考慮EPS與ESP耦合作用的ECAS系統控制策略?
2017-12-18 11:57:55陳黎卿
汽車工程 2017年11期
陳黎卿,鄭 爽,曹 愷
考慮EPS與ESP耦合作用的ECAS系統控制策略?
陳黎卿,鄭 爽,曹 愷
(安徽農業大學工學院,合肥 230036)
為提升汽車在不同工況下的行駛平順性,提出了一種考慮電動助力轉向系統與汽車電子穩定系統耦合作用的電控空氣懸架(ECAS)控制策略。首先建立基于Matlab/Simulink的10自由度整車模型,分析了ESP和EPS對ECAS平順性的影響規律;接著設計了基于粒子群算法的電控空氣懸架系統PID控制器;最后搭建了基于NI-PXI實時控制器的電控空氣懸架控制器硬件在環試驗平臺。試驗結果表明:在路面附著系數0.7、車速50km/h下的單移線工況下,與無控制時相比,所提出的控制系統使整車側傾角峰值由0.031rad降低到0.021rad,俯仰角峰值降低了16%,質心垂向加速度均方根值也減小了32.91%。
電控空氣懸架;耦合;粒子群優化算法;硬件在環試驗
前言
隨著汽車工業的快速發展,汽車的舒適性能越來越受到人們的關注,電控空氣懸架系統(electronically controlled air suspension,ECAS)由于可調節剛度和阻尼特性,能很好改善汽車的平順性,故在汽車上的使用越來越廣泛。文獻[1]中設計了一種基于滑模控制算法的控制器來調節電控空氣懸架系統的簧上質量質心高度和車身的側傾角和俯仰角。文獻[2]中開發了單個車輪電控空氣懸架系統PID控制器。文獻[3]中提出一種能對氣體質量流量進行自適應調節的電控空氣懸架神經網絡PID控制方法。文獻[4]中建立了針對不同車輛運行狀態的多個局部線性固定模型,并采用自適應控制方法調節最佳阻尼力。文獻[5]中根據空氣彈簧剛度試驗,建立了1/2汽車垂向振動模型,依據天棚控制和地棚控制特點,設計了汽車磁流變減振器半主動空氣懸架綜合控制策略。文獻[6]中基于單神經元自調整增益算法,對ECAS設計了神經網絡PID自適應高度調節控制器。
綜上所述,針對電控空氣懸架系統控制策略研究已經取得了較多的成果,但因為整車電控系統逐漸增加,相互之間的耦合作用對于各自的控制具有一定的影響,如ESP和EPS系統對電控空氣懸架就具有耦合特性[7],因此需要進一步的研究。本文中建立了10自由度整車模型,在此基礎上探討ESP,EPS與ECAS的耦合作用,并開展電控空氣懸架控制策略研究。
1 整車數學模型
1.1 電控空氣懸架系統模型
文中討論的電控空氣懸架主要由膜式空氣彈簧和電磁閥式減振器構成,由文獻[8]可得
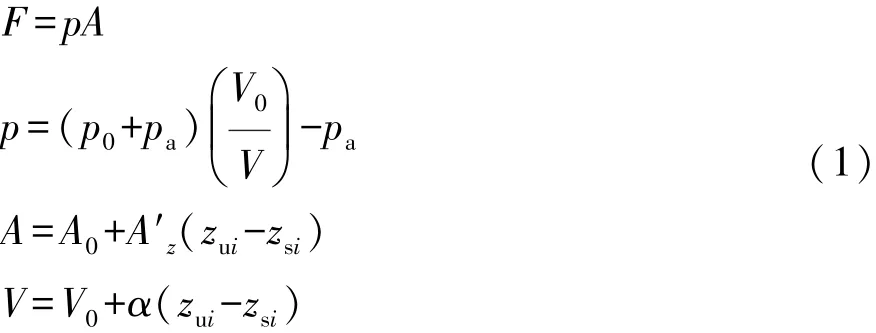
式中:F為空氣彈簧的彈簧力;p為終了狀態氣體壓力;p0為初始狀態氣體壓力;pa為大氣壓力;V為終了狀態空氣彈簧有效容積;V0為初始狀態空氣彈簧有效容積;α為有效容積隨高度的變化率;A為終了狀態空氣彈簧有效面積;A0為初始狀態空氣彈簧有效面積;A′z為有效面積隨高度的變化率;zsi為懸架垂直位移,i=1,2,3,4;zui為非懸架質量垂直位移。
通過臺架試驗,可得電磁閥式減振器阻尼力與控制電流的關系,對不同通電時間下阻尼與控制電流的曲線進行擬合可得

式中:Fc為阻尼力;I為電流;ε1~ε5為擬合系數。
1.2 電動助力轉向系統模型
為便于分析,將前輪和轉向機構轉向軸進行簡化,如圖1所示,轉向系統動力學方程如下[9-10]:
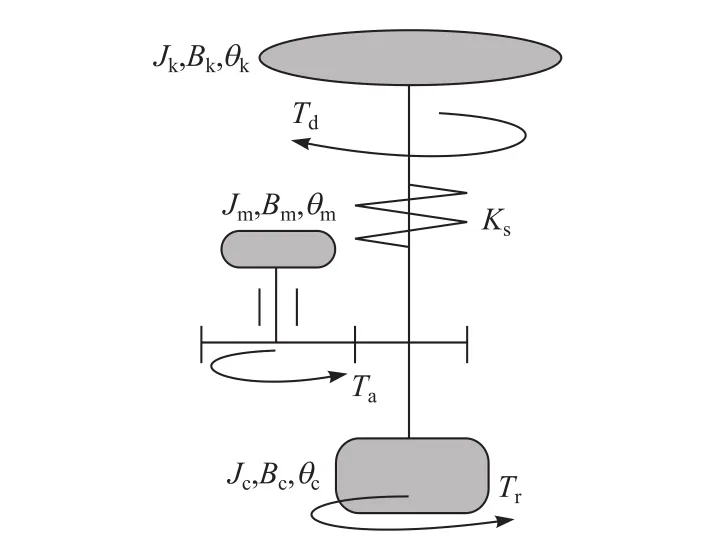
圖1 電動助力轉向系統數學模型

式中:θk為轉向盤轉角;θc為輸出軸轉角;Ks為扭桿剛性系數;Td,Jk和Bk分別為轉向盤轉矩、轉動慣量和阻尼;θm為助力電機轉角;γ為橫擺角速度;β為質心側偏角;δ為前輪轉角;vx為縱向車速;a為前軸到質心的水平距離;Gm為電機到轉向軸的傳動比;Gp為轉向軸到前輪的傳動比;Jc和Bc分別為轉向軸轉動慣量和阻尼系數;Ta為電機助力轉矩;Tr為作用于轉向輪的阻力矩;df為前輪拖距;k1為前輪側偏剛度。
對于直流電機:
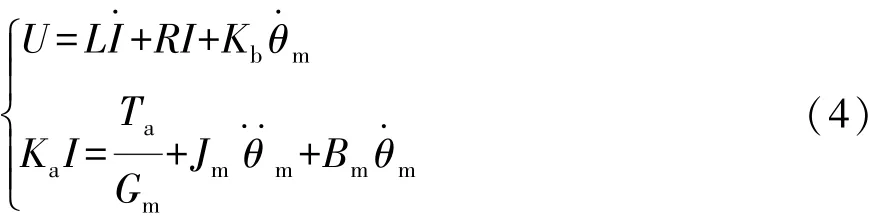
式中:U和I為電機端電壓和電流;L和R為電機電感和電阻;Kb和Ka為電機反電動勢常數和轉矩常數;Jm和Bm為電機轉動慣量和阻尼系數。
1.3 ESP模型
采用線性2自由度車輛模型計算車輛轉向行駛時的理想橫擺角速度和理想質心側偏角:
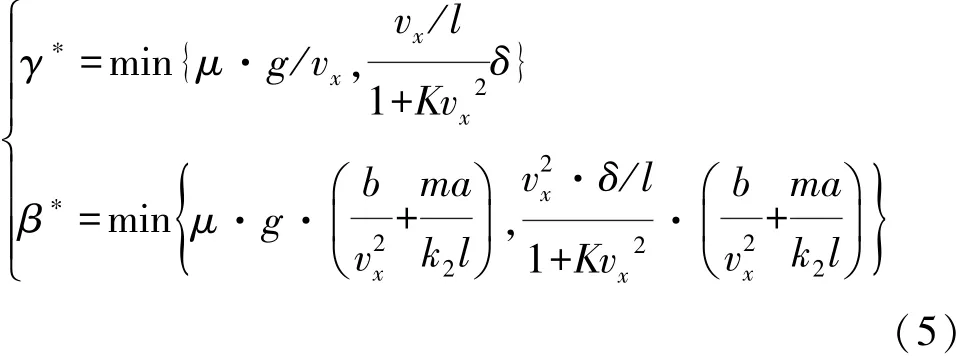
假設在車輪未抱死時,左側車輪需要制動器提供的制動力矩為

其中 ΔM=Izγ?-Izγ
式中:R為輪胎滾動半徑;m為整車質量;δ為前輪轉角;vx為縱向車速;k1和k2為前后輪側偏剛度;b為后軸到質心的水平距離;K為穩定性因數;g為重力加速度;d為1/2輪距;Iz為車輛橫擺轉動慣量;μ為路面最大附著系數;l為軸距;Fzi為輪胎垂直載荷(i=1,2,3,4)。
同理可得右側前后輪制動力和所需制動力矩。
1.4 整車系統模型
建立包括車體的縱向、側向、垂直、橫擺、側傾和俯仰6個自由度和4個車輪的垂直振動自由度的10自由度非線性動力學模型,如圖2所示。
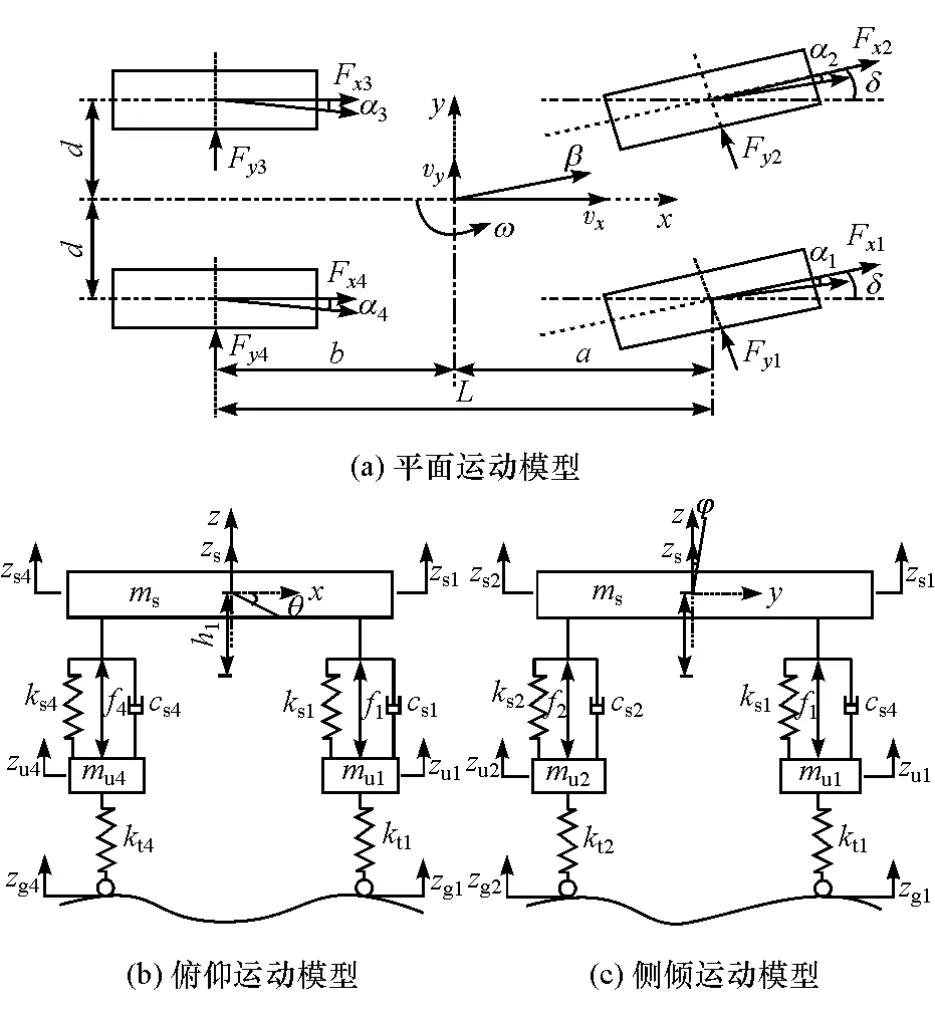
圖2 整車運動模型
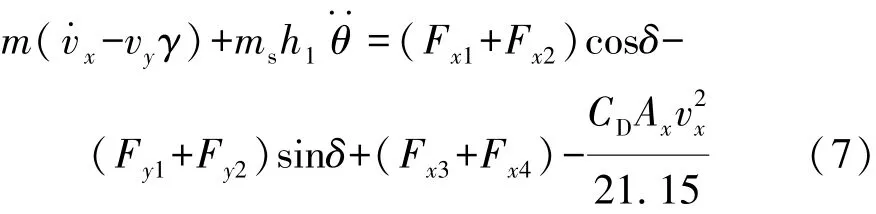
縱向運動:
側向運動:

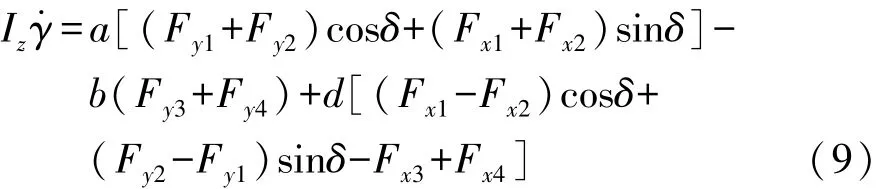
橫擺運動:
側傾運動:

俯仰運動:

車身垂向運動:

車輪垂向運動:

式中:Fui為輪胎垂直作用力;Fsi為懸架作用力;Fai為4個車輪的附加垂直載荷。

式中:ms為懸掛質量;mui為非懸掛質量(輪 i處);δ為前輪轉角;h和h1為簧上質量質心與側傾中心和俯仰中心的高度差;φ和θ為車身俯仰角和側傾角;vy為側向車速;CD為空氣阻力系數;Ax為迎風面積;γ為橫擺角速度;Ix和Iy為車身側傾和俯仰的轉動慣量;zs為汽車質心垂向位移;zg為路面垂向位移輸入;csi為懸架阻尼;kti為輪胎剛度;Fxi和 Fyi為汽車車輪所受縱向側向力(i=1,2,3,4)。
綜合以上公式,采用Matlab/Simulink軟件構建10自由度汽車動力學模型,如圖3所示。

圖3 整車動力學仿真模型
2 EPS和ESP對ECAS性能影響分析
EPS和ESP系統起作用時會引起車身垂直載荷的偏移,進而影響ECAS系統對整車的控制。為清晰觀察其對懸架性能和整車狀態的影響,進行如下工況仿真。
(1)轉向工況,B級路面,車速為15m/s,設置了波峰分別為10,20和30N.m、波寬為0.6s的轉向盤轉矩三角波輸入,進行對比仿真,結果如圖4所示。
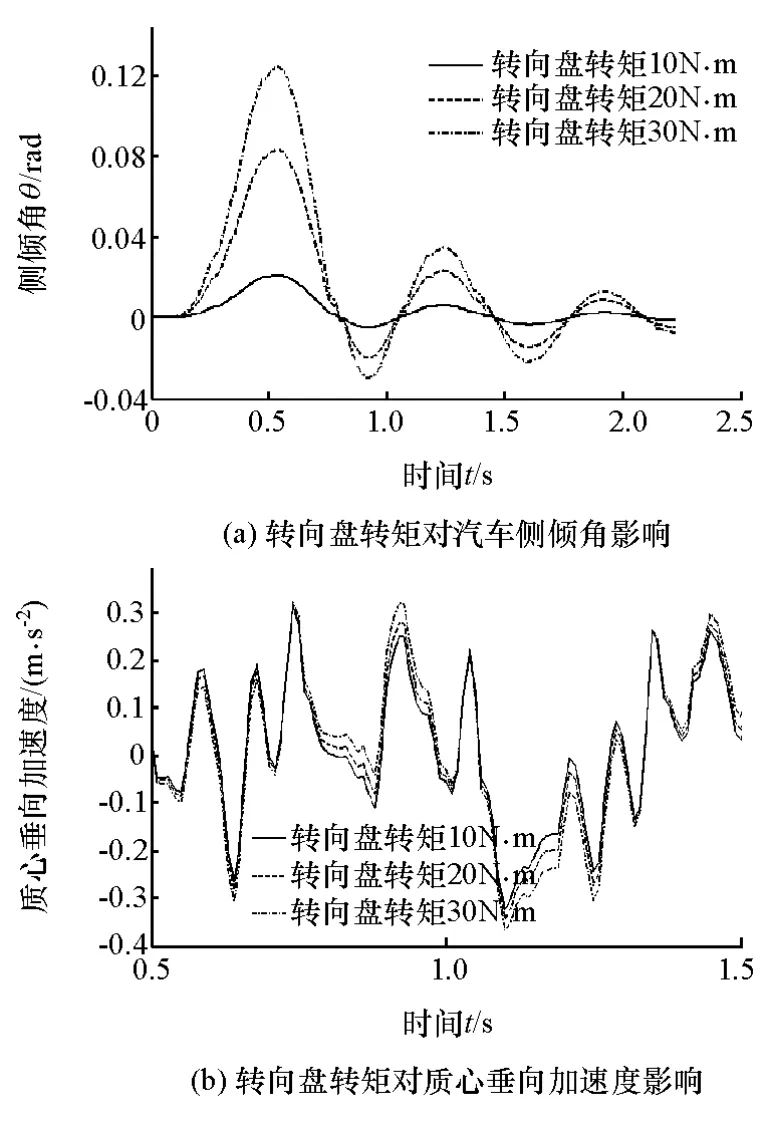
圖4 轉向盤轉矩對懸架系統的影響
由圖4可知:隨著轉向盤轉矩的增大,整車側傾角逐漸變大。3種轉矩下的側傾角峰值分別為0.018,0.081和0.122rad,相比于轉矩為10N.m時的側傾角大小分別遞增了0.063和0.104rad。圖4(b)中質心垂向加速度為局部放大圖,在轉向盤輸入轉矩為10,20和30N.m時,算得的質心垂向加速度均方根值分別為0.121,0.129和0.142m/s2,可見轉向盤轉矩變大,質心振動越明顯,對舒適性影響越大,此時需增加外側的空氣懸架阻尼,以抑制車身向該側傾斜。
(2)制動工況,B級路面,車速為15m/s,在車輪制動力矩分別為250,350和450N.m,仿真結果如圖5所示。
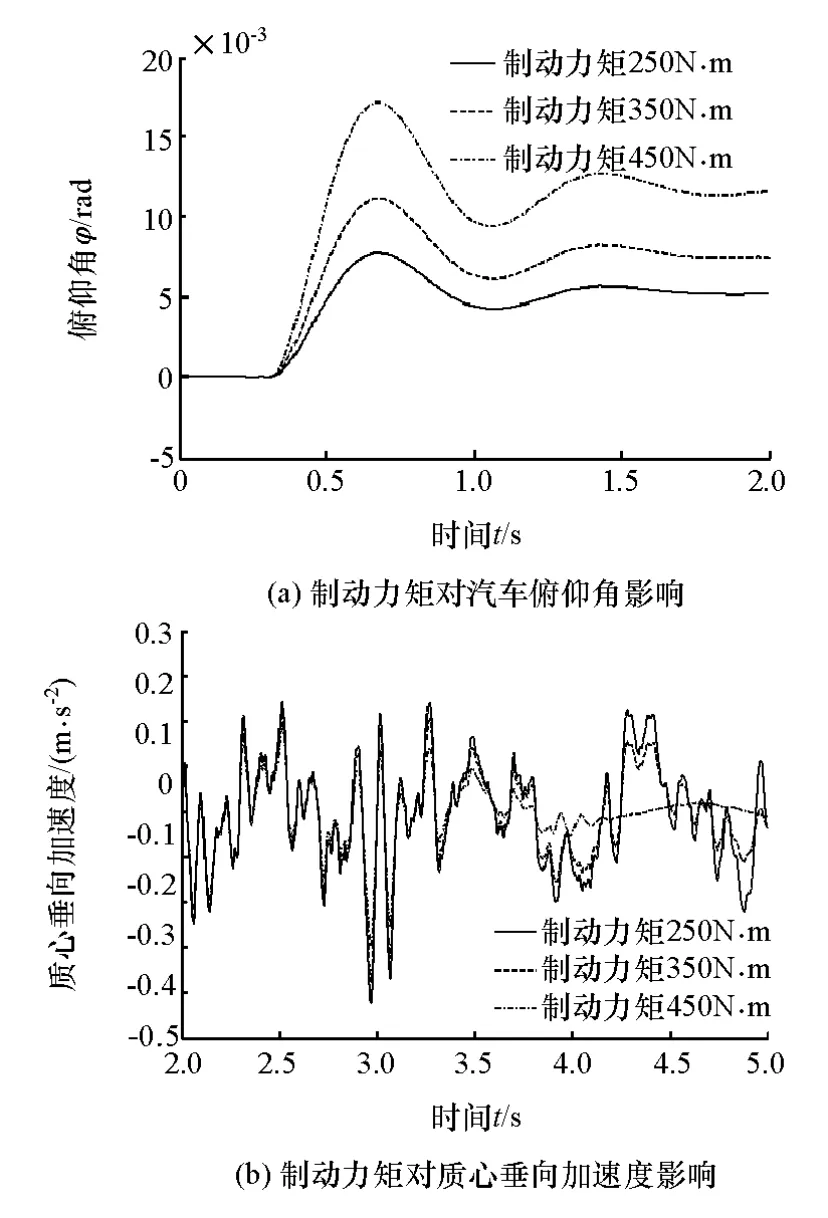
圖5 制動力矩對懸架系統的影響
由圖5(a)可知,隨著汽車制動力矩的增加,俯仰角增大。而由圖5(b)可見,當汽車制動力矩增加時,其質心垂向加速度在最初呈現略微減小趨勢,隨后差異越發明顯。
(3)轉向制動工況,B級白噪聲路面,車速為15m/s,轉向盤轉矩在 0.3s時刻由 0階躍至20N.m,車輪制動力矩在 1.5s時刻由0階躍至350N.m,仿真結果如圖6所示。
由圖6可知,在1.5s時刻,轉向與制動工況同時出現,汽車側傾角急劇減小,此時由于制動力矩的施加,車輛發生俯仰現象,其俯仰角急劇增加到達峰值后經過一定的波動而漸趨穩定。而側傾角的減小說明制動時,車輛各車輪所承受載荷的轉移改變了車身原本的垂向動力學特征,圖6(c)表達了車輪垂直載荷分布關系,圖中曲線出現兩次分叉現象,分別在0.3s時轉向的介入和1.5s時刻制動的產生所導致的左右輪與前后軸間的載荷偏移。
3 電控空氣懸架控制策略
3.1 控制策略制定
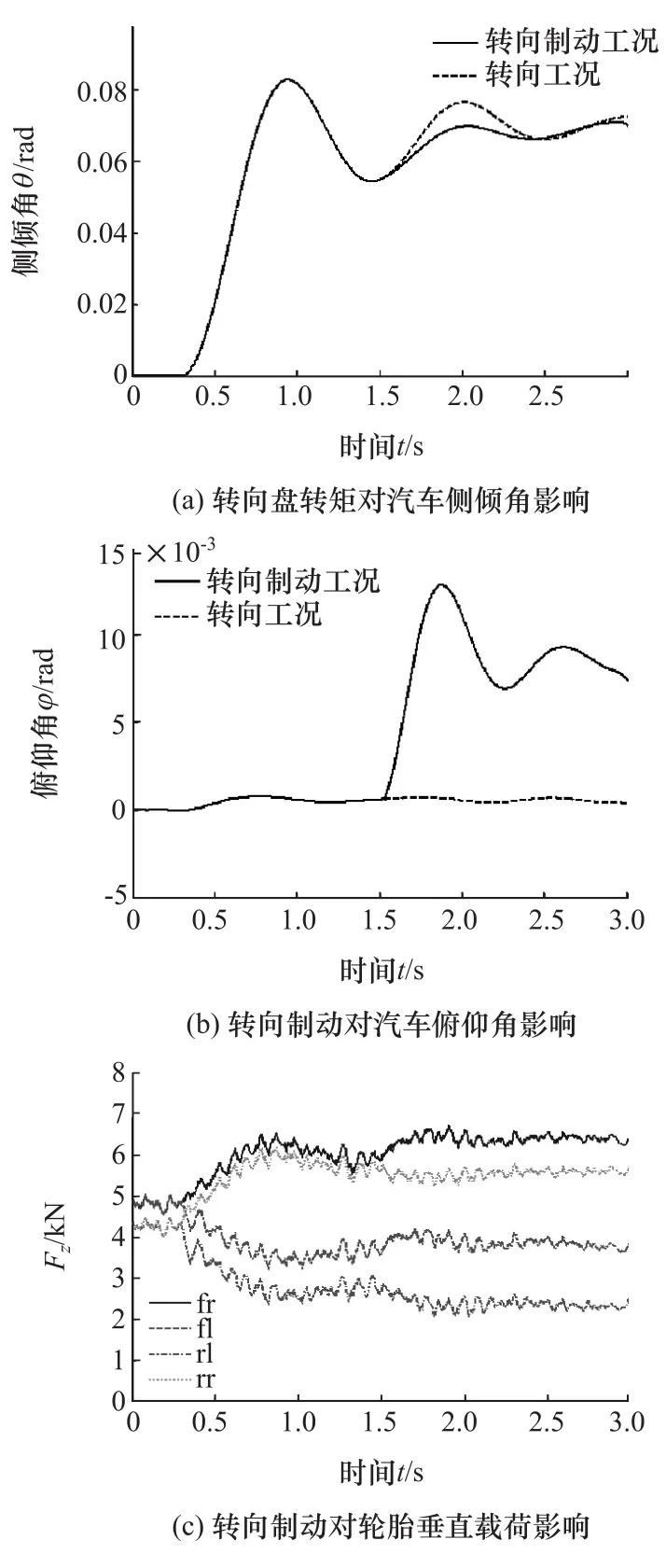
圖6 轉向和制動對懸架系統的影響
由仿真分析可知,在轉向、制動和轉向制動等典型工況下,EPS和ESP系統工作將會不同程度地影響車身側傾、俯仰和垂直振動加速度等性能,據此制定ECAS的控制方案如下:
(1)Td≥T0,γ≤γ?且 β≤β?時,車輛在轉彎時能穩定轉向,此時懸架的性能控制以車身側傾角和垂直振動加速度為主,通過控制電流提升汽車外側懸架系統的阻尼;
(2)Td≥T0,γ≥γ?且 β≥β?時,車輛處于嚴重轉向失穩狀態,ESP系統快速介入,盡可能削弱汽車的俯仰現象,此種情況以車身俯仰角作為懸架性能提升的重要參考依據;
(3)Td≥T0,γ≥γ?且 β≤β?時,車輛需要 EPS和ESP共同控制,此時以側傾角、俯仰角和質心垂直振動加速度綜合控制作為電控空氣懸架控制的主要目標。
3.2 控制系統設計
依據上述控制方案設計整車電控空氣懸架控制系統,如圖7所示。
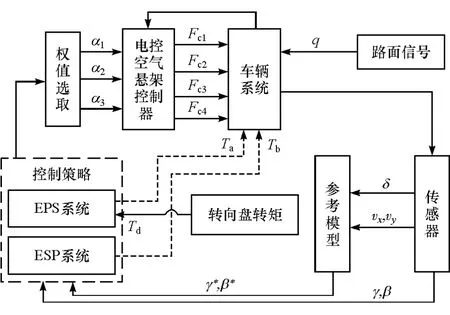
圖7 控制系統圖
該系統通過實時接收傳感器所采集的車速信號和轉向盤轉矩數據對汽車所處工況進行判斷,參考模型在各時刻計算出理想的橫擺角速度和質心側偏角,并與實際數據進行對比,判斷EPS和ESP系統是否介入整車所處的運行工況。根據EPS和ESP分別對懸架側傾、俯仰和垂向運動的影響程度,選擇相應的權值系數 α1,α2,α3,加權后作為電控空氣懸架控制器的輸入,并由電控空氣懸架控制器輸出實際需要的懸架阻尼控制電流Ici,形成相應的阻尼力 Fci(i=1,2,3,4),對車身狀態進行調整。
3.3 控制器設計
考慮到EPS和ESP對電控空氣懸架的影響,控制輸入為側傾角、俯仰角和垂向加速度加權后之和E(φ,θ):

式中:α1,α2,α3為相應的權重系數,α1,α2,α3之和為1。在EPS和ESP系統運行的不同工況下,對權重系數 α1,α2,α3進行合理分配[11]。 輸出為 4 個調節懸架阻尼大小的控制電流Ici。
采用PID控制策略,并通過粒子群算法優化得到控制器參數,其優化流程如下:
(1)初始化粒子群,設定初始位置和速度;
(2)將種群中每個個體依次賦值給PID控制器參數Kp,Ki和Kd,并通過控制器求出空氣懸架的阻尼控制電流Ici作用于整車模型;
(3)求出每個粒子的適應值,考慮電控空氣懸架的綜合性能,選取的適應度函數為

(4)將每個粒子經歷過的最優位置適應度值和粒子群體所經歷過的最優位置適應度值作比較,將其較好者作為最優位置;
(5)根據步驟(4),對粒子的位置和速度進行更新;
(6)若未滿足終止條件,返回步驟(2),否則,得到最優解。
3.4 仿真分析
當車速在15m/s時,轉向盤階躍輸入轉矩為20N.m,路面為B級白噪聲路面,仿真結果如圖8所示。由圖可見:基于粒子群的懸架PID控制與PID控制、無控制相比,整車側傾角瞬態響應峰值分別減小了16.12%和21.69%,穩態值分別減小了4.36%和10.43%;俯仰角瞬態響應峰值分別減小了45.21%和70.22%;而根據圖8(c)的質心垂向加速度算得的質心垂向加速度均方根值分別減小了21.31%和42.38%,說明在考慮EPS和ESP系統的影響下對電控空氣懸架搭建的粒子群PID控制能很好地提高整車平順性。
4 硬件在環試驗驗證
4.1 硬件在環平臺搭建
為對以上所設計的懸架控制系統性能進行驗證,基于NI-PXI實時控制平臺,搭建了懸架系統硬件在環試驗平臺,其硬件系統主要包括實時控制器、PC機、交換機和 TCP/IP總線。選用安裝有LabVIEW Real-Time實時操作系統的PXI-8102嵌入式控制器作為下位機,利用Matlab軟件的RTW(real-time workshop)模塊將上述控制器模型進行編譯,并通過NI-veristand工作區進行加載調用,同時在該工作區內實現對懸架系統模型與控制器之間的端口映射關系配對。PC機作為上位機,主要對系統模型的運行狀態進行實時監測與在線控制。交換機和TCP/IP總線作為網絡通信口,將PXI-8102實時控制器與PC機串聯在同一子網中,實現信息的傳遞互通。為更準確地模擬預測汽車在實際移線變道過程中的整車狀態參數,本文中依據ISO3888—2車輛移線性能試驗標準開展了實車數據采集試驗,利用轉向盤轉矩傳感器和米銥位移傳感器等對汽車在移線試驗過程中的性能狀態參數進行采集。
4.2 試驗結果與分析
由位移傳感器測得的路面輸入如圖9所示,而由轉矩傳感器測得的轉向盤轉矩輸入如圖10所示。車速設定為15m/s,附著系數為0.7,試驗結果如圖11所示。
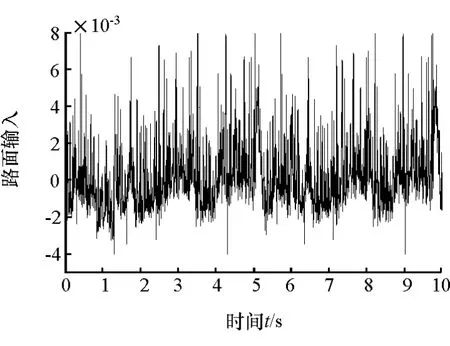
圖9 路面輸入
由圖11可見:硬件在環試驗與軟件仿真的結果趨勢基本一致。考慮在EPS和ESP系統的工作影響下,搭建的基于粒子群PID電控空氣懸架控制器,能更好地改善電控空氣懸架的平順性,提高行駛安全性。
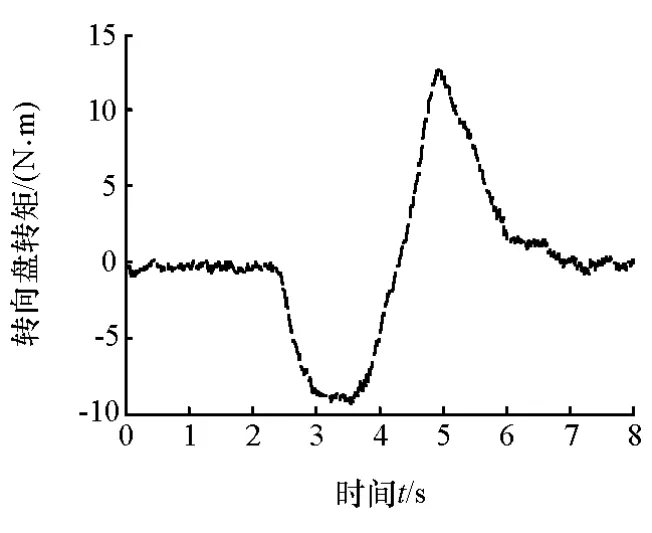
圖10 轉向盤轉矩輸入
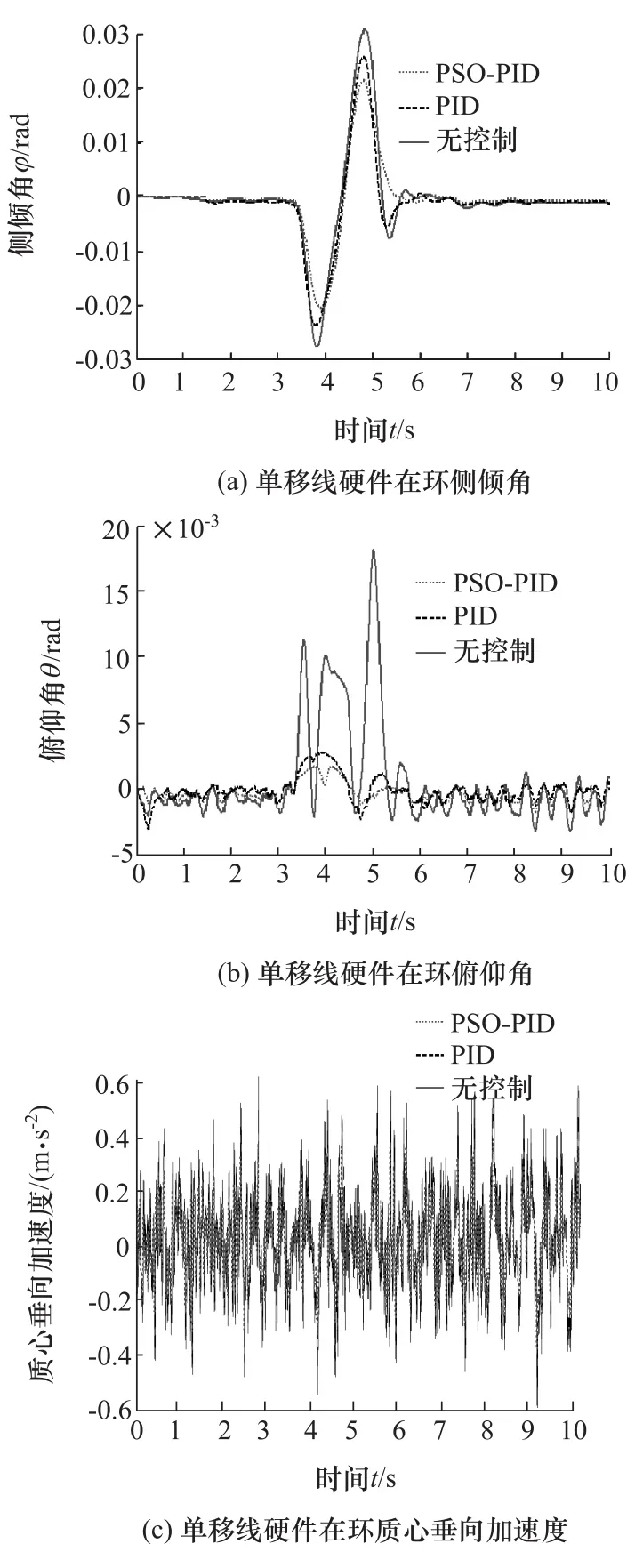
圖11 單移線硬件在環實驗結果
5 結論
(1)通過對汽車行駛狀態的判斷,設計了綜合考慮EPS和ESP工作時對電控空氣懸架控制系統的影響,設計了基于粒子群優化算法的電控空氣懸架系統PID控制器;
(2)開展了控制系統性能仿真與硬件在環試驗,結果表明:整車側傾角、俯仰角和垂向加速度均有減小,其中初始車速15m/s的單移線工況汽車側傾角峰值由無控制時的0.031降低到0.021rad,俯仰角峰值降低了16%,質心垂向加速度均方根值也比無控制時減小了32.91%,表明該控制系統的有效性,為下一步電控空氣懸架系統控制器的開發打下了良好的基礎。
[1] KIM Hyunsup,LEE Hyeongcheol.Height and leveling control of automotive air suspension system using sliding mode approach[J].IEEE transactions on vehicular technology,2011,60(5):2027-2041.
[2] PRABU K, JANCIRANI J, DENNIE J.Experimental investigation on road vehicle active suspension[J].Strojniski Vestnik-Journal of Mechanical Engineering,2013,59(10):620-625.
[3] 汪少華,竇輝,孫曉強,等.電控空氣懸架車高調節與整車姿態控制研究[J].農業機械學報,2015,46(10):335-342,356.
[4] 孫曉強,陳龍,汪少華,等.半主動空氣懸架阻尼多模型自適應控制研究[J].農業機械學報,2015,46(3):351-357.
[5] 葉光湖,吳光強.汽車磁流變減振器半主動空氣懸架仿真研究[J].汽車工程,2015,37(5):560-565.
[6] 陳月霞,陳龍,徐興,等.隨機干擾下電控空氣懸架整車車身高度控制研究[J].農業機械學報,2015,46(12):309-315.
[7] 黃晨,陳龍,袁朝春,等.基于頂層設計的轉向與懸架系統協同控制的研究[J].汽車工程,2015,37(10):1156-1160.
[8] 楊啟耀,張文娜,王存寶,等.空氣懸架彈性元件特性的理論研究[J].安徽建筑工業學院學報,2010,18(6):89-91.
[9] 陳無畏,周慧會,劉翔宇.汽車ESP與ASS分層協調控制研究[J].機械工程學報,2009,45(8):190-196.
[10] 王其東,秦煒華,陳無畏.基于多剛體動力學和規則協調的汽車EPS與ASS建模與控制[J].中國機械工程,2010,21(14):1709-1714.
[11] 袁傳義,陳龍,劉成曄,等.EPS與主動懸架系統自適應模糊集成控制的仿真與試驗研究[J].汽車工程,2010,32(1):22-25.
Control Strategy for Electronically Controlled Air Suspension System with Consideration of the Coupling Between EPSand ESP
Chen Liqing,Zheng Shuang& Cao Kai
College of Engineering, Anhui Agricultural University, Hefei 230036
For improving the ride comfort of vehicle under various operating conditions,a control strategy for electrically-controlled air suspension(ECAS)is proposed with consideration of the coupling of electric power steering system and electronic stability system.Firstly, a 10 DOF vehicle model is set up with Matlab/Simulink, and the effects of ESP and EPSon the ride comfort of ECAS is analyzed.Then,a PID controller of ECAS is designed based on particle swarm algorithm.Finally,a hardware-in-the-loop test platform for ECAScontroller is built based on NI-PXI real-time controller.The test results show that under a road adhesion coefficient of 0.7 and a vehicle speed of 50km/h, the control system proposed can reduce the peak roll angle from 0.031rad to 0.021rad,with the peak pitching angle and the mean square root of vertical acceleration of mass center lowering by 16%and 32.91%respectively,compared with that without control.
ECAS;coupling;PSO algorithm;hardware-in-the-loop test
10.19562/j.chinasae.qcgc.2017.11.006
?國家自然科學基金(51305004)資助。
原稿收到日期為2016年11月25日,修改稿收到日期為2016年12月14日。
陳黎卿,教授,博士,E-mail:clq79111@ 126.com。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50