須低速行駛)。因此根據(jù)各點(diǎn)實(shí)際的道路交通環(huán)境,將整個(gè)路線分成4段,即AB段、BC段、CD段和DA段。AB段是從交通人流量較小處至交叉路口,BC段是從交叉路口至交通人流量較大處,CD段為交通人流量較大區(qū)域,DA段為交通人流量較大處至交通人流量較小處。這些路段覆蓋不同的交通人流量,因此所規(guī)劃的路線基本上可模擬真實(shí)的城市郊區(qū)駕駛環(huán)境。
1.2 試驗(yàn)數(shù)據(jù)的采集
試驗(yàn)過(guò)程中,采用圖3所示的系統(tǒng)采集與駕駛風(fēng)格相關(guān)的數(shù)據(jù)。

圖2 駕駛試驗(yàn)路線規(guī)劃
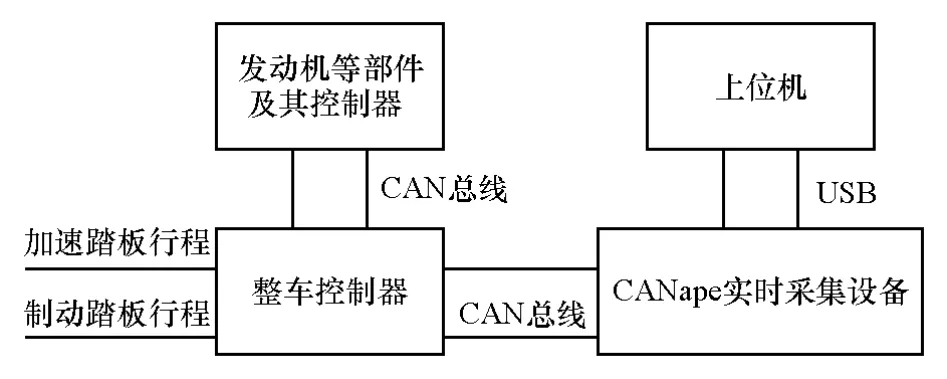
圖3 駕駛試驗(yàn)數(shù)據(jù)采集系統(tǒng)

表1 駕駛風(fēng)格特征參數(shù)及其測(cè)試數(shù)據(jù)
為研究駕駛風(fēng)格,須采集不同駕駛員在道路駕駛試驗(yàn)中的加速踏板行程、制動(dòng)踏板行程和車(chē)速等相關(guān)參數(shù)。文中選擇10位不同的駕駛員,開(kāi)展了實(shí)際道路駕駛試驗(yàn),共采集到有效試驗(yàn)數(shù)據(jù)樣本28組。
至于哪些參數(shù)能表征駕駛員風(fēng)格,目前還沒(méi)有統(tǒng)一的標(biāo)準(zhǔn)。文中利用表1所示的25個(gè)參數(shù)來(lái)表征駕駛風(fēng)格,相關(guān)數(shù)值也一并列出。
1.3 基于主成分分析的駕駛風(fēng)格特征參數(shù)
駕駛風(fēng)格相關(guān)表征參數(shù)眾多,導(dǎo)致計(jì)算和分析過(guò)程復(fù)雜,因此有必要采用主成分分析方法[13]對(duì)駕駛風(fēng)格特征參數(shù)進(jìn)行簡(jiǎn)化和降維處理。
車(chē)輛行駛過(guò)程中,以激進(jìn)型和平和型來(lái)區(qū)分駕駛員的風(fēng)格,有以下4種情況:加速激進(jìn)減速平和;加減速均激進(jìn);加速平和減速激進(jìn)和加減速均平和。因此,為便于分析,從表1的25個(gè)駕駛風(fēng)格參數(shù)各選取出與加速有關(guān)的參數(shù)19個(gè),與減速有關(guān)的參數(shù)10個(gè)。與加速有關(guān)的參數(shù)為:行駛時(shí)間t,最大車(chē)速vmax,平均車(chē)速 vmean,車(chē)速標(biāo)準(zhǔn)差 vsd,最大加速度amax,平均加速度amean,加速?zèng)_擊度平均值jamean,沖擊度標(biāo)準(zhǔn)差jsd,加速?zèng)_擊度最大值jamax,最大加速踏板行程Apmax,加速踏板行程平均值A(chǔ)pmean,加速踏板行程標(biāo)準(zhǔn)差A(yù)psd,加速踏板行程變化率最大值A(chǔ)prmax,踩加速踏板行程變化率平均值A(chǔ)prmeanp,松加速踏板行程變化率平均值A(chǔ)prmeanr,加速踏板行程變化率標(biāo)準(zhǔn)差A(yù)prsd,加速需求功率系數(shù)最大值pamax,加速需求功率平均值pamean和需求功率系數(shù)標(biāo)準(zhǔn)差psd共19個(gè);而與減速有關(guān)的參數(shù)為:行駛時(shí)間t,最大車(chē)速vmax,平均車(chē)速 vmean,車(chē)速標(biāo)準(zhǔn)差 vsd,最大減速度bmax,平均減速度bmean,減速?zèng)_擊度平均值jbmean,減速?zèng)_擊度最大值jbmax,減速需求功率系數(shù)最大值pbmax和減速需求功率平均值pbmean共10個(gè)。
利用SPSS軟件對(duì)加速時(shí)駕駛風(fēng)格參數(shù)構(gòu)成的樣本矩陣進(jìn)行主成分分析,得到19個(gè)主成分的貢獻(xiàn)率如圖4所示。
得到19個(gè)主成分的特征值碎石圖如圖5所示。
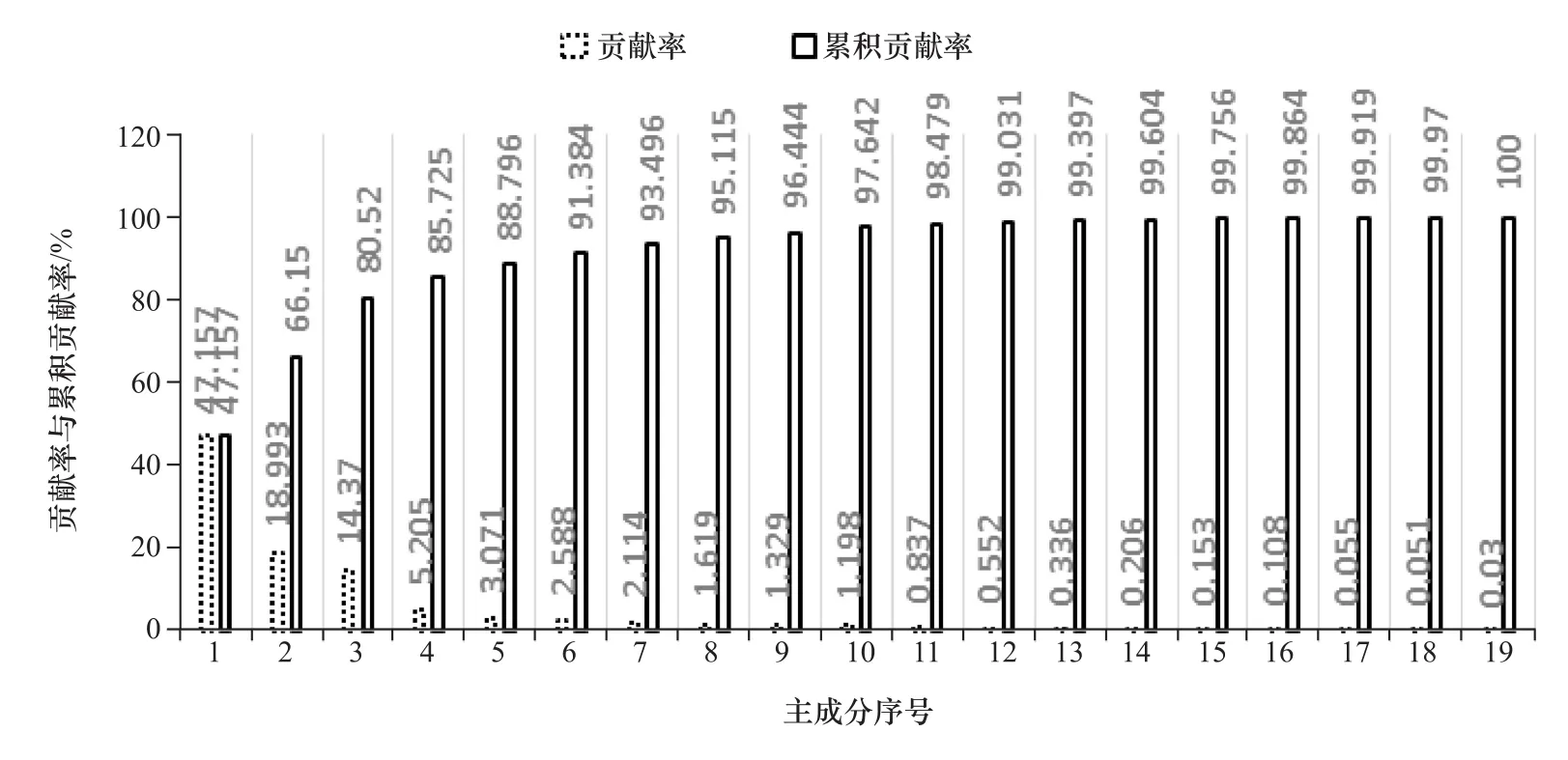
圖4 主成分貢獻(xiàn)率(加速時(shí))
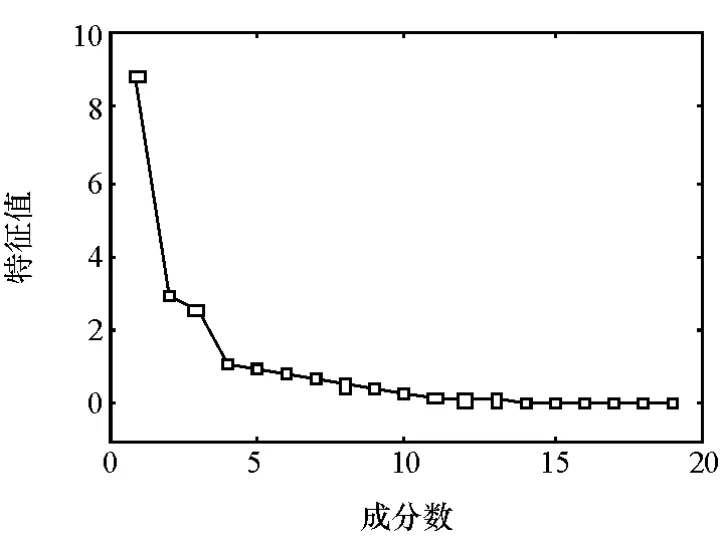
圖5 主成分的特征值碎石圖(加速時(shí))
從圖4可見(jiàn),前4個(gè)主成分的累計(jì)貢獻(xiàn)率為85.725%。按照累計(jì)貢獻(xiàn)率大于85%的要求,取前4個(gè)主成分就可以代表加速時(shí)駕駛風(fēng)格特征參數(shù)的絕大部分信息。同樣地,由圖5可知,按照特征值大于1的要求選擇主成分,可選擇前4個(gè)主成分。因此,前4個(gè)主成分能代表加速時(shí)表征駕駛風(fēng)格的所有特征參數(shù)。前4個(gè)主成分的得分如表2所示。主成分得分矩陣將用于聚類(lèi)分析。
同樣地,利用SPSS軟件對(duì)減速時(shí)駕駛風(fēng)格參數(shù)構(gòu)成的樣本矩陣進(jìn)行主成分分析,可選取前3個(gè)主成分作為駕駛風(fēng)格的特征參數(shù)。主成分得分矩陣如表2所示。
1.4 駕駛風(fēng)格特征參數(shù)的聚類(lèi)分析
1.4.1 聚類(lèi)分析
本文中采用基于劃分的 K-均值聚類(lèi)分析方法[14]根據(jù)經(jīng)主成分分析處理后的駕駛風(fēng)格特征參數(shù)(分加速和減速)值相近的原則對(duì)28個(gè)樣本進(jìn)行分類(lèi)。
1.4.2 駕駛風(fēng)格分析
采用SPSS軟件對(duì)表2中在加速情況下的樣本進(jìn)行聚類(lèi)分析,并設(shè)置類(lèi)別數(shù)為2,得到的聚類(lèi)結(jié)果如圖6所示。其中聚類(lèi)結(jié)果1和2分別表示第1類(lèi)和第2類(lèi)駕駛風(fēng)格。
對(duì)聚類(lèi)后兩類(lèi)樣本進(jìn)行分析,得到第1和第2類(lèi)共19個(gè)加速時(shí)駕駛風(fēng)格特征參數(shù),見(jiàn)表3。
從表3可見(jiàn),在駕駛車(chē)輛時(shí),加速時(shí)第2類(lèi)駕駛風(fēng)格體現(xiàn)出車(chē)速高、車(chē)速變化快、沖擊度大、沖擊度變化快、加速踏板行程大、踩加速踏板速度快、需求功率系數(shù)大和需求功率系數(shù)變化快的特點(diǎn),這種駕駛風(fēng)格即為加速激進(jìn)型駕駛風(fēng)格。與此對(duì)比,第1類(lèi)駕駛風(fēng)格體現(xiàn)出的各特征參數(shù)較小且變化較慢,這種駕駛員風(fēng)格即為加速平和型駕駛風(fēng)格。
同樣地,采用與加速工況下駕駛風(fēng)格分析同樣的方法,得到減速平和型和減速激進(jìn)型駕駛風(fēng)格的聚類(lèi)結(jié)果,分別以第1類(lèi)和第2類(lèi)表示。結(jié)果如圖7所示。
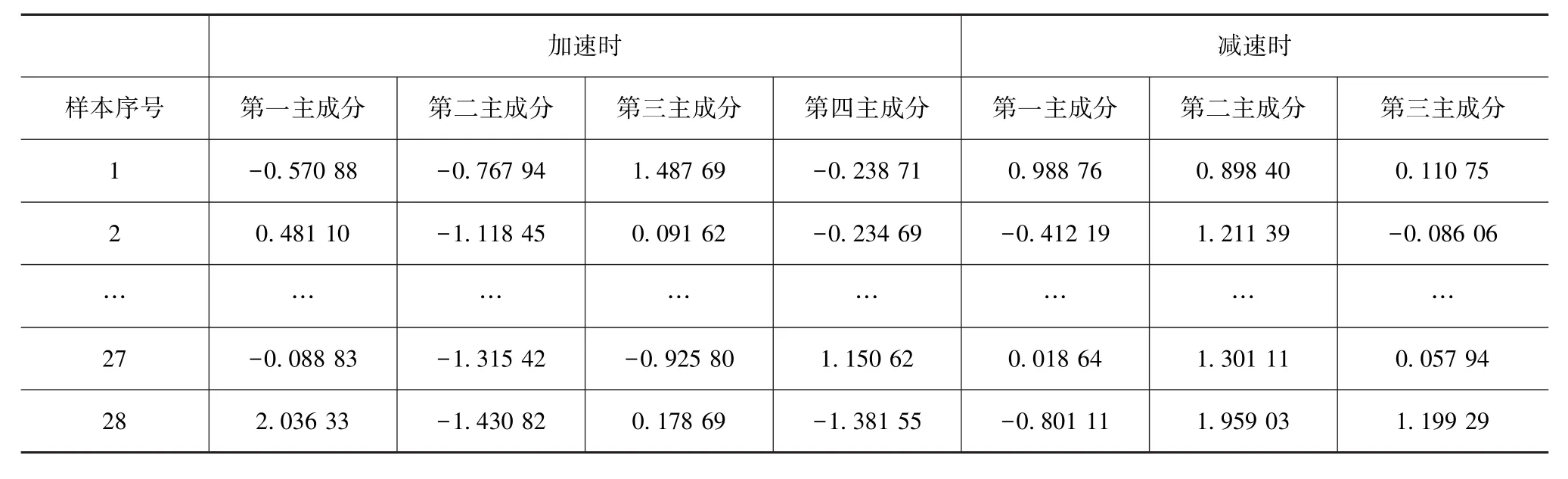
表2 主成分得分(加速和減速)
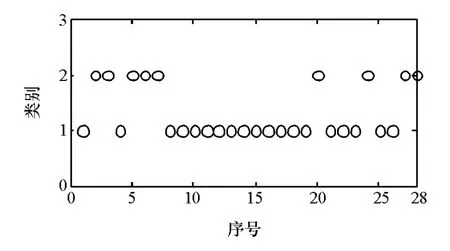
圖6 駕駛風(fēng)格聚類(lèi)結(jié)果(加速時(shí))
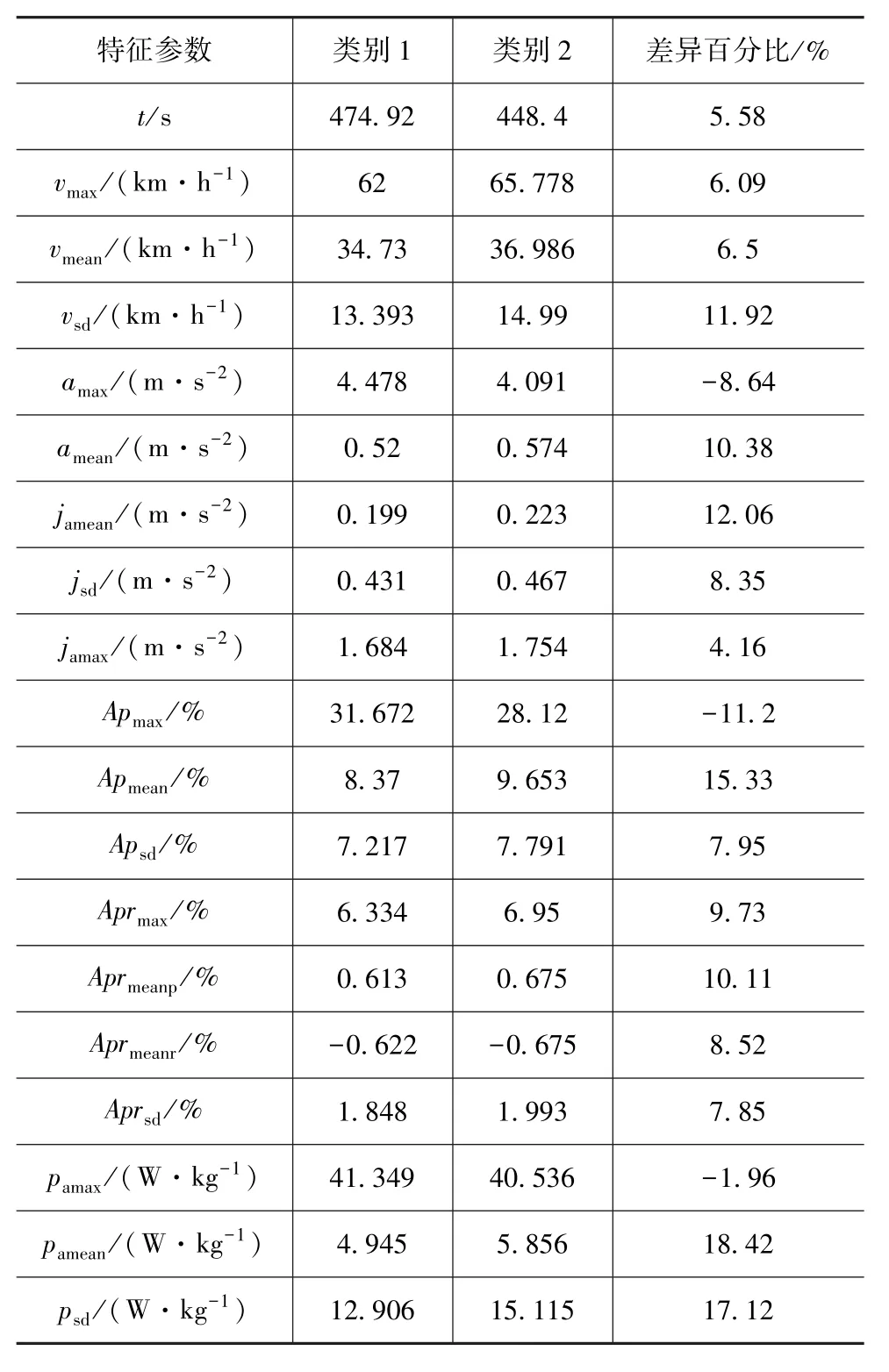
表3 第1類(lèi)和第2類(lèi)駕駛風(fēng)格特征參數(shù)(加速)
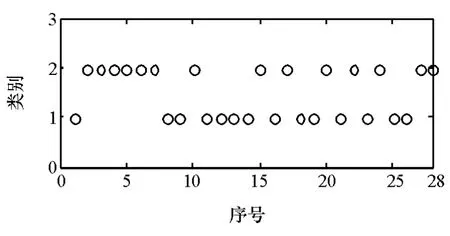
圖7 駕駛風(fēng)格聚類(lèi)結(jié)果(減速時(shí))
將加速和減速情況下的駕駛風(fēng)格進(jìn)行綜合,可得到28個(gè)樣本所體現(xiàn)出的3種駕駛風(fēng)格:加減速平和型、加速平和減速激進(jìn)型和加減速激進(jìn)型,分別記為-1,0和1,如圖8所示。三者分別占總數(shù)的50%,17.86%和32.14%。
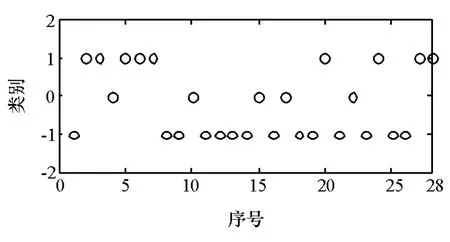
圖8 綜合駕駛風(fēng)格聚類(lèi)結(jié)果
2 基于支持向量機(jī)方法的駕駛風(fēng)格識(shí)別
支持向量機(jī)[15]在解決小樣本、非線性和高維模式識(shí)別中表現(xiàn)出許多特有的優(yōu)勢(shì),因此適合于駕駛風(fēng)格分類(lèi)識(shí)別的要求。
2.1 基于支持向量機(jī)方法的駕駛風(fēng)格識(shí)別
通過(guò)聚類(lèi)分析已得到28個(gè)樣本中每一個(gè)樣本所屬的類(lèi)別,并將屬于同一種駕駛風(fēng)格的樣本組合在一起。在此基礎(chǔ)上進(jìn)行數(shù)據(jù)處理,構(gòu)造滿足支持向量機(jī)算法要求的矩陣,其數(shù)據(jù)如表4所示。將加速與減速時(shí)平和型駕駛風(fēng)格和激進(jìn)型駕駛風(fēng)格類(lèi)別分別記為1和2。
分別采用表4中的數(shù)據(jù)構(gòu)造各類(lèi)別的訓(xùn)練集和測(cè)試集。對(duì)于加速情況,28個(gè)樣本中,前19個(gè)樣本為第1類(lèi),剩下的9個(gè)樣本為第2類(lèi)。取第1類(lèi)的1-10樣本、第2類(lèi)的20-24樣本為訓(xùn)練集,取第1類(lèi)的11-19樣本、第2類(lèi)的25-28樣本為測(cè)試集。采用訓(xùn)練集對(duì)支持向量機(jī)網(wǎng)絡(luò)進(jìn)行學(xué)習(xí)訓(xùn)練后,對(duì)未參與學(xué)習(xí)的測(cè)試集所屬類(lèi)別進(jìn)行識(shí)別。識(shí)別結(jié)果如圖9所示。
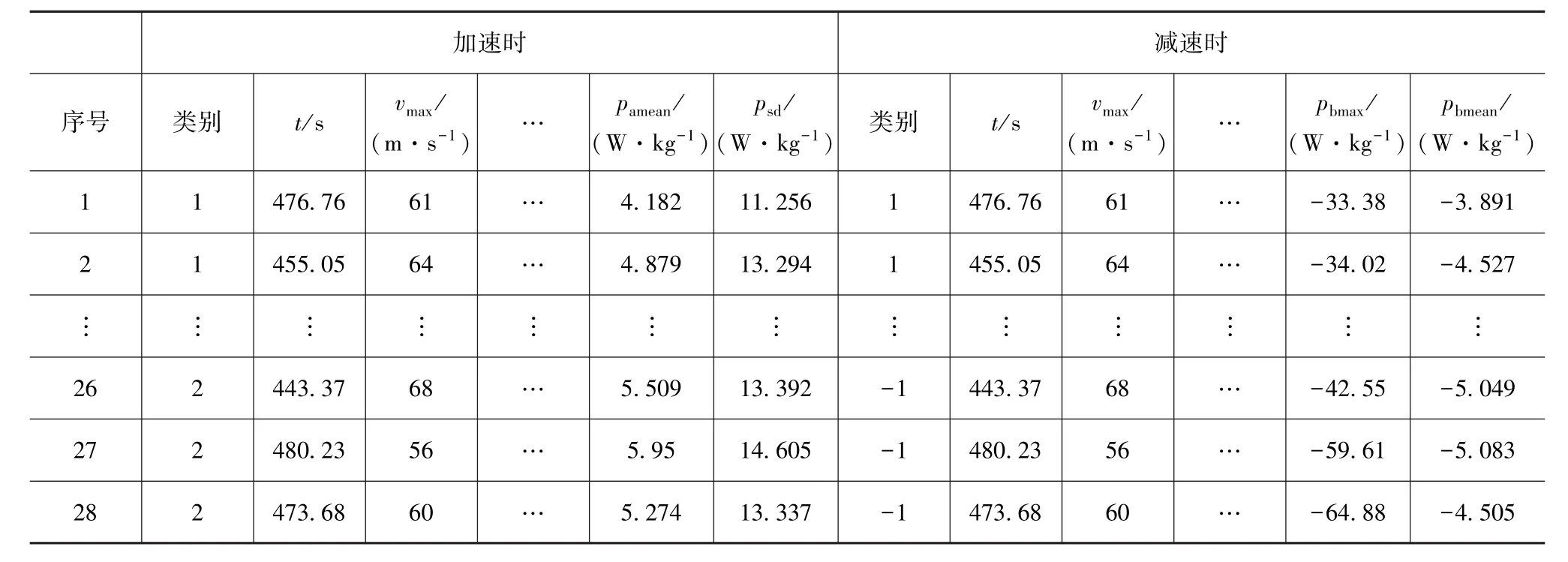
表4 用于識(shí)別的駕駛風(fēng)格特征參數(shù)(加速和減速時(shí))
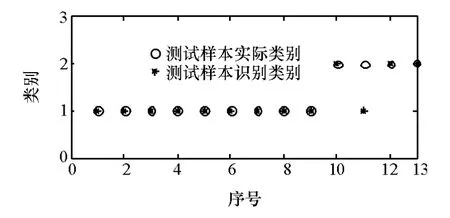
圖9 駕駛風(fēng)格支持向量機(jī)識(shí)別結(jié)果(加速時(shí))
在減速情況下,前14個(gè)樣本為第1類(lèi),剩下的14個(gè)樣本為第2類(lèi)。取第1類(lèi)中的1-7樣本、第2類(lèi)的15-21樣本為訓(xùn)練集,以第1類(lèi)的8-14樣本、第2類(lèi)的第22-28樣本為測(cè)試集。識(shí)別結(jié)果如圖10所示。
由圖9和圖10可知,運(yùn)用支持向量機(jī)方法分別對(duì)加速和減速情況下的駕駛風(fēng)格進(jìn)行識(shí)別,在加速情況下僅有樣本26的激進(jìn)型風(fēng)格錯(cuò)誤識(shí)別為平和型風(fēng)格,在減速情況下僅有樣本10的平和型風(fēng)格錯(cuò)誤識(shí)別為激進(jìn)型風(fēng)格。總體的識(shí)別準(zhǔn)確率達(dá)90%以上。因此,支持向量機(jī)方法對(duì)于駕駛風(fēng)格的識(shí)別是有效和準(zhǔn)確的。

圖10 駕駛風(fēng)格支持向量機(jī)識(shí)別結(jié)果(減速時(shí))
根據(jù)圖8可知28個(gè)樣本中每一個(gè)樣本的綜合駕駛風(fēng)格。將加減速平和型加速平和減速激進(jìn)型與加減速激進(jìn)型3類(lèi)駕駛風(fēng)格類(lèi)別分別記為-1,0和1,并對(duì)樣本進(jìn)行重新排序,將相同類(lèi)別的樣本放在一起。構(gòu)造滿足支持向量機(jī)算法要求的矩陣,如表5所示。
取類(lèi)別為-1的1-7樣本、類(lèi)別為0的15-19樣本、類(lèi)別為1的20-24樣本為訓(xùn)練集,取類(lèi)別為-1的8-14樣本、類(lèi)別為0的15-19樣本、類(lèi)別為1的25-28樣本為測(cè)試集。圖11為測(cè)試集樣本的實(shí)際類(lèi)別與支持向量機(jī)方法的識(shí)別結(jié)果。從圖中可以看出,支持向量機(jī)方法對(duì)3類(lèi)樣本的識(shí)別準(zhǔn)確率達(dá)15/16=93.75%。
綜上所述,基于小樣本駕駛風(fēng)格特征參數(shù),采用支持向量機(jī)方法對(duì)駕駛風(fēng)格進(jìn)行識(shí)別,無(wú)論是對(duì)于加速或減速時(shí)的兩類(lèi)駕駛風(fēng)格問(wèn)題,還是對(duì)于加減速時(shí)的3類(lèi)駕駛風(fēng)格問(wèn)題,支持向量機(jī)方法的識(shí)別準(zhǔn)確率達(dá)到90%以上。因此支持向量機(jī)方法對(duì)于駕駛風(fēng)格的識(shí)別具有良好的效果。

表5 用于識(shí)別的駕駛風(fēng)格特征參數(shù)(加減速時(shí))
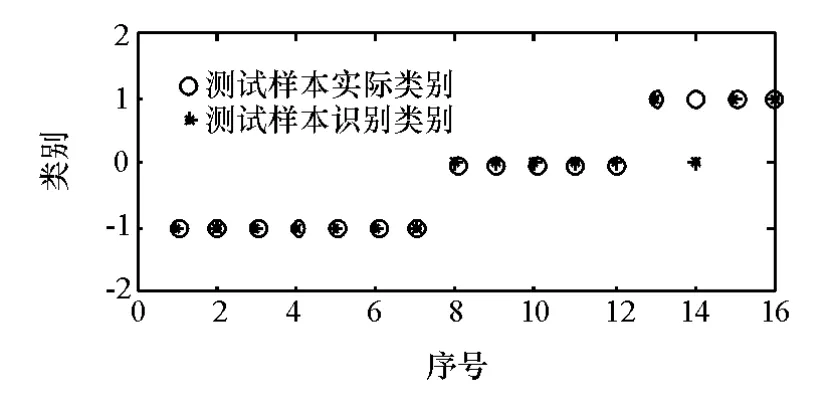
圖11 綜合駕駛風(fēng)格支持向量機(jī)識(shí)別結(jié)果
3 結(jié)論
(1)通過(guò)實(shí)車(chē)試驗(yàn)采集了表征駕駛風(fēng)格的相關(guān)參數(shù),采用主成分分析實(shí)現(xiàn)了對(duì)參數(shù)的降維和簡(jiǎn)化處理,應(yīng)用K-均值聚類(lèi)分析對(duì)駕駛風(fēng)格進(jìn)行分類(lèi),最后利用支持向量機(jī)對(duì)駕駛風(fēng)格進(jìn)行識(shí)別。結(jié)果表明,駕駛風(fēng)格的識(shí)別準(zhǔn)確率達(dá)到了90%以上。
(2)通過(guò)駕駛風(fēng)格主成分分析、聚類(lèi)分析和支持向量機(jī)識(shí)別,可構(gòu)建一套駕駛風(fēng)格識(shí)別的有效方法,并可將其應(yīng)用于混合動(dòng)力汽車(chē)的控制策略優(yōu)化中。對(duì)于識(shí)別出的不同駕駛風(fēng)格,采取不同的控制策略,從而為駕駛風(fēng)格自適應(yīng)控制策略的開(kāi)發(fā)奠定基礎(chǔ)。
[1] ELANDER J,WESTR,F(xiàn)RENCH D.Behavioral correlatesof individual differences in road-traffic crash risk:an examinationmethod and findings[J].Psychological Bulletin,1993,113(2):279-294.
[2] SON J,PARKM,WON K,et al.Comparative study between Korea and UK:relationship between driving style and real-world fuel consumption[J].International Journal of Automotive Technology,2016,17(1):175-181.
[3] FONSECA G N, CASANOVA K J, ESPINOSA Z F.Influence of driving style on fuel consumption and emissions in diesel-powered passenger car[C].Proceedings 18thInternational Symposium Transport and Air Pollution,2010.
[4] ZORROFIS, FILIZADEH S, ZANETEL P.A simulation study of the impact of driving patterns and driver behavior on fuel economy of hybrid transit buses[C].Vehicle Power and Propulsion Conference,2009.VPPC'09.IEEE,2009:572-577.
[5] MALIKOPOULOS A,AGUILAR P.Optimization of driving styles for fuel economy improvement[C].International IEEE Conference on Intelligent Transportation Systems.IEEE,2012:194-199.
[6] WANG R,LUKIC M.Review of driving conditions prediction and driving style recognition based control algorithms for hybrid electric vehicles[C].Vehicle Power and Propulsion Conference.IEEE,2011:1-7.
[7] AUGUSTYNOWICZ A.Preliminary classification of driving style with objective rank method[J].International Journal of Automotive Technology,2009,10(5):607-610.
[8] MURPHEY L,MILTON R,KILIARIS L.Driver's style classification using jerk analysis[C].Computational Intelligence in Vehicles and Vehicular Systems,2009.CIVVS'09.IEEE Workshop on.IEEE,2009:23-28.
[9] KARGINOVA N,BYTTNER S,SVENSSONM.Data-drivenmethods for classification of driving styles in buses[C].SAE World Congress,2012.
[10] JAVIER M,CARLOSC,JUAN C,et al.Characterizing the driving style behavior using artificial intelligence techniques[J].IEEE,2011,978-1-53682.
[11] 王慶年,唐先智,王鵬宇,等.基于神經(jīng)網(wǎng)絡(luò)的混合動(dòng)力汽車(chē)駕駛意圖識(shí)別方法[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2012,43(8):32-36.
[12] 王英范,寧國(guó)寶,余卓平.乘用車(chē)駕駛員制動(dòng)意圖識(shí)別參數(shù)的選擇[J].汽車(chē)工程,2011,33(3):213-216.
[13] 程鐵信,吳浩剛,孫錫衡.一種基于主成分分析的評(píng)標(biāo)方法[J].系統(tǒng)工程理論與實(shí)踐,2010,20(2):118-121.
[14] 馮超.K-means聚類(lèi)算法的研究[D].大連:大連理工大學(xué),2007.
[15] 鄧乃揚(yáng),田英杰.數(shù)據(jù)挖掘中的新方法——支持向量機(jī)[M].北京:科學(xué)出版社,2004.
猜你喜歡
車(chē)主之友(2022年6期)2023-01-30 07:58:16
汽車(chē)實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車(chē)實(shí)用技術(shù)(2022年7期)2022-04-20 11:44:42
汽車(chē)實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車(chē)實(shí)用技術(shù)(2019年17期)2019-09-21 03:46:32
汽車(chē)電器(2018年1期)2018-06-05 01:22:54
黃河之聲(2017年13期)2017-01-28 13:30:17
教育界·下旬(2016年4期)2016-11-19 22:15:52
公民與法治(2016年4期)2016-05-17 04:09:26