六輪獨立懸掛越野車懸掛的設計與仿真
2018-01-12 05:18:04譚殷飛職山杰通訊作者卞慶元徐偉勝
信息記錄材料 2018年3期
譚殷飛,職山杰(通訊作者),易 鑫,卞慶元,徐偉勝
(蘇州大學應用技術學院 江蘇 蘇州 215325)
1 引言
本文是針對一種六輪越野車設計的獨立懸掛。該型越野車屬于電動車輛。電動車輛的系統結構與燃油車完全不同。電動汽車系統包括有機械系統、電源系統和電子控制系統。機械系統由車身、底盤、驅動裝置、變速器和電池箱體組成。
本文研究的越野車是采用輪轂電機驅動的電動汽車結構,這種結構使用低速外轉子電動機,電機外轉子直接與車輪相連,車速完全由電機的轉速控制。該車一共擁有六個獨立懸掛。車身通過懸掛與輪轂電機連接,懸掛上端由減速箱提供扭矩,可使輪臂在垂直面內做旋轉運動,六輪的組合使車體具備升降、俯仰、側傾、原地旋轉等功能。它的這種姿態主動調整的特性增加了越野車的野外通過性能。國外獨立六輪電驅動結構較為成熟,應用度廣,典型的有洛克希德馬丁公司的MULE平臺,美國卡內基·梅隆大學的Spinner和Crusher平臺[1]。國內對于電驅式車輛也有較多研究,上海燃料電池汽車動力系統與同濟大學汽車學院一同研發的四輪轂電驅動車輛春暉三號,功率較小不具有實用性[2],北京航空航天大學機器人研究所研發的全地形平臺具有一定的通過性,但是扭力桿的結構只具有一定扭動程度,它被動適應的性能決定了地形通過性遠遠不如主動適應的獨立懸掛平臺。
懸掛是車輛最重要的功能之一,他連接車輪與車體。負責整車的支撐和緩沖。車輛要實現行駛、轉彎、制動的功能,必須將車身和車輪連接在一起。這就要求懸掛必須適應車輛重量和裝載質量的變化。車輛要對不同路況產生相應驅動力、轉彎側向力和制動力等。懸掛需要具備足夠的強度和耐久性,車輛行駛的平穩性,可靠性完全由懸掛裝置來決定,懸掛的設計對越野車來說具有重要作用。
2 六輪獨立懸掛越野車懸掛的設計
2.1 懸掛的選擇
懸掛把車身與車輪連接起來,以實現支撐、定位、限位、緩沖等功能。一般來說,懸掛系統可分為以一根軸連接的剛性車軸式懸架和左右兩輪可獨立的運動式懸掛。剛性車軸式懸掛結構簡單,承載力大,不過束角和外傾角設計的自由度小,乘坐舒適性不好,簧下質量偏大而且兩端車輪極易引起側向振動。獨立式懸掛使左右兩輪分別相連于車體,因此,可以盡量減小貨箱底板距地面的高度,其簧下質量小,接地性好,缺點是結構較為復雜,成本相較于剛性車軸較高。重載貨車的懸掛多采用板簧式,商用車則多用拉桿式懸掛。
6X6全地形越野車屬于野外高機動車輛,車重1.5t,載荷1t,采用獨立懸掛。野外地形復雜,就以叢林來講,土坡、水潭隨處可見,灌木碎石充盈道路,要在這樣的道路上面行駛,車輛必須有較好的通過性。為了增加車輛通過性可以增加底盤高度,擴大車寬。該6X6型越野車將傳統底部懸掛側置,大大拓寬了車體空間,組合動作可使車輛具備俯仰,搖擺,升降的額外功能,大大增加了車輛的通過性。懸掛下端與輪轂電機鉸接,上端通過軸承固定于車體上并通過聯軸器與減速箱相連。野外行駛中路面凹凸不平,減速箱輸出扭矩轉動懸掛從而越過障礙物。
2.2 基于Solidworks的獨立懸掛設計
懸掛要求能主動控制并組合運動,上端由減速箱提供扭矩,下端用法蘭與輪轂電機相連。一端由一對軸承固定,另一端懸置,類似于懸臂梁。所以,根部強度要足夠大,而懸置端可適當減少材料,減輕重量。法蘭與輪轂連接處采用圓角過渡,減緩根部應力集中現象。懸掛的主干部分設計了多處斜角,減小了應力突變,使載荷能較為均勻的分布于懸掛主體。
3 基于Solidworks的靜應力仿真
3.1 有限元分析
使用simulation模塊進行有限元分析,材料選用合金鋼。 用實體化網格劃分,如圖1所示。

圖1 懸掛有限元模型
3.2 邊界處理
懸掛鉸接在輪轂電機上,約束鉸接孔的四個面。
4 懸掛有限元分析結果
4.1 懸掛應力分布
根據分析結果可知,懸掛上端伸出軸的根部應力最大,通過軸承的那一部分軸,應力最小。這是由于軸承反力作用在伸出軸上,內應力集中在軸的根部。
4.2 變形分布
圖2為懸掛變形分布情況。整個形變自上而下呈現由大到小漸變式的分布。變形量最大的是伸出軸的頂端,變形量最小的在懸掛主干和法蘭相接處。這是由于法蘭為全約束,載荷全部分布在伸出軸段。
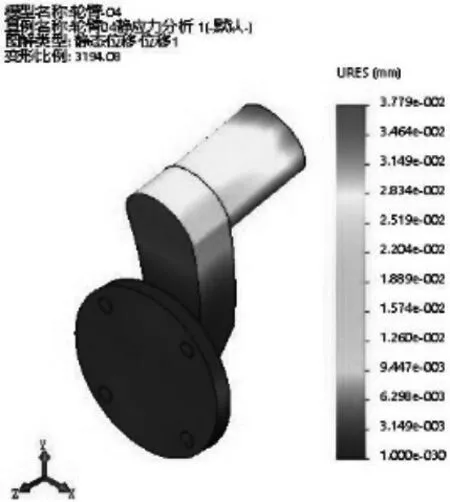
圖2 懸掛受力變形分布
4.3 安全系數分布
取8倍安全系數分布作為極限沖擊載荷。懸掛設計完全在安全系數以內,所以在使用過程中是安全的。
5 結語
(1)懸掛結構作為車輛最重要的承重部件,研究懸掛的應力、形變情況具有重要意義。
(2)Solidworks環境下的Simulation模塊功能強大,在一定程度上反應了懸掛實際受力情況。
(3)根據有限元分析結果顯示,總重2.5T的越野車滿載情況下,能抗擊8倍沖擊,安全性能較好。
[1]張韜懿,王田苗,吳耀,等.全地形無人車的設計與實現[J].機器人,2013,6(35):657-664.
[2]曹藝輝,趙言正,付莊.無人車獨立懸掛系統設計與仿真[J].機電一體化,2012:17-21.
[3]陳陽.基于有限元技術的重型汽車懸架力學分析[J].現代制造技術與裝備,2016,9:68-70.
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
