鴨式旋翼/機翼飛機懸停狀態飛行動力學特性
2017-12-20 11:02:26高紅崗高正紅鄧陽平曹煜
航空學報 2017年11期
高紅崗,高正紅,鄧陽平,曹煜
西北工業大學 航空學院,西安 710072
鴨式旋翼/機翼飛機懸停狀態飛行動力學特性
高紅崗,高正紅*,鄧陽平,曹煜
西北工業大學 航空學院,西安 710072
針對鴨式旋翼/機翼(Canard Rotor/Wing,CRW)飛機獨特的氣動布局,常規的分析方法及經驗公式很難準確地對CRW飛機進行飛行動力學研究,通過飛行辨識對CRW飛機懸停狀態特性進行了研究。首先,設計了飛行試驗并獲得了高質量的飛行數據,基于頻率響應對CRW飛機的狀態空間模型進行了簡化。然后,在頻域內對飛機的動力學參數進行了擬合優化,獲得了CRW飛機懸停狀態的動力學模型,并用飛行數據對所建模型進行了驗證。最后,用辨識所得參數與常規直升機懸停狀態時的參數進行了對比。結果顯示懸停時CRW飛機的操縱導數和阻尼導數均比常規直升機小,經分析,操縱導數的減小主要是CRW飛機獨特的旋翼設計所致,阻尼導數減小的原因主要是旋翼氣動影響以及鴨翼、平尾、垂尾的結構影響。動力學特性分析結果為CRW飛機旋翼模式總體設計的進一步優化提供了指引和參考,所建立的模型可用于控制系統設計。
鴨式旋翼/機翼(CRW);直升機;動力學特性;懸停;飛行辨識
鴨式旋翼/機翼(Canard Rotor/Wing,CRW)飛機是一種新型可垂直起降、高速巡航的飛行器,其最大特征就是有一副既可以高速旋轉作為旋翼,又可以鎖定作為固定翼的主機翼,在軍民用航空領域擁有十分廣泛的應用前景。
波音公司在20世紀90年代初提出CRW飛機概念并于1998年與美國國防預研局簽訂合同,進行CRW飛機設計方案的論證和飛行試驗,實現了翼尖噴氣旋轉機翼的驅動與控制,2004年完成旋翼垂直起降飛行,前飛時失控飛機墜毀,未完成飛行模式轉換飛行試驗。國外針對CRW飛機開展了較多研究,Bass等[1]以1∶5縮比模型進行風洞試驗,研究了CRW飛機以低速旋翼模式以及固定翼飛行時的空氣動力學特性,Crossley和Bass[2]結合空氣動力學分析程序和結構設計程序來提高葉片結構設計的精度,Osder[3]設計了CRW飛機的導航、制導和控制系統等。國內在CRW飛機方面起步較晚,但是目前已經作了大量的基礎研究,孫威等[4-5]對橢圓對稱旋翼的氣動特性進行了研究,鄧陽平[6]和何澳[7]等對旋翼與機翼的氣動干擾進行了研究,史振興和高正紅[8]對轉換時旋翼卸載特性進行了研究,李毅波等[9]對轉換末段的氣動特性進行了研究。但對CRW飛機飛行動力學特性的研究并不多,目前只有少數CRW飛機機理建模[10-11]和配平研究[11-12]。
飛機飛行動力學模型可以用來評估飛機總體設計的結果是否滿足預期指標,同時也可以根據飛行動力學模型分析的結果指引飛機的總體及飛控系統設計。飛機的飛行控制系統的設計需要可信度較高的模型,尤其一些基于模型的先進控制方法,對飛機飛行動力學模型的要求更高。所以飛機飛行動力學特性研究對飛機總體設計和飛行控制系統設計都很重要。
CRW飛機旋翼飛行模式主要完成垂直起降、懸停與低速飛行,其中,懸停是反映旋翼效率的重要飛行模式。因此,本文主要研究CRW飛機(見圖1)懸停狀態的飛行動力學特性。
與傳統直升機不同,CRW飛機為了兼顧旋翼和固定翼模式的飛行,旋翼設計采用前后緣對稱的橢圓翼型,并且旋翼具有小展弦比、小槳盤面積的特點,同時為了補充在旋翼飛行與固定翼飛行兩種模式轉換時需要的升力,采用帶鴨翼的三翼面布局,以及通過增加鴨翼和平尾的面積來提供附加升力和保持縱向飛行穩定[11]。由于采用了非常規的氣動布局,單純通過工程分析與一定的風洞試驗數據建模,難以準確表達CRW飛機的飛行動力學特性。相比之下,飛行試驗辨識建模可以充分反映各種氣動干擾的影響,能建立精度較高的飛行動力學模型。由于頻域辨識方法可以消除與輸入或者輸出不相干噪聲的影響,參數擬合時可以選取線性相關度較高的頻段進行擬合[13]等,因而本文通過模型飛機飛行試驗,并采用頻域辨識的方法來獲取CRW飛機懸停狀態的飛行動力學模型。
在前期試驗中發現CRW飛機懸停及小速度飛行時縱橫向穩定性不足,所以本文首先設計了CRW飛機旋翼模式的增穩控制系統。在此基礎上設計了掃頻飛行試驗。通過辨識獲得CRW飛機懸停狀態的動力學模型,并與常規直升機(見圖2)懸停狀態的動力學模型進行對比(圖1與圖2中的槳轂、動力與傳動系統均相同),期望揭示CRW飛機旋翼模式與同量級的常規直升機動力學特性的差別,為CRW飛機旋翼模式的總體設計提供指引。

圖1 自研的CRW飛機Fig.1 Our CRW aircraft

圖2 常規直升機Fig.2 Conventional helicopter
1 CRW飛機本體懸停狀態動力學模型
本文研究的CRW飛機采用電機驅動旋翼,為了平衡主旋翼的反扭矩在飛機尾部設計了尾槳系統。CRW飛機的主要設計參數如表1所示。
假設CRW飛機為剛體,利用小擾動線化理論,對CRW飛機的六自由度運動方程線化后可得狀態空間模型[14-17]為

Y=CX
(1)
式中:X=[uvwθφψqpr]T為狀態變量,u、v、w分別為飛行速度在體軸系x、y、z軸上的分量,θ、φ、ψ分別為俯仰角、滾轉角、偏航角,q、p、r分別為俯仰角速度、滾轉角速度、偏航角速度;U=[δlonδlatδpedδcol]T為操縱變量,δlon、δlat、δped、δcol分別為縱向周期變距、橫向周期變距、尾槳槳距、總距;Y=[axayazθφψqpr]T為輸出變量,ax、ay、az分別為體軸系3個方向的線加速度;A為氣動導數矩陣;B為操縱導數矩陣;C為輸出矩陣。A、B、C的表達式為

表1 CRW飛機主要設計參數Table 1 Main design parameters of CRW aircraft
A=

式中:X、Y、Z和L、M、N分別為體軸系3個方向上的力和力矩;Xu為變量X對u的導數,其他變量的含義與之類似;A(1,:)、A(2,:)、A(3,:)分別為矩陣A的第1、2、3行。
2 CRW飛機旋翼模式增穩控制系統設計
在缺乏準確的飛行動力學模型的前提下,本文設計了利用模型飛行試驗,進行飛行控制設計的方法。首先針對CRW飛機在懸停飛行試驗中穩定性較差的問題,分別在俯仰、滾轉、航向3個通道增加了阻尼器。試驗結果表明,飛機的穩定性得到了一定的改善,但操縱手操縱起來依然很吃力,為了進一步改善飛機的穩定性,又增加了俯仰通道與滾轉通道的姿態自動控制系統,如圖3所示,并通過飛行試驗,對控制參數進行了調整優化。經過試飛測試,在該增穩控制系統的作用下,操縱手可以輕松控制CRW飛機以旋翼模式進行飛行,這為之后在CRW飛機旋翼模式下進行各種試驗提供了平臺。
圖3中,各通道輸入信號為遙控器桿量,k1、k2、k3為遙控器桿量與姿態指令的映射系數,文中所用futaba遙控器發射的桿量信號為PWM(Pulse Width Modulation)信號,操縱桿最大行程對應的操縱量為±0.5 ms,文中設定遙控器桿量最大行程所對應的俯仰角和滾轉角的指令為±90°、航向角速度的指令為±180 (°)/s,所以:k1=k2=90/0.5=180 (°)/ms,k3=180/0.5=360 (°)/(s·ms)。k4,k5,…,k9為阻尼器和姿態控制器的參數,參數值是通過試飛調試確定的。

圖3 CRW飛機旋翼模式增穩控制系統Fig.3 Stability augmentation control system of CRW aircraft rotor mode
3 飛行試驗設計
為了通過飛行試驗獲得CRW飛機本體的飛行動力學模型,首先對飛行試驗進行設計,提出能夠反映CRW飛機動力學特性的操縱輸入,以及設計獲取CRW飛機本體操縱輸入和響應的數據采集方案。
3.1 操縱輸入信號設計
掃頻信號能夠提供均勻的功率譜激勵[13],所以頻域辨識一般用掃頻信號作為操縱輸入。用于系統辨識的操縱輸入需要能夠激勵出系統所有感興趣的模態。同時設計激勵信號時還需考慮飛行試驗的安全性,操縱信號頻率太高可能激勵出結構模態等不希望出現的模態,所以設計的輸入信號能充分激勵感興趣的所有模態即可,其頻率范圍在試驗時應該被嚴格控制。圖4為典型的掃頻輸入信號。設計輸入信號的關鍵是確定所需操縱信號的最小頻率ωmin和最大頻率ωmax。因為直升機短周期模態的頻率是本體模態里頻率最高的,所以只要知道了短周期模態的大致頻率也就能夠確定操縱輸入需要的最大頻率。文中在正式飛行辨識之前,對飛機進行了試探性飛行試驗,初始選取較小的頻率范圍進行掃頻飛行,然后求得系統的半對數頻率響應,看幅值曲線里有沒有出現斜率變化為-40 dB/dec (dec表示十倍頻)的轉折頻率,若沒有則繼續擴大操縱輸入的頻率范圍進行試驗,直到系統的幅值曲線里出現斜率變化為-40 dB/dec的轉折頻率,此時轉折頻率即為短周期模態的初始估計值,如圖5所示,初步估計出短周期模態的頻率為8 rad/s。理論上只要操縱輸入的最大頻率大于短周期模態頻率即可,考慮到實際飛行中外界的干擾,文中掃頻信號最大頻率ωmax取短周期模態頻率的1.5倍,即12 rad/s。操縱輸入最小頻率ωmin參照文獻[13]取0.6 rad/s,所以取CRW飛機掃頻輸入頻率范圍為0.1~2 Hz。
掃頻時應該從低頻到高頻逐漸過渡,其中掃頻起始處應該有2個完整的長周期輸入,對應最小頻率的最大周期Tmax=2π/ωmin,掃頻數據記錄總長度Trec根據經驗公式[13],滿足Trec≥(4~5)Tmax。
需要注意的是,對某個通道進行掃頻試驗時,需要對其他通道給出必要的控制輸入,以使其他通道處于配平狀態。

圖4 典型的掃頻輸入信號Fig.4 Typical frequency sweep input signal

圖5 轉折頻率的估計Fig.5 Estimation of turning frequency
3.2 試驗數據的采集
本文是用閉環飛行試驗來辨識開環本體的模型,在飛行試驗過程中,飛機的響應可以直接測量獲得,飛機本體的槳距無法直接測量,但可以測得回路內執行機構舵機的輸入信號(見圖6)。為此首先需要通過地面試驗,建立舵機輸入信號和旋翼的周期變距以及總距變化的對應關系,然后對飛行試驗中測量到的舵機輸入信號根據映射關系獲得周期變距及總距等CRW飛機的本體輸入。圖6為俯仰通道飛行試驗和地面試驗數據測量結構圖,其他通道的測量與之類似。
圖6中,俯仰通道飛行試驗時測量的輸入輸出數據分別為舵機的輸入信號δPWMlon和飛機的響應θ、q、ax。地面試驗時測量的信號為δPWMlon和δlon。
試驗所用舵機的帶寬為30 rad/s的量級,遠高于CRW模型飛機的帶寬(約為7 rad/s), 在辨識模型中可以忽略舵機的動態特性影響。因此,飛行試驗數據中提取CRW飛機本體的操縱輸入時,只考慮其靜態特性。地面試驗測試了舵機和自動傾斜器的靜態傳遞系數。俯仰通道的舵機輸入信號與縱向周期變距之間的關系如圖7所示。圖中試驗結果表明,俯仰通道舵機輸入與縱向周期變距呈線性關系,通過擬合后可得舵機和自動傾斜器的靜態傳遞系數為δlon/δPWMlon=15.78 (°)/ms,根據飛行試驗時測量到的俯仰通道舵機的輸入乘以所求的傳遞系數即可獲得CRW飛機旋翼模式的縱向周期變距,應用同樣的方法可獲得橫向周期變距、總距和尾槳槳距。這樣就獲得了辨識CRW飛機本體所需要的輸入信號,輸出信號可以直接測量獲得。

圖6 俯仰通道飛行試驗和地面試驗數據測量結構圖Fig.6 Data measurement structure diagram of flight test and ground test of pitch channel

圖7 俯仰通道舵機輸入與縱向周期變距的關系Fig.7 Relationship between steering gear input and longitudinal cyclic pitch in pitch channel
4 CRW飛機本體懸停狀態動力學模型辨識
4.1 數據分析與處理
以俯仰通道掃頻試驗為例,掃頻時各通道的輸入信號和飛機響應分別如圖8和圖9所示。從圖8和圖9中可以看出數據未出現漂移等現象,部分數據噪聲較大,對其進行濾波處理。并對數據進行相容性檢驗,由于在掃頻飛行試驗中飛機的運動滿足配平狀態下的小擾動假設條件,所以姿態測量值可通過以下表達式進行相容性檢驗[16]:

圖8 俯仰通道掃頻時各通道的輸入信號Fig.8 Input signals of each channel in pitch channel frequency sweep test

圖9 俯仰通道掃頻時飛機的響應Fig.9 Aircraft response in pitch channel frequency sweep test

(2)
相容性檢驗時,可對式(2)右邊的角速度測量值進行積分,并與姿態角測量值進行比較,看是否相等。圖9中的q和θ相容性檢驗結果如圖10所示,從圖中可以看出q和θ的相容性較好。對其他通道的掃頻數據進行了同樣的分析處理。
由于本文中線運動測量值只有三軸加速度ax、ay、az,沒有u、v、w等多余的測量,所以ax、ay、az未進行相容性檢驗。

圖10 測量值q積分后與測量值θ對比Fig.10 Contrast of integration of q and θ
4.2 頻率響應
由于CRW飛機旋翼模式各通道間有不同程度的耦合,對任何一個通道進行掃頻飛行試驗時,為了使飛機其他通道參數穩定在參考配平狀態,需要在相關的通道施加一些由駕駛員產生的次要輸入。因此在飛機的響應中,將同時包含主要輸入和次要輸入的影響,需要在辨識中消除混入的次要輸入的影響。為此在辨識時,首先需要通過對頻率響應進行處理,以提取出主要通道的頻率響應。
以航向通道為例,CRW飛機旋翼模式存在航向和垂向的軸間耦合,在進行航向通道掃頻時,垂向通道存在相關的操縱輸入,這就使得部分航向角速度是由垂向操縱引起的,因此在進行辨識之前需要去除垂向輸入對航向通道的影響。忽略縱向和橫向操縱輸入的影響,航向和垂向操縱輸入對偏航角速度的影響如圖11所示。
圖11中,KCF是航向通道與垂向通道的相干系數,δcol,c是與航向輸入相關的垂向輸入,δcol,uc是與航向輸入不相關的垂向輸入,r/δped是航向輸入對偏航角速度的頻率響應,r/δcol是垂向輸入對偏航角速度的頻率響應。根據偏相干分析有
(3)
(4)
式中:Sδpedr和Sδcolr分別為輸入δped和δcol與輸出r的互譜;Sδpedδped和Sδcolδcol分別為航向和垂向輸入的自譜;Sδpedδcol和Sδcolδped為航向和垂向2個輸入之間的互譜。聯立式(3)、式(4)可得

(5)
根據飛行試驗數據,計算相應的功率譜,根據式(5)可以得到去除了垂向輸入干擾的航向通道的頻率響應。同理可得其他通道去除干擾后的頻率響應。

圖11 航向通道輸入和垂向通道輸入對偏航角 速度的影響框圖Fig.11 Schematic of effect of heading channel input and vertical channel input on yaw rate
4.3 參數優化
(6)


(7)

4.4 基于頻率響應的模型簡化
當某個頻率響應對的相干值在所關心的頻率范圍內非常低時,則應將該響應對從式(7)的辨識代價函數中去除,同時去除式(1)中與此頻率響應相關的導數,對模型結構進行簡化。比如圖12給出了縱向輸入δlon到偏航角速度r的頻率響應的相干函數。從圖中可以看到r/δlon的相關性很差,可以認為從δlon到r之間沒有明顯的能量傳遞,因此,狀態空間模型中偏航力矩與縱向輸入和縱向狀態變量相關的導數應該被置0,即矩陣A和B中Nu、Nq、Nδlon均置為0。用同樣的方法對所有頻率響應對的相干函數進行分析,最終簡化后的矩陣A和矩陣B的表達式為

圖12 頻率響應r/δlon的相干函數Fig.12 Coherence function for frequency response r/δlon
A=
5 辨識結果及對比分析
5.1 CRW飛機旋翼模式動力學模型辨識結果
對圖1中自研的CRW飛機進行懸停狀態的掃頻飛行試驗并進行動力學模型辨識。矩陣A中導數Xθ=-gcosθ0cosφ0、Yφ=gcosθ0cosφ0,θ0、φ0為俯仰角、滾轉角的懸停配平值,g為重力加速度。從掃頻飛行試驗懸停時的數據中獲得俯仰角、滾轉角的懸停配平值分別為-3°和5°,則可求得Xθ=-9.75 m/s2、Yφ=9.75 m/s2,辨識時將其設為定值,對其他參數進行優化,并計算了各參數的Cramer-Rao邊界,本文采用Cramer-Rao邊界所占辨識參數值的百分比來表示,即

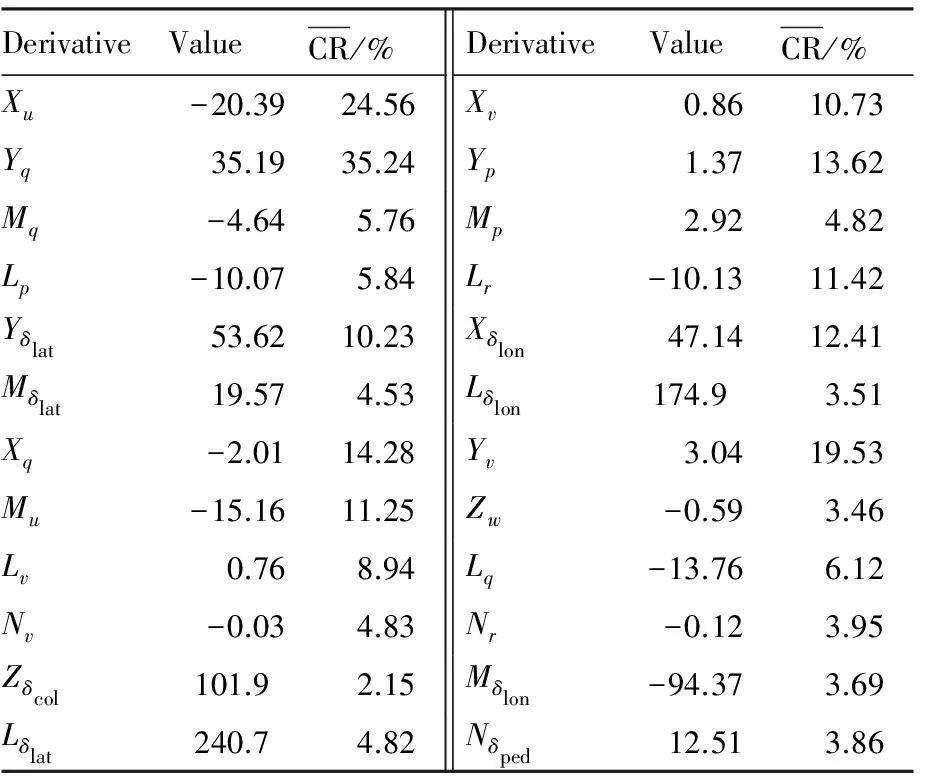
表2 辨識結果Table 2 Identification results
從表2可以看出各參數的Cramer-Rao邊界大多小于20%,說明辨識結果可靠性較高,少數超出Cramer-Rao邊界的參數也予以了保留。
頻率擬合結果如圖13所示,圖13中q/δlon為縱向周期變距到俯仰角速率的頻率響應,p/δlat、r/δped、az/δcol的含義與之類似。從圖13中可以看到,辨識所得模型的頻率響應與飛行試驗的頻率響應匹配較好,說明在所研究的頻率范圍內,辨識所得模型可以很好地表達CRW飛機的頻率特性。
為了驗證辨識所得模型在時域也能很好地表達CRW飛機,利用與辨識時所用不一樣的飛行數據對辨識所得模型進行時域驗證,用實際飛行時的操縱輸入作為模型輸入,解算出模型的預測響應,并與實際飛行響應進行對比,檢驗辨識模型的準確度。圖14給出了三軸角運動和線運動的時域驗證結果,從圖中可以看到角運動吻合得較好,線運動中ax、ay高頻部分模型預測的不是很好,但是大致趨勢一致。總的來說時域驗證結果較好。說明飛行試驗辨識可以獲得精度較高的飛行動力學模型,這與引言中的說法一致。

圖13 主要頻率響應的擬合結果Fig.13 Fitting results of some primary frequency responses
辨識所得的CRW飛機懸停狀態的動力學模型可以用來校驗CRW飛機旋翼模式的設計是否滿足指標要求,同時也可以根據動力學特性的分析結果來指引CRW飛機的總體設計,此外,這也為后續飛行控制系統的設計奠定了基礎。

圖14 時域驗證結果Fig.14 Time domain verification results
5.2 與常規直升機對比分析
對圖2中的常規直升機同樣采用上述方法進行建模,并與自研的CRW飛機在懸停狀態時的主要導數和運動模態進行對比,結果如表3和表4所示。
從表3可以看出懸停時CRW飛機的阻尼導數和操縱導數都比常規直升機小了很多。經分析操縱導數減小的主要原因是CRW飛機的旋翼為橢圓對稱翼型,其氣動效率較常規旋翼低一些所致。阻尼導數減小的主要原因一方面來自旋翼氣動的影響,另一方面來自鴨翼、平尾、垂尾的結構影響,懸停時鴨翼、平尾和垂尾無前向來流,當有小的角速率變化時只能產生很小的氣動阻尼,但較大的鴨翼、平尾和垂尾增大了全機的三軸慣性矩,導致阻尼導數減小。
從表4可以看出懸停狀態時CRW飛機主要運動模態相比常規直升機頻率低了不少,短周期模態的阻尼也較低。CRW飛機旋翼模式的模態與常規直升機對應,沒有出現新的模態。同時也可以看到CRW飛機懸停時有一對正的共軛復根,這也驗證了引言中所說的CRW飛機穩定性不足的結論。

表3 CRW飛機和常規直升機懸停狀態的導數對比

表4 CRW飛機和常規直升機懸停狀態的特征值對比Table 4 Comparison of eigenvalues of CRW aircraft and conventional helicopter in hover
6 結 論
1) 飛行數據與模型預測結果非常接近,證明所建模型可信度較高,文中所建立的模型可用于CRW飛機懸停狀態控制系統的設計。
2) 通過與常規直升機懸停狀態主要導數的對比,發現CRW飛機懸停時的三軸阻尼導數比常規直升機小了很多,這可能導致CRW飛機懸停時的穩定性較常規直升機差,對控制系統的設計提出了更高的要求。同時也為CRW飛機旋翼模式的總體優化設計提供了指引,在固定翼模式允許的范圍內盡可能在設計時增大CRW飛機旋翼模式的阻尼,改善穩定性。
3) 通過與常規直升機懸停狀態的特征值對比,發現CRW飛機懸停時短周期模態的頻率比常規直升機低很多,這會使CRW飛機懸停時受擾后的恢復較慢。同樣這一問題一方面可以通過設計控制系統來改善,另一方面可以在總體設計時進行優化。
本文的研究工作不僅為獲得CRW飛機本體懸停狀態飛行動力學模型提供了思路,而且通過與常規直升機動力學特性的對比分析,加深了對CRW飛機懸停狀態的動力學特性的認識,為后續的研究奠定了基礎。
[1] BASS S M, THOMPSON T L, RUTHERFORD J W, et al. Low-speed wind tunnel test results of the canard rotor/wing concept:AIAA-1993-3412[R]. Reston,VA: AIAA, 1993.
[2] CROSSLEY W A, BASS S M. Using aerodynamic analysis codes to assist in structural design and optimization of ducted rotor/wing blades:AIAA-1992-4280[R]. Reston,VA: AIAA, 1992.
[3] OSDER S S. Integrated navigation, guidance, and control for canard rotor/wing (CRW) aircraft[C]∥13th Digital Avionics Systems Conference. Piscataway, NJ: IEEE Press, 1994: 181-189.
[4] SUN W, GAO Z H, DU Y M, et al. Mechanism of unconventional aerodynamic characteristics of an elliptic airfoil[J]. Chinese Journal of Aeronautics, 2015, 28(3): 687-694.
[5] 孫威,高正紅,黃江濤,等.旋轉機翼懸停氣動特性研究[J].空氣動力學學報,2015,33(2):232-238.
SUN W, GAO Z H,HUANG J T, et al. Aerodynamic characteristics of hovering rotor/wing[J]. Acta Aerodynamica Sinica, 2015, 33(2): 232-238 (in Chinese).
[6] 鄧陽平,高正紅,詹浩.鴨式旋翼/機翼飛機懸停及小速度前飛氣動干擾實驗研究[J].實驗力學, 2009,24(6):563-567.
DENG Y P, GAO Z H, ZHAN H. Experimental investigation on aerodynamic interactions of canard rotor/wing aircraft in hover and low speed forward flight[J]. Journal of Experimental Mechanics, 2009, 24(6): 563-567 (in Chinese).
[7] 何澳,高正紅,鄧陽平,等.旋轉機翼對CRW飛機氣動特性影響的動態試驗研究[J].實驗流體力學,2013,27(3):13-16.
HE A, GAO Z H, DENG Y P, et al. A wind tunnel study on aerodynamic characteristics of CRW plane by the rotor/wing[J]. Journal of Experiments in Fluid Mechanics, 2013, 27(3): 13-16 (in Chinese).
[8] 史振興,高正紅.鴨式旋轉機翼飛機過渡段旋翼卸載特性分析[J].飛行力學,2014,32(4):298-302.
SHI Z X, GAO Z H.Analysis of unloading characteristics of the canard rotary wing airplane blade in transitional process[J]. Flight Dynamics, 2014,32(4):298-302 (in Chinese).
[9] 李毅波,馬東立,牛凌宇.鴨式旋翼/機翼飛行器轉換末段氣動特性[J].北京航空航天大學學報,2011,37(3):311-315.
LI Y B, MA D L, NIU L Y.Aerodynamic characteristic of canard rotor/wing aircraft in conversion[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(3): 311-315 (in Chinese).
[10] 蓋文東,王宏倫,李大偉.鴨式旋翼/機翼無人機飛行動力學建模與分析[J].空氣動力學學報,2012,30(2):244-249.
GAI W D,WANG H L, LI D W. Flight dynamics modeling and analysis of canard rotor/wing UAV[J]. Acta Aerodynamica Sinica, 2012, 30(2): 244-249 (in Chinese).
[11] 梁琨,鄧陽平,高正紅.旋轉機翼飛機旋翼飛行動力學模型及配平[J].飛行力學,2010,28(5):5-8.
LIANG K, DENG Y P, GAO Z H. Model and trimming of rotor-wing plane at rotor-wing flight mode[J]. Flight Dynamics, 2010, 28(5): 5-8 (in Chinese).
[12] 李星,高正紅,劉艷.三翼面CRW飛機縱向最優配平點研究[J]. 飛行力學,2010,28(3):13-16.
LI X, GAO Z H, LIU Y.Longitudinal optimal trimming points research for three-surface CRW aircraft[J]. Flight Dynamics, 2010, 28(3): 13-16 (in Chinese).
[13] REMPLE R K,TISCHLER M B. Aircraft and rotorcraft system identification[M]. Reston,VA:AIAA, 2006.
[14] 王適存.直升機空氣動力學[M].南京: 南京航空學院,1985: 24-28.
WANG S C. Helicopter aerodynamics[M]. Nanjing:Nanjing Aviation College, 1985: 24-28 (in Chinese).
[15] 高正,陳仁良.直升機飛行動力學[M].北京: 科學出版社,2003:43-55, 64-65.
GAO Z, CHEN R L. Helicopter flight dynamics[M]. Beijing: Science Press, 2003: 43-55, 64-65 (in Chinese).
[16] 方振平,陳萬春,張曙光.航空飛行器飛行動力學[M].北京: 北京航空航天大學出版社,2015:174-203.
FANG Z P, CHEN W C, ZHANG S G. Aviation aircraft flight dynamics[M]. Beijing: Beihang University Press, 2015: 174-203 (in Chinese).
[17] 方振平.飛機飛行動力學[M].北京: 北京航空航天大學出版社,2008:64-135.
FANG Z P. Aircraft flight dynamics[M]. Beijing: Beihang University Press, 2008: 64-135 (in Chinese).
[18] TISCHLER M B, LEUNG J G M, DUGAN D C. Frequency-domain identification of XV-15 tilt-rotor aircraft dynamics: AIAA-1983-2695[R]. Reston, VA: AIAA, 1983.
[19] 顧冬雷,高正,孫傳偉.無人直升機控制動態特性的頻域辨識建模方法[J].南京航空航天大學學報,2004,36(6):688-692.
GU D L, GAO Z, SUN C W. Frequency domain identification for unmanned helicopter[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2004, 36(6): 688-692 (in Chinese).
[20] 夏慧,陳慶偉,王冠林,等.無人直升機頻域辨識模型參數攝動分析[J].電光與控制,2012,19(8):54-58.
XIA H, CHEN Q W, WANG G L, et al.Frequency domain identification model’s parameter perturbation analysis for an unmanned rotorcraft[J]. Electronics Optics and Control, 2012, 19(8): 54-58 (in Chinese).
Flightdynamiccharacteristicsofcanardrotor/wingaircraftinhover
GAOHonggang,GAOZhenghong*,DENGYangping,CAOYu
SchoolofAeronautics,NorthwesternPolytechnicalUniversity,Xi’an710072,China
FlighttestidentificationisadoptedinthestudyofflightdynamicsofCanardRotor/Wing(CRW)aircraftbecauseconventionalmethodsandempiricalformulasarenotsuitableforflightdynamicanalysisofCRWaircraftduetoitsuniquelayout.Theflighttestisfirstdesignedandhighqualitydataareobtained.Basedonthefrequencyresponse,thestatepacemodeloftheCRWaircraftissimplified,andthekineticparametersoftheaircraftareoptimizedinthefrequencydomain.AhighconfidencedynamicsmodeloftheCRWaircraftinhoveristhenobtainedandconfirmedbytheflightdata.AcomparisonbetweentheCRWmodelandtheconventionalhelicoptermodelinhovershowsthatthecontrolderivativesandthedampingderivativesoftheCRWaircraftaresmallerthanthoseoftheconventionalhelicopter.Itisfoundthatthedecreaseofthecontrolderivativesismainlyduetotherotoraerodynamiccharacteristics,andthereasonforthedecreaseofdampingderivativesismainlythedesignofcanard,horizontaltailandverticalfin.ThecomparisonresultsprovideguidanceandreferenceforfurtheroptimizationofCRWaircraftrotormodedesign,andthedynamicsmodelcanbeusedtodesignthecontrolsystem.
canardrotor/wing(CRW);helicopter;dynamiccharacteristics;hover;flightidentification
2017-01-17;Revised2017-03-05;Accepted2017-04-30;Publishedonline2017-05-310931
URL:http://hkxb.buaa.edu.cn/CN/html/20171103.html
.E-mailzgao@nwpu.edu.cn
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
10.7527/S1000-6893.2017.121139
V212.4
A
1000-6893(2017)11-121139-12
2017-01-17;退修日期2017-03-05;錄用日期2017-04-30;< class="emphasis_bold">網絡出版時間
時間:2017-05-310931
http://hkxb.buaa.edu.cn/CN/html/20171103.html
.E-mailzgao@nwpu.edu.cn
高紅崗,高正紅,鄧陽平,等.鴨式旋翼/機翼飛機懸停狀態飛行動力學特性J.航空學報,2017,38(11):121139.GAOHG,GAOZH,DENGYP,etal.Flightdynamiccharacteristicsofcanardrotor/wingaircraftinhoverJ.ActaAeronauticaetAstronauticaSinica,2017,38(11):121139.
(責任編輯:鮑亞平,王嬌)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
環球時報(2022-05-30)2022-05-30 15:16:57
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
光學精密工程(2016年6期)2016-11-07 09:07:19
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
