基于EDEM的雙螺旋奶牛飼喂裝置給料性能分析與試驗
2018-01-09 01:00:42戚江濤蒙賀偉李成松李亞萍
農業工程學報 2017年24期
戚江濤,蒙賀偉,坎 雜,李成松,李亞萍
?
基于EDEM的雙螺旋奶牛飼喂裝置給料性能分析與試驗
戚江濤,蒙賀偉※,坎 雜,李成松,李亞萍
(石河子大學機械電氣工程學院,石河子 832000)
奶牛精確飼喂技術的實施不僅能夠促進奶牛業健康發展,而且還能夠提高牛場經濟效益。基于牛場現狀,該文在設計的等徑雙螺旋精確給料的奶牛飼喂裝置基礎上,理論分析了物料輸送速度與給料時間,通過Solidworks對雙螺旋給料裝置進行了三維建模,并利用EDEM軟件分別對40 mm攪龍和70 mm攪龍不同轉速(80、100及120 r/min)的給料過程進行了離散元仿真,分析了裝置給料穩定性,結果表明,40 mm攪龍在轉速為120 r/min時變異系數為0.052 2,70 mm攪龍在轉速為100 r/min時變異系數為0.105 2,給料穩定性最優。為進一步驗證仿真結果,在搭建的雙螺旋給料飼喂裝置上,對40 mm攪龍和70 mm攪龍進行了給料試驗,試驗結果顯示,40 mm螺距攪龍轉速120 r/min和70 mm攪龍轉速100 r/min時給料穩定性最優,試驗結果與仿真結果吻合。在驗證裝置給料穩定性基礎上,對給料精度進行了試驗,結果顯示:40 mm攪龍和70 mm攪龍在80、100、120 r/min等不同工作轉速組合下,給料精度均大于95%,當40 mm攪龍轉速為120 r/min,70 mm攪龍轉速為100 r/min時,給料時間為14.1 s,給料量為6.009 kg,裝置給料精度不低于99.835%,符合奶牛精確飼喂效率與精度要求。
控制系統;模型;試驗;奶牛;雙螺旋;飼喂裝置;給料速度;穩定性
0 引 言
在牛場現代化管理中,精細飼養是規模化、現代化牛場提升養殖效益的關鍵[1]。奶牛精細飼養不僅是畜牧福利養殖的重要體現,而且還是促進奶牛健康生長、提高奶牛生產性能的重要保障,為此,熊本海等[2-6]將電氣控制技術、無線通信及信息處理技術等相結合,開展了奶牛個體身份識別、信息采集、處理及飼料精確配比等相關精細飼喂技術研究,為奶牛智能化、科學化飼養提供了一定的技術基礎。
在奶牛精細飼養技術實施過程中,給料裝置是技術實施關鍵,其工作性能主要體現在給料穩定性及給料精度2個方面。目前奶牛精細給料采用的螺旋攪龍輸料具有結構簡單、應用范圍廣等特點[7-8],對其研究主要集中在螺旋給料器結構和運動參數優化等方面,開展此類研究的有國外如西德學者Hans Gable,以顆粒群為對象研究了垂直輸送機小角度傾斜對物料輸送形態的影響[9];Fernandez等[10]利用離散元法研究了不同類型螺旋鉸刀對總質量流量、物料沉降模式、功耗的影響;Moysey等[11]基于DEM分析單螺旋擠出機的顆粒在螺桿上橫向和縱向速度分布;國內烏蘭圖雅等[12-16]研究了螺距、螺旋軸轉速等參數對秸稈、果穗、飼草等物料輸送性能的影響;祝佳利等[17-21]利用離散元仿真軟件對垂直螺旋攪龍、水平螺旋攪龍等螺旋給料過程進行了模擬仿真,并對螺旋給料結構參數和運動參數等進行了優化。本文在以上研究基礎上,對設計的等徑雙螺旋精確給料奶牛飼喂裝置物料輸送速度與給料時間進行分析,通過Solidworks對裝置進行三維建模,利用EDEM軟件對螺旋輸送過程進行離散元仿真,分析裝置的給料穩定性,最后,通過搭建的雙螺旋精確給料裝置對仿真結果進行試驗驗證。
1 雙螺旋給料裝置結構及工作原理
1.1 結構組成
該裝置主要由機架、料倉、驅動電機、輸料管、雙螺旋給料裝置及控制系統等組成,如圖1所示。
雙螺旋給料裝置主要結構參數如表1所示。
1.2 工作原理
裝置工作過程中,依據奶牛個體需求確立給料量,并通過控制雙螺旋給料裝置給料時間完成奶牛個體所需飼喂物料的精確供給,為保證給料效果,給料裝置必須同時滿足給料速度與給料精度的要求。雙螺旋給料裝置分別由驅動電機帶動,螺旋給料器葉片在旋轉運動過程中對物料進行推撥,物料在沿著螺旋葉片圓周方向運動的同時沿軸向方向移動。對目標給料量給料時,首先啟動兩者同時進行物料供給,當完成80%目標給料量供給時,停止大螺距(70 mm)給料螺旋攪龍,小螺距(40 mm)給料螺旋攪龍繼續給料,直至完成目標給料量供給。
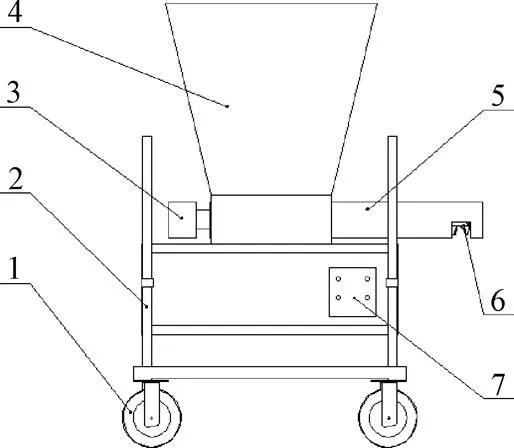
1.輪子 2.機架 3.驅動電機 4.料倉 5.輸料管 6.雙螺旋給料裝置 7.控制系統
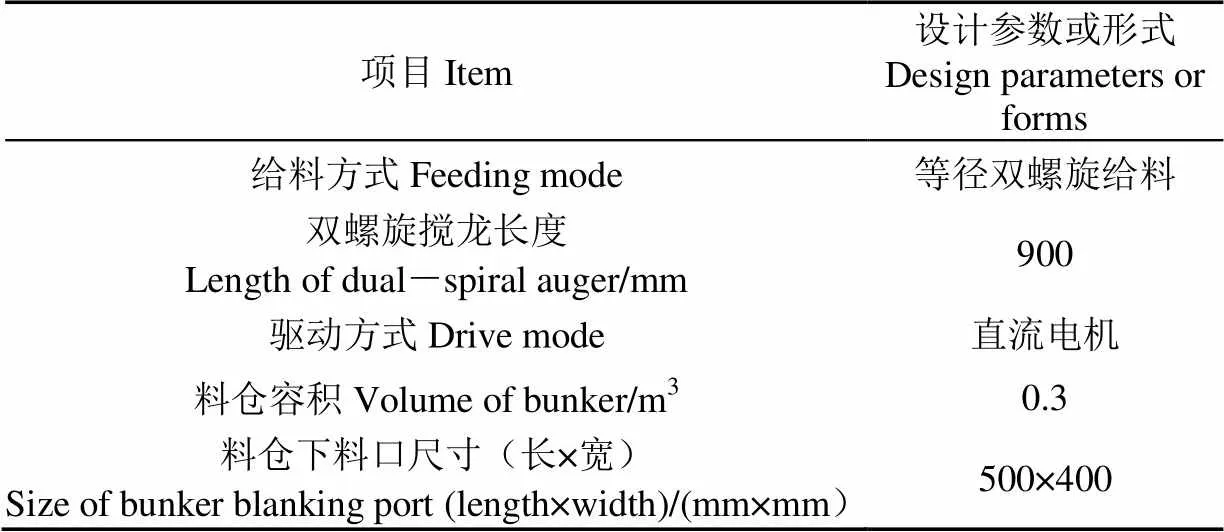
表1 雙螺旋給料裝置主要結構參數
2 雙螺旋給料性能分析
2.1 雙螺旋給料裝置參數確定
針對奶牛精確飼喂技術要求,為保證裝置給料效率的同時滿足給料精度要求,本文采用粗給料和精給料相結合的給料方式,其中粗給料采用雙螺旋攪龍同時給料方式,給料流量較大,用于提高裝置給料效率;精給料采用小螺距螺旋攪龍給料,給料流量小,用于提高給料精度。在前期研究基礎上,本文給料裝置主要由螺旋葉片、螺旋軸和輸料管等組成,螺旋葉片采用實體式形狀,按照等螺距(40和70 mm)排列方式焊接在螺旋軸上(圖2),螺旋軸材料選擇45#鋼,軸徑40 mm,螺旋軸由步進電機驅動,從而帶動螺旋葉片轉動,完成物料的推移輸送。輸料管材料選擇無縫鋼管,兩端分別設有進料口和出料口,為保證螺旋攪龍輸送質量,輸料管選用直徑108 mm、厚2 mm、內壁光滑的無縫鋼管,內徑與螺旋葉片外徑間隙設計為7 mm。
輸送物料奶牛精飼料的填充系數、特性系數、綜合系數等參數查表可得[24],松散密度=0.7 t/m3,填充系數=0.4,特性系數=0.041 5。牛場調研確定高產奶牛單產飼喂所需最大精飼料量為6 kg[25],每頭牛最大給料時間為15 s,可得裝置給料速度為0.4 kg/s,即螺旋給料裝置的輸送能力1.44 t/h。根據螺旋輸送裝置為水平放置,確定傾角=0,傾角系數=1,螺旋葉片直徑按式(1)計算。
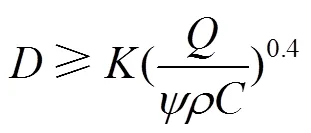
式中為輸送能力,t/h;為物料特性系數;為填充系數;為傾角系數。
1.驅動電機 2.料倉 3.輸料管 4. 40 mm攪龍 5. 70 mm攪龍
1.Drive motor 2.Bunker 3.Conveying pipe 4. 40 mm auger 5. 70 mm auger
圖2 雙螺旋給料裝置示意圖
Fig.2 Structure diagram of dual-spiral feeding device
計算可得:≥79.5(mm)
為保證裝置給料效率,確保裝置輸送能力具備較大余量,因此,本研究在計算螺旋葉片直徑的基礎上,將螺旋葉片的直徑加大并確定為90 mm。
2.2 物料輸送速度分析
螺旋攪龍工作過程中,物料在螺旋葉片的推撥作用下,沿著螺旋葉片圓周方向向上運動,當到達一定位置時向下塌落,同時沿軸向方向流動[22-23]。在該運動過程中影響物料顆粒的運動軌跡變化的因素除顆粒本身特性之外,還包括受力情況、速度分布情況等,為研究裝置給料穩定性,對任一物料顆粒速度分布情況進行了分析,如圖3所示。
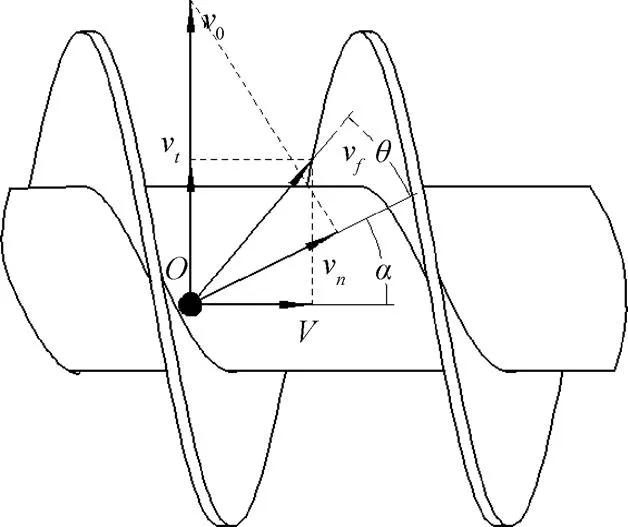
注:O為顆粒位置;vo為牽連速度,vn為忽略摩擦力情況下的絕對速度,vf為在考慮摩擦力情況下的絕對速度,v為vf分解后軸向速度,vt為vf分解后切向速度,m×s-1;α為vn與v之間夾角,θ為vf與vn之間夾角,(°)。
在任一半徑處選取一個顆粒,其運動方式主要有2種,即與螺旋面發生的相對滑動和沿著螺旋軸輸送方向的水平運動。其中顆粒的圓周速度(牽連速度)為v=,方向為顆粒運動切線方向;在忽略摩擦力情況下的絕對速度v=vsin;在考慮摩擦力情況下的絕對速度v=v/cos,對v進行分解得到軸向速度和切向速度v。軸向速度使物料顆粒沿著螺旋軸輸送方向運動,切向速度則使物料顆粒在螺旋攪龍中攪拌、翻動等。根據速度分析,物料顆粒軸向運動速度為

為分析螺旋輸送過程中顆粒速度分布及運動情況,利用EDEM軟件對螺旋攪龍中物料運動過程進行仿真,并提取顆粒的運動軌跡如圖4所示,圖中軌跡線不同顏色代表不同速度值大小,分析軌跡線可知顆粒在落入螺旋給料器工作區域范圍內時,顆粒與運動顆粒群之間產生作用力,出現反彈現象,當隨顆粒群一起運動時,顆粒沿著螺旋軸切線方向運動的同時沿著軸向方向移動,從而完成物料的運移。
由以上分析可知,當物料顆粒輸送方向運動速度>0時,物料顆粒可以沿著輸送方向運動;反之則不能。根據個體奶牛飼喂過程需在最短的時間內完成物料投放作業并且保證作業質量要求,螺旋攪龍轉速設置為80、100及120 r/min,相應可計算出輸送方向速度范圍為0.72~1.08 m/s,速度值均大于0,達到了物料顆粒運動條件。
2.3 雙螺旋給料時間確定
本文設計的雙螺旋精確給料裝置主要由大螺距(70 mm)螺旋攪龍和小螺距(40 mm)螺旋攪龍組成。為保證裝置給料效率和精度,采用“先快后慢,先粗后精”的給料方式,在初步試驗不同螺距攪龍不同轉速給料速度的基礎上,分析了不同粗精給料比例下的給料時間,按照最大給料量給料時間不高于15 s的要求,初步確定了裝置給料實施方案。實施過程中,通過對給料技術方案給料時間和給料精度進行試驗,分析其是否符合精細飼喂給料時間不高于15 s、給料精度不低于95%的技術要求,最終確定具體實施方案為:在針對目標給料量給料過程中,首先啟動兩者同時進行物料供給,當完成80%目標給料量供給時,停止大螺距(70 mm)給料螺旋攪龍,小螺距(40 mm)給料螺旋攪龍繼續給料,直至完成目標給料量供給,該過程關系表達式如式(3)。

式中為目標給料量,kg;1為80%目標給料量,kg;2為20%目標給料量,kg;1為大螺距攪龍給料流量,kg/s;2為小螺距攪龍給料流量,kg/s;1為大小螺距攪龍共同運行時間,s;2為小螺距攪龍單獨運行時間,s;為總運行時間,s。
為進一步分析裝置是否滿足給料精度與給料效率的要求,以確定裝置最優工作參數,由式(3)可得出雙螺旋攪龍完成目標給料量80%的時間1和小螺距攪龍完成目標給料量20%的時間2,從而可計算出給料總時間,即=1+2,根據個體奶牛飼喂要求可得≤15 s。
3 螺旋給料過程仿真與分析
3.1 物理模型建立
螺旋給料裝置主要由料倉、輸料管、螺旋攪龍等組成,利用Solidworks軟件對其進行三維建模,另存為igs格式后導入EDEM軟件幾何體模塊中,仿真重力加速度為9.81 m/s2。在參數設定過程中,在測定物料密度為700 kg/m3基礎上,其他參數參考文獻[26-29]確定如下:剪切模量2.3×107Pa、泊松比0.3,螺旋攪龍特性參數設置為密度7 850 kg/m3、剪切模量7×1010Pa、泊松比0.3。根據輸送物料為顆粒狀且顆粒之間和顆粒與幾何體之間無粘貼現象,接觸模型選用Hertz-Mindlin無滑動接觸模型,接觸參數設置參考文獻[26-29],物料顆粒與物料顆粒之間接觸參數設置為恢復系數0.1、動摩擦因數0.7、靜摩擦因數0.01,物料顆粒與螺旋攪龍之間接觸參數設置為恢復系數0.3、動摩擦因數0.5、靜摩擦因數0.01。
3.2 仿真參數設定
在料倉正上方設置顆粒生成平面,屬性虛擬,生成物料顆粒半徑為2 mm,在前期仿真基礎上,為保證仿真過程螺旋攪龍物料輸送過程連續穩定,設置顆粒總數為60 000個,生成位置隨機,為加快顆粒生成速度,在顆粒下落方向設置顆粒速度為2 m/s。當顆粒全部生成之后,螺旋攪龍開始旋轉輸送物料,攪龍轉速分別設置為80、100及120 r/min,瑞利時間步長設置為25%[30],顆粒生成和排出過程總仿真時間為20 s。
3.3 評價指標
給料穩定性利用給料速度變異系數來進行描述,對各組不同目標給料量和測得的實際下料量進行比較得出變異程度。給料速度變異系數越小說明該水平組合下數據的變異程度就越小,螺旋攪龍的給料穩定性越好。根據公式(6)計算變異系數。

式中為樣本的標準差;為樣本的均值。
給料精度指標利用相對誤差進行描述,通過對比實際給料質量和目標給料質量之間的差異得出相對誤差。當確定實際給料質量和目標給料質量2個值后利用公式(7)對相對誤差進行計算,相對誤差越小,表明裝置的給料精度越高,反之給料精度越低。

式中為相對誤差,%;為實際給料質量,kg;0為目標給料質量,kg。
3.4 仿真結果分析
顆粒總質量在仿真總時間內先逐漸增加(顆粒生成階段),當達到某一穩定值時開始逐漸減少(顆粒排出階段)。在仿真完成后,在仿真分析界面導出顆粒總質量隨時間變化表,選取顆粒排出時間段中8個時間點(0.5~4 s,間隔為0.5 s),通過查找每個時間點及其上一時間點的顆粒質量數值計算出每個時間點的排出顆粒質量,相應得出顆粒排出速度,即給料速度。仿真主要對螺旋攪龍在輸送物料過程中給料速度的穩定性進行研究。仿真40 mm攪龍、70 mm攪龍的給料情況如表2所示。
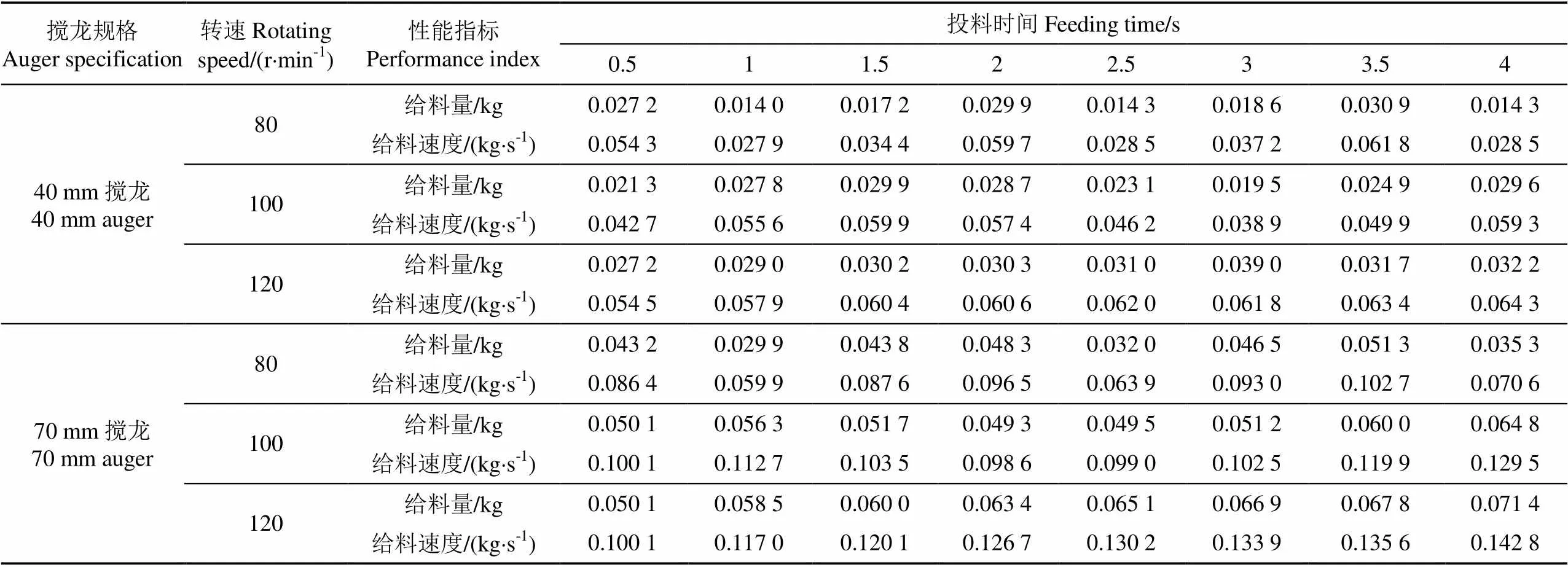
表2 40、70 mm攪龍不同轉速、給料時間下的給料量及給料速度
由表2可得不同攪龍轉速下40、70 mm攪龍的給料速度均值及變異系數,具體結果如表3所示。
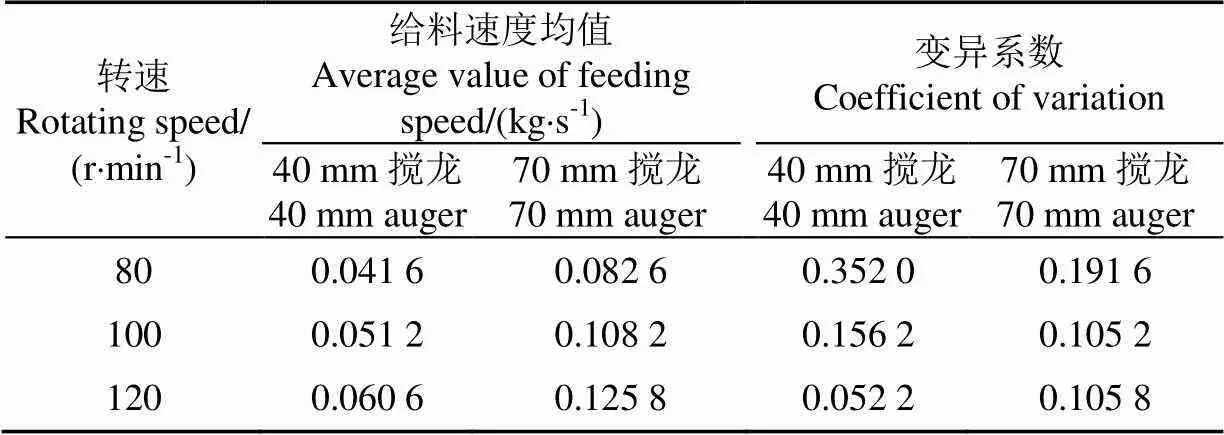
表3 給料速度均值及變異系數表
通過表3可得,螺距為40 mm攪龍在轉速為80、100、120 r/min時,給料速度范圍為0.041 6~0.060 6 kg/s,螺距為70 mm攪龍在轉速為80、100、120 r/min時,給料速度范圍為0.082 6~0.125 8 kg/s,其中40 mm攪龍轉速為120 r/min時變異系數為0.052 2,70 mm攪龍轉速為100 r/min時變異系數為0.105 2,根據數據統計分析變異系數大于15%時數據就不正常,得出該裝置給料穩定性較好,符合給料要求。
4 試驗驗證
4.1 試驗儀器與材料
儀器:天平(精度為0.002 kg)、秒表。
試驗材料:西部牧業新疆泉牲牧業有限責任公司生產的561-H型泌乳期奶牛精飼料
4.2 給料穩定性試驗
試驗因素為攪龍螺距、轉速,其中螺距水平值為40和70 mm,轉速水平值為80、100、120 r/min。通過試驗,測得螺距40和70 mm攪龍組合在各轉速下5、8和10 s時的給料速度,重復試驗10次,測得給料量并計算出給料速度均值及變異系數,如表4所示。
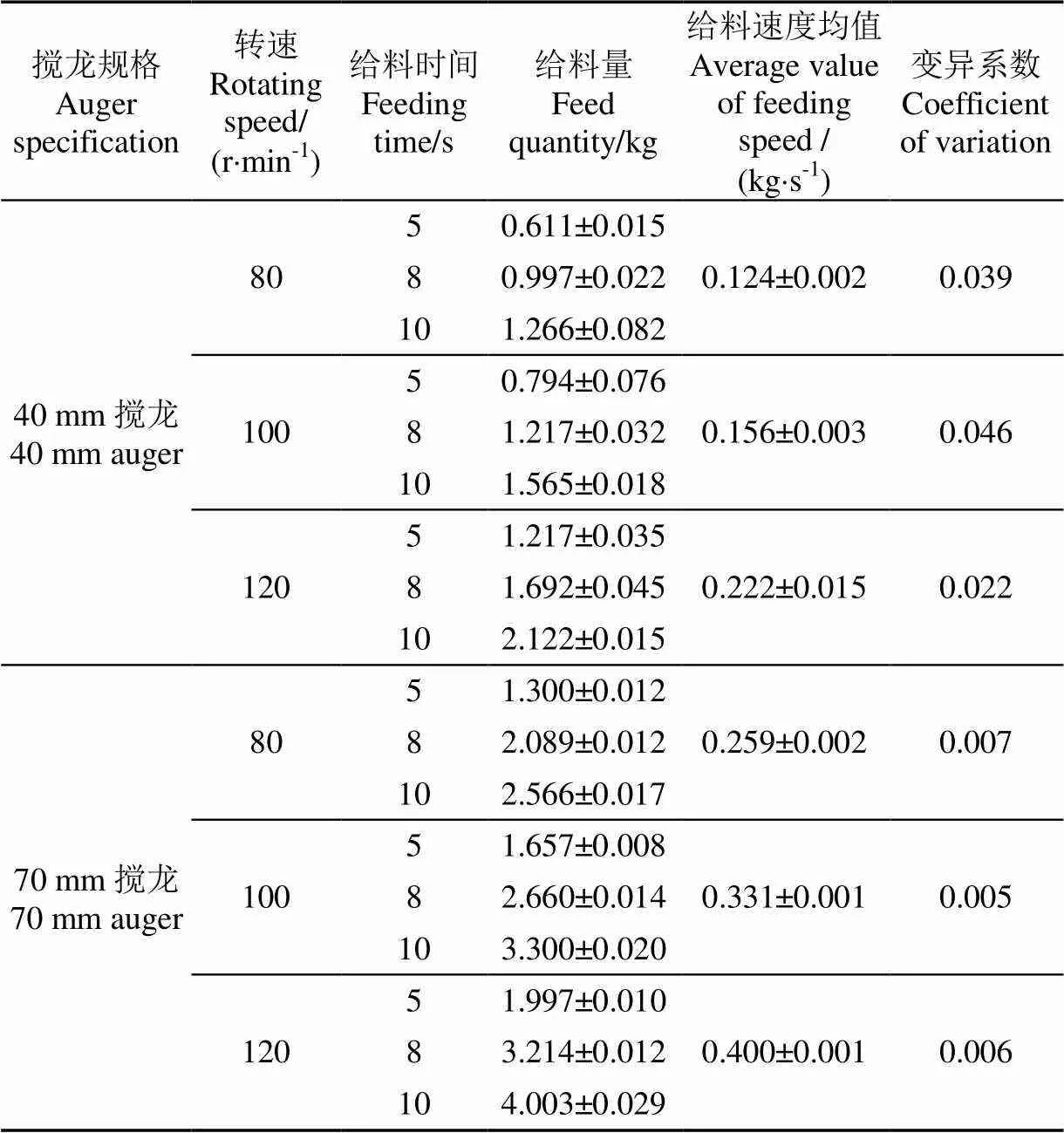
表4 40、70 mm攪龍不同轉速、給料時間下的給料量、給料速度均值及變異系數
通過表4可得,40 mm螺距攪龍在轉速為80、100、120 r/min時,給料速度范圍為0.124~0.222 kg/s,70 mm螺距攪龍在轉速為80、100、120 r/min時,給料速度范圍為0.259~0.400 kg/s,其中40 mm攪龍在轉速為120 r/min時變異系數為0.022,70 mm攪龍在轉速為100 r/min時變異系數為0.005,給料穩定性均較好,仿真結果與試驗結果相吻合。
4.3 給料精度試驗
試驗過程中,將精飼料給料量設置為6 kg,按照“先快后慢,先粗后精”給料方式,根據式(4)、式(5)計算各攪龍給料時間,并進一步控制各攪龍的運轉,設定各攪龍轉速并進行給料,測量實際下料量,由式(7)計算相對誤差,實際給料量及給料相對誤差如表5所示。
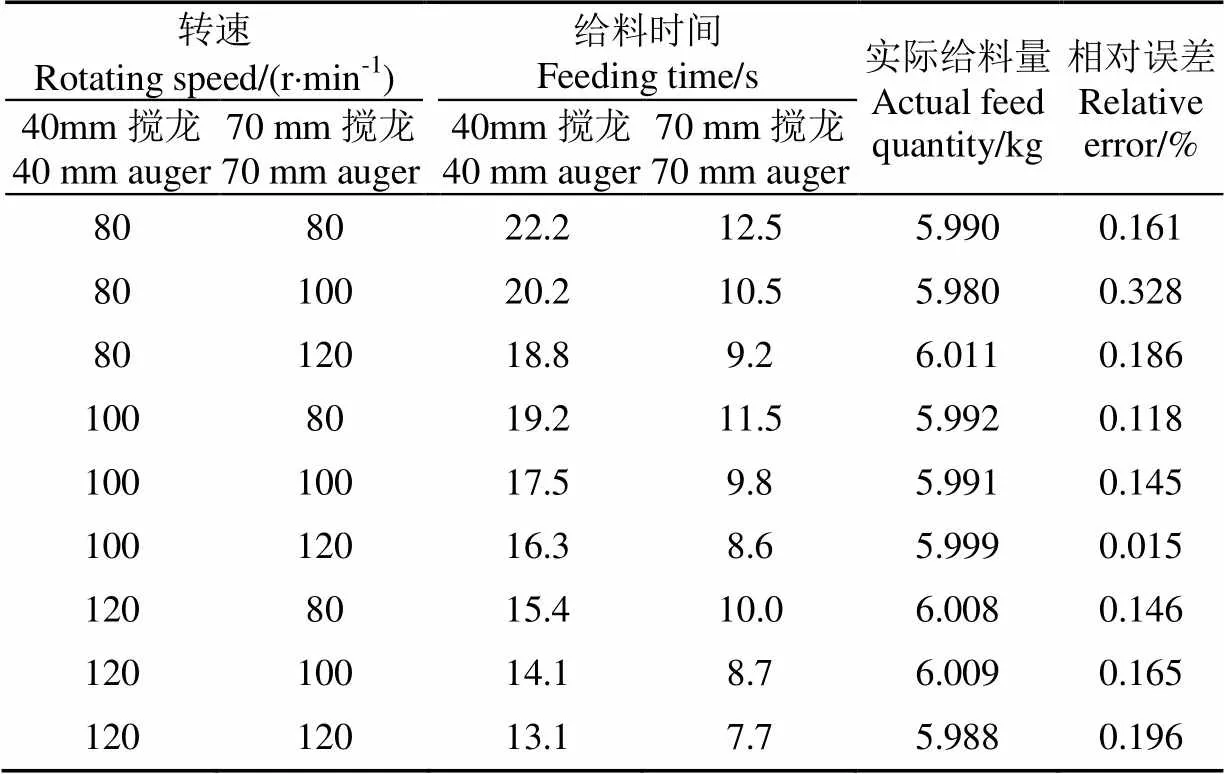
表5 40、70mm攪龍不同工作參數及其對應相對誤差
由表5可得,40 mm攪龍和70 mm攪龍在80、100、120 r/min等不同工作轉速組合下,給料精度均大于95%,根據奶牛精細養殖給料時間要求,確定40 mm攪龍轉速120 r/min、70 mm攪龍轉速100 r/min,裝置給料總時間14.1s,給料量6.009 kg,給料相對誤差0.165%,即裝置給料精度不低于99.835%,符合奶牛精確飼喂效率與精度要求。
5 結 論
根據個體奶牛精確養殖要求,在設計的等徑雙螺旋精確給料的奶牛飼喂裝置基礎上,理論分析了物料輸送速度與給料時間,并分別采用仿真試驗及驗證試驗的方法對等徑雙螺旋精確給料裝置進行了研究,并得到了以下結論:
1)通過Solidworks三維建模以及EDEM給料過程離散元仿真,確立了40、70 mm螺距攪龍最優轉速組合為120、100 r/min,并在搭建的雙螺旋給料飼喂裝置上,對40 mm攪龍和70 mm攪龍進行了給料穩定性試驗,結果顯示:40 mm螺距攪龍轉速120 r/min和70 mm攪龍轉速100 r/min時變異系數分別為0.022和0.005,給料穩定性最優,試驗結果與仿真結果吻合。
2)在對給料穩定性研究的基礎上,通過搭建的雙螺旋給料飼喂裝置對裝置進行了給料精度試驗,結果顯示:40、70 mm攪龍轉速組合為120、100 r/min時,給料時間為14.1 s,給料量6.009 kg,給料精度不低于99.835%,符合奶牛精確飼喂效率與精度要求。
[1] 于嘯. 奶牛精量飼喂控制系統的研究[D]. 長春:吉林大學,2016.
Yu Xiao. Research on Precision Feeding Control System of Dairy Cattle[D]. Changchun: Jilin University, 2016. (in Chinese with English abstract)
[2] 熊本海,蔣林樹,楊亮,等. 奶牛飼喂自動機電控制系統的設計與試驗[J]. 農業工程學報,2017,33(7):157-163.
Xiong Benhai, Jiang Linshu, Yang Liang, et al. Design and experiment of automatic electromechanical control system for dairy feeding[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(7): 157-163. (in Chinese with English abstract)
[3] 高振江,郭躍虎,蒙賀偉,等. 自走式奶牛精確飼喂機控制系統[J]. 農業機械學報,2012,43(11):226-230,236.
Gao Zhenjiang, Guo Yuehu, Meng Hewei, et al. Automatic control system of automatic feeding machine for dairy cows[J]. Transactions of The Chinese Society of Agricultural Machinery, 2012, 43(11): 226-230, 236. (in Chinese with English abstract)
[4] 范永存,張長利,董守田,等. 奶牛精量飼喂系統研究[J]. 農業機械學報,2009(S1):65-68,64.
Fan Yongcun, Zhang Changli, Dong Shoutian, et al. Study on precision feeding system for dairy cows[J]. Transactions of The Chinese Society of Agricultural Machinery, 2009(S1): 65-68, 64. (in Chinese with English abstract)
[5] 花俊國,周永亮,花俊治,等. 奶牛自動飼喂系統的研究與開發[J]. 農業工程學報,2006,22(增刊2):79-83.
Hua Junguo, Zhou Yongliang, Hua Junzhi, et al. Research and development of automatic feeding system for dairy cattle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2006, 22(Supp.2): 79-83. (in Chinese with English abstract)
[6] 楊存志,李源源,楊旭,等. FR-200型奶牛智能化精確飼喂機器人的研制[J]. 農機化研究,2014,36(2):120-122,126.
Yang Cunzhi, Li Yuanyuan, Yang Xu, et al. Development of intelligent feeding robot for FR-200 cows[J]. Journal of Agricultural Mechanization Research, 2014, 36(2): 120-122, 126. (in Chinese with English abstract)
[7] 賈朝斌,程珩. 螺旋輸送機參數化設計方法研究[J]. 機械設計與制造,2015(4):206-208,213.
Jia Chaobin, Cheng Hang. Research on parametric study method of screw conveyor[J]. Machinery Design &Manufacture, 2015(4): 206-208, 213. (in Chinese with English abstract)
[8] 高振江,李輝,蒙賀偉. 基于全混合日糧飼喂技術的精飼料精確飼喂模式[J]. 農業工程學報,2013,29(7):148-154.
Gao Zhenjiang, Li Hui, Meng Hewei. Study on concentrated precise feeding pattern based on feeding technology of TMR[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(7): 148-154. (in Chinese with English abstract)
[9] 許嵐. 變徑變螺距螺旋輸送機的理論與實驗研究及仿真[D]. 湘潭:湘潭大學,2006.
Xu Lan. Theoretical and Experimental Research and Simulation of Variable Screw Pitch Screw Conveyor[D]. Xiangtan: Xiangtan University, 2006. (in Chinese with English abstract)
[10] Fernandez J W, Cleary P W, McBride W. Effect of screw design on hopper drawdown of spherical particles in a horizontal screw feeder[J]. Chemical Engineering Science, 2011, 66(22): 5585-5601.
[11] Moysey P A, Thompson M R. Modelling the solids inflow and solids conveying of single-screw extruders using the discrete element method[J]. Powder Technology, 2005, 153(2): 95-107.
[12] 烏蘭圖雅,王春光,祁少華,等. 揉碎玉米秸稈螺旋輸送性能試驗分析[J]. 農業工程學報,2015,31(21):51-59.
Wulantuya, Wang Chunguang, Qi Shaohua, et al. Performance experiment of screw conveyor for chopped corn stalks[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(21): 51-59. (in Chinese with English abstract)
[13] 由佳翰,陳學庚,張本華,等. 4JSM-2000型棉稈粉碎與殘膜回收聯合作業機的設計與試驗[J]. 農業工程學報,2017,33(10):10-16.
You Jiahan, Chen Xuegeng, Zhang Benhua, et al. Design and experiment of 4JSM-2000 type combined operation machine for cotton stalk chopping and residual plastic film collecting[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(10): 10-16. (in Chinese with English abstract)
[14] 劉師多,牛康,師清翔,等. 玉米果穗螺旋摩擦輸送裝置的輸送性能試驗[J]. 農業工程學報,2013,29(12):9-16.
Liu Shiduo, Niu Kang, Shi Qingxiang, et al. Test of conveying performance of corn ear spiral friction conveyor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(12): 9-16. (in Chinese with English abstract)
[15] 王升升,耿令新,師清翔,等. 螺旋輸送與篩筒組合式分離裝置性能試驗[J]. 農機化研究,2017,39(8):180-185.
Wang Shengsheng, Geng Lingxin, Shi Qingxiang, et al. Performance test of spiral conveying and sieve tube combined separation of agricultural mechanization equipment[J]. Journal of Agricultural Mechanization Research, 2017, 39(8): 180-185. (in Chinese with English abstract)
[16] 謝凡. 肉羊飼喂混合攪拌機混料系統結構設計與研究[D].石河子:石河子大學,2014.
Xie Fan. Structure Design and Research of Mixing System for Sheep Fed Hybrid Mixer[D]. Shihezi: Shihezi University, 2014. (in Chinese with English abstract)
[17] 祝佳利. 垂直振動物料輸送的DEM仿真研究[D]. 沈陽:東北大學,2010.
Zhu Jiali. DEM Simulation Study on Vertical Vibration Material Transportation[D]. Shenyang: Northeastern University, 2010. (in Chinese with English abstract)
[18] 宋歡. 定量螺旋輸送機的優化設計及模擬[D]. 青島:青島科技大學,2016.
Song Huan. Optimum Design and Simulation of Quantitative Screw Conveyor [D]. Qingdao: Qingdao University of Science & Technology, 2016. (in Chinese with English abstract)
[19] 顧曉宇. 柔性葉片螺旋輸送機理及仿真研究[D]. 哈爾濱:哈爾濱商業大學,2014.
Gu Xiaoyu. Mechanism and Simulation of Helical Conveying of Flexible Blade[D]. Harbin: Harbin University of Commerce, 2014. (in Chinese with English abstract)
[20] 李海燕. 基于EDEM的垂直螺旋輸送機性能參數仿真研究[D]. 太原:太原科技大學,2011.
Li Haiyan. EDEM Simulation Study on Performance Parameters of Vertical Helical Conveyor[D]. Taiyuan: Taiyuan University of Science and Technology, 2011. (in Chinese with English abstract)
[21] 楊洋. 基于EDEM的輸糧攪龍輸送性能仿真研究與優化[D]. 成都:西華大學,2016.
Yang Yang. EDEM Simulation and Optimization of Grain Feeding and Auger Transportation Performance[D]. Chengdu: Xihua University, 2016. (in Chinese with English abstract)
[22] 李景彬,郭慶賀,溫寶琴,等. 自走式肉羊飼喂機的設計與試驗[J]. 農機化研究,2016,38(3):218-221.
Li Jingbin, Guo Qinghe, Wen Baoqin, et al.Design and test of the self- propelled machine of sheep feeding[J]. Journal of Agricultural Mechanization Research, 2016, 38(3): 218-221. (in Chinese with English abstract)
[23] 張華,李秀金,蔡璐平,等. 槽式堆肥中攪拌螺旋輸送能力的研究[J]. 農機化研究,2008(4):127-130.
Zhang Hua, Li Xiujin, Cai Luping, et al. Study on material conveyer ability of stirring screws used in trough aerobic composting system[J]. Journal of Agricultural Mechanization Research, 2008(4): 127-130. (in Chinese with English abstract)
[24] 運輸機械設計選用手冊編輯委員會編. 運輸機械設計選用手冊(下冊)[M]. 北京:化學工業出版社,2000.
[25] 蒙賀偉,高振江,坎雜,等. 等徑變螺距奶牛精確飼喂給料裝置設計與試驗[J]. 農業工程學報,2011,27(3):103-107.
Meng Hewei, Gao Zhenjiang, Kan Za, et al. Design and experiment on dairy cow precision-feeding device based on equal-diameter and variable-pitch[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(3): 103-107. (in Chinese with English abstract)
[26] 蒙賀偉,高振江,林海,等. 基于粗精給料奶牛精確飼喂裝備給料系統的研究[J]. 石河子大學學報:自然科學版,2011,29(3):361-366.
Meng Hewei, Gao Zhenjiang, Lin Hai, et al. Study on feeding system of precision feeding equipment based on coarse and fine feeding cows[J]. Journal of Shihezi University: Natural Science, 2011, 29(3): 361-366. (in Chinese with English abstract)
[27] 張氫,夏華,孫遠韜,等. 垂直螺旋輸送機臨界轉速的仿真研究[J]. 中國粉體技術,2017,23(5):1-6.
Zhang Qing, Xia Hua, Sun Yuantao, et al.Simulation research of critical speed for vertical screw conveyor[J]. China Powder Science and Technology, 2017, 23(5): 1-6. (in Chinese with English abstract)
[28] 頓國強,陳海濤,馮夷寧,等. 基于EDEM軟件的肥料調配裝置關鍵部件參數優化與試驗[J]. 農業工程學報,2016,32(7):36-42.
Dun Guoqiang, Chen Haitao, Feng Yining, et al. Parameter optimization and test of key parts of fertilizer allocation device based on EDEM software[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(7): 36-42. (in Chinese with English abstract)
[29] 楊星,于克強,王德福. 基于EDEM的轉輪式TMR混合機混合性能數值模擬[J]. 農機化研究,2017,39(3):218-223.
Yang Xing, Yu Keqiang, Wang Defu. Numerical simulation on mixing performance of paddle-wheel total mixed ration mixer based on EDEM[J]. Journal of Agricultural Mechanization Research, 2017, 39(3): 218-223. (in Chinese with English abstract)
[30] 孟杰,孟文俊. 影響EDEM仿真結果的因素分析[J]. 機械工程與自動化,2014(6):49-51.
Meng Jie, Meng Wenjun. Analysis of influencing factor on results of EDEM simulation[J]. Mechanical Engineering & Automation, 2014(6): 49-51. (in Chinese with English abstract)
Analysis and test of feeding performance of dual-spiral cow feeding device based on EDEM
Qi Jiangtao, Meng Hewei※, Kan Za, Li Chengsong, Li Yaping
(,832000,)
Dairy industry is an economic and efficient livestock husbandry, and it is also an important component of modern agriculture. The healthy development of dairy industry is of great significance for improving the structure of agriculture, for improving the living standards of the people and for promoting the development level of animal husbandry and breeding industry. In recent years, with the rapid development of all sectors of society, people’s living standards are improved; the demand for dairy products and quality requirements are increasing. However, the traditional way of artificial feeding has been unable to meet the needs of rapid development of large scale dairy farms, and scientization, intelligence and automation for cow feeding process have become an inevitable trend. Therefore, for the feeding status of concentrate for dairy cattle, a feeding device based on equal diameter and dual-spiral precision feeding is designed in this paper, which can achieve the accurate supply of concentrate according to the demand of individual cow feeding.The device is mainly composed of a storage bunker, a dual-spiral feeding device and a control system, and the 2 kinds of screw pitches of the dual-spiral feeding device are 40 and 70 mm, respectively. The screw auger device of 70 mm pitch is used to improve the feeding efficiency of the device. And the screw auger device of 40 mm pitch is used to improve the feeding accuracy. By combining the screw auger devices of big pitch and small pitch, the feeding of pellet feed can be quickly and accurately completed within a specified time. The specific work process is as follows: When feeding the target quantity, start both of the material supply ways at the same time; when 80% is completed, stop the screw auger device of big pitch (70 mm pitch), and the screw auger device of small pitch (40 mm pitch) continues to feed until achieving target feed delivery. In the process of design and research, the main structure parameters of the pellet feed feeding device are designed. The dual-spiral feeding device is modeled by using Solidworks software, and EDEM (enhanced discrete element method) software is used to simulate the feeding process of the screw auger devices of 40 and 70 mm at different rotating speeds (80, 100 and 120 r/min) respectively. The results showed that the variation coefficient of the screw auger device of 40 mm pitch was 0.052 2 when the rotation speed was 120 r/min, the variation coefficient of the screw auger device of 70 mm pitch was 0.105 2 when the rotation speed was 100 r/min. In order to further verify the simulation results, a cow feeding device based on equal diameter and dual-spiral precision feeding was set up. Feeding speed stability index was described by variation coefficient, relative error was used to evaluate feeding precision index, and feeding performance test of the screw auger devices of 40 and 70 mm pitch was carried out. The feeding speed was measured at 5, 8 and 10 s in different rotation speeds, and the repetition experiment was carried out 10 times. The results showed when the rotation speed of the screw auger device of 40 mm pitch was 120 r/min and that of the screw auger device of 70 mm pitch was 100 r/min, the feeding stability was the best. The experimental results are consistent with the simulation results. On the basis of the feeding stability of the verification device, the feeding accuracy was tested. The screw auger devices of 40 and 70 mm pitch cooperate in different working speeds, feeding accuracy is not less than 95%; when the rotation speed of the screw auger device of 40 and 70 mm pitch is 120 and 100 r/min, respectively, the feeding time is 14.1 s, the actual feeding quantity is 6.009 kg, and the device feeding accuracy is not less than 99.835%. The results conform to the requirements of the cow precise feeding for efficiency and precision.
control systems; models; tests; cow; dual-spiral; feeding device; feeding speed; stability
10.11975/j.issn.1002-6819.2017.24.009
S817.12
A
1002-6819(2017)-24-0065-07
2017-08-15
2017-11-03
兵團應用基礎研究計劃項目(2016AG011);兵團工業及高新技術科技攻關與成果轉化計劃項目(2015AB001);石河子大學科技項目(ZZZC201740B)
戚江濤,男,內蒙古赤峰人,實驗師,研究方向為農業機械化工程。Email:qjt510014078@163.com
蒙賀偉,男,新疆伊犁新源縣人,副教授,研究方向為農業機械化工程。Email:mhw_mac@shzu.edu.cn
戚江濤,蒙賀偉,坎 雜,李成松,李亞萍. 基于EDEM的雙螺旋奶牛飼喂裝置給料性能分析與試驗[J]. 農業工程學報,2017,33(24):65-71. doi:10.11975/j.issn.1002-6819.2017.24.009 http://www.tcsae.org
Qi Jiangtao, Meng Hewei, Kan Za, Li Chengsong, Li Yaping. Analysis and test of feeding performance of dual-spiral cow feeding device based on EDEM[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(24): 65-71. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.24.009 http://www.tcsae.org
