基于細(xì)菌覓食決策和深度置信網(wǎng)絡(luò)的滾動軸承故障診斷
2017-12-27 10:31:22劉義倫楊大煉賓光富
振動與沖擊 2017年23期
陶 潔, 劉義倫, 楊大煉, 賓光富
(1. 中南大學(xué) 機(jī)電工程學(xué)院,長沙 410083;2. 湖南科技大學(xué) 知識處理與網(wǎng)絡(luò)化制造實驗室,湖南 湘潭 411201;3. 中南大學(xué) 輕合金研究院,長沙 410083;4. 湖南科技大學(xué) 機(jī)械設(shè)備健康維護(hù)湖南省重點實驗室,湖南 湘潭 411201)
基于細(xì)菌覓食決策和深度置信網(wǎng)絡(luò)的滾動軸承故障診斷
陶 潔1,2, 劉義倫1,3, 楊大煉1,4, 賓光富4
(1. 中南大學(xué) 機(jī)電工程學(xué)院,長沙 410083;2. 湖南科技大學(xué) 知識處理與網(wǎng)絡(luò)化制造實驗室,湖南 湘潭 411201;3. 中南大學(xué) 輕合金研究院,長沙 410083;4. 湖南科技大學(xué) 機(jī)械設(shè)備健康維護(hù)湖南省重點實驗室,湖南 湘潭 411201)
在利用深度置信網(wǎng)絡(luò)進(jìn)行滾動軸承故障診斷時,網(wǎng)絡(luò)結(jié)構(gòu)的設(shè)置不僅影響診斷的結(jié)果,還影響計算效率。為提高滾動軸承故障診斷的準(zhǔn)確率,提出基于細(xì)菌覓食決策和深度置信網(wǎng)絡(luò)的滾動軸承故障診斷方法。該方法利用采集的樣本數(shù)據(jù)對深度置信網(wǎng)絡(luò)進(jìn)行訓(xùn)練,以構(gòu)造細(xì)菌覓食決策算法的適應(yīng)度函數(shù),通過計算各個細(xì)菌的適應(yīng)度來衡量模型的優(yōu)劣。由于細(xì)菌覓食決策算法具有并行搜索能力,能有效選取深度置信網(wǎng)絡(luò)各隱節(jié)點數(shù)、學(xué)習(xí)率、動量等參數(shù),生成合適的分類器提高滾動軸承故障診斷的準(zhǔn)確率。實驗中,與SVM(Support Vector Machines)、BPNN(Back Propagation Neural Network)、KNN(k-Nearest Neighbor)等方法做比較,所提方法對滾動軸承故障診斷的準(zhǔn)確率達(dá)到97.83%,能更加高效、準(zhǔn)確的識別滾動軸承故障。
深度置信網(wǎng)絡(luò);細(xì)菌覓食決策算法;滾動軸承;故障診斷
滾動軸承是旋轉(zhuǎn)機(jī)械的核心部件,在使用過程中,由于疲勞、磨損、過載、腐蝕等原因,容易造成滾動軸承的損傷[1]。目前,對滾動軸承的故障診斷技術(shù)主要集中在信號分析和智能診斷兩方面。當(dāng)滾動軸承發(fā)生故障時,振動信號呈現(xiàn)非平穩(wěn)、非線性的特點,故障特征常常被設(shè)備的工作頻率、噪聲等淹沒,因此傳統(tǒng)的信號處理與分析很難取得較好的結(jié)果[2-3]。在智能診斷方面,主要采用的診斷方法有:支持向量機(jī)(Support Vector Machines, SVM)、人工神經(jīng)網(wǎng)絡(luò)(Artificial Neural Network, ANN)、流行學(xué)習(xí)(Manifold Learning, ML)、核方法(Kernel Method, KMs)等模式識別方法[4]。這些方法在機(jī)械設(shè)備故障診斷中取得了一定的成果,但它們均屬于“淺層學(xué)習(xí)”的算法結(jié)構(gòu),要在一到兩層的模型結(jié)構(gòu)中完成函數(shù)擬合,因此故障診斷的結(jié)果不穩(wěn)定[5-6]。
深度學(xué)習(xí)是一種新興的機(jī)器學(xué)習(xí)方法,它主要模擬人腦結(jié)構(gòu),通過層次化學(xué)習(xí)實現(xiàn)數(shù)據(jù)的高效處理。Schmidhuber等[7-10]提出的深度置信網(wǎng)絡(luò)(Deep Belief Network, DBN)及其訓(xùn)練算法,已成為深度學(xué)習(xí)領(lǐng)域的一個主要模型框架,在語音、圖像、手寫體識別、多媒體檢索等領(lǐng)域取得了良好的效果,并在故障診斷領(lǐng)域得到初步應(yīng)用。Tran等[11-12]應(yīng)用DBN對機(jī)械設(shè)備健康狀況進(jìn)行監(jiān)測和識別,實驗證明DBN能有效識別設(shè)備的故障狀態(tài)。Sun等[13-14]通過信號處理提取監(jiān)測信號的故障特征,用深度學(xué)習(xí)實現(xiàn)機(jī)械故障類型及故障損傷程度的診斷。單外平等[15]研究了DBN對滾動軸承原始振動信號的重構(gòu)和特征提取。Shao等[16]提出時域特征提取和粒子群優(yōu)化的DBN,對滾動軸承進(jìn)行故障診斷。但以上研究僅憑經(jīng)驗或反復(fù)實驗對DBN結(jié)構(gòu)參數(shù)進(jìn)行設(shè)置,模型優(yōu)化訓(xùn)練時間長,難以確保故障診斷的準(zhǔn)確率。
為提高滾動軸承故障診斷的準(zhǔn)確率,減少模型的優(yōu)化時間,本文提出基于細(xì)菌覓食決策算法和深度置信網(wǎng)絡(luò)的故障診斷方法。利用細(xì)菌覓食決策算法(Bacterial Foraging Algorithm, BFA)的并行搜索能力,對DBN的模型參數(shù)進(jìn)行優(yōu)化選擇。該方法采用DBN對樣本數(shù)據(jù)的訓(xùn)練來構(gòu)造適應(yīng)度函數(shù),用訓(xùn)練誤差閾值作為細(xì)菌決策算法迭代的終止條件,將BFA與DBN的參數(shù)優(yōu)化相關(guān)聯(lián),有效生成合適的分類器提高滾動軸承故障診斷的準(zhǔn)確率。
1 DBN基礎(chǔ)理論
DBN是一種多隱層的概率生成模型,通過訓(xùn)練各節(jié)點間的權(quán)值,使整個模型的生成概率最大化。圖1是DBN的基本結(jié)構(gòu),由若干個受限玻爾茲曼機(jī)(Restrict Boltzmann machine, RBM)和一個反向傳播神經(jīng)網(wǎng)絡(luò)(BPNN)組成。其中,RBM是有向連接的兩層神經(jīng)網(wǎng)絡(luò),一個RBM的輸出作為下一個RBM的輸入,不斷疊加構(gòu)成多隱層結(jié)構(gòu)。

圖1 DBN基本結(jié)構(gòu)Fig.1 The basic structure of DBN
RBM的基本結(jié)構(gòu)如圖2所示,其中vi為輸入層顯節(jié)點,hi為輸出層隱節(jié)點,顯節(jié)點和隱節(jié)點有向全連接,而顯節(jié)點之間以及隱節(jié)點之間沒有連接。c為輸入層的偏置項,b為輸出層的偏置項,w為顯節(jié)點到隱節(jié)點的連接權(quán)值,b,c,w構(gòu)成模型的權(quán)值集θ。

圖2 受限玻爾茲曼機(jī)Fig.2 Restrict Boltzmann Machine
RBM的能量函數(shù)定義為

(1)
用能量函數(shù)定義顯節(jié)點和隱節(jié)點的聯(lián)合概率分布函數(shù),其中Z(θ)為配分函數(shù),以實現(xiàn)歸一化操作:

(2)
(3)
在RBM中,給定模型輸入向量v的值,則輸出層隱節(jié)點hi的激活概率為

(4)
給定模型輸出層向量h的值,輸入層顯節(jié)點vi的激活概率為
(5)
為得到模型的最優(yōu)解,用訓(xùn)練集(D)的負(fù)對數(shù)似然函數(shù)作為損失函數(shù):
(6)
通過損失函數(shù)對參數(shù)集(θ)的偏導(dǎo)數(shù)更新各個權(quán)值,計算公式如(7),其中<:>d是數(shù)據(jù)樣本統(tǒng)計概率,<:>m是模型的生成概率。
(7)
DBN通過調(diào)整各節(jié)點權(quán)值,使節(jié)點的樣本統(tǒng)計概率與模型生成概率盡量相等,從而實現(xiàn)數(shù)據(jù)的預(yù)測與分類。DBN的訓(xùn)練分兩個階段:自底向上的逐層訓(xùn)練每個RBM和自頂而下的微調(diào)網(wǎng)絡(luò)權(quán)值。在RBM中,數(shù)據(jù)樣本的無偏統(tǒng)計概率可以用公式(4)、(5)計算得到,而模型生成的無偏概率卻很難獲得。Hinton等提出對比散度算法,通過1次Gibbs采樣得到RBM分布的近似值,計算公式如(8),其中σ為學(xué)習(xí)率,λ為動量。
(8)
2 基于細(xì)菌覓食決策算法的DBN
由于目前深度置信網(wǎng)絡(luò)的參數(shù)設(shè)置,缺乏有效的訓(xùn)練算法,在參數(shù)選擇上主要靠經(jīng)驗或反復(fù)實驗。BFA是一種基于并行搜索的全局優(yōu)化算法,具有群體智能特性,易跳出局部極值找到最優(yōu)解[17]。因此BFA為解決DBN的參數(shù)設(shè)置問題,提供了有效的途徑。圖3是BFA對深度置信網(wǎng)絡(luò)優(yōu)化的過程。選取S個細(xì)菌,同時對DBN的隱節(jié)點數(shù)、學(xué)習(xí)率和動量并行搜索。其中Nc、Nre、Ned分別表示趨向、復(fù)制、遷移操作需要執(zhí)的次數(shù),i,j,k分別表示三個操作的計數(shù)參數(shù)。

圖3 基于細(xì)菌覓食決策算法的優(yōu)化流程圖Fig.3 Optimization flow chart of bacterial foraging algorithm
BFA-DBN參數(shù)優(yōu)化流程如下:
(1)初始化BFA的參數(shù)Nc、Nre、Ned、S,設(shè)置DBN隱層數(shù)l,隱節(jié)點數(shù)n,學(xué)習(xí)率a,動量m的解析空間;
(2)在解析空間內(nèi)隨機(jī)產(chǎn)生S個細(xì)菌,計算每個細(xì)菌的適應(yīng)度;
(3)若細(xì)菌的適應(yīng)度小于閾值,則輸出DBN產(chǎn)生分類器,否則執(zhí)行趨向、復(fù)制或遷移操作;
(4)令Pt(i,j,k)為第t個細(xì)菌,執(zhí)行完第i次趨向性操作、第j次復(fù)制操作和第k次遷移操作后的位置:
Pt(i+1,j,k)=Pt(i,j,k)+Ct(i,j,k)V(i,j,k)
(9)
式中:Ct(i,j,k)為細(xì)菌前進(jìn)和翻轉(zhuǎn)運動的步長;Vt(i,j,k)為隨機(jī)產(chǎn)生的方向向量。
Ct(i,j,k+1)=Ct+1(i,j,k+1)/M1
(10)
Ct=(i,j+1,k)=[max(F(i,j,k))-
min(F(i,j,k))]/M2
(11)
式中:M1為第t個細(xì)菌執(zhí)行趨向性操作的次數(shù);M2為比例縮放因子;若第t個細(xì)菌個體沒有發(fā)生遷徙操作,則
Ct(i+1,j,k)=Ct(i,j,k)
(12)
否則Ct(i+1,j,k)=Ct+1(i,j+1,k)
(13)
(5)計算新種群中各細(xì)菌個體的適應(yīng)度,若訓(xùn)練誤差小于閾值,則輸出DBN生成分類器,否則重復(fù)(3)~(4)過程,直至迭代結(jié)束。
實現(xiàn)細(xì)菌覓食決策算法尋找全局最優(yōu)解的關(guān)鍵是,確定適應(yīng)度函數(shù)和終止條件[20]。本文采用樣本數(shù)據(jù)對DBN的訓(xùn)練來構(gòu)造細(xì)菌覓食決策算法的適應(yīng)度函數(shù),并設(shè)置訓(xùn)練誤差的閾值作為BFA迭代的終止條件,計算步驟如下:
(1)令第t個細(xì)菌的適應(yīng)度為Pt=(lt,nt,at,mt),則DBN的第一隱層節(jié)點數(shù)為nt,第二隱層節(jié)點數(shù)為lt,學(xué)習(xí)率為at,動量為mt,初始化DBN參數(shù)集θ;
(2)v0為輸入樣本向量,d為DBN迭代次數(shù),e為DBN的訓(xùn)練誤差;
(3)利用公式(4)、(5)計算RBM各顯層和隱層的特征向量h0,v0,h1,v1,…,hlt;
(4)利用公式(7)得到RBM初始狀態(tài)與更新狀態(tài)下聯(lián)合概率分布,代入公式(8)修正參數(shù)集θ;
(5)用隨機(jī)批處理對訓(xùn)練集迭代d次,重復(fù)(3)~(4)過程;
(6)用BPNN微調(diào)各隱層參數(shù)的權(quán)值θ。

通過適應(yīng)度函數(shù),將細(xì)菌覓食決策算法的并行搜索與DBN的參數(shù)優(yōu)化相關(guān)聯(lián),其中適應(yīng)度的高低可以有效衡量DBN模型的優(yōu)劣,從而產(chǎn)生合適的故障診斷分類器,提高滾動軸承的故障診斷精度。
3 滾動軸承振動測試實驗
為驗證所提方法的可行性和有效性,本文采用HRB公司生產(chǎn)的NU205圓柱滾動軸承,進(jìn)行故障診斷實驗。為模擬軸承輕微故障和嚴(yán)重故障,分別對滾動軸承內(nèi)圈、外圈進(jìn)行點蝕和線切割加工。如圖4所示,點蝕故障直徑為0.5 mm,線切割故障寬度為0.5 mm,長度為12 mm。

(a) 正常滾動軸承

(b) 內(nèi)圈點蝕直徑 0.5 mm

(c) 內(nèi)圈線切割直徑 0.5 mm

(d) 外圈點蝕直徑 0.5 mm

(e) 外圈線切割直徑 0.5 mm圖4 實驗滾動軸承Fig.4 Rolling bearings of experiments
利用QPZZII旋轉(zhuǎn)機(jī)械故障實驗臺及德維創(chuàng)信號采集儀,采集滾動軸承工作狀態(tài)下的振動信號。實驗臺如圖5所示,主要由電機(jī)、皮帶輪、傳動支座、聯(lián)軸器、軸承座組成。試件軸承安裝在軸承座內(nèi),傳感器垂直安放在軸承座上方。

圖5 旋轉(zhuǎn)機(jī)械故障模擬實驗臺Fig.5 Rotating machinery fault simulation test bench
實驗中,軸承轉(zhuǎn)速為1 200 r/min,載荷為500 N,采樣頻率為10 kHz,采樣時長6 s。五個試件的振動信號時域波形,如圖6所示。
實驗中,滾動軸承外圈與軸承座過盈配合,內(nèi)圈與轉(zhuǎn)軸相連,滾動軸承隨轉(zhuǎn)軸同步旋轉(zhuǎn)。當(dāng)滾動軸承存在局部損傷時,會引起振動信號突變產(chǎn)生相應(yīng)的沖擊特征。但實驗中試件故障比較相似,引起的沖擊特征經(jīng)過軸承座、滾動體、保持架后,能量會衰減損耗,因此各振動信號中的沖擊特征比較接近,難以區(qū)分滾動軸承的各種故障。
4 實驗結(jié)果與分析
每次實驗,傳感器采集60 000個振動加速度信號,順序截取500個信號,構(gòu)成1個數(shù)據(jù)樣本。每種試件的振動信號構(gòu)成120個數(shù)據(jù)樣本,隨機(jī)選擇100個樣本作為訓(xùn)練樣本,剩下20個作為測試樣本。五種試件的振動信號,構(gòu)成500×500的訓(xùn)練集和500×100的測試集。

(a) 正常滾動軸承

(b) 內(nèi)圈點蝕直徑0.5 mm
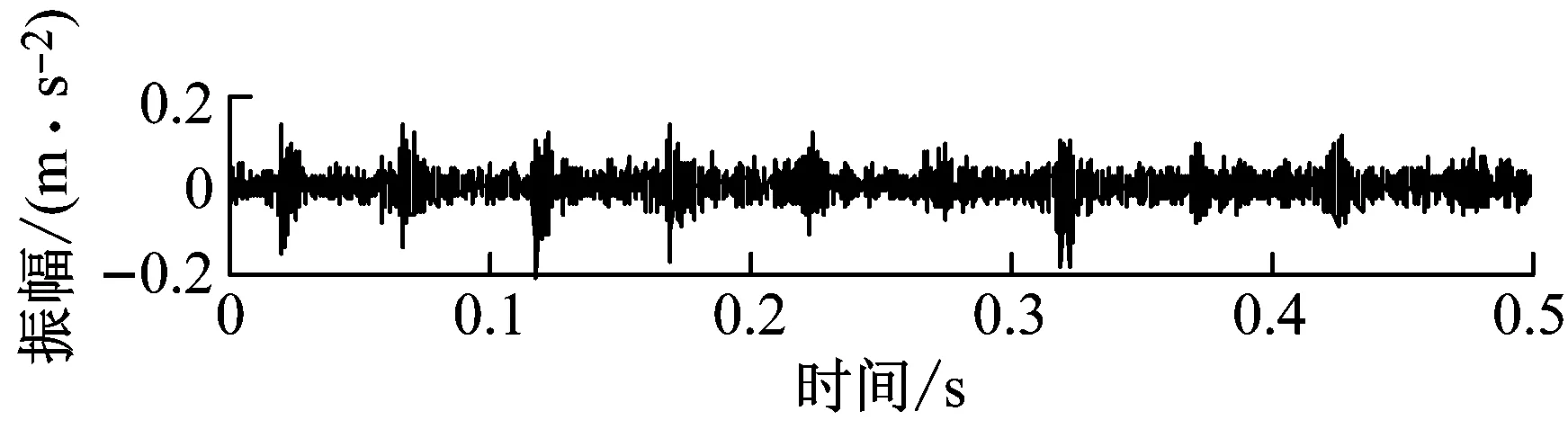
(c) 內(nèi)圈線切割直徑0.5 mm

(d) 外圈點蝕直徑0.5 mm

(e) 外圈線切割直徑0.5 mm圖6 滾動軸承振動信號時域圖Fig.6 Rolling bearing vibration signal time domain diagram
4.1 BFA-DBN逐層特征分析與結(jié)果比較
深度學(xué)習(xí)能通過多層網(wǎng)絡(luò)結(jié)構(gòu),直接從原始信號中自動提取故障特征,完成軸承故障診斷。實驗中DBN的參數(shù)由BFA得到,模型結(jié)構(gòu)參數(shù)為500-387-41-5,學(xué)習(xí)率為0.062 9,動量系數(shù)為0.047 8。根據(jù)本文2中的訓(xùn)練過程,BFA-DBN對各節(jié)點的權(quán)值及偏置進(jìn)行無監(jiān)督學(xué)習(xí),生成DBN故障診斷分類器。各種測試樣本經(jīng)BFA-DBN逐層特征提取情況,如圖7所示。
由圖7可知,五種樣本的原始輸入向量特征信息雜亂無章,經(jīng)第一隱層映射后,輸入向量維度由500降到378,且大部分節(jié)點激活值為0。經(jīng)第二隱層映射后,輸入向量維度減至41,特征信息進(jìn)一步集中到激活值較大的節(jié)點處。經(jīng)第三次映射后,輸入向量在輸出層成功激活相應(yīng)類別節(jié)點(正常軸承1號節(jié)點,內(nèi)圈點蝕故障2號節(jié)點,內(nèi)圈線切割故障3號節(jié)點,外圈點蝕故障4號節(jié)點,外圈線切割故障5號節(jié)點),完成軸承故障診斷。

(a) 正常軸承

(b) 內(nèi)圈點蝕直徑0.5 mm

(c) 內(nèi)圈線切割直徑0.5 mm

(d) 外圈點蝕直徑0.5 mm

(e) 外圈線切割直徑0.5 mm圖7 測試樣本特征提取散點圖Fig.7 Feature extraction scatter plot of test samples
為驗證本文所提方法(DBN-BFA)的有效性,與傳統(tǒng)的特征提取和模式識別(SVM、KNN、BPNN)方法做比較。從振動信號中提取常用的軸承診斷特征:脈沖因子、峭度因子、峰值因子、波形因子、峭度、均方根、峰-峰值、平均值、方差、方差、標(biāo)準(zhǔn)差、裕度因子、最大值、最小值(14-features)、本征模函數(shù)能量熵(imf)。其中,支持向量機(jī)(SVM)采用徑向核函數(shù),懲罰因子及核參數(shù)由遺傳算法得到;最鄰近距離分類器(KNN)采用歐式距離作為判別標(biāo)準(zhǔn);單層人工神經(jīng)網(wǎng)絡(luò)(BPNN)的結(jié)構(gòu)為14-8-5;多層人工神經(jīng)網(wǎng)絡(luò)(BPNN)的結(jié)構(gòu)為14-8-6-5。實驗重復(fù)10次,各種方法對測試集進(jìn)行分類識別,結(jié)果如圖8所示。
由圖8可知,本文所提方法(BFA-DBN)對滾動軸承故障診斷的平均準(zhǔn)確率達(dá)到97.83%,10次實驗的標(biāo)準(zhǔn)差為1.57%,表現(xiàn)出良好的穩(wěn)定性和泛化能力。傳統(tǒng)的故障診斷方法SVM-imf、KNN-14-feature對滾動軸承故障診斷的平均準(zhǔn)確率分別為71.33%和78.67%。而單隱層和多隱層的人工神經(jīng)網(wǎng)絡(luò)(BPNN-feature-14)對信號的分類準(zhǔn)確率僅為40%左右。傳統(tǒng)的模式識別方法主要基于“淺層學(xué)習(xí)”,需要對振動信號做特征提取以降低樣本維度。對于不同損傷程度的振動信號,傳統(tǒng)的信號處理或特征提取方法的自適應(yīng)能力不強(qiáng),故障特征信息提取不完整,從而影響故障診斷的準(zhǔn)確率。其中,多隱層的BPNN也采用了深層結(jié)構(gòu),但由于BPNN的多隱層結(jié)構(gòu)不具備無監(jiān)督學(xué)習(xí)能力,依靠BP算法對模型進(jìn)行訓(xùn)練,模型的誤差可能收斂,也可能陷入局部極值,使得分類準(zhǔn)確率波動較大。

圖8 10次實驗中各方法的分類準(zhǔn)確率Fig.8 The identify results of 10 times experiments
4.2 BFA優(yōu)化過程及分析
為驗證BFA的性能,用逐層優(yōu)化算法(Layer-by-layer Optimization Algorithm, LOA)和粒子群優(yōu)化算法(Particle Swarm Optimization Algorithm, PSO)進(jìn)行對比實驗。設(shè)DBN學(xué)習(xí)率、動量系數(shù)的解析空間為[0, 0.1],隱節(jié)點數(shù)的解析空間為[5,500],DBN訓(xùn)練誤差閾值為0.05。BFA-DBN的細(xì)菌種群數(shù)為20,趨向、復(fù)制、遷徙的操作數(shù)為5,遷徙概率為0.1。逐層優(yōu)化算法(LOA-DBN)中,隱節(jié)點數(shù)的優(yōu)化步長為5。粒子群優(yōu)化算法(PSO-DBN)的種群數(shù)量為20,迭代次數(shù)為50,學(xué)習(xí)因子為2,慣性權(quán)重為0.8。DBN各隱層的節(jié)點數(shù)、學(xué)習(xí)率、動量,由BFA、LOA、PSO分別進(jìn)行優(yōu)化得到,結(jié)果如表1所示。

表1 各種算法對DBN模型優(yōu)化的結(jié)果Tab.1 The structures of DBN based on the optimization algorithms
由表1可知,本文所提方法(BFA-DBN)經(jīng)過7次種群迭代(每次迭代計算20個細(xì)菌的適應(yīng)度),共用時246.759 s完成DBN的優(yōu)化,故障診斷準(zhǔn)確率為97.83%。LOA-DBN通過步長和多層嵌套循環(huán)來優(yōu)化模型結(jié)構(gòu),經(jīng)過238次迭代,用時549.562 s,分類準(zhǔn)確率為95.25%。PSO-DBN用20個種群經(jīng)過9次迭代,用時328.468 s,得到模型分類準(zhǔn)確率為96.28%。BFA、LOA、PSO都是通過搜索,對模型進(jìn)行優(yōu)化。但LOA主要依靠步長,在空間內(nèi)對各個解逐步計算以尋找最優(yōu)值,因此用時較長、精度較低。PSO通過比較局部極值和全局極值進(jìn)行并行搜索,但種群代數(shù)達(dá)到一定值時,分類準(zhǔn)確率不再提高,從而陷入局部極值。BFA是仿生物學(xué)的智能算法,通過并行計算和遷徙操作,不僅能跳出局部極值,還會逐漸向最優(yōu)值靠近。圖9是BFA對隱節(jié)點數(shù)優(yōu)化過程中,部分迭代狀態(tài)下的細(xì)菌種群分布情況。

(a) 初始種群分布

(b) 第5代種群分布

(c) 第7代種群分布圖9 BFA優(yōu)化過程中細(xì)菌種群分布Fig.9 The distribution of bacteria in the BFA optimization process
如圖9所示,細(xì)菌個體在搜索過程中獲得與解有關(guān)的信息,通過復(fù)制、趨向操作細(xì)菌種群逐漸向最優(yōu)解區(qū)域聚集。同時,BFA按指定概率執(zhí)行遷徙操作,當(dāng)問題的解空間存在多個極值點時,符合遷徙條件的細(xì)菌被隨機(jī)分配到解析空間中,用新的個體來代替原有的個體,避免種群陷入局部極值。實驗中,BFA初始種群在解析空間內(nèi)隨機(jī)分布,隨著種群的迭代,細(xì)菌逐步向最優(yōu)解靠近,經(jīng)過7次種群迭代,找到模型的最優(yōu)解。從細(xì)菌覓食決策算法來看,引入復(fù)制、趨向和遷徙操作可以提高算法的全局搜索能力。因此,DBN-BFA用較少的時間就能完成模型優(yōu)化,提高故障診斷的精度。
5 結(jié) 論
(1) 本文采BFA-DBN直接對滾動軸承原始振動信號進(jìn)故障診斷,簡化了傳統(tǒng)故障診斷中的特征提取過程,避免了模式識別對信號處理、特征提取結(jié)果的依賴。
(2) 采用DBN對樣本數(shù)據(jù)的訓(xùn)練誤差構(gòu)造BFA的適應(yīng)度函數(shù),有效選取DBN的參數(shù),克服了人為經(jīng)驗設(shè)置或反復(fù)實驗的不足。與傳統(tǒng)的優(yōu)化算法相比,細(xì)菌覓食決策算法的并行搜索能力和遷徙操作,能減少搜索時間,提高故障診斷的精度。
(3) 由于時間關(guān)系,本文僅對滾動軸承不同故障類型及損傷情況做分類識別,對滾動軸承早期微弱故障的診斷還有待研究。
[1] 郭亮, 高宏力, 張一文, 等. 基于深度學(xué)習(xí)理論的軸承狀態(tài)識別研究[J]. 振動與沖擊, 2016, 35(12): 166-170.
GUO Liang, GAO Hongli, ZHANG Yiwen, et al. Research on bearing condition monitoring based on deep learning[J]. Jouranl of Vibaration and Shock, 2016, 35(12): 166-170.
[2] EL-THALJI I, JANTUNEN E. A summary of fault modelling and predictive health monitoring of rolling element bearings[J]. Mechanical Systems and Signal Processing, 2015, 60: 252-272.
[3] BIN G F, GAO J J, LI X J, et al. Early fault diagnosis of rotating machinery based on wavelet packets—empirical mode decomposition feature extraction and neural network[J]. Mechanical Systems and Signal Processing, 2012, 27: 696-711.
[4] 王國彪, 何正嘉, 陳雪峰, 等. 機(jī)械故障診斷基礎(chǔ)研究 “何去何從”[J]. 機(jī)械工程學(xué)報, 2013, 49(1): 63-72.
WANG Guobiao, HE Zhengjia, CHEN Xuefeng, et al. Basic research on machinery fault diagnosis-What is the prescription[J]. Journal of Mechanical Engineering, 2013, 49(1): 63-72.
[5] 文成林,呂菲亞,包哲靜,等.基于數(shù)據(jù)驅(qū)動的微小故障診斷方法綜述[J].自動化學(xué)報,2016, 42(9):1285-1299.
WEN Chenglin, Lü Feiya, BAO Zhejing, et al. A review of data driven-based incipient fault diagnosis[J]. Acta Automatica Sinica, 2016, 42(9): 1285-1299
[6] 雷亞國, 賈峰, 周昕, 等. 基于深度學(xué)習(xí)理論的機(jī)械裝備大數(shù)據(jù)健康監(jiān)測方法[J]. 機(jī)械工程學(xué)報, 2015, 51(21):49-56.
LEI Yaguo, JIA Feng, ZHOU Xin, et al. A deep learning-based method for machinery health monitoring with big data[J]. Journal of Mechanical Engineering, 2015, 51(21): 49-56.
[7] SCHMIDHUBER J. Deep learning in neural networks: An overview[J]. Neural Networks, 2015, 61(9): 85-117.
[8] HINTON G, OSINDERO S, TEH Y W. A fast learning algorithm for deep belief nets[J]. Neural Computation, 2006, 18(7): 1527-1554.
[9] ERHAN D, BENGIO Y, COURVILLE A. Why does unsupervised pre-training help deep learning[J]. Journal of Machine Learning Research, 2010,11(3): 625-660.
[10] HINTON G, SALAKHUTDINOV R. Reducion the dimensionality of data with neural networks[J]. Science, 2006, 313: 504-507.
[11] TRAN V T, ALTHOBIANI F, BALL A. An approach to fault diagnosis of reciprocating compressor valves using Teager-Kaeser energy operator and deep belief networks[J]. Expert Systems with Application, 2014, 41(9): 4113-4122.
[12] TAMILSELVAN P, YIBIN W, PINGFENG W. Deep belief network based state classification for structural health diagnosis[J]. Reliability Engineering and System Safety, 2013, 115(3): 124-135.
[13] SUN J, WYSS R, STEINECKER A, et al. Automated fault detection using deep belief networks for the quality inspection of electromotors[J]. tm-Technisches Messen, 2014, 81(5): 255-263.
[14] GAN M, WANG C, ZHU C. Construction of hierarchical diagnosis network based on deep learning and its application in the fault pattern recognition of rolling element bearings[J]. Mechanical Systems and Signal Processing, 2016, 72: 92-104.
[15] 單外平, 曾雪瓊. 基于深度信念網(wǎng)絡(luò)的信號重構(gòu)與軸承故障識別[J].電子設(shè)計工程,2016,24(4):67-71.
SHAN Waiping, ZENG Xueqiong. Signal reconstruction and bearing fault identification based on deep belief network[J]. Electronic Design Engineering,2016,24(4):67-71.
[16] SHAO H, JIANG H, ZHANG X, et al. Rolling bearing fault diagnosis using an optimization deep belief network[J]. Measurement Science & Technology, 2015, 26(11): 115002.
[17] PASSINO K M. Biomimicry of bacterial foraging for distributed optimization and control[J].IEEE Control Systems Magazine,2002,22:52-67.
[18] 楊大煉, 劉義倫, 李學(xué)軍, 等. 基于細(xì)菌覓食優(yōu)化決策的齒輪箱故障診斷[J]. 中南大學(xué)學(xué)報(自然科學(xué)版), 2015, 46(4): 1224-1229.
YANG Dalian, LIU Yilun, LI Xuejun, et al. Gearbox fault diagnosis based on bacterial foraging algorithm optimization decisions[J]. Journal of Central South University (Science and Technology), 2015, 46(4): 1224-1229.
[19] 胡潔. 細(xì)菌覓食優(yōu)化算法的改進(jìn)及應(yīng)用研究[D]. 武漢: 武漢理工大學(xué), 2012.
[20] 周雅蘭. 細(xì)菌覓食優(yōu)化算法的研究與應(yīng)用[J]. 計算機(jī)工程與應(yīng)用, 2010, 46(20):16-21.
ZHOU Yalan. Research and application on bacteria foraging optimization algorithm[J]. Computer Engineering and Applications, 2010, 46(20):16-21.
Rollingbearingfaultdiagnosisbasedonbacterialforagingalgorithmanddeepbeliefnetwork
TAO Jie1,2, LIU Yilun1,3, YANG Dalian1,4, BIN Guangfu4
(1.College of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;2. Lab of Knowledge Processing and Networked Manufacturing, Hunan University of Science and Technology, Xiangtan 411201, China;3. Light Alloy Research Institute, Central South University, Changsha 410083, China; 4. Hunan Provincial Key Lab of Health Maintenance for Mechanical Equipment, Hunan University of Science and Technology, Xiangtan 411201, China)
When studying rolling bearing fault diagnosis with the deep belief network method, parameters in the deep belief network have a great effect on fault diagnosis results and it is hard to obtain suitable parameters. Here, the fault diagnosis method based on the bacterial foraging algorithm and the deep belief network was proposed to improve the correct rate of bearing fault diagnosis. The parallel search ability of the bacterial foraging algorithm was adopted to effectively choose the number of hidden layer, the number of hidden nodes, the learning rate in a deep belief network. The deep belief network’s training data classification error was used to calculate the fitness function of the bacterial foraging algorithm to build an appropriate fault classifier and finish rolling bearing fault diagnosis. The test results showed that the correct rate of the proposed method for rolling bearing fault diagnosis reaches 98.5%; compared with BPNN, SVM and KNN methods, the proposed method can more stably and more accurately identify rolling bearing faults.
deep belief network; bacterial foraging algorithm; rolling bearings; fault diagnosis
國家自然科學(xué)基金(51575176;11702091);湖南科技大學(xué)機(jī)械設(shè)備健康維護(hù)湖南省重點實驗室開發(fā)(201605)
2016-11-14 修改稿收到日期:2017-03-13
陶潔 女,博士生,講師,1980年12月生
劉義倫 男,教授,博士生導(dǎo)師,1955年10月生
TAH133.33
A
10.13465/j.cnki.jvs.2017.23.011
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
