主動懸架非脆弱H∞控制器設計
2018-01-09 03:21:55王蘇磊
重慶理工大學學報(自然科學) 2017年12期
馬 克,米 林,譚 偉,王蘇磊
(重慶理工大學 車輛工程學院, 重慶 400054)
主動懸架非脆弱H∞控制器設計
馬 克,米 林,譚 偉,王蘇磊
(重慶理工大學 車輛工程學院, 重慶 400054)
考慮車輛建模不確定性和執行器參數不確定性,基于2自由度1/4車輛模型設計主動懸架的非脆弱H∞控制器,使懸架加速度、懸架動擾度、輪胎形變量得到優化。非脆弱H∞控制器通過LMI(linear matrix inequality,線性矩陣不等式)算法求解,并在Matlab7.0/Simulink環境下搭建仿真模型進行仿真分析。研究結果表明:該控制器能有效改善車輛的乘坐舒適性,較好地解決平順性與操縱穩定性之間的矛盾。
主動懸架;非脆弱H∞控制器;線性矩陣不等式
汽車懸架會對汽車整體的舒適性和安全性產生較大影響。傳統的被動懸架性能只能在一定頻率范圍內起作用,而主動懸架能隨環境的變化主動調整控制力的大小,使懸架始終處于最佳的減震狀態,體現出極大的優越性。由于車輛行駛環境的不確定性,主動懸架的魯棒控制策略受到越來越多的關注[1-2]。文獻[3]采用2自由度1/4模型,基于線性矩陣不等式的方法,提出了一種考慮參數不確定性的魯棒H2/H∞控制器設計方法。文獻[4]采用7自由度整車模型,設計了基于LMI(線性矩陣不等式)算法的主動懸架H2/H∞多目標輸出反饋控制器,實現了較好的平順性和操縱穩定性。文獻[5]考慮懸架系統的參數攝動與高階未建模不確定性,基于LFT(線性分式變換)設計出μ綜合控制器,仿真結果表明乘坐舒適性有很大提升。
傳統的魯棒控制往往只考慮了參數攝動和高階未建模不確定性,在實際系統中,微處理器內存和字長的限制以及A/D、D/A轉換誤差等原因都可能引起控制無法準確實現,造成控制器出現攝動[6]。文獻[7-8]指出:現有的魯棒控制設計方法對控制器參數的微小攝動具有高敏感性,因此需要同時考慮系統參數和控制器的不確定性,構造出一種非脆弱的控制器,使主動懸架更穩定地運行。文獻[9]基于執行機構的不確定性,為主動懸架設計出一種非脆弱H∞控制器。文獻[10]為解決主動懸架執行機構的輸入延遲問題,設計了一種非脆弱H∞/L2-L∞靜態輸出反饋控制器。文獻[11]采用具有2個作動器的1/4模型,并在動力學建模過程中將人體確定振動考慮在內,應用非脆弱H∞控制策略獲得較好的乘坐舒適性。
1 主動懸架動力學模型
主動懸架2自由度1/4車體懸架模型如圖1所示。其中:剛性彈簧與阻尼器為懸架被動部分,作動器為懸架的主動部分,一般由液壓伺服機構提供主動力u;ms為車身質量(簧載質量);mu為車輪質量(非簧載質量);ks為懸架彈簧剛度;cs為阻尼器阻尼系數;ku為輪胎剛度;xs、xu、xo分別表示車身垂直位移、輪胎垂直位移以及路面垂直位移。1/4車模型的理想動態微分方程為:
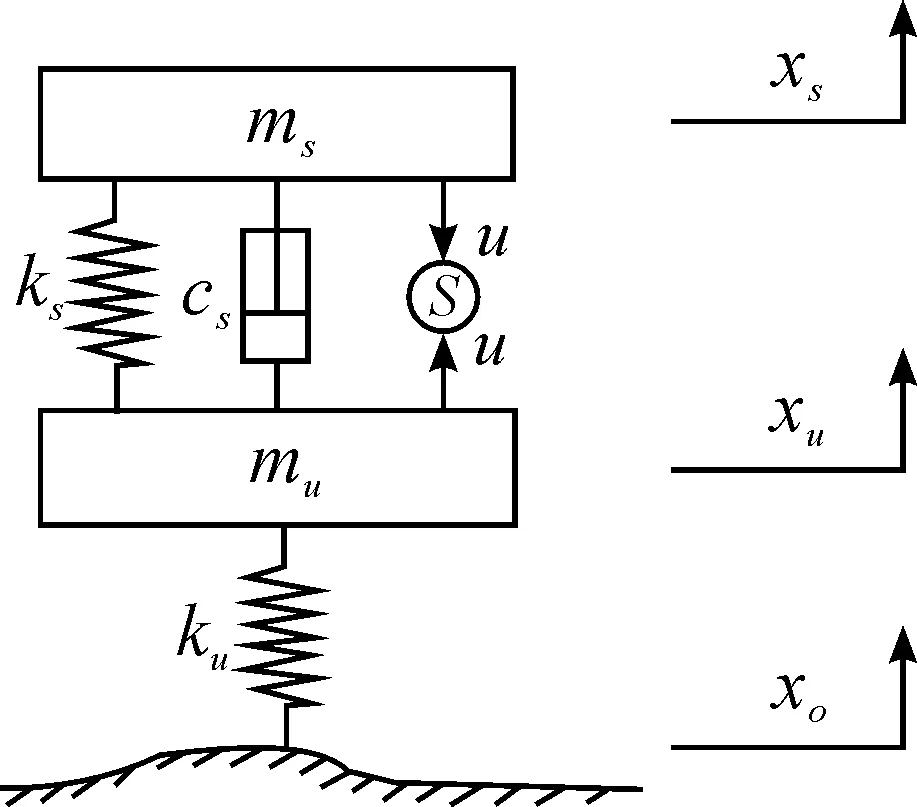
圖1 1/4車體懸架模型

現將動力學模型轉換成空間矩陣形式:

z(t)=C2x(t)+Du(t)
2 非脆弱H∞控制器設計
2.1 不確定系統的描述
過去30年間,H∞控制理論的應用取得了令人矚目的成果,存在有界參數不確定性時能保證系統穩定,即具有較強的魯棒性。文獻[7]提出:控制器在作動的過程中,H∞魯棒控制器參數也會有一定的變化,導致控制器本身出現增益擾動,這種擾動很容易導致閉環系統穩定性被破壞及性能的下降。對參數的微小改變具有高敏感性的控制器稱為脆弱控制器。為使控制器具有非脆性,不僅僅要考慮系統的參數不確定性,還需考慮控制器的參數攝動。考慮如下形式的不確定系統:
(1)
其中:x(t)∈Rn表示系統狀態;y(t)∈Rp表示系統的測量輸出;z(t)∈Rq表示系統的控制輸出;w(t)表示外界干擾;A、B1、B2、By、C1、C2、D表示維數適當的已知實常數矩陣;ΔA是未知實矩陣,反映系統的參數不確定性。將未知實矩陣的已知成分分離出來[12-14],可得到如下形式:
ΔA(t)=M1F1(t)N1
(2)
式(2)中:M1和N1是維數適當的已知矩陣;F1(t)是未知矩陣,且滿足
F1(t)TF1(t)≤I, ?t
本文旨在設計一種狀態反饋非脆弱H∞控制器,具體表達式如下:
u(t)=(K+ΔK)x(t)
(3)
式中ΔK表示控制器的增益攝動。常用的ΔK構造方式有2種:加法攝動和乘法攝動,具體表達形式如下:
1) 加法攝動
ΔK=MF(t)N,F(t)TF(t)≤I
2) 乘法攝動
ΔK=MF(t)NK,F(t)TF(t)≤I
式中:M和N表示維數適當的已知矩陣;F(t)表示未知矩陣。本文選擇加法攝動方式構造控制器增益攝動,即:
ΔK=M2F2(t)N2,F2(t)TF2(t)≤I
(4)
2.2 狀態反饋非脆弱H∞控制器設計
為推導出狀態反饋非脆弱H∞控制器的矩陣不等式,在這里介紹2條引理。
引理1 如果給定的Y、M和N是維數適當的實數矩陣,且滿足:
Y+MF(t)N+NTF(t)TMT<0
對F(t)滿足F(t)TF(t)≤I,那么對任意ε>0,有
Y+εMMT+ε-1NTN<0
引理2 如果Q(x)=Q(x)T,R(x)=R(x)T和S(x)是x的映射,對于LMI,
則上式LMI等效于
R(x)>0,Q(x)-S(x)R(x)-1S(x)T>0
其中R(x)表示常數。舒爾補定理把非線性不等式轉化成一個線性矩陣不等式。
將本文構造的非脆弱H∞控制器代入系統狀態方程中得到:

z(t)=[C2+D(K+ΔK)]x(t)
(5)
為使狀態反饋非脆弱H∞控制器對不確定性ΔA(t)和ΔK能保持穩定,需要滿足Hamiltonian方程[15]:

γ2wT(t)w(t)<0
(6)
其中V(x,t)表示Lyapunov函數,表達形式如下:
V(x,t)=x(t)TPx(t)
兩邊求導形式如下:
將式(5)代入得
P[(A+ΔA)+B1(K+ΔK)]}x(t)+
(7)
再將式(2)(4)和(7)代入式(6)得:

為滿足H(x,w,t)<0的約束條件且[xT(t)wT(t)]≠0,
根據引理2舒爾補定理,可以將上述矩陣不等式轉化為如下形式:
注:本文使用的*表示對角線轉置。
現應用引理1,將上述矩陣不等式轉化成如下形式:
應用引理2,將上述矩陣轉化成如下形式:
對上式左乘和右乘diag{X,I,I,I,I,I,I},其中令X=P-1,KP-1=Y并且如果存在對稱矩陣X>0,使上式轉化成如下形式:
(8)
如果式(8)有解時,所求的狀態反饋控制器為:K=YX-1,其中X∈R4×4是對稱實矩陣,Y∈R1×4。
3 仿真與分析
基于本文非脆弱H∞控制器的設計過程,在Matlab7.0環境下,對采用所設計控制器的主動懸架進行仿真。車輛的參數為:ms=250 kg;mu=30 kg;ks=1×104N/m;ku=1×105N/m;cs=1 000 N·s/m。
本文的參數不確定性和控制器攝動通過LFT(線性分式變換)轉換成MF(t)N形式,若要進行仿真,需要將分離出的已知矩陣進行參數設定。由本文研究可知:ΔA需要定義矩陣M1、N1;ΔK需要定義矩陣M2、N2。具體形式如下:
M1=[1 0 0 0]T
N1=[-αcs/msαcs/ms-αks/ms0]
α=0.2;M2=δ×[1 1 1 1]
N2=diag(1,1,1,1);δ=50
設置式(8)中參數ε1=ε2=5,γ=30。運用Matlab7.0中的LMI工具箱進行控制器的求解,函數lmivar,lmiterm描述矩陣不等式,函數feasp進行求解。最后求得矩陣X、Y,再根據狀態反饋控制器K=YX-1,求得控制器如下:
K=105×[-0.118 6 0.033 9 -0.572 1 1.313 8]
在Matlab7.0的環境下,對采用非脆弱控制器的主動懸架進行仿真,并與被動懸架進行對比,通過Bode函數繪制懸架加速度、懸架動擾度以及輪胎變形量的幅頻特性曲線,如圖2~4所示。根據ISO2631標準,人體對垂直振動最敏感的頻率范圍為4~8 Hz。由圖2可知:采用非脆弱H∞控制器的主動懸架性能在頻率范圍4~8 Hz內明顯優于被動懸架,使乘車舒適性得到明顯改善,而頻率超過 10 Hz后主動懸架性能惡化明顯。由圖3可知:在頻率小于1 Hz的情況下,采用非脆弱H∞控制器的主動懸架動擾度略有惡化,其他范圍內性能略優于被動懸架。由圖4可知:主動懸架的輪胎變形量在低頻段處實現了部分的優化,但在高頻段處卻有一定的惡化。造成敏感范圍優化顯著、其余范圍略有惡化的原因可能是加權函數選擇不合適。選擇加權函數協調各種性能沖突并不容易,盡管有一些指導性原則,但仍需要無數次湊試。
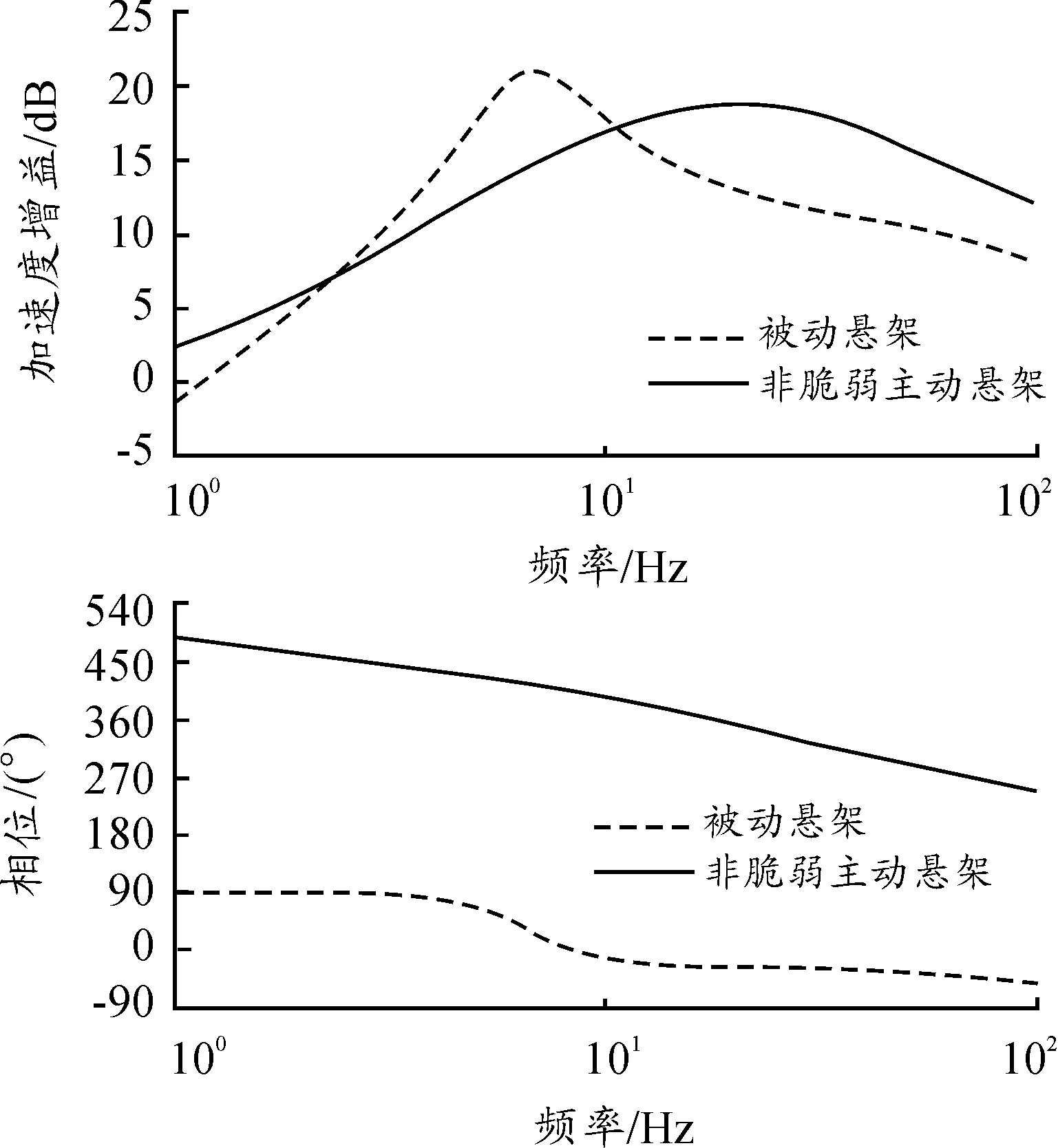
圖2 垂向加速度幅頻曲線
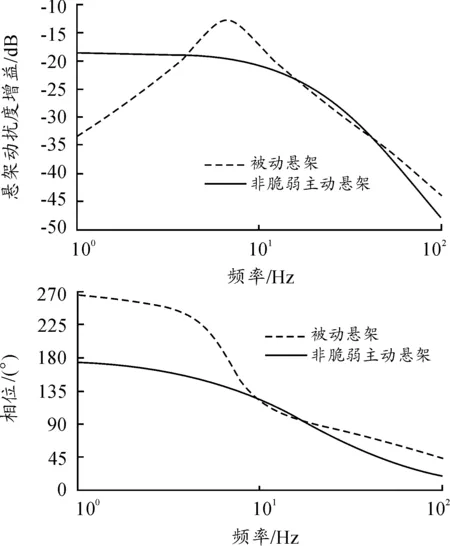
圖3 懸架動擾度幅頻曲線

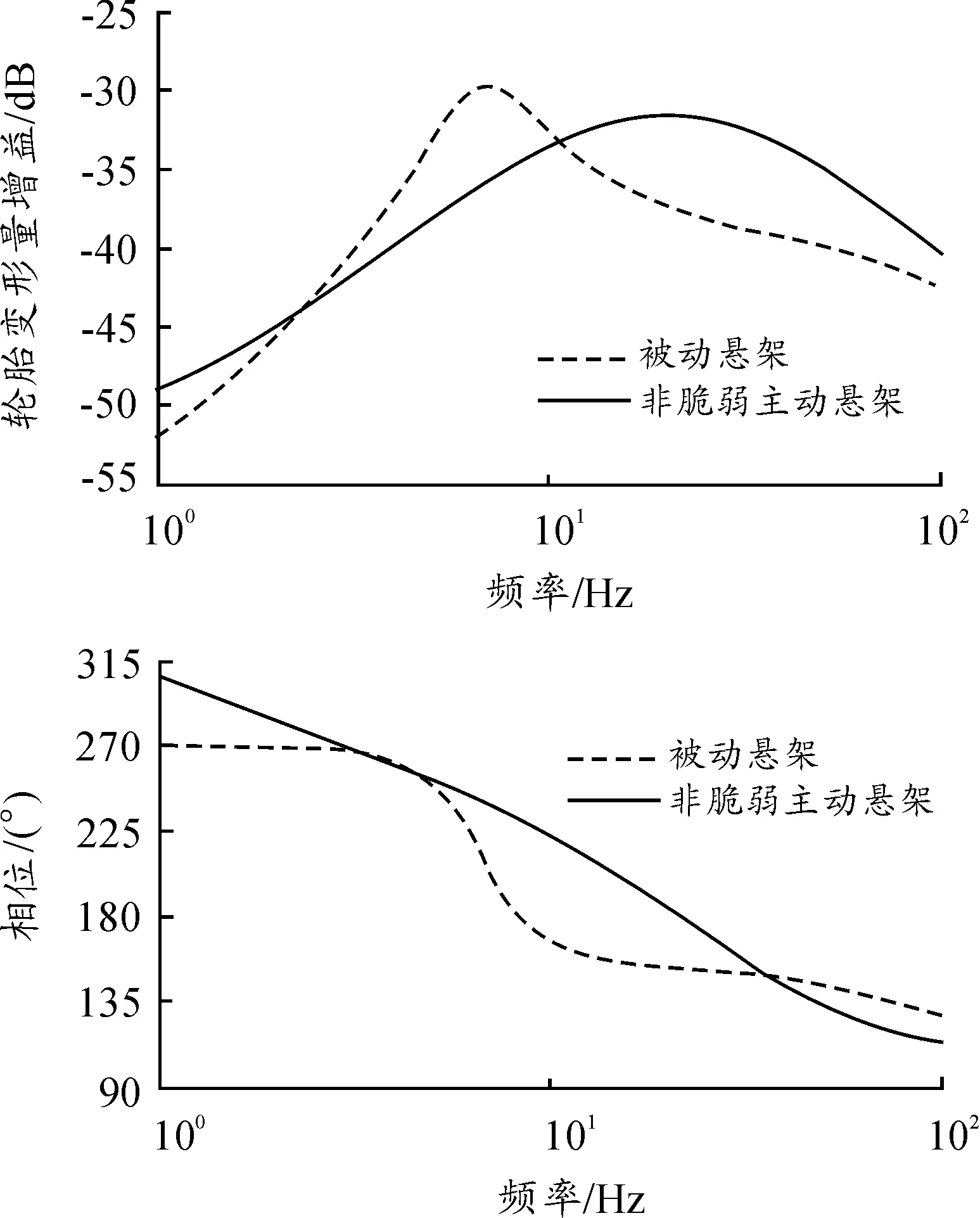
圖4 輪胎變形量幅頻曲線
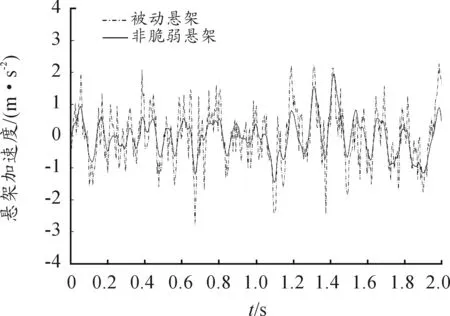
圖5 垂向加速度時域曲線
由圖5可知:主動懸架的垂直加速度比被動懸架有明顯改善,其均方根值降低了58.1%,控制效果明顯。由圖6、圖7可知:主動懸架動擾度比被動懸架明顯減小,其均方根值降低了22.5%,但輪胎的變形量并沒有明顯惡化,在提高乘車舒適性的情況下,保證了車輛操縱穩定性。總的來說,與被動懸架相比,主動懸架顯著降低了車身垂直加速度和懸架動擾度,同時又避免了輪胎動擾度增加過大。
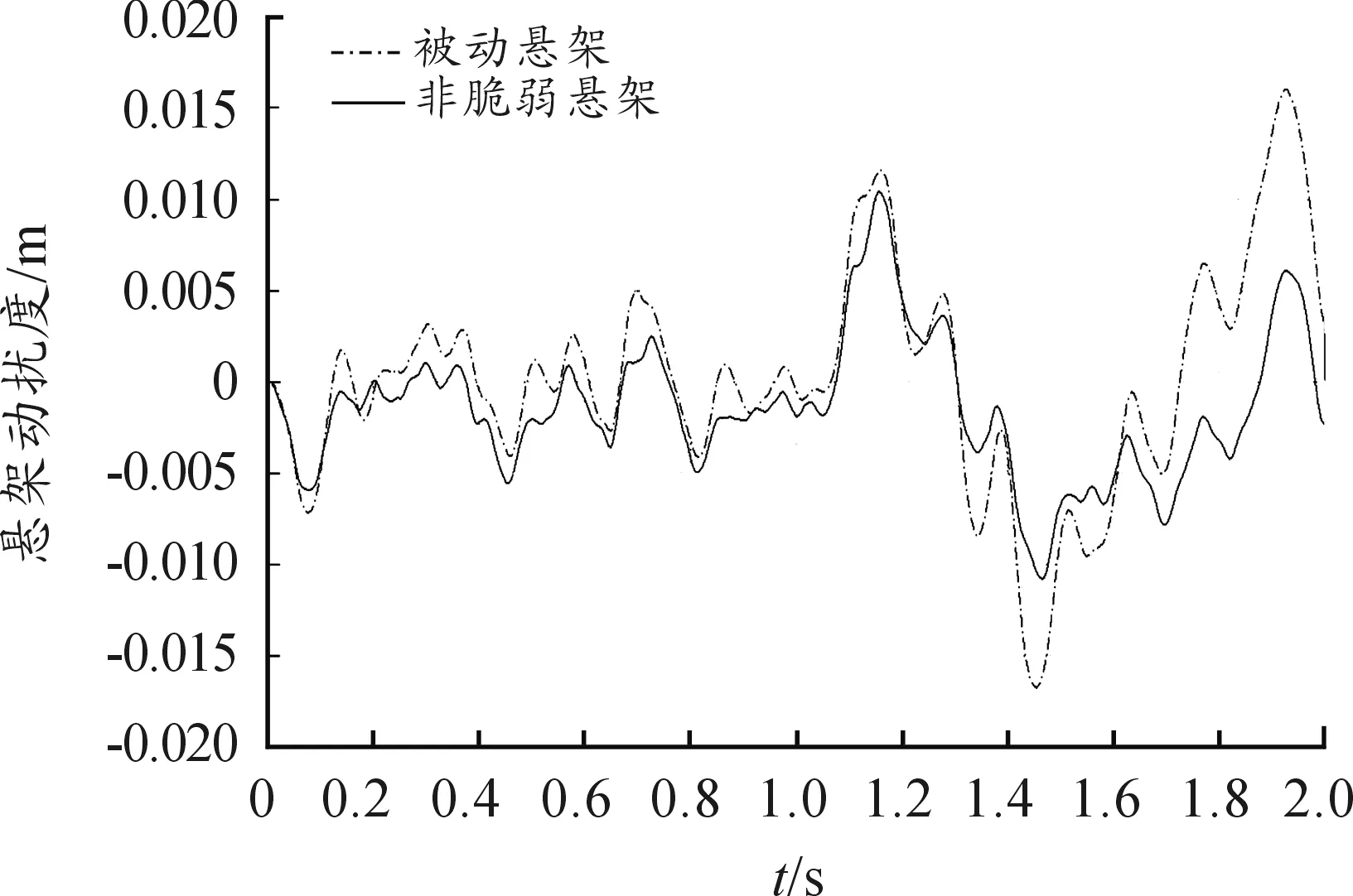
圖6 懸架動擾度時域曲線
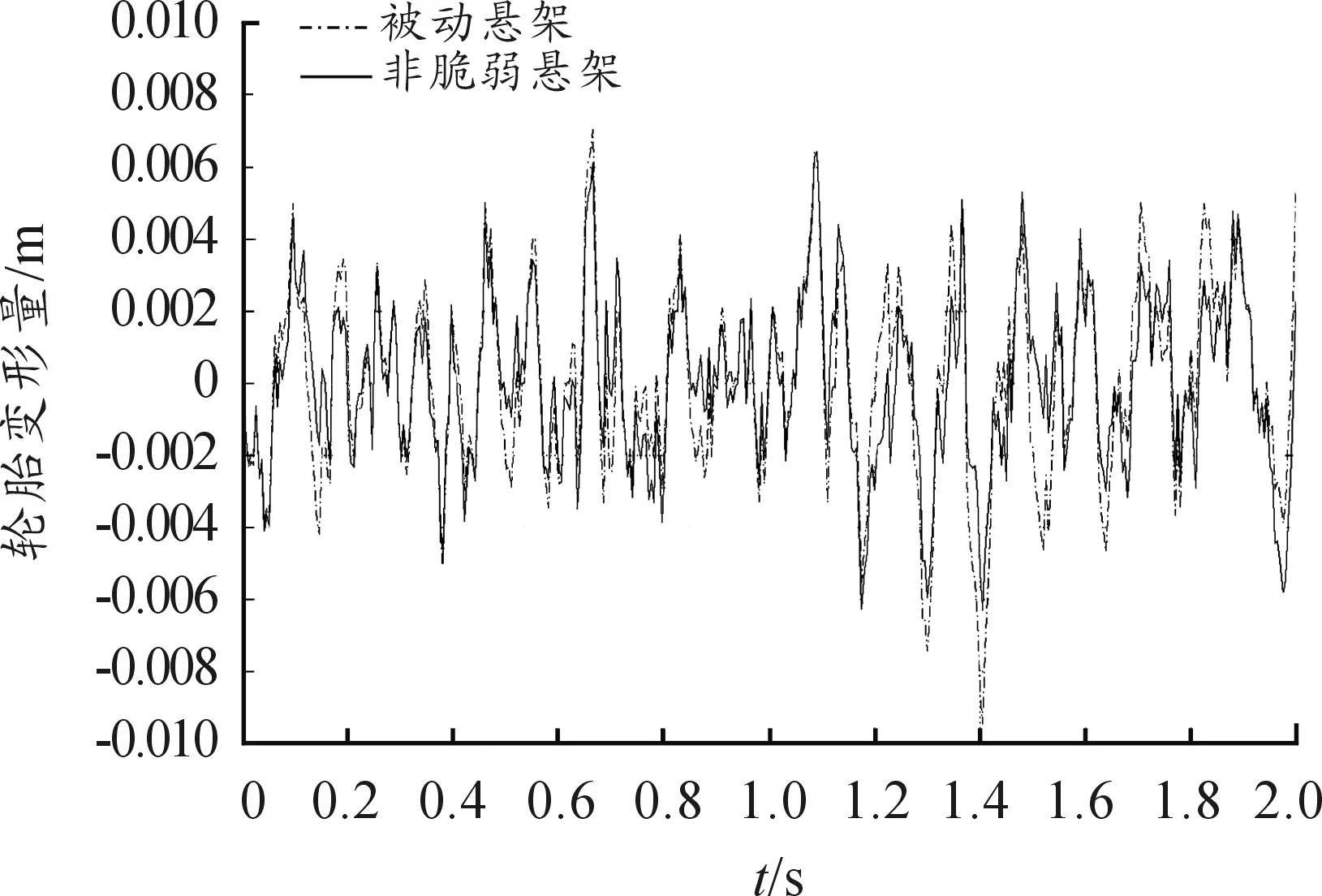
圖7 輪胎變形量時域曲線
4 結束語
以車輛主動懸架的2自由度1/4模型作為受控對象,將車輛的參數不確定性和執行器不確定性列為考慮對象,設計非脆弱H∞控制器,并通過線性矩陣不等式進行求解。仿真結果證明設計的控制器是有效的,能獲得比被動懸架更優異的乘車舒適性,同時車輛的操縱穩定性也得到一定保證。
[1] 于樹友,陳虹.基于滾動優化的H∞/廣義H2主動懸架控制[J].吉林大學學報(工學版),2007,37(5):1164-1169.
[2] YAMASHITA M,FUJIMORI K,HAYAKAWA K,et al.Application ofH∞,control to active suspension systems[J].Automatica,1994,30(11):1717-1729.
[3] 宋剛,林家浩,吳志剛.考慮參數不確定性的主動懸架魯棒H2/H∞混合控制[J].動力學與控制學報,2008,6(2):156-164.
[4] 李以農,鄭玲,羅銘剛,等.汽車主動懸架H2/H∞多目標控制線性矩陣不等式方法[J].重慶大學學報,2010,33(4):1-8.
[5] 張國光,張勇超,喻凡.車輛電動懸架的混合不確定建模與μ綜合控制器設計[J].汽車工程,2012,34(12):1100-1106.
[6] 劉樹博,趙丁選,尚濤.主動懸架非脆弱H2/廣義H2靜態輸出反饋最優控制[J].四川大學學報(工程科學版),2011,43(1):240-246.
[7] KEEL L H,BHATTACHARYYA S P.Robust,fragile or optimal?[J].Automatic Control IEEE Transactions on,1997,42(8):1098-1105.
[8] DORATO P.Non-fragile controller design:an overview[C]//American Control Conference.USA:[s.n.],1998:2829-2831.
[9] LI H,LIU H,HAND S,et al.Non-fragileH∞control for half-vehicle active suspension systems with actuator uncertainties[J].Journal of Vibration & Control,2013,19(19):560-575.
[10] KONG Y,ZHAO D,YANG B,et al.Non-fragile multi-objective static output feedback control of vehicle active suspension with time-delay[J].Vehicle System Dyna-mics,2014,52(7):948-968.
[11] GUDARZI M,OVEISI A.Ride comfort performance of active vehicle suspension with seat actuator based on non-fragileH∞controller[J].International Review on Modelling and Simulations, 2015,8(1):90-98.
[12] 周云山,于秀敏.汽車電控系統理論與設計[M].北京:北京理工大學出版社,1999.
[13] TSAI M C,GU D W.Robust and optimal control[C]// Prentice-Hall,Inc.1997:2095.
[14] 梅生偉.現代魯棒控制理論與應用[M].北京:清華大學出版社,2008.
[15] DU H,KAM J L,SZE Y.Design of non-fragileHcontroller for active vehicle suspensions[J].Journal of Vibration & Control,2005,11(2):225-243.
DesignofNon-FragileH∞ControllerforActiveSuspension
MA Ke, MI Lin, TAN Wei, WANG Sulei
(Vehicle Engineering Institute, Chongqing University of Technology, Chongqing 400054, China)
It presents an approach to design the non-fragileH∞controller for active suspension system with parameter uncertainty and actuator uncertainty constraints, and a quarter-car model with active suspension system is considered. By using this controller, the sprung mass acceleration, suspension deflection and tire deflection are optimized. The non-fragileH∞controller can be obtained by solving a linear matrix inequality, and the simulation model can be built to analyze in Matlab7.0/Simulink. The results from the simulation demonstrate that the controller obtains a good performance of ride comfortable with less expense of handing stability.
active suspension; non-fragileH∞controller; linear matrix inequality
2017-09-22
重慶市科委科技支撐示范項目(cstc2014fazktjcsf6004);重慶理工大學科研啟動基金資助項目(2015ZD06)
馬克(1991—),男,碩士研究生,主要從事汽車零部件研究,E-mail:1586751087@qq.com。
馬克,米林,譚偉,等.主動懸架非脆弱H∞控制器設計[J].重慶理工大學學報(自然科學),2017(12):15-21.
formatMA Ke, MI Lin, TAN Wei, et al.Design of Non-FragileH∞Controller for Active Suspension[J].Journal of Chongqing University of Technology(Natural Science),2017(12):15-21.
10.3969/j.issn.1674-8425(z).2017.12.003
U461.4
A
1674-8425(2017)12-0015-07
(責任編輯劉 舸)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03