基于DBOM的廢舊產品可拆卸模型研究
2018-01-09 00:03:52符杰周自強翟棒棒
再生資源與循環經濟 2017年12期
符杰 ,周自強 , 翟棒棒
(1.江蘇華宏科技股份有限公司,江蘇江陰215021;2.常熟理工學院機械工程學院,江蘇常熟215500 3.江蘇省機電產品循環利用技術重點建設實驗室,江蘇常熟215500)
基于DBOM的廢舊產品可拆卸模型研究
符杰1,3,周自強2,3, 翟棒棒3
(1.江蘇華宏科技股份有限公司,江蘇江陰215021;2.常熟理工學院機械工程學院,江蘇常熟215500 3.江蘇省機電產品循環利用技術重點建設實驗室,江蘇常熟215500)
針對廢舊產品拆卸序列規劃的要求,首先需要對廢舊產品的結構特征進行建模,才能正確求解可行的拆解序列。目前常用的可拆卸模型以零部件的幾何特征為依據,忽視了零部件的材料屬性。提出一種結合幾何屬性和材料屬性的DBOM可拆卸模型,該方法可通過產品的設計模型來直接生成,并且有助于拆卸序列的求解能綜合考慮零部件的處理方式。
廢舊產品;拆卸序列;可拆卸模型
研究機電產品的拆解回收,首先必須解決產品零部件的拆卸路徑規劃問題。目前研究人員大多數也都是專注于產品拆解序列的研究,構建了各種拆卸模型,如無向圖、有向圖、與或圖、混合圖、petri網等拆卸模型。這些方法在零部件數量較少時,一般適用性良好,而當零部件達到20及以上時,則會出現“組合爆炸”現象,難以良好應用。
一些研究者基于分層及模塊化思想,構造了拆卸模型,以降低拆卸模型構造的難度,簡化拆卸。姚麗英[1]通過與無向圖的比較,提出了基于無向圖層次結構圖模型,基于產品結構分析制定了序列規劃規則,但是規則主要依賴人工判定,可操作性較差。張廷凱[2]提出了機電產品的分層樹狀模型,但是所建立的模型簡單理想化,實際應用很困難。周喜梅[3]提出了基于模塊化的拆卸回收模型,完全拆卸時效果良好,目標拆卸時則難以使用。郭偉祥[4]構造了產品的層次網絡圖,并進行了實例驗證,但是模型對于目標拆卸同樣缺乏周詳考慮。
基于產品 DBOM(Disassembly Bill of Material),結合廢舊產品的零部件材料屬性和幾何特征關系來表述其拆解模型。在求解拆解序列時,也能通過父子節點的使用和操作,適用于產品完全拆卸和目標拆卸序列生成,方法簡便效率。
1 基于DBOM的可拆卸模型
基于DBOM的可拆卸模型是以產品的物料清單為基礎來建立的,物料清單BOM(Bill of Material指的是構成產品或部件的物料項清單,同時包括零部件的結構關系。按照功能可以劃分為設計BOM、工藝BOM、制造BOM等。文中所提出的DBOM,是從產品拆卸的角度來分析零部件之間的從屬關系,以及基于零部件材料屬性和聯接關系的拆解處理信息,如可再用的零部件、可材料回收的零部件等。
DBOM呈現一種樹狀結構,表示產品、部件和零件從屬關系。從產品拆卸的角度,在產品BOM的基礎上,根據需要構建產品的拆卸結構樹如圖1,產品0由部件1、部件2和零件3組成,部件1由零件4和零件5構成,部件2由零件6,7,8構成。圖1中方塊都稱為一個節點,節點表示產品、裝配體、部件或零件,若一個節點包含另一節點,則節點稱為父節點,另一節點稱為子節點。如圖1中節點3、節點1和節點2是產品0子節點,同時節點1也是節點4和節點5的父節點。此外,產品處于結構樹的最上層因而稱為根節點,沒有子節點的節點稱為葉節點。
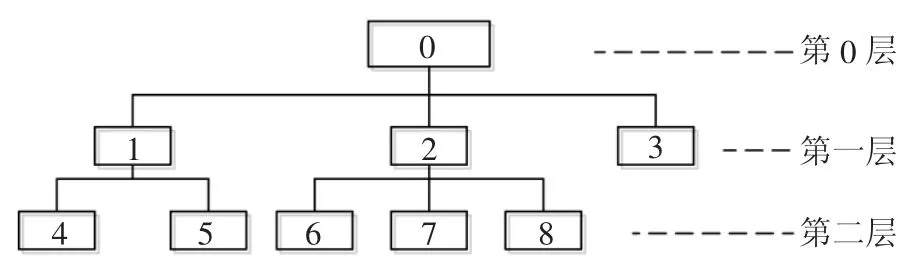
圖1 產品拆卸結構樹
對可以節點進行刪除和打斷操作,刪除葉節點直接刪除即可,刪除非葉節點(根節點不可刪除)則其子節點代替被刪除節點;打斷節點則刪除節點、子節點及至最底層所有節點。
在拆卸時若能把裝配體先從產品上拆卸下來,再進行進一步拆解,有助于提高效率。因而在拆卸結構樹構建時應盡可能合理構建父子關系。產品經層次模塊劃分后的零部件之間存在優先約束關系。約束是指零部件之間的空間制約關系[5],若產品中零件A對零件B的拆除形成空間制約關系,則零件B必須在拆除零件A后才能拆卸,即零件A優先于零件B。拆卸路徑規劃要求,所劃分的裝配體與裝配體之間的約束不能相互交叉,即BOM的構建時同一父節點的子節點之間若存在約束關系必須是單向優先約束關系。如圖1,若節點2的子節點6優先于節點1的子節點4,同時節點1的子節點5優先于節點2的子節點7,則節點1和節點2交叉約束。此時,裝配體(節點1和節點2)的劃分是沒有意義的,因為在序列規劃時,由于兩裝配體相互約束,無法給出拆卸先后順序,這一點,目前研究如文獻[3,4]等都沒有充分考慮到。
產品中零部件之間的優先約束關系可以用優先約束矩陣來表示。優先約束關系矩陣Mp中,若零部件i拆卸完成后,零部件j才能拆卸,則零部件i優先于零部件 j,相應的矩陣 Mp中 Ai,j=1,否則 Ai,j=0,特別需指出 i=j時,Ai,j=0。
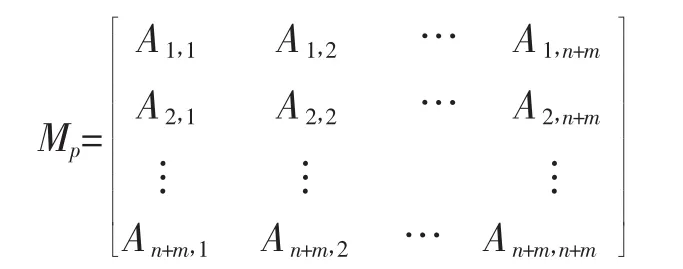
同時,選定一個零部件作為基礎件,基礎件的選定如文獻[1]所述一般為最先進入裝配現場的零件,且多為與其他零件連接最多的零件,所以,定義基礎件的優先級最低。優先約束具有傳導性,即節點A優先于B,B優先于C,則A優先于C。
2 基于DBOM模型的拆卸序列規劃
同樣,首先構造產品的拆卸結構樹,并標注可以整體拆卸的節點(葉節點除外),然后建立產品各層節點優先約束矩陣及所有葉節點優先約束矩陣。選定目標節點后,所構造產品結構樹不可避免地存在一些非葉節點優先約束目標節點,之前的模塊化拆卸研究都是把這些非葉節點所代表的裝配體拆除,把不必要拆卸的節點規劃到拆卸序列中,造成拆卸冗余。在生成目標拆卸序列時,通過對節點的操作取消這部分裝配體劃分,兼顧了效率和實用性。
目標拆卸算法如圖2所示。
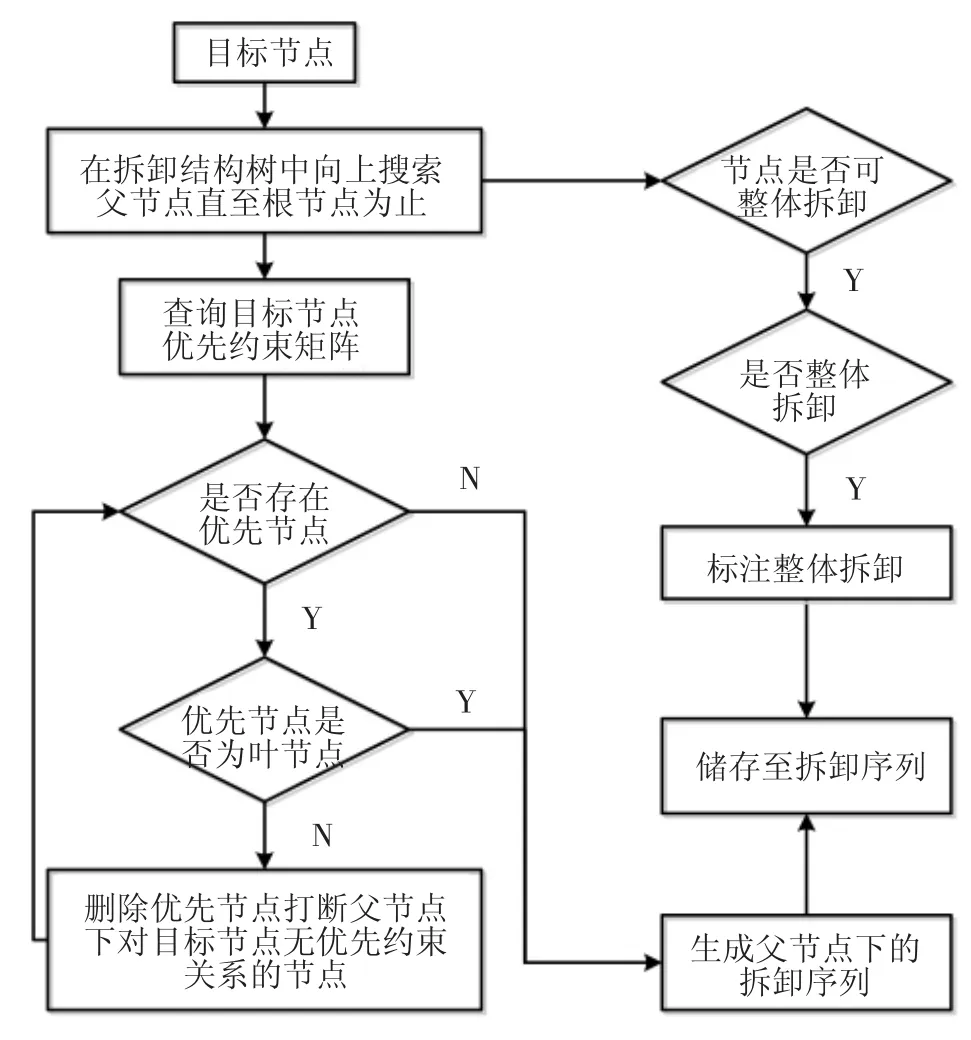
圖2 目標序列生成流程圖
Step1:在產品拆卸結構樹中搜索目標節點(初始值為實際要拆的目標節點)的父節點。
Step2:查詢判斷此時Step1中父節點是否可以整體拆卸,若標注為可整體拆卸,則由人工決定是否執行總體拆卸,若執行則標注節點總體拆卸。
Step3:查詢目標節點優先約束矩陣(父節點下各節點)。
Step4:判斷是否存在優先節點,若不存在,則生成拆卸序列即直接拆除目標節點;若存在優先節點,則在產品拆卸結構樹中查詢優先節點是否為葉節點,若是葉節點則依據優先關系生成拆卸序列,否則刪除優先節點并打斷父節點下對目標節點無優先約束關系的節點,然后跳入Step3。
Step5:將Step1中目標節點值置為其父節點,若目標節點不是第一層節點,跳入Step1;否則,疊加生成最終目標拆卸序列,結束。
3 應用實例
3.1 產品結構分析
這里以廢舊計算機中光驅的拆解為例進行分析。對于具有外殼的產品,要拆內部零部件,都要先拆開產品外殼,即外殼零件的優先級一般最高。光驅零件圖如圖3所示,光驅由1外殼、2讀取模塊、3加載模塊和4主體支架構成。1外殼又由5上蓋、6下蓋、7前面板、8托盤支架頭構成;2讀取模塊由9激光頭支架、10鐵絲架、11光盤驅動電機、12激光頭組件、13進給電機、14導軌構成;3加載模塊由15加載電機、16皮帶輪、17皮帶、18導桿、19齒輪、20半弧卡、21電路板、22光盤托架、23激光頭框架構成。在目標拆卸模式下,拆卸時1外殼雖然優先于2讀取模塊、3加載模塊和4主體支架,但是實際上并不需要全部拆除1外殼,只需拆卸所需方向的1外殼中部分零件即可。
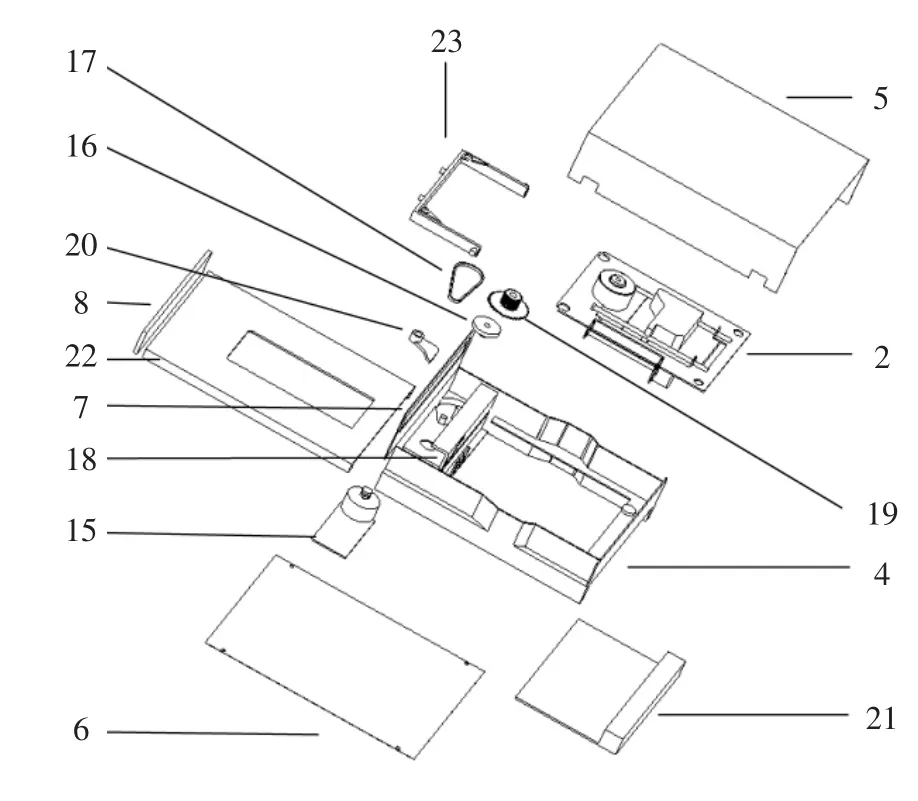
圖3 明基(BenQ)DD185G DVD光驅零件圖
基于BOM劃分裝配體時,主要存在兩種情況:(1)裝配體可以從基礎件上整體拆除,比如圖3所示光驅的2讀取模塊、減速箱中軸與其上齒輪所構成的裝配體;(2)裝配體不能從基礎件上整體拆除光驅的3加載模塊。在第一種情況下,若是完全拆解產品,考慮到從產品拆卸下來后,再進行拆解更為效率,所以可以整體拆除的裝配體顯然是先行整體拆除。而在目標拆卸時,顯然存在兩種拆卸選擇需要進一步判別。
裝配體兩兩之間的優先約束關系,一類是裝配體1中的任意一個零件都優先于裝配體2中所有零件;還有一類,裝配體1中部分零件優先于裝配體2中的部分或全部零件。在第二類情況下,若要拆卸裝配體2中的某個零件,優先約束關系要求拆除裝配體1后再拆卸裝配體2中的目標零件,而實際上裝配體1中只有部分零件優先于目標零件需要拆除(也可能裝配體1中沒有優先于目標零件的零件),這樣拆卸顯然存在冗余,目前的研究模型通過劃分裝配體(或稱模塊)試圖解決由于零件數目過多而造成的組合爆炸問題,但是對于拆卸冗余普遍沒有考慮,顯然與實際不相符合。
基于上述分析,根據BOM劃分裝配體時,除外殼和基礎件外,最大可能使裝配體之間不存在優先約束關系,否則裝配體中的任意一個零件都優先于另一裝配體中所有零件為佳。如果裝配體可以整體拆除,則需人工或比較規則判定整體拆除或是直接拆卸目標零部件。
3.2 完全拆卸序列生成
首先構造產品的拆卸結構樹,并標注可以整體拆卸的節點(葉節點除外),然后建立產品各層節點優先約束矩陣。根據產品第一層節點優先約束矩陣生成第一層節點的拆卸序列,再根據第一層每個節點的子節點優先約束矩陣生成子節點的拆卸序列,以此類推,由上至下進行疊加可得產品的完全拆卸序列。此外,若節點可以整體拆卸,則標注節點整體拆卸。
對上述光驅進行完全拆卸,首先構造光驅拆卸結構樹如圖4所示(其中節點4為指定的基礎件,節點2可整體拆卸),然后建立產品各層節點優先約束矩陣(見圖5和圖6)。根據第一層節點的優先約束矩陣(圖5),按照優先關系推理可得拆卸序列:(1—2—3—4);(1—3—2—4)。然后根據節點1的子節點優先約束矩陣(見圖6第二行第二列),可得拆卸序列:(6—7—8—5);(6—8—7—5);(7—6—8—5);(7—8—6—5);(8—7—6—5);(8—6—7—5)。節點 2、節點 3 各自子節點的拆卸序列同理可以得到,并且節點2整體拆卸后再執行其子節點拆卸序列,最后疊加可得光驅的完全拆卸序列。
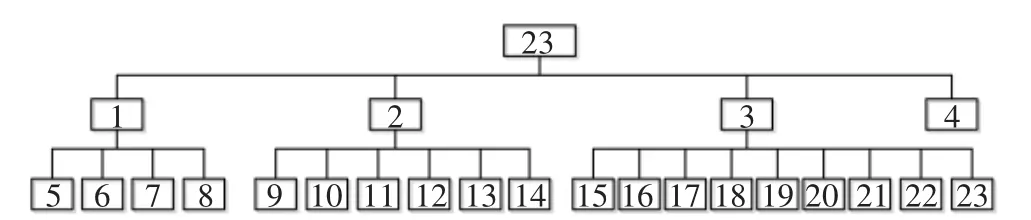
圖4 光驅拆卸結構樹
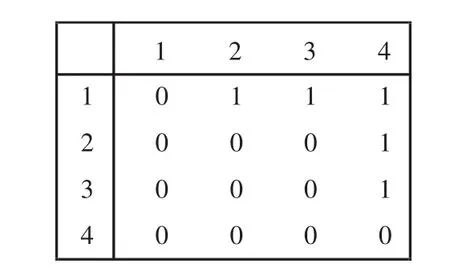
圖5 光驅裝配體優先約束矩陣
對于選擇性拆卸情況,即只拆除產品中的某個領域用于回收。對于上述廢舊光驅而言,在建立拆卸結構樹之后,然后建立產品各層節點優先約束矩陣及所有葉節點優先約束矩陣。按照圖2所示流程圖,假設現在要拆卸光驅的12激光頭組件,則首先向上搜索光驅結構樹,節點12的父節點為節點2,節點2可以整體拆卸,則把整體拆卸屬性信息記錄。查詢節點12在節點2下的優先約束矩陣,節點10和14優先于節點12,節點10和14是葉節點,生成拆卸序列為(10—12);(14—12)。繼續向上搜索光驅結構樹,節點2的父節點為節點0,搜索停止,節點0為產品不可整體拆卸。查詢節點2在節點0下的優先約束矩陣,節點1優先于節點2,節點1不是葉節點,以節點1的子節點取代節點1,以節點12取代節點2(無非優先節點)構成的即為5,6,7,8,12的優先約束矩陣。節點5和7優先于節點12,且節點5和7是葉節點,生成拆卸序列為(7—5—2)。最終序列即為(7—5—10—12);(7—5—14—12)。
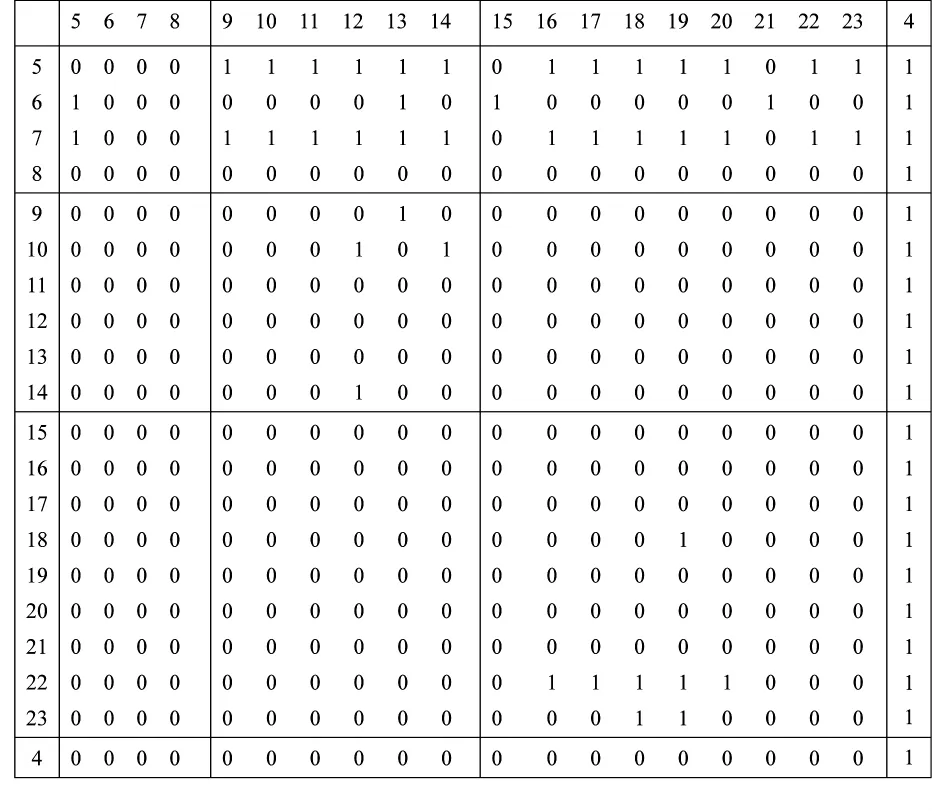
圖6 光驅零件優先約束矩陣
4 結束語
相對于只考慮產品數據結構的可拆卸模型表示方法,基于DBOM的可拆卸模型兼顧了產品的零部件之間在空間上的優先關系。使得廢舊產品的邏輯關系更加符合其實際結構,據此生成的可拆卸序列在拆卸工藝規劃過程中的可操作性也更強。而且基于BOM的可拆卸模型,在生成拆卸序列時運算次數較少。該方法對于解決復雜產品的拆卸序列時,如果結合智能優化算法進行求解,能夠更好地實現拆解工藝的優化。
[1] 姚麗英,高建剛,段廣洪,等.基于分層結構的拆卸序列規劃研究 [J].中國機械工程,2003,14(17):1 516-1 519.
[2] 張廷凱,汪傳生.產品的分層結構模型及其拆卸方法的研究[J].機械工程師,2005(2):78-80.
[3] 周喜梅,鄭清春,郭津津,等.基于模塊化的拆卸模型及拆卸序列規劃研究[J].天津理工大學學報,2009,25(1):26-28.
[4] 郭偉祥,劉志峰,劉光復,等.基于模塊化思想的拆卸序列規劃[J].計算機輔助設計與圖形學學報,2005,17(3):498-504.
[5] 薛俊芳,邱長華,向東.在Pro/E中自動生成零件拆卸優先約束矩陣[J].工程圖學學報,2007(3):24-29.
Research of disassembly model for end of life product based on DBOM
FU Jie1,3,ZHOU Ziqiang2,3,ZHAI Bangbang3
(1.Jiangsu Huahong Technology Stock Co.,Ltd.,Jiangyin 214423,China;2.School of Mechanic Engineering,Changshu Institute of Technology,Changshu 215500,China;3.Jiangsu Key Laboratory of Recycling and Reuse Technology for Mechanical and Electronic Products,Changshu 215500,China)
As the disassembly model with priority matrix based on BOM is proposed,the disassembly sequence could be generated.It solved the combinatorial explosion problem caused by BOM,and the disassembly BOM is adjusted with need,in the meantime the disassembly redundancy problem was solved,which is caused by the division of the assembly with alternative disassembly planning.
end of life product;priority matrix;disassembly sequence
2017-10-19)
X705;TP391
A
1674-0912(2017)12-0025-04
江蘇省科技支撐計劃(工業部分)項目資助(BE2013060)
符杰(1982-),男,江蘇無錫人,碩士,工程師,研究方向:智能制造、優化設計。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2015年1期)2015-08-13 02:23:50
現代企業(2015年9期)2015-02-28 18:56:50
玩具(2009年10期)2009-11-04 02:33:14