永磁同步電機高精度轉速控制方法綜述①
2018-01-08 03:11:24劉京航王志成王昱忠杜少華
計算機系統應用 2017年12期
劉京航,王志成,王 朔,王昱忠,杜少華
1(中國科學院大學,北京 100049)
2(中國科學院 沈陽計算技術研究所 高檔數控國家工程研究中心,沈陽 110168)
3(沈陽高精數控技術有限公司,沈陽 110168)
永磁同步電機高精度轉速控制方法綜述①
劉京航1,2,王志成2,3,王 朔1,2,王昱忠1,2,杜少華2,3
1(中國科學院大學,北京 100049)
2(中國科學院 沈陽計算技術研究所 高檔數控國家工程研究中心,沈陽 110168)
3(沈陽高精數控技術有限公司,沈陽 110168)
電機轉速精度是伺服系統的重要性能指標,傳統PI控制已不能滿足伺服系統的高精度要求. 將先進控制策略應用于永磁同步電機是伺服系統發展的趨勢. 本文介紹了永磁同步電機的精確測速方法和先進控制策略在電機轉速系統中的應用,分析了各種方法的優缺點和適用范圍,綜述了最新的研究成果和有待解決的問題并對將來的研究方向進行了展望.
永磁同步電機; 高精度; 轉速控制; 測速方法; 先進控制策略
永磁同步電機 (Permanent magnet synchronous motor,PMSM)在電機控制理論和電力電子技術的發展下得以迅速的推廣. PMSM具有低損耗、高效率、輸出轉矩大和過載能力強等優點. 但永磁同步電機的控制系統較為復雜且難于調控,使其對控制策略有著更高的要求. 傳統的PI控制對系統的準確模型依賴性較大且控制性能一般,對負載擾動較為敏感,已不能滿足永磁同步電機的高性能需求[1].
近年來,許多先進的控制策略被提出,如預測函數控制、自抗擾控制和模糊控制等. 這些智能控制方法都在一定程度上實現了調速系統的高性能控制[2]. 但每種策略都有其特定的缺點和局限性,如何改進這些控制策略以達到更高性能的控制要求,是時下研究的重點方向. 本文首先介紹了永磁同步電機的精確測速方法,然后基于PMSM的高精度轉速控制領域內最新的研究成果,闡述了先進的控制策略在永磁同步電機控制系統中的應用,分析了每種方法的優缺點并對高精度轉速控制方法的發展做了總結和展望.
1 精確測速方法
在PMSM矢量調速系統中,轉速反饋量的測量精度對伺服系統的性能有很大的影響. 基于增量式光電編碼器的測速方法主要有3種: 測頻法M法,測周期法T法和測頻測周法M/T法.
M法的原理(如圖1)是在一定時間T內,高速時采樣時間內的脈沖數多,測速誤差較小. 當進行高速測量時,M法測速的優勢很明顯,當轉速降低時則誤差隨之增大.
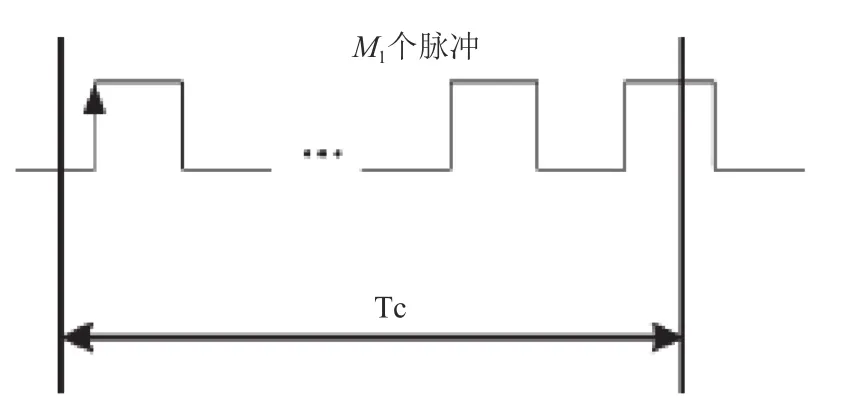
圖1 M法測速原理
T法的原理(如圖2)是在一個輸出脈沖周期內,用一個計數器對已知頻率為f0的高頻時鐘脈沖進行計數,由此來計算轉速. T法在測量較低的速度時能夠獲得較高的分辨率.
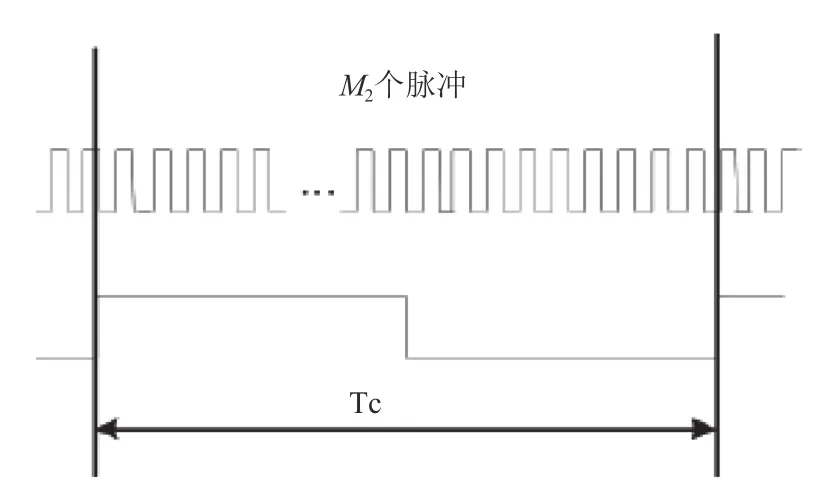
圖2 T法測速原理
M/T法的原理(如圖3)是將M法和T法結合起來,既檢測Tc時間內旋轉編碼器輸出的脈沖個數M1,又檢測同一時間間隔的高頻時鐘脈沖個數M2,用于計算轉速. M/T法的相對誤差與轉速n無關,可以適用于各種轉速下的測量. 但是M/T法的實現較為復雜.
三種測速方法都有其優缺點和適用范圍. 對于測頻法M法來說,當電機轉速很高時,一定時間T內采樣的脈沖數就多,在計算速度時使得測速的誤差減小.但當轉速較低時,M法測速的誤差會增大. 因此測頻法適用于高轉速的電機. 對于測周期法T法,它是以一個輸出周期為基準,通過測量編碼器2個相鄰脈沖之間的時間間隔來計算轉速[3]. 與M法測速相反,在低轉速時,T法測速能夠獲得較高的精度. 隨著電機轉速的增高,T法測速的誤差也增大. 因此T法測速適用于低轉速階段,但當電機轉速過低時,可能會導致測速響應時間過長,無法達到實時控制的效果. M/T法結合了M法和T法的優點,使得它既適用于高轉速階段又適用于低轉速階段,可以在較寬的范圍內得到精確的測速[4]. 但M/T法無論從軟件設計還是硬件配置,實現都比較復雜,而且低轉速實時性差的問題也沒有解決. 依照實際情況選擇合適的方法對實現電機的精確測速十分重要.
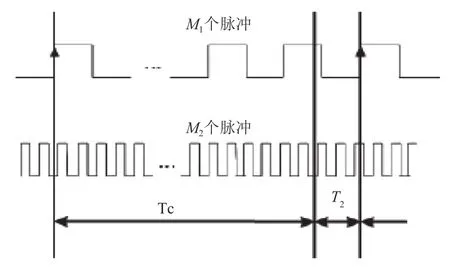
圖3 M/T法測速原理
2 先進控制策略
現代控制理論的發展為先進控制技術奠定了應用理論的基礎. 近些年來,控制理論策略有著很好的發展.一些先進的控制策略(如預測函數控制、自抗擾控制、模糊控制、卡爾曼濾波器、神經網絡、滑模控制)正在逐步引入永磁同步電機的實際應用中. 先進控制策略能夠處理不確定性問題,擺脫了對控制模型的依賴,為推動伺服系統向數字化、智能化方向發展做出了卓越的貢獻.
2.1 預測函數控制
預測函數控制(PFC)是預測控制方法的一種,具有穩態精度高,跟蹤性能好等特點[5]. 但當PFC應用到電機轉速控制系統時,外部負載擾動會影響它的跟蹤性能,進而影響系統的穩態精度.
針對PFC的不足,許多學者對其做了改進. 鄧永停等在預測函數控制的基礎上添加了擾動觀測器,構成了一個雙環控制器[6]. 負載擾動由擾動觀測器進行估計,并對控制量進行實時修正,減少了外部擾動的影響.
周磊等基于狀態空間模型,在PFC的基礎上添加了模糊控制器[7]. 通過對模糊控制器的參數在線自調整,并將其與預測函數控制得到的控制量共同控制被控對象. 這種方法根據控制系統的速度偏差和偏差變化率,利用放大倍數對模糊控制器的參數進行在線修改,控制精度高,結果可靠有效,使系統具有較好的穩定性和魯棒性.
Huixian Liu等設計了使用預測函數控制和擴展狀態觀測器的速度控制系統[8]. 它使用簡化的模型來預測PMSM的未來q軸電流,引入擴展狀態觀測器(ESO)來估計集總干擾. 并且基于對PFC速度控制器的估計干擾增加前饋補償項目,使系統具有快速的瞬態響應和良好的擾動抑制能力.
上述文獻分別通過給預測函數控制添加擾動觀測器、在線調整擾動參數和增加干擾補償等方法,以不同的方式增強了PFC的抗干擾能力. 它們的共同點是利用預測函數控制本身的優點,在此基礎上添加對負載擾動的處理,使系統受到轉動慣量、負載轉矩突變及摩擦力等擾動影響時,能夠保證PFC的跟蹤性能,從而實現調速系統的高性能控制.
2.2 自抗擾控制
自抗擾控制器(ADRC)是韓京清研究員提出的一種新型非線性控制器,它利用誤差反饋控制律的思想來消除參考信號與實際信號之間的誤差. 自抗擾控制通過實時估計并補償系統內外擾動,具有結構簡單,實用性強,魯棒性好等優點[9].
在實際應用中ADRC的可調參數較多,算法的計算量也很大,很多專家對此做了新的改進. 朱儒等在傳統ADRC的基礎上設計了改進的一階自抗擾控制器[10],它為標準自抗擾控制器的系統參考量設計了一個過渡過程. 這種方法能夠使系統跟蹤誤差和參數估計全局一致收斂,使其快速逼近真實值,用以消除其系統穩定性的影響.
黃慶等提出了一種基于滑模變結構的自抗擾控制方法[11],將滑模控制引入到速度及電流自抗擾控制器的設計中,通過對控制器中非線性狀態誤差反饋的參數自整定改進,使控制器保持了原自抗擾控制器特點又使可調參數在切換時平滑過渡,減小了系統的誤差.
Chen Qiang等設計了一種具有鎖相環(PLL)的自抗擾控制器[12]. 它的擴展狀態觀測器用于估計反電動勢,并基于三角函數設計PLL以提取轉子速度信號. 由于反電動勢中存在高頻噪聲信號的估計過程,此設計使用鎖相環(PLL)方法而不是直接計算提取轉子速度,使輸出值可以很好跟蹤到輸入值,提高了轉速控制的穩態精度.
自抗擾控制通過非線性函數實現,參數較多不易調節,容易造成轉矩脈動和調速系統的不穩定. 上述文獻分別通過安排過渡過程、自整定改進參數、添加鎖相環等方法,提高了自抗擾控制的性能. 這些方法的核心都是對自抗擾控制的可調參數做修整. 此外還可以從減少待整定參數的個數,對系統參數進行良好估計等方面對自抗擾控制做進一步的改進和提高.
2.3 模糊控制
模糊控制能夠對系統參數進行良好估計并根據外部信息進行智能判斷,是一種靈活的非線性控制策略.由于控制算法規則簡單,又能夠嚴格客觀的反應受控過程中輸出變量的動態特性,因此這種結構的模糊控制器被廣泛使用.
張云紅等設計了一種模糊自適應PI調節控制器[13],它的核心是具有智能計算的模糊控制器. 這種模糊自適應PI控制器結合了模糊控制和PI控制的優點,它能根據外部變化不斷調節PI控制器的比例增益和積分增益. 不足之處在于只考慮了外部環境的變化,并未考慮系統本身參數的變化.
方一鳴等設計了一種基于反推的自適應模糊控制器[14]. 這種控制器采用自適應算法估計負載擾動、粘性摩擦系數和轉動慣量,利用自適應算法和模糊邏輯系統的萬能逼近作用來處理系統的不確定性和參數攝動問題[2]. 這種控制方法能夠更好地跟蹤轉速給定值,使系統具有良好的動靜態性能和很強的魯棒性.
模糊控制具有良好的適應性和靈活性,具備較高的魯棒性以抵抗參數擾動. 然而由于算法計算量較大,模型較復雜,使得模糊控制在實際控制系統中的應用受到限制,如何在保證效果的同時簡化算法復雜度,提高效率仍有待進一步的研究.
2.4 卡爾曼濾波器
卡爾曼濾波(KF)是利用線性系統狀態方程,通過系統輸入輸出觀測數據,對系統狀態進行最優估計.KF是一種現代濾波方法. 改進的卡爾曼濾波器在伺服驅動系統中有著重要的作用[15],其優越的特性引起了大量學者的研究興趣.
王爽等提出了一種采用卡爾曼濾波器的改進預測函數控制方法[16]. 這種方法在伺服系統的數學模型的基礎下,構建了卡爾曼濾波器模型. 通過卡爾曼濾波器觀測出轉子位置、轉速信息和負載轉矩. 預測函數控制器用于接收觀測的轉矩與轉速信息. 這個過程在一定程度上消除了擾動影響,解決了控制系統的轉矩脈動大的缺陷.
尹忠剛等設計了一種抗差擴展卡爾曼濾波控制器[17].粗差對擴展卡爾曼濾波器的估算精度有一定的影響,在應用于感應電機轉速估計時,抗差擴展卡爾曼濾波器能夠取得良好的估計精度. 這種控制器有著優于EKF的抗粗差性能,有利于削弱粗差對轉速估計結果的影響. 不足之處是抗差擴展卡爾曼濾波器的算法計算量較大. 要將其運用到實際系統中需要考慮計算量過大的問題,對它算法的簡化與降階仍有待于進一步研究.
2.5 神經網絡
神經網絡是一種新型非線性系統. 它的特殊之處是能夠模擬人腦神經網絡的結構和功能,可以映射任意復雜的非線性關系. 神經網絡的優勢在于能夠像人腦那樣并行處理數據并進行自學習,此外它還具有分布存儲信息的功能. BP神經網絡是應用最廣泛的一種人工神經網絡,它是一種是多層前向網絡,對非線性可微分函數進行權值訓練.
Tummala SK等提出了一種基于神經網絡的滑模控制器[18]. 這種方法利用滑模控制和徑向基函數神經網絡(RBFNN)來實現魯棒性. 所提出的神經網絡滑模控制規律可以避免計算感應電動機中不確定性的限制,并且對這些不確定性是魯棒的. 與傳統的SMC不同,RBFNN控制器取代滑模控制器的輸出以消除不希望的抖動. 通過使用新的控制方法可以有效地減少所提出的滑動模式表面周圍的振動.
Zolfaghari M等設計了一種新型自適應神經模糊控制器[19]. 此控制器是具有基于人工神經網絡結構的自調整縮放因子的模糊邏輯控制器. 它有兩個輸入變量和一個控制輸出變量. 基于模糊邏輯控制規則,然后描述Narchitecture以自調節控制器的輸出縮放因子.這種方法確保了快速和準確的動態響應,具有優秀的穩態性能.
神經網絡的非線性擬合能力很強. 其學習規則簡單,便于計算機實現. 但神經網絡的體系結構通用性差,無法應對數據不充分的情況,如何優化仍需進一步研究.
2.6 滑模控制
做為變結構控制的一種,滑模控制(SMC)的系結構在運行中不斷進行變化. 這樣的控制方式使得系統的狀態沿著設定的狀態軌跡做小幅度的上下運動,即所謂的“滑動模態”. 當系統參數變化時,滑模變結構控制的適應性較強,其系統的狀態與系統的干擾以及參數攝動無關. 但是滑模控制本質上存在高頻抖振現象,針對這一情況,一些學者對其做了改進.
陳振等設計了一種基于積分時變滑模控制系統[20].這種方法在滑模面的設計中引入誤差信號的積分項和時變項,在保證系統全局穩定的前提下提高了滑模面的收斂速度,同時避免了控制量中對加速度信號的要求,有效的減少了系統的魯棒性并增強了系統的抗干擾能力.
楊代利等提出了基于模糊時變的滑模結構控制器[21].這種控制器采用模糊推理的方法來確定切換增益,它根據滑模控制原理能夠更有效和合理的得到切換增益的準確值. 當轉速變化時,切換增益估計值能及時得到調整,以保證合適的切換增益,補償控制環節,使得轉速快速準確到達穩態.
Zou Q等設計了一種自適應模糊PI滑動模式控制器(AFPISMC)[22]. 這種方法研究了具有比例加積分等效控制動作的自適應滑模控制器,其中簡單的自適應算法用于廣義軟切換參數. 它使用模糊邏輯技術來動態地控制SMC等效控制動作的參數設置. 在該方法中,控制動作可被平滑化進而減少顫動現象.
由于控制的不連續性,使得滑模變結構控制系統存在“抖振”問題. 上述文獻通過對傳統滑模控制的改進,從不同方面消除了SMC的高頻抖振現象. 但在負載轉矩突變及控制系統參數變化的情況下仍然存在抖振的問題. 如何從根本上解決系統抖振仍然是一個值得研究的問題.
3 研究趨勢與展望
先進控制策略為伺服系統的發展開辟了新的道路,相比傳統的PI控制,先進的控制方法在性能方面都有明顯的提升,但每種方法也都有自己的不足和局限性.先進的控制方法在伺服系統上的應用并未十分成熟[23].在實際應用中,不僅需要考慮控制算法的時間復雜度,反饋實時性等,永磁同步電機也要受到外部環境變化、系統自身參數變化、電機運行溫度和磁飽和度等多方面的影響,因此在傳統控制策略的基礎上進行創新以滿足伺服系統的工作要求是高精度轉速控制方法面臨的重大挑戰. 如何將先進的智能控制策略與永磁同步電機進行完美的融合將是未來伺服系統發展的大方向.
4 總結
先進的智能控制算法是提高永磁同步電機轉速精度的有效途徑之一,對伺服控制系統的發展有著重大的意義. 本文介紹了永磁同步電機的精確測速方法和預測函數控制、自抗擾控制等先進的智能控制方法.先進控制策略相比PI控制有著明顯的優勢但也都存在固有的缺陷和局限性. 針對此問題,許多專家學者對這些智能控制方法做出了改進,以提高電機轉速的控制精度. 目前智能控制策略在永磁同步電機伺服系統中的應用還并不十分成熟,如何對智能控制方法進行改進和整合仍然需要進一步的探索和研究. 近年來,國內外有許多專家學者在高精度轉速控制領域內做著積極的探索和研究,該領域依然有著巨大的發展潛力. 相信不斷會有新的控制策略提出,以推動工業科技的進步和發展.
1Dursun M. The analysis of different techniques for speed control of permanent magnet synchronous motor. Tehnicki Vjesnik,2015,22(4): 947–952. [doi: 10.17559/TV-201409 12141639]
2Chang YC,Chen CH,Zhu ZC,et al. Speed control of the surface-mounted permanent-magnet synchronous motor based on Takagi-Sugeno fuzzy models. IEEE Trans. on Power Electronics,2016,31(9): 6504–6510. [doi: 10.1109/TPEL.2015.2504392]
3周昂揚,張志安,吳勇. 一種M/T 混合測速法的研究與實現. 兵工自動化,2017,36(1): 50–54.
4閆丹,吳慶廣. 電動機測速及顯示分析. 防爆電機,2016,51(1):38–39,45.
5Lin CK,Yu JT,Lai YS,et al. Simplified model-free predictive current control for interior permanent magnet synchronous motors. Electronics Letters,2016,52(1): 49–50.[doi: 10.1049/el.2015.2372]
6鄧永停,李洪文,王建立,等. 基于預測函數控制和擾動觀測器的永磁同步電機速度控制. 光學精密工程,2014,22(6): 1598–1605.
7周磊,黃家才,林健,等. 基于模糊預測函數的直線伺服系統的速度控制. 機械設計與制造,2013,(4): 195–198.
8Liu HX,Li SH. Speed control for PMSM servo system using predictive functional control and extended state observer.IEEE Trans. on Industrial Electronics,2012,59(2):1171–1183. [doi: 10.1109/TIE.2011.2162217]
9Ning S,Zheng SH,Wang XZ. The active disturbance rejection control with feed-forward compensation for hydraulic pump controlled motor speed system. Fifth International Conference on Intelligent Control and Information Proc. Dalian,China. 2015.
10朱儒,劉鯤鵬,崔恒彬,等. 自抗擾控制技術在永磁同步電動機速度控制中的應用. 微特電機,2014,42(5): 60–62.
11黃慶,黃守道,馮垚徑,等. 基于變結構自抗擾的永磁電動機速度控制系統. 電工技術學報,2015,30(20): 31–39. [doi:10.3969/j.issn.1000-6753.2015.20.004]
12Chen Q,Dong F,Tao L,et al. Sensorless speed control of permanent magnet synchronous motor system based on active disturbance rejection control. 2016 Chinese Control and Decision Conference (CCDC). Yinchuan,China. 2016.
13張云紅,曾成碧,吳傳來,等. 模糊控制在永磁同步電機調速系統中的應用. 微電機,2012,45(7): 69–73.
14方一鳴,任少沖,王志杰,等. 永磁同步電動機轉速自適應模糊 Backstepping 控制. 電機與控制學報,2011,15(6):97–102.
15Gopinath GR,Das Shyama P. Sensorless control of permanent magnet synchronous motor using square-root cubature Kalman filter. 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia). Hefei,China. 2016.
16王爽,朱文舉,黃蘇融,等. 采用卡爾曼濾波器的 PMSM 改進預測函數控制. 電機與控制學報,2015,19(7): 88–94.
17尹忠剛,趙昌,鐘彥儒,等. 采用抗差擴展卡爾曼濾波器的感應電機轉速估計方法. 中國電機工程學報,2012,32(18):152–159.
18Tummala SK. Artificial neural networks based speed control of permanent magnet synchronous motor. International Conference on Soft Computing,Intelligent Systems &Applications. Bangalore,India. 2016.
19Zolfaghari M,Taher SA,Munuz DV. Neural network-based sensorless direct power control of permanent magnet synchronous motor. Ain Shams Engineering Journal,2016,7(2): 729–740. [doi: 10.1016/j.asej.2016.01.002]
20陳振,耿潔,劉向東. 基于積分時變滑模控制的永磁同步電機調速系統. 電工技術學報,2011,(6): 56–61.
21楊代利,張宏立,劉璨. 基于模糊時變滑模控制的 PMSM轉速控制. 計算機仿真,2014,31(7): 351–354,365.
22鄒權,錢林方,蔣清山. 永磁同步電機伺服系統的自適應模糊滑模控制. 控制理論與應用,2015,32(6): 817–822.
23黃乙晉,陳釗. 先進控制理論在同步發電機調速控制系統中的應用. 四川電力技術,2015,(3): 90–94.
Review of High Precision Speed Control Methods for Permanent Magnet Synchronous Motor
LIU Jing-Hang1,2,WANG Zhi-Cheng2,3,WANG Shuo1,2,WANG Yu-Zhong1,2,DU Shao-Hua2,3
1(University of Chinese Academy of Sciences,Beijing 100049,China)
2(National Engineering Research Center for High-End CNC,Shenyang Institute of Computing Technology,Chinese Academy of Sciences,Shenyang 110168,China)
3(Shenyang Golding NC Tech. Co. Ltd.,Shenyang 110168,China)
The motor speed accuracy is an important performance index of the servo system. The traditional PI control cannot meet the high precision requirements of servo system. The application of advanced control strategy to permanent magnet synchronous motor is the development trend of servo system. This paper introduces the application of the precision velocity measurement method and the advanced control strategy of the permanent magnet synchronous motor in the motor speed system,analyzes the advantages and disadvantages and the scope of the various methods,summarizes the latest research results and the problems to be solved,and the future The research direction is forecasted.
PMSM; high accuracy; speed control; speed method; advanced control strategy
劉京航,王志成,王朔,王昱忠,杜少華.永磁同步電機高精度轉速控制方法綜述.計算機系統應用,2017,26(12):32–36. http://www.c-sa.org.cn/1003-3254/6129.html
“高檔數控機床與基礎制造裝備”國家科技重大專項(2014ZX04014021)
2017-03-21; 修改時間: 2017-04-13; 采用時間: 2017-04-24
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
通信電源技術(2016年1期)2016-04-16 04:57:26
Coco薇(2016年2期)2016-03-22 02:42:52
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
